Изобретение относится к области измерения таких динамических параметров объекта, как скорость и перемещение, и может быть использовано в различных областях, в том числе и в задачах строительства и машиностроения для исследования деформационных характеристик грунтов, моделирования взаимодействия рабочих органов строительных машин с грунтом.
Из существующего уровня техники известен способ измерения скорости объекта (и устройство для его осуществления), использующий пучок когерентного излучения, перемещаемый по линии, параллельной направлению движения объекта с заданной частотой и амплитудой, далее формируют реализации принятых сигналов, синхронизированные с перемещением пучка, и по величине задержки между сигналами определяют мгновенную скорость объекта (RU 2262112, МПК G01P 3/68, C2, опубл. 20.05.2005). Недостатками данного способа являются: соосное расположение элементов устройства для перемещения когерентного излучения и направления движения исследуемого объекта, а также возможность одновременного слежения только за одним объектом.
Также известен способ регистрации быстропротекающих процессов (и устройство для его реализации), сущность которого заключается в том, что выполняют съемку в однокадровом режиме с требуемым для данного процесса исследования временем экспозиций выбранного участка области исследования путем применения электронно-оптической видеокамеры с подсветкой выбранного участка в момент срабатывания регистрирующей аппаратуры, при этом дополнительно осуществляют съемку в однокадровом режиме, по крайней мере, еще одного локального участка области исследования с помощью дополнительной электронно-оптической видеокамеры с источником подсветки данного участка и дополнительно регистрируют теневое изображение выбранных локальных участков области исследования за счет использования рентгеновского излучения, при этом осуществляют покадровую видеосъемку области исследования дополнительной скоростной видеокамерой с длительностью регистрации, соответствующей длительности процесса исследования (RU 2438119, МПК G01N 23/04, C1, опубл. 27.12.2011).
Недостатками данного способа являются: использование нескольких видеокамер для регистрации динамики процесса, причем каждая камера выполняет съемку в однокадровом режиме.
Задачей изобретения является упрощение процесса регистрации динамики процесса, позволяющее производить одновременный анализ динамики различных частей исследуемого объекта и сохранить результаты измерений в наглядной форме в виде отдельных кадров.
Данный технический результат достигается тем, что в способе бесконтактного измерения скорости и перемещения объекта с помощью скоростной видеокамеры исследуемый объект, освещенный источником подсветки области исследования - «осветителем», жестко закрепляют на штоке, перемещающемся по направляющим с горизонтальной меткой, видеокамеру устанавливают по отношению к исследуемому объекту таким образом, чтобы ее оптическая ось была перпендикулярна плоскости движения исследуемого объекта и направлена на горизонтальную метку, а максимальное расстояние Lmax между видеокамерой, установленной на штативе, и исследуемым объектом определяется по формуле:
где
Δp - глубина резко изображаемого пространства, равная размеру исследуемого объекта параллельно оси видеокамеры;
f′ - заднее фокусное расстояние объектива видеокамеры;
dдоп - величина допустимого диаметра кружка нерезкости в плоскости исследуемого объекта;
Кг - диафрагменное число,
максимальное расстояние Smax между осветителем и исследуемым объектом определяют по формуле:
где
ρм - коэффициент отражения исследуемого объекта;
τ0 - коэффициент пропускания объектива;
δ - световая отдача осветителя;
Nu - электрическая мощность осветителя;
α - угол, образованный нормалью к плоскости освещения с направлением на осветитель;
Ес - чувствительность сенсора видеокамеры, одновременно с началом движения исследуемого объекта включают видеокамеру, которая покадрово фиксирует перемещение делений мерной линейки относительно горизонтальной метки, сравнивают значения делений мерной линейки, совпадающих с горизонтальной меткой, на следующих друг за другом кадрах, и, учитывая перемещение исследуемого объекта Δh и скорость видеосъемки n, рассчитывают скорость V исследуемого объекта по формуле:
V=Δh·n,
где
Δh - перемещение исследуемого объекта; n - скорость видеосъемки.
Значение максимального расстояния Lmax между видеокамерой, установленной на штативе, и исследуемым объектом получаем, используя следующие величины.
Величину допустимого диаметра кружка нерезкости dдоп в плоскости объекта наблюдения определяем требованиями точности определения линейных размеров объекта наблюдения dm:

Поскольку объектом съемки является пространственная модель, имеющая линейные ортогональные размеры съемки, то для гарантированной регистрации движения всех точек объекта съемки необходимо обеспечить в процессе экспериментальных исследований выполнение условия (1). Соблюдение этого требования должна обеспечить соответствующая величина глубины резкости изображаемого пространства (РИП) Δp:

где
pзад - расстояния до задней границы РИП, м;
pпер - расстояния до передней границы РИП, м.
Расстояния до задней границы РИП pзад определяют по формуле [Проектирование фото- и киноприборов. / С.В.Кулагин, Е.М.Апарин. - М.: Машиностроение, 1986. - 280 с., стр.55]:

где D - диаметр входного зрачка объектива, м;
f′ - заднее фокусное расстояние, м;
pнав - расстояние от плоскости входного зрачка до плоскости наводки, м.
Расстояния до передней границы РИП pпер определяют по формуле [Проектирование фото- и киноприборов. / С.В.Кулагин, Е.М.Апарин. - М.: Машиностроение, 1986. - 280 с., стр.55]:

Таким образом, подставляя формулы (3) и (4) в уравнение (2), глубину РИП можно определить с помощью следующей приближенной формулы:

Поскольку регистрацию ударного воздействия модели на грунт предполагается производить с расстояния, исключающего повреждение объектива и видеокамеры частицами грунта и обеспечивающего минимальное вибрационное воздействие удара на процесс съемки, то с достаточной степенью точности можно принять следующее условие:

где lнабл - расстояние наблюдения от передней поверхности объектива видеокамеры до объекта съемки, м.
С учетом вышесказанного глубина РИЛ равна:

Как правило, все объективы снабжены диафрагмой - устройством для регулировки относительного отверстия, которое позволяет изменять количество проходящего через объектив света, а также устанавливать необходимую глубину резкости, то есть регулировать глубину РИП. Поэтому с учетом равенства [Вычислительная оптика: Справочник / М.М.Русинов, А.П.Грамматин, П.Д.Иванов и др. Под общ. Ред. М.М.Русинова. - Л.: Машиностроение. Ленингр. отд., 1984. - 423 с., стр.5]:

где Кг - диафрагменное число, уравнение (7) будет иметь следующий вид:

Таким образом, максимальное расстояние наблюдения Lmax можно рассчитать по формуле:
где
Δp - глубина резко изображаемого пространства, равная размеру исследуемого объекта параллельно оси видеокамеры;
f′ - заднее фокусное расстояние объектива видеокамеры;
dдоп - величина допустимого диаметра кружка нерезкости в плоскости исследуемого объекта;
Кг - диафрагменное число.
Для обеспечения нормальных условий работы скоростной видеокамеры необходимо обеспечить освещенность E ее сенсора не меньше пороговой величины Ес, указанной в паспорте:

Освещенность E сенсора видеокамеры можно определить по формуле [Вычислительная оптика: Справочник / М.М.Русинов, А.П.Грамматин, П.Д.Иванов и др. Под общ. Ред. М.М.Русинова. - Л.: Машиностроение. Ленингр. отд-ние, 1984. - 423 с., стр.91]:

где ρм - коэффициент отражения исследуемого объекта;
τ0 - коэффициент пропускания объектива скоростной видеокамеры;
J - сила света источника, кд;
α - угол, образованный нормалью к плоскости освещения с направлением на источник, град.;
r - расстояние от источника света до сенсора видеокамеры вдоль ее оптической оси, м.
Силу света источника J рассчитывают по формуле [Инженерная оптика / И.Л.Сакин. - Л.: Машиностроение. Ленингр. отд-ние, 1976. - 288 с, стр.134]:

где Фu - световой поток, создаваемый источником освещения, лм;
π - математическая константа, π=3,14159…
Значения светового потока для различных источников приводят в их паспортах. При отсутствии паспортных данных на данный источник его световой поток можно определить, умножая значение световой отдачи δ на величину электрической мощности Nu источника излучения [Справочник по элементарной физике. / Н.И.Кошкин, М.Г.Ширкевич. - 8-е изд. перераб. - М.: Наука. Главная редакция физико-математической литературы, 1980. - 208 с., стр.173].

