Уровень техники, к которому относится изобретение
Возможность определения местоположения людей, транспортных средств и т.п. в последние годы стала более важной, особенно ввиду нововведенных технологий и возросших интересов к сохранности и безопасности. Местоположение человека или транспортного средства может быть определено посредством определения местоположения мобильного устройства радиосвязи, перемещаемого человеком или транспортным средством. К примеру, желательно обеспечить систему сотовой телефонной связи с возможностью определения географического местоположения отдельного сотового телефона, используемого для сообщения о критической ситуации для того, чтобы о таком местоположении можно было сообщить сотрудникам спасательных служб, например, полицейской, противопожарной и аварийной служб.
На Земле доступны несколько схем для определения местоположения. Один способ определения местоположения предполагает использование глобальной системы определения местоположения (GPS). Первоначально глобальная система определения местоположения (GPS) была задумана и разработана Министерством обороны США в качестве военной навигационной системы. Со временем элементы системы становились все более и более доступными для гражданского использования. Глобальная система определения местоположения (GPS) использует комбинацию из 24 спутников, находящихся на геостационарной орбите, в соответствии с чем, местоположение может быть определено посредством расчета времени прохождения сигнала со спутника глобальной системы определения местоположения (GPS) на приемник глобальной системы определения местоположения (GPS). Пять резервных орбитальных спутников обеспечиваются, прежде всего, для резервирования на случай того, если один из этих 24 спутников выйдет из строя. Спутники передают сигналы с расширенным спектром по двум полосам частот: L1 (1575,42 МГц) и L2 (1223,6 МГц). Сигналы модулируются посредством двух псевдослучайных шумовых кодов: «грубого» (C/A) кода и «точного» (P) кода. Код C/A на полосе L1 является кодом, подходящим для гражданских приложений. Кроме того, сигнал глобальной системы определения местоположения (GPS) модулируется с информационным сообщением, обычно называемым «навигационное сообщение глобальной системы определения местоположения (GPS)».
Как правило, для определения местоположения приемник глобальной системы определения местоположения (GPS) использует схему трилатерации. Например, информация о местоположении, произведенная глобальной системой определения местоположения (GPS), может быть достигнута посредством использования двумерной трилатерации. Например, сигналы с трех спутников могут быть использованы для определения местоположения на основании пересечения трех пересекающихся кругов. Более конкретно, каждый спутниковый сигнал может обеспечить радиус, в котором может быть расположен приемник глобальной системы определения местоположения (GPS). Два пересекающихся радиуса позволяют процессу определения местоположения ограничиться областью пересечения. Другой спутниковый сигнал может обеспечить третий радиус, указывающий на местоположение приемника глобальной системы определения местоположения (GPS), поскольку все три радиуса должны пересечься в одной точке. Разворачивая концепцию отказа от трехмерной трилатерации, каждый спутниковый сигнал может быть использован для указания сферы, посредством чего три пересекающихся сферы могут быть использованы для определения местоположения, которое включает в себя информацию о высоте. Для увеличения точности может быть использовано, а также типично используется, большее количество спутниковых сигналов.
В приемнике глобальной системы определения местоположения (GPS) спутниковый сигнал, после сравнения и синхронизации с псевдослучайным шумовым кодом, - демодулируется. Приемник глобальной системы определения местоположения (GPS) использует навигационное сообщение глобальной системы определения местоположения (GPS) для вычисления времени прохождения спутникового сигнала в дополнение к координатам спутника глобальной системы определения местоположения (GPS). Определение местоположения посредством приемника глобальной системы определения местоположения (GPS) обычно достигается в пределах 15 метров (50 футов). Однако точность этих вычислений зависит от точности результата измерения и спутниковой конфигурации. Атмосферные условия могут вызвать задержки сигналов в ионосфере. Кроме того, факторы неопределенности в спутниковых орбитах могут способствовать ошибкам, аксиоматически, со временем спутниковые орбиты ухудшаются. Степень использования индикации местоположения с использованием данных глобальной системы определения местоположения (GPS) может быть дополнительно проблематичной ввиду концепций общественной безопасности в современной среде.
Чтобы обращаться к проблемам доступности сигналов, связанных с глобальной системой определения местоположения (GPS), в конце 1990-ых была введена серверная глобальная система определения местоположения (GPS). Стационарные серверы обеспечиваются с стационарным приемником глобальной системы определения местоположения (GPS) для приема спутниковых сигналов глобальной системы определения местоположения (GPS). Стационарные приемники глобальной системы определения местоположения (GPS) связаны с антенной, имеющей полный небесный обзор, для предоставления возможности непрерывного мониторинга сигналов со всех находящихся в зоне видимости спутников глобальной системы определения местоположения (GPS). Для предоставления возможности связи с мобильными станциями глобальной системы определения местоположения (GPS) каждому серверу обеспечивается радиоинтерфейс. При запросе о местоположении мобильного модуля глобальной системы определения местоположения (GPS), сервер передает его спутниковую информацию глобальной системы определения местоположения (GPS), полученную с его стационарного приемника глобальной системы определения местоположения (GPS), на мобильный модуль глобальной системы определения местоположения (GPS). Эта информация включает в себя список находящихся в поле видимости спутников глобальной системы определения местоположения (GPS) и данные, которые предоставляют мобильному приемнику глобальной системы определения местоположения (GPS) возможность синхронизации и сравнения псевдослучайных шумовых кодов с подобными кодами спутников глобальной системы определения местоположения (GPS). Мобильный приемник глобальной системы определения местоположения (GPS) передает его собранные данные глобальной системы определения местоположения (GPS) на сервер. В свою очередь, сервер вычисляет местоположение мобильного приемника глобальной системы определения местоположения (GPS) из данных, предоставленных посредством мобильной GPS и стационарной GPS. Несмотря на то, что эта схема допускает большую точность при использовании безсерверной глобальной системы определения местоположения (GPS), доступность спутниковых сигналов все еще может иметь проблемы при получении точного местоположения.
Система для сигналов повышенного уровня (ESS) использует схему определения местоположения, которая является независимой от глобальной системы определения местоположения (GPS). Трехмерная информация, охватывающая ландшафт, включающий в себя здания, строения и другие препятствия, собирается для моделирования характеристик распространения радиочастотного сигнала для радиопередающей антенны в интересующей географической области. Результаты моделирования сохраняются в базе данных. Местоположение мобильного устройства обнаружения определяется применительно к устройству обнаружения, измеряющему уровень сигналов с множества радиопередатчиков. Местоположение вычисляется посредством системы с использованием входящей информации с мобильного устройства обнаружения и сохраненной в базе данных информации. Эта система использовалась в Японии применительно к системе персональных мобильных телефонов (PHS).
Другие схемы для определения местоположения, не использующие глобальную систему обнаружения местоположения (GPS), используют или угол прибытия (AOA) поступающих сигналов в приемники или разность во времени прибытия (TDOA) поступающих сигналов в приемники.
Схема, использующая угол прибытия поступающих сигналов, основанная на сети связи, определяет местоположение мобильной станции (например, мобильного телефона, «карманного» компьютера, выполненного с возможностью радиосвязи, портативного компьютера, выполненного с возможностью радиосвязи, пейджера или другого персонального устройства связи) посредством определения угла, на котором сигнал прибывает на два или более неподвижных участков антенны. Например, направление сигнала или угол прибытия поступающего сигнала на каждом участке могут быть определены с помощью разности во времени прибытия поступающих сигналов на различные элементы одной неподвижной антенны на том участке. Например, два элемента фазированной антенной решетки могут быть использованы для охвата углов между 60° и -60°. Шесть элементов фазированной антенной решетки, которые эквивалентны трем антеннам с двумя парами элементов, могут охватывать 360°. Для определения местоположения мобильной станции, находящееся в сети связи оборудование комбинирует угловые данные с множества участков. Надлежащее угловое измерение и геометрические отношения между мобильной станцией и неподвижными антеннами могут затрагивать определение местоположения. Пространственная близость мобильной станции к центральной точке, находящейся между двумя неподвижными антеннами, может привести к существенной ошибке определения местоположения. Поэтому желательно использовать три или более участков антенны при выполнении измерений АОА.
Схема определения местоположения с использованием разности во времени прибытия является другим решением, основанным на сети связи, которое измеряет разность во времени прибытия радиосигнала, по меньшей мере, для двух участков антенны. При использовании скорости электромагнитной волны и известного времени приема и передачи может быть определено расстояние между неподвижной антенной и мобильной станцией. Обработанная информация переводится в широту и долготу (данные о местоположении). Точность синхронизированной информации о синхронизации, необходимой для надлежащего вычисления TDOA, является важной для надлежащего определения местоположения. Синхронизированная точная синхронизация иногда может быть проблематичной при измерении TDOA. Вследствие этого может пострадать определение местоположения с использованием TDOA. Всего лишь одна микросекунда ошибки при синхронизации может привести к ошибке в несколько метров при определении местоположения.
Трилатерация прямой линии связи также может быть использована для определения местоположения, посредством чего разность во времени прибытия сигнала с антенны базовой станции на мобильную станцию может быть вычислена посредством вычисления разности фаз между сигналами, закодированными с помощью псевдослучайных шумовых кодов, передающимися, по меньшей мере, с двух антенн на мобильную станцию. Эта схема особенно полезна для систем множественного доступа с кодовым разделением каналов (CDMA). Расширенная трилатерация прямой линии связи (AFLT) является разновидностью этой схемы, где мобильная станция и базовая станция меняются ролями. При расширенной трилатерации прямой линии связи (AFLT) местоположение мобильной станции является фиксированным применительно к базовым станциям, принимающим передачи от мобильной станции. При расширенной трилатерации прямой линии связи (AFLT) мобильная станция измеряет фазовые сдвиги CDMA фазовых шумов различных пилот-сигналов и сообщает о них находящемуся в сети связи модулю определения местоположения. Модуль определения местоположения использует измерения фаз различных пилот-сигналов для выполнения трилатерации прямой линии связи для определения местоположения для модуля оповещения.
Метод идентификации обеспечивает другой подход к определению местоположения мобильной станции. Характеристики радиочастотных сигналов, связанные с различными областями в зоне передачи сигнала, собираются в базе данных. Каждая группа характеристик сигналов для зоны известна как «идентификационная метка». Местоположение мобильной станции определяется посредством сравнения собранных посредством мобильной станции выборки данных радиочастотных сигналов для идентификации данных в базе данных. Сравнение может быть выполнено в мобильной станции или на сервере, поддерживающем идентификацию данных. Идентификационные данные собираются преимущественно из набора многолучевых сигналов, которые проходят через косвенные пути прохождения сигнала с передатчика на приемник. Несмотря на то, что не существует предметов для многих из проблем, связанных с другими технологиями идентификации местоположения, метод идентификации требует выполнения значительного объема работы, заключающейся в сборе данных, и поэтому, экономически подходит только для плотно заселенных, сильно сконцентрированных столичных зон.