Расстояние r от источника до сенсора видеокамеры вдоль ее оптической оси равно: 
где Lmax - максимальное расстояние между видеокамерой и объектом наблюдения, м;
Sосв - расстояние от источника света до освещаемого объекта, м.
С учетом уравнений (13)-(15) уравнение (12) будет иметь следующий вид:

Таким образом, максимальное расстояние Smax между осветителем и исследуемым объектом определяют по формуле:
где
ρм - коэффициент отражения исследуемого объекта;
τ0 - коэффициента пропускания объектива;
δ - световая отдача осветителя;
Nu - электрическая мощность осветителя;
π - математическая константа, π=3,14159…;
α - угол, образованный нормалью к плоскости освещения с направлением на осветитель;
Ес - чувствительность сенсора видеокамеры.
Одновременно с началом движения исследуемого объекта включают видеокамеру, которая покадрово фиксирует перемещение делений мерной линейки относительно горизонтальной метки, сравнивают значения делений мерной линейки, совпадающих с горизонтальной меткой, на следующих друг за другом кадрах, и, учитывая перемещение исследуемого объекта Δh и скорость видеосъемки n, рассчитывают скорость V исследуемого объекта по формуле:
V=Δh·n,
где
Δh - перемещение исследуемого объекта;
n - скорость видеосъемки.
Так как в экспериментальных исследованиях используется песок средней крупности (грунт) со средним размером частиц 0,38 мм, то регистрацию перемещения частиц грунта под действием внешней силы планируется выполнять с точностью до dm=dдоп=0,1 мм. Коэффициент отражения песка (отношение отраженной энергии к падающей на объект энергии) зависит от его дисперсности и увеличивается от 0,4 до 0,8 с уменьшением размера частиц. Для песка средней крупности принимаем ρм=0,4.
Для видеосъемки предлагается использовать скоростную видеокамеру ТМС-6740 GE. Чувствительность сенсора видеокамеры ТМС-6740 GE равна Ес=1,4 лк.
Совместно с камерой предлагается использовать объектив Navitar DO-5095, который имеет следующие основные характеристики:
- фокусное расстояние f′=50 мм;
- диафрагменное число Кг=0,95÷16;
- угловое поле в пространстве предметов 2ω(H×V)=14°36′×11°00′;
- коэффициента пропускания τo=0,785.
Диафрагменное число объектива примем равным Кг=5. Глубину РИП примем равной диаметру основания объекта съемки - конической модели - Δp=45 мм.
В качестве источника света предлагается использовать лампу накаливания Б220-230-100 (ГОСТ Р МЭК 60064-99) мощностью Nu=100 Вт со световой отдачей 
Тогда максимальное расстояние Lmax между видеокамерой, установленной на штативе, и исследуемым объектом будет равно:

Максимальное расстояние Smax между осветителем и исследуемым объектом будет равно:
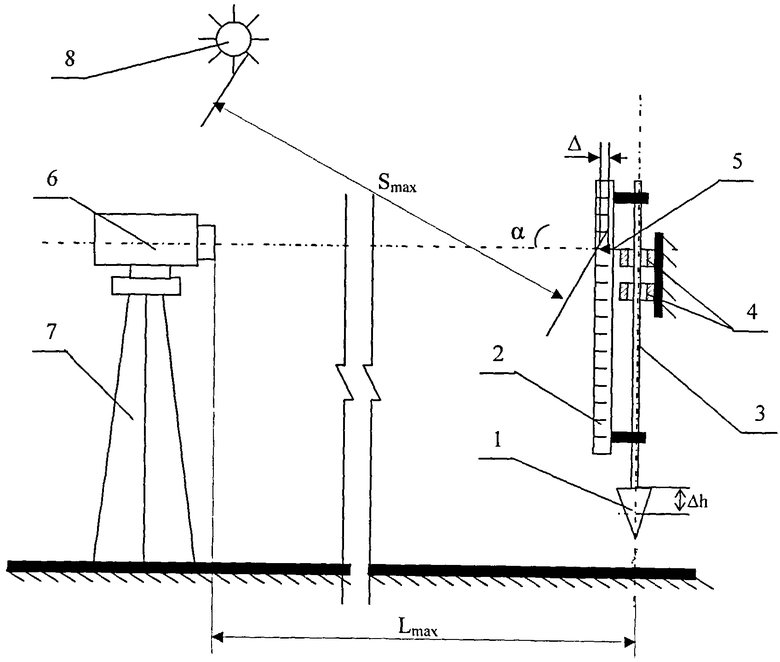
На фиг.1 изображена схема устройства для бесконтактного измерения скорости и перемещения объекта.
Для реализации способа бесконтактного измерения скорости и перемещения объекта с помощью скоростной видеокамеры исследуемый объект 1 с мерной линейкой 2 с делениями жестко закреплен на штоке 3 с возможностью перемещения в вертикальной плоскости в направляющих 4.
На направляющих 4 жестко закреплена горизонтальная метка 5, перекрывающая деления мерной линейки 2 на величину Δ. На расстоянии Lmax от оси исследуемого объекта 1 расположена видеокамера 6, установленная на штативе 7. Для освещения исследуемого объекта 1 используется источник подсветки области исследования «осветитель» 8, расположенный на расстоянии Smax от исследуемого объекта 1 под углом α, образованным нормалью к плоскости освещения, совпадающей с оптической осью видеокамеры, и направлением на «осветитель» 8.
Рассмотрим конкретный пример реализации предлагаемого способа. На расстоянии Lmax от исследуемого объекта 1 устанавливают видеокамеру 6 так, чтобы ее оптическая ось была перпендикулярна плоскости движения исследуемого объекта 1 и направлена на горизонтальную метку 5. На расстоянии Smax от исследуемого объекта устанавливают «осветитель» 8 под углом α к оптической оси видеокамеры 6. Одновременно с началом движения исследуемого объекта 1 включают видеокамеру 6, которая покадрово фиксирует перемещение в поле зрения видеокамеры 6 относительно горизонтальной метки 5 делений мерной линейки 2, жестко связанной штоком 3 с исследуемым объектом 1. После окончания покадровой видеосъемки сравнивают значения делений мерной линейки 2, совпадающих с горизонтальной меткой 5, на следующих друг за другом кадрах и рассчитывают текущее перемещение Δh исследуемого объекта 1 за промежуток времени, равный смене одного кадра другим. Учитывая перемещение Δh исследуемого объекта 1 от кадра к кадру и скорость видеосъемки n, рассчитывают скорость V исследуемого объекта 1.
Таким образом, использование предлагаемого изобретения позволяет усовершенствовать процесс регистрации динамики процесса и позволяет производить одновременный анализ динамики различных частей исследуемого объекта и сохранить результаты измерений в наглядной форме в виде отдельных кадров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ | 2013 |
|
RU2534962C2 |
| СПОСОБ СКАНИРОВАНИЯ ИЗОБРАЖЕНИЙ МИКРОРЕЛЬЕФА БОКОВЫХ ПОВЕРХНОСТЕЙ СТРЕЛЯНЫХ ПУЛЬ И ГИЛЬЗ И УСТРОЙСТВО СКАНИРОВАНИЯ ИЗОБРАЖЕНИЙ СТРЕЛЯНЫХ ПУЛЬ И ГИЛЬЗ АВТОМАТИЗИРОВАННОГО БАЛЛИСТИЧЕСКОГО ИДЕНТИФИКАЦИОННОГО КОМПЛЕКСА | 2006 |
|
RU2315353C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЦВЕТА ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2312314C2 |
| Стереодисплей и видеокамера для съёмки 3D-видеоизображений для этого стереодисплея | 2019 |
|
RU2840856C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| Стереодисплей (варианты), видеокамера для стереосъёмки и способ компьютерного формирования стереоизображений для этого стереодисплея | 2017 |
|
RU2698919C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГОГО ПРОГИБА ЖЕЛЕЗНОДОРОЖНЫХ РЕЛЬСОВ | 2006 |
|
RU2319803C1 |
| СПОСОБ И УСТРОЙСТВО ВИДЕОНАБЛЮДЕНИЯ | 2009 |
|
RU2436255C2 |
| СПОСОБ КОЛИЧЕСТВЕННОЙ ОЦЕНКИ ПРОФИЛЯ И СОСТАВА ПРИТОКА В МАЛОДЕБИТНЫХ ОБВОДНЕННЫХ НЕФТЯНЫХ СКВАЖИНАХ | 2018 |
|
RU2724814C2 |
| СПОСОБ ИЗМЕРЕНИЯ СРЕДНЕЙ ДИСПЕРСИИ СВЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2563310C2 |