Таким образом, как было описано выше, многочисленные отдельные схемы определения местоположения являются известными в уровне техники. Эти схемы могут быть широко классифицированы на режимы «ассистирования мобильной станцией» (режим MS-Assisted) и режимы «с основой в мобильной станции» / «автономный» (режимы MS-Based/Standalone). В режиме «ассистирования мобильной станцией» (MS-Assisted) местоположение мобильной станции определяется с помощью компьютера, обычно называемого модулем определения местоположения (PDE), который соединен с сетью связи. Модуль определения местоположения (PDE) может использовать один из вышеупомянутых способов, например, TDOA, AOA, ESS и т.д. В режиме «с основой в мобильной станции»/«автономный» (MS-Based/Standalone) мобильная станция вычисляет собственное местоположение, используя свой процессор и доступные в ней данные. Одним примером системы «с основой в мобильной станции»/«автономная» (MS-Based/Standalone) является система, в которой мобильная станция оснащена возможностью приема и обработки GPS-сигналов, а также определяющая собственное местоположение на основании принятых мобильной станцией GPS-сигналов. Отдельная схема определения местоположения зависит от различных элементов/ресурсов, которые восприимчивы к различным типам ошибок. Например, сетевое подключение, независимо от выбранной схемы (GPS, GPS+, AFLT и т.д.), необходимо во всех способах «ассистирования мобильной станцией» (MS-Assisted) GPS. Даже если результаты измерения GPS идеальны, способ «ассистирования мобильной станцией» (MS-Assisted) может потерпеть неудачу при сбое сетевого подключения. Поэтому в данном случае способ «Автономный» (Stand-alone) GPS обеспечил бы лучший результат определения местоположения.
Каждая из вышеупомянутых схем определения местоположения может быть неточной или недоступной при вышеупомянутых случаях. Таким образом, мобильная станция или сеть связи, используя любую из этих известных схем определения местоположения, могут быть не в состоянии получить какой-либо результат при запросе определения текущего местоположения мобильной станции или же могут получить неточный результат. Поэтому существует потребность в создании способа для более надежного определения местоположения мобильной станции с большей вероятностью.
Сущность изобретения
Один раскрытый аспект предоставляет способ определения местоположения мобильного устройства. Согласно данному аспекту способ включает в себя этап определения местоположения мобильной станции с использованием первой схемы определения местоположения и, в случае, если первая схема не приводит к приемлемому результату определения местоположения - этап повтора определения местоположения с использованием, по меньшей мере, одной дополнительной схемы определения местоположения, отличающейся от первой схемы, по меньшей мере, несколькими повторами до (i) получения приемлемого результата определения местоположения или (ii) до использовании всех доступных схем определения местоположения. Различные используемые в способе схемы могут использовать результаты измерения уровней различных сигналов или различные результаты измерения характеристик сигналов в качестве основы для результата определения местоположения. Маловероятно, что все эти различные схемы будут не в состоянии возвратить приемлемый результат определения местоположения, в связи с этим надежность системы повышается. В действительности способ выбирает схему определения местоположения, которая предоставляет приемлемые результаты при преобладающих условиях. Система переключает схемы динамически, как этого требуют условия.
Дополнительный аспект предоставляет способ определения местоположения мобильной станции, включающий в себя этап выполнения определения местоположения для мобильной станции, согласно множеству различных схем, и этап определения оценки ошибки для каждой схемы определения местоположения. Согласно данному аспекту способ может дополнительно включать в себя этап выбора одного способа определения местоположения, имеющего наименьшую оценку ошибки, а также этап выбора в качестве местоположения мобильной станции результата определения местоположения, предоставленного посредством выбранного способа определения местоположения. Фактически этот способ выбирает схему определения местоположения, которая предоставляет наилучшие доступные результаты при преобладающих условиях, для того, чтобы система динамически переключала схемы при столкновении с изменяющимися условиями. Альтернативно, согласно данному аспекту способ может включать в себя этап вычисления местоположения упомянутой мобильной станции посредством комбинирования множества результатов определения местоположения как, например, посредством вычисления взвешенного среднего значения результатов определения местоположения.
Дополнительный аспект предоставляет мобильное устройство и системы для определения местоположения мобильного устройства.
Краткое описание чертежей
Фиг.1 - функциональная блок-схема одного варианта осуществления системы.
Фиг.2 - блок-схема, изображающая способ выполнения определения местоположения.
Фиг.3 - блок-схема, изображающая способ выполнения определения местоположения.
Фиг.4 - блок-схема, изображающая способ выполнения определения местоположения.
Фиг.5 иллюстрирует блок-схему взаимодействия мобильной станции 2 с сетью 14 связи.
Подробное описание
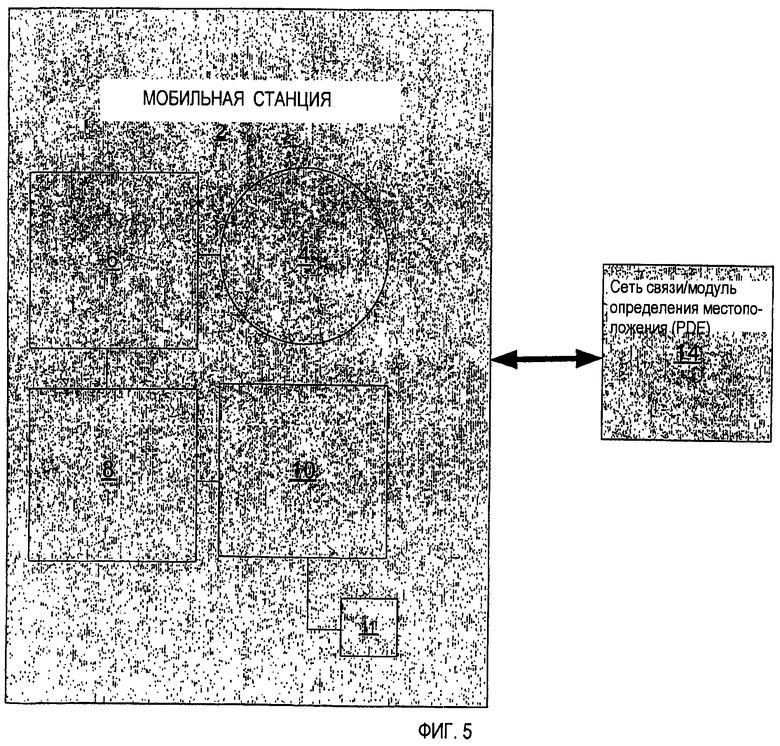
Фиг.1 иллюстрирует, в виде функциональной блок-схемы, систему, включающую в себя мобильную станцию 2, сеть 20 связи, а также связанный модуль 14 определения местоположения (PDE).
Мобильная станция 2 включает в себя процессор 6, память 8 и приемопередатчик 10 (передатчик/приемник). Используемый в настоящем документе термин «приемопередатчик» относится к любой совокупности компонентов, которые выполняют функции приема и передачи. Таким образом, приемопередатчик 10 может включать в себя обычные компоненты, используемые в обеих функциях, или совершенно отдельные компоненты для выполнения функций приема и передачи. Приемопередатчик 10 выполнен с возможностью приема и передачи сигналов, предназначенных для передачи информации по сети 20 связи.
Приемопередатчик связан с процессором 6 так, чтобы процессор мог управлять операциями приемопередатчика и так, чтобы процессор мог отправлять данные по сети 20 связи и принимать данные из сети связи через приемопередатчик. Мобильная станция 2 обычно также включает в себя компоненты (не показаны) для пользовательской связи и контроля за работой пользователей. Например, если мобильная станция является сотовым телефоном, то она будет включать в себя обычный микрофон и динамик, соединенные с приемопередатчиком под управлением процессора, а также обычную клавишную панель и устройство отображения (не показаны) для ввода и представления данных. В конкретном изображенном варианте осуществления приемопередатчик 10 выполнен с возможностью приема GPS-сигналов, а процессор 6 выполнен с возможностью получения результата определения местоположения на основании GPS-сигналов, используя сохраненное в памяти 8 программное обеспечение. Процессор 6 также выполнен с возможностью определения параметра, связанного с ожидаемой ошибкой в результате определения местоположения как, например, количество спутниковых сигналов, принятых и используемых в достижении такого результата.
Сеть 20 связи включает в себя множество базовых станций, например, вышки сотовой связи 22, 24, 26 и 28, находящихся в разнообразных местоположениях. Каждая базовая станция включает в себя оборудование 30 для мониторинга характеристик сигналов или широковещательной передачи сигналов с предварительно выбранными характеристиками, как требуется, по меньшей мере, в одной схеме определения местоположения. Например, базовые станции могут быть выполнены с возможностью функционирования в схеме определения угла прибытия, при условии, что оборудование 30 каждой базовой станции включает в себя фазированную антенную решетку и схему, выполненную с возможностью измерения разности во времени прибытия на различные элементы.
Дополнительно или в качестве альтернативы, базовые станции могут быть выполнены с возможностью функционирования в схеме мониторинга времени прибытия, при условии, что оборудование 30 каждой базовой станции включает в себя обычные устройства для мониторинга времени прибытия сигнала на станцию, используя общесетевой главный тактовый генератор или локальный тактовый генератор, синхронизированный с таким общесетевым главным тактовым генератором, для того, чтобы время прибытия, определенное на каждой станции, могло быть сравнено со временем прибытия, определенным на каждой другой станции.
Оборудование 30 каждой базовой станции также может включать в себя оборудование для измерения параметров сигнала, связанных с пригодностью сигналов для использования в схеме определения местоположения. Например, оборудование 30, используемое в схеме определения времени прибытия или угла прибытия, может включать в себя оборудование для измерения мощности принятых сигналов.
Модуль 14 определения местоположения (PDE) включает в себя один или несколько вычислительных процессоров 36, связанных с базовыми станциями 22, 24, 26, 28, и память 38, связанную с этими процессорами. Память 36 содержит программное обеспечение, которое инструктирует процессор 36 о выполнении функций, требуемых для получения результата определения местоположения для каждого отдельной схемы определения местоположения, реализованной на сетевых компонентах. Например, если сеть связи реализовывает схему времени прибытия, память может содержать данные, представляющие физические местоположения базовых станций, и команды для вычисления результатов определения местоположения, приводящие к обычному способу, основанному на разности во времени прибытия на различные базовые станции и местоположениях базовых станций.