Изобретение относится к области измерения таких динамических параметров объекта, как скорость и перемещение. Исследуемый объект, освещенный осветителем, закрепляют на штоке, перемещающемся по направляющим с горизонтальной меткой. Видеокамеру устанавливают по отношению к исследуемому объекту таким образом, чтобы ее оптическая ось была перпендикулярна плоскости движения исследуемого объекта и направлена на горизонтальную метку. Одновременно с началом движения исследуемого объекта включают видеокамеру, которая покадрово фиксирует перемещение делений мерной линейки относительно горизонтальной метки, сравнивают значения делений мерной линейки, совпадающих с горизонтальной меткой, на следующих друг за другом кадрах и, учитывая перемещение исследуемого объекта и скорость видеосъемки, рассчитывают скорость исследуемого объекта. Изобретение позволяет усовершенствовать процесс регистрации динамики процесса и позволяет производить одновременный анализ динамики различных частей исследуемого объекта и сохранить результаты измерений в наглядной форме в виде отдельных кадров. 2 н.п. ф-лы, 1 ил.
1. Способ бесконтактного измерения скорости и перемещения объекта с помощью скоростной видеокамеры заключается в том, что исследуемый объект, освещенный осветителем, закрепляют на штоке, перемещающемся по направляющим с горизонтальной меткой, видеокамеру устанавливают по отношению к исследуемому объекту таким образом, чтобы ее оптическая ось была перпендикулярна плоскости движения исследуемого объекта и направлена на горизонтальную метку, а максимальное расстояние Lmax между видеокамерой, установленной на штативе, и исследуемым объектом определяется по формуле:
где
Δp - глубина резко изображаемого пространства, равная размеру исследуемого объекта параллельно оси видеокамеры;
f′ - заднее фокусное расстояние объектива видеокамеры;
dдоп - величина допустимого диаметра кружка контрастности в плоскости исследуемого объекта;
Кг - диафрагменное число,
а максимальное расстояние Smax между осветителем и исследуемым объектом определяют по формуле:
где
ρм - коэффициент отражения исследуемого объекта;
τ0 - коэффициента пропускания объектива;
δ - световая отдача осветителя;
Nu - электрическая мощность осветителя;
α - угол, образованный нормалью к плоскости освещения с направлением на осветитель;
Eс - чувствительность сенсора видеокамеры,
одновременно с началом движения исследуемого объекта включают видеокамеру, которая покадрово фиксирует перемещение делений мерной линейки относительно горизонтальной метки, сравнивают значения делений мерной линейки, совпадающих с горизонтальной меткой, на следующих друг за другом кадрах, и, учитывая перемещение исследуемого объекта Δh и скорость видеосъемки n, рассчитывают скорость V исследуемого объекта по формуле:
V=Δh·n,
где
Δh - перемещение исследуемого объекта;
n - скорость видеосъемки.
2. Устройство для бесконтактного измерения скорости и перемещения объекта с помощью скоростной видеокамеры, включающее видеокамеру, источник подсветки области исследования - «осветитель» и исследуемый объект, отличающееся тем, что исследуемый объект жестко закреплен на штоке с мерной линейкой с возможностью перемещения в вертикальной плоскости в направляющих, на которых жестко закреплена горизонтальная метка, перекрывающая деления мерной линейки на величину Δ, видеокамера устройства установлена на расстоянии Lmax от оси исследуемого объекта на штативе, а источник подсветки области исследования - «осветитель» расположен на расстоянии Smax от исследуемого объекта под углом α, образованным нормалью к плоскости освещения, совпадающей с оптической осью видеокамеры, и направлением на «осветитель».
| СПОСОБ РЕГИСТРАЦИИ БЫСТРОПРОТЕКАЮЩИХ ПРОЦЕССОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2438119C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2262112C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2442218C1 |
| Устройство для измерения скорости перемещения объекта | 1977 |
|
SU654906A1 |
| US 6992756 B1, 31.01.2006 | |||
| УСТРОЙСТВО КОДИРОВАНИЯ НА ПОВЕРХНОСТНЫХ АКУСТИЧЕСКИХ ВОЛНАХ ДЛЯ ПАССИВНОГО ТРАНСПОНДЕРА | 2004 |
|
RU2270517C1 |
| WO 2011089893 A1, 28.07.2011 | |||
| JP 62201365 A, 05.09.1987 | |||