Как будет дополнительно объяснено ниже со ссылкой на Фиг.2-4, процессор 36 модуля определения местоположения (PDE) также выполняет функции определения местоположения на основании выбора одного результата определения местоположения, определенного посредством одной схемы определения местоположения из множества результатов, полученных при использовании различных схем, или на основании комбинации такого множества результатов. Элемент процессора, который выполняет эти функции, называемый в настоящем документе «контроллером», показан в качестве отдельного функционального элемента под ссылочным номером 40.
Эта часть процессора может включать в себя те же самые физические структуры в качестве используемых для других функций или же может включать в себя отдельные физические структуры. Контроллер функционирует согласно командам и данным, сохраненным в памяти 38. Кроме того, процессор 36 и память 38 могут быть физически рассредоточены. Например, память 38 может быть связана с процессором через сеть 20 связи или через другую общедоступную или частную сеть связи (не показана) как, например, через сеть Интернет. Элементы процессора также могут быть физически рассредоточены и связаны любым подходящим способом.
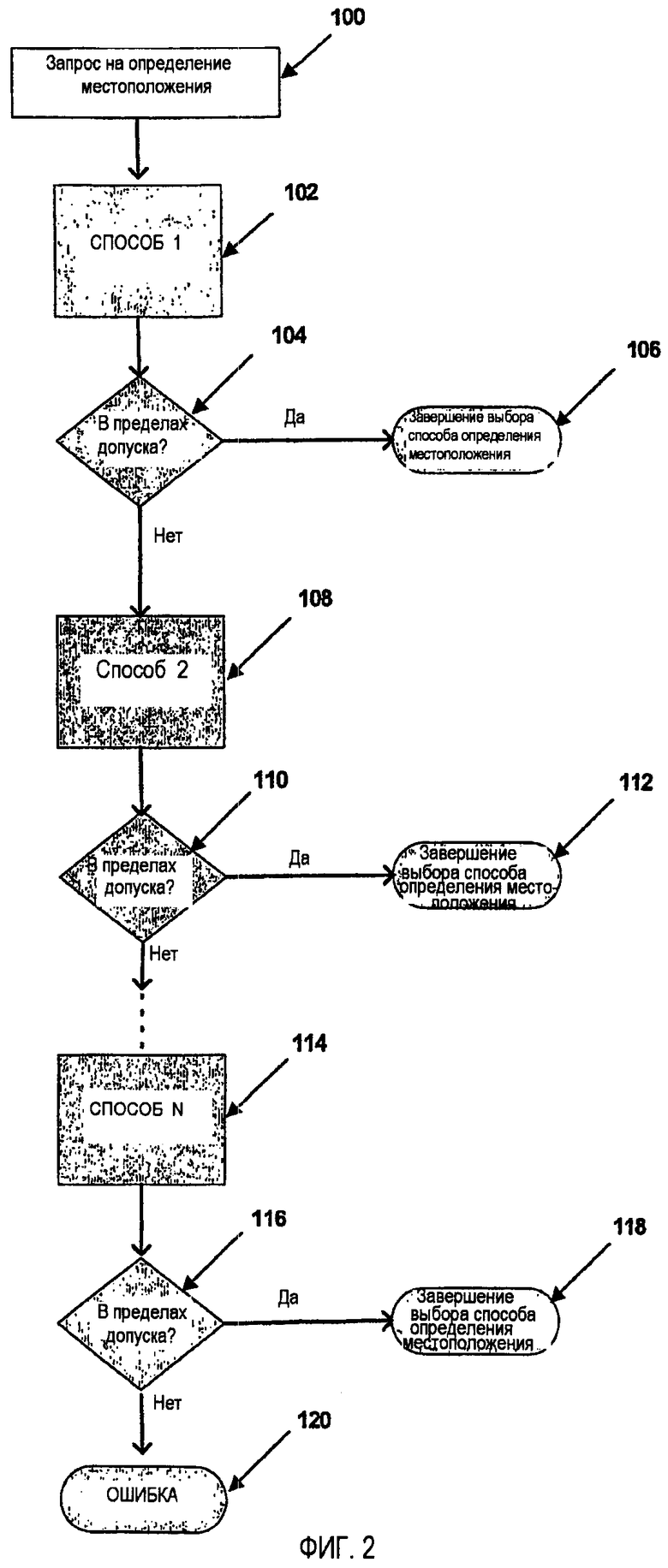
Фиг.2 иллюстрирует блок-схему, изображающую способ выполнения определения местоположения с использованием системы, как обсуждалось выше со ссылкой на Фиг.1. Способ начинается (этап 100), когда модуль 14 определения местоположения (PDE) принимает запрос на определение местоположения мобильной станции 2. Такой запрос может быть введен в качестве команды пользователя на мобильной станции или же может быть инициирован посредством другого источника. Например, если система является системой сотового телефона, связанной с пунктом реагирования общественной безопасности (PSAP), запрос может исходить из пункта реагирования общественной безопасности (PSAP) или же может быть автоматически инициирован всякий раз, когда мобильная станция соединяется с пунктом реагирования общественной безопасности (PSAP) как, например, если пользователь мобильной станции набирает «911», находясь в Соединенных Штатах Америки.
Модуль обнаружения местоположения (PDE) посылает команду базовым станциям, мобильной станции или же обеим для сбора данных и получения результата определения местоположения, согласно первой схеме определения местоположения (этап 102). Результат определения местоположения получают посредством первой схемы, а затем проверяют на приемлемость (этап 104), согласно одному или нескольким предопределенным критериям. Например, если первая схема является обычной схемой определения местоположения GPS, то модуль определения местоположения (PDE) может отдать команду процессору 6 мобильной станции 2 для осуществления попытки получить информацию о местоположении мобильной станции на основании принятых мобильной станцией GPS-сигналов, и для передачи полученного результата определения местоположения модулю 14 определения местоположения (PDE) через сеть 20 связи наряду с данными, указывающими на качество результата, например данные, указывающие на количество спутниковых сигналов, принятых и используемых при получении результата.
Модуль определения местоположения (PDE) может применить приемлемый критерий на основании количества спутниковых сигналов, используемых при получении результата. Например, критерий может определить, что результат, полученный при использовании четырех или более спутниковых сигналов, является приемлемым, тогда как результат определения местоположения, полученный при использовании трех спутниковых сигналов, является неприемлемым, а также, что результат определения местоположения, указывающий на то, что местоположение не было определено, также является неприемлемым.
В другом сценарии пользователь может заблудиться и может определить собственное местоположение посредством вызова определения местоположения, где процессор 6 использует способ «с основой в мобильной станции»/«Автономный» (MS-Based/Standalone) глобальной системы определения местоположения (GPS). Однако, из-за отсутствия или слабого GPS-сигнала способ «с основой в мобильной станции»/«Автономный» (MS-Based/Standalone) может потерпеть неудачу. Мобильная станция 2 может предписать процессору 6 использовать способ, который использует результаты измерения AFLT в дополнение к результатам измерения GPS, то есть режим «ассистирования мобильной станцией» (MS-Assisted), для повышения вероятности получения данных определения местоположения.
Дополнительно или в альтернативе, прямая оценка ошибки может быть включена в результат определения местоположения. Например, результат определения местоположения может быть выражен в терминах широты и долготы вместе с индикацией точности или оценкой ошибки плюс или минус количество футов или метров. В случае с результатом глобальной системы определения местоположения (GPS), использующим больше спутниковых сигналов, чем минимум, требуемый для получения результата определения местоположения, процессор мобильного модуля или модуля определения местоположения (PDE) может получить оценку ошибки посредством сравнения результатов определения местоположения, полученных из различных подмножеств доступных спутниковых сигналов.
Критерии приемлемости могут включать в себя приемлемый допуск, равный ±75 футам, в этом случае получаемый результат, сопровождаемый посредством оценки ошибки, равной ±50 футов, будет считаться приемлемым, так она находится в пределах допуска ±75 футов, тогда как результат определения местоположения, сопровождаемый посредством оценки ошибки, равной ±75 футов, будет считаться недопустимым.
Еще одним критерием, который может быть применен, является сравнение с предварительно-определенным местоположением мобильной станции. Память 38 может содержать статистические данные о местоположении, представляющие предварительно-определенное местоположение мобильного модуля 2 и время такого предварительного определения. Приемлемые критерии могут включать в себя критерии из условия, чтобы результат определения местоположения, отличающийся от предварительно-определенного местоположения, был больше порогового предела на единицу времени, начиная с последнего определения, расцененного как недопустимое.
Например, если результат определения местоположения, полученный посредством схемы глобальной системы определения местоположения (GPS) показывает, что наземная мобильная станция находится в местоположении, удаленном на 10 миль от местоположения, определенного 2 секунды назад - такой результат можно считать недопустимым. В варианте этого подхода, взятые в совокупности результаты определения местоположения могут быть усреднены для вычисления скользящего среднего значения или же сравнены друг с другом для установления средней скорости мобильной станции.
Любые из предшествующих и других критериев могут быть применены на этапе 104.
Если результат определения местоположения, полученный посредством первой схемы, является приемлемым, то модуль 14 определения местоположения (PDE) выбирает этот результат в качестве информации о местоположении (координаты) мобильной станции (этап 106). Принятый модулем определения местоположения (PDE) результат передается на мобильную станцию, на пункт реагирования общественной безопасности (PSAP) или любому другому соответствующему адресату, в качестве информации о местоположении, определенной посредством способа, после чего способ завершается. Определенное местоположение может быть выражено в виде широты и долготы или преобразовано в уличный адрес или в местоположение на картографической координатной сетке или в любой другой подходящий вид.
Однако, если результат определения местоположения, полученный посредством первой схемы, является неприемлемым, то процесс выполнения способа переходит на этап 108. На этом этапе модуль 14 определения местоположения (PDE) отдает базовым станциям и/или мобильному модулю команду выполнения второй схемы определения местоположения, отличной от первой схемы определения местоположения.
Например, если первая схема определения местоположения использовала GPS, то вторая схема определения местоположения схема может использовать разность во времени прибытия. Время прибытия сигналов на различные базовые станции 22, 24, 26, 28 определяется и передается на модуль 14 определения местоположения (PDE), который вычисляет результат определения местоположения на основании этой разности во времени. Информация, переданная модулю 14 определения местоположения (PDE) или собранная в модуле 14 определения местоположения (PDE), может включать в себя данные об измерении уровней сигналов, используемые для получения результата определения местоположения, например, количества базовых станций, принимающих сигнал, мощность сигналов, принятых различными базовыми станциями и т.п., а также может произвольно включать в себя прямую оценку ошибки в результате определения местоположения. Контроллер сравнивает результат определения местоположения с приемлемыми критериями и определяет, является ли полученный посредством второй схемы результат определения местоположения приемлемым (этап 110).
Примененные на данном этапе критерии могут включать в себя несколько или же все вышеупомянутые критерии, обсуждаемые со ссылкой на этап 104, или же могут включать в себя их разновидности. Например, в схеме разности во времени прибытия приемлемые критерии могут включать в себя требование для приема сигнала с определенным минимальным уровнем сигнала, по меньшей мере, тремя базовыми станциями. Если результат определения местоположения, полученный посредством второй схемы определения местоположения, является приемлемым, то контроллер 40 выбирает этот результат определения местоположения в качестве результата определения местоположения посредством способа, и передает его (этап 112) тем же самым способом, как обсуждалось выше со ссылкой на этап 106.
Если результат определения местоположения, полученный посредством второй схемы, является неприемлемым, то процесс продолжает использовать дополнительные повторы этапа получения результата определения местоположения с использованием различных дополнительных схем для получения результатов определения местоположения (этап 114), и дополнительные определения приемлемости (этап 116) до тех пор, пока приемлемый результат местоположения не будет найден и передан (этап 118) тем же самым способом, как обсуждалось выше, или же до тех пор, пока все из n возможных схем определения местоположения, использующих включенное в систему оборудование, не будет использовано. Если n-ая схема выполнена без возврата приемлемого результата определения местоположения, то контроллер 40 выдает сообщение об ошибке (этап 120), а затем процесс выполнения способа завершается.
Порядок, в котором способ использует различные схемы, в этом варианте может быть откорректирован на основании достигнутых результатов. Если найденная конкретная схема предоставит приемлемые результаты в последовательности вышеупомянутых этапов, то она может быть помещена в начало порядка использования. Таким образом, если модуль 14 определения местоположения (PDE) принял другой запрос на определение местоположения, а последовательность вышеупомянутых этапов снова была инициирована, то эта схема будет использоваться на первом этапе определения местоположения. Вероятно, что такая схема предоставит приемлемые результаты. При использовании предварительно-успешной схемы, такой как первая схема, система минимизирует количество обращений при поиске среди множества схем, которое она должна выполнить для обнаружения приемлемой схемы.
В этом варианте способ может быть начат заново (возвратиться на этап 102) дополнительно или вместо выдачи сообщения об ошибке. В дополнительном варианте, когда все n способов были использованы без обнаружения приемлемого результата определения местоположения, система может выбрать лучший результат определения местоположения из числа доступных результатов. Например, если все результаты определения местоположения сопровождаются данными, представляющими оценку ошибки, то система может выбрать результат определения местоположения, связанный с наименьшей оценкой ошибки и передать этот результат.
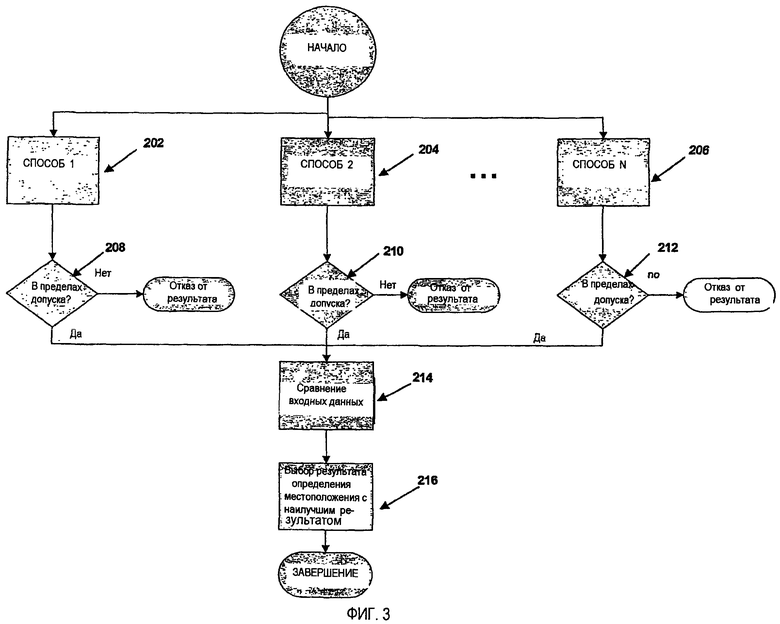
В способе, согласно другому варианту осуществления, контроллер 40 параллельно приводит в действие компоненты системы для выполнения всех N схем определения местоположения и выбирает один результат определения местоположения из числа полученных результатов определения местоположения. Фиг.3 иллюстрирует блок-схему, изображающую этот способ.
Этапы определения местоположения согласно n схемам выполняются параллельно (этапы 202, 204, 206). Каждый результат определения местоположения проверяется на предварительно выбранные критерии приемлемости, как обсуждалось выше, (этапы 208, 210, 212), а от неприемлемых результатов отказываются. Приемлемые результаты сравниваются (этап 214), а затем лучший результат выбирается согласно предопределенной оценке преимущества (этап 216). Например, если результаты сопровождаются оценкой ошибки, то выбирается результат, связанный с самой низкой предполагаемой ошибкой.
Альтернативно, контроллер может назначить оценку ошибки или другой показатель качества каждому результату на основании известных или предполагаемых отношений между условиями, связанными с таким результатом и точностью результата. Например, контроллер может назначить более благоприятный показатель качества (например, низкую оценку ошибки) результату, полученному из угла прибытия четырьмя базовыми станциями, и менее благоприятный показатель качества (например, высокую оценку ошибки) для результата угла прибытия на основании сигналов, принятых тремя базовыми станциями. Выбранный результат определения местоположения передается в качестве результата определения местоположения, определенного посредством способа (этап 220).
В варианте этого способа опущен этап определения приемлемости каждого результата и отказа от неприемлемых результатов (этапы 208-212), и все результаты передаются на этап сравнения с оценками ошибки или другими показателями качества.
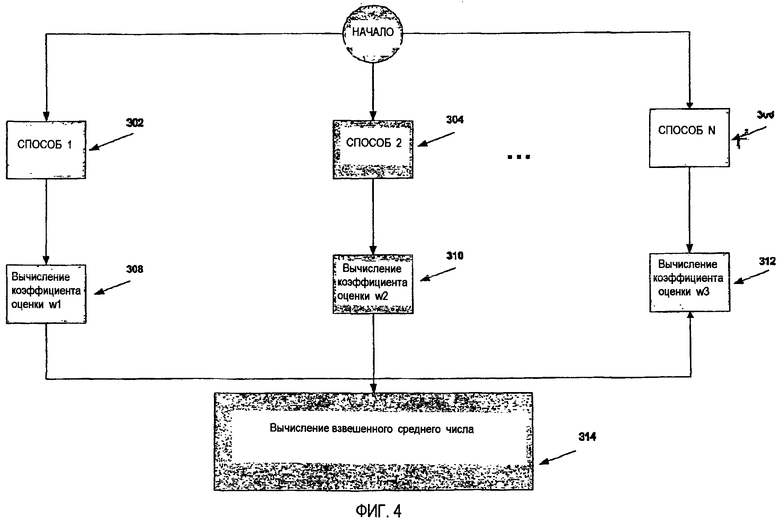
В способе, согласно другому варианту осуществления (Фиг.4), множество результатов определения местоположения получают с использованием различных схем определения местоположения (этапы 302-306), а оценка ошибки или другой показатель качества определяется для каждого результата вышеупомянутым способом (этапы 308-312). Каждый результат определения местоположения считается случайной переменной с установленной степенью достоверности, воплощенной в оценке ошибки (оценке точности) или другом показателе качества. Различные результаты объединяются (этап 314) друг с другом для достижения комбинированного результата, используя алгоритм объединения, который дает различные степени значимости различным отдельным результатам, согласно этой степени достоверности.
В одном таком алгоритме объединения среднее число, оцененное согласно уровню достоверности, вычисляется для установления случайных переменных. Например, если посредством n различных схем было получено n (n - целое число) показателей, то w1, w2..., wn представляют собой коэффициенты оценки, приписанные каждому результату определения местоположения, а x1, x2,..., xn представляют собой результат определения местоположения, взвешенное среднее число может быть выражено следующим образом: w1x1+w2x2+w3x3/(w1+w2+w3).
Для предоставления большей оценки определению местоположения с высокой индикацией точности, (и наоборот, для предоставления меньшей оценки измерениям с наименьшей степенью достоверности) обратные величины индикаций точности могут быть использованы в качестве как коэффициентов оценки при вычислении взвешенного среднего числа. Следовательно, если x1 имеет точность, равную ±5 футов, x2 имеет точность, равную ±50 футов, а x3 имеет точность, равную ±10 футов, соответственно коэффициенты оценки w1, w2 и w3 должны иметь значения 0,2, 0,02 и 0,1. Показателю x1 предоставляют самую большую оценку среди показателей x2 и x3. Коэффициенты оценки могут быть вычислены с использованием других способов. Например, для коэффициентов оценки может быть использован квадрат обратной величины индикации точности.
Еще в одном варианте осуществления вышеописанный способ определения местоположения может быть осуществлен посредством мобильной станции и/или посредством сети связи/модуля определения местоположения (PDE) («Network/PDE») совместно с мобильной станцией.
Фиг.5 иллюстрирует блок-схему взаимодействия мобильной станции 2 с сетью связи/модулем 14 определения местоположения (PDE) («Network/PDE»). Мобильная станция 2 включает в себя мультиплексор 4 режима определения местоположения, процессор 6, память 8, приемопередатчик 10 (передатчик/приемник) и устройство 11 отображения. В одном аспекте мобильная станция 2 предпринимает попытку определить собственное местоположение в пределах предварительно указанного допуска с использованием способа «Network/PDE», как предписано процессором 6. Если результат определения местоположения не достигает предварительно указанного допуска, то мультиплексор 4 динамически переключает режимы для получения результата определения местоположения подходящей точности с использованием другого способа определения местоположения.
Режим определения местоположения, выбранный посредством переключателя 4, может использовать способ, основанный на мобильной станции 2, то есть, режим «С основой в мобильной станции»/«Автономный» («MS-Based/Standalone») (например, GPS) или способ, основанный на режиме «ассистирования мобильной станцией» («MS-Assisted»), используя приемопередатчик 10 для связи с сетью связи/модулем 14 определения местоположения (PDE). Двойная стрелка 12 показывает взаимодействие сети связи/ модуля 14 определения местоположения (PDE) («Network/PDE») с мобильной станцией 2 для режима работы «ассистирования мобильной станцией» («MS-Assisted»). Что касается результата определения местоположения, определяемого для мобильной станции 2, в одном варианте осуществления изобретения его можно показать на устройстве 11 отображения мобильной станции 2. Альтернативно, результат определения местоположения может быть передан и/или определен в сети связи/модуле 14 определения местоположения (PDE) (Network/PDE).
Память 8 может содержать хронологические данные о местоположении. Процессор 6 запрограммирован для управления функционированием мультиплексора 4. Что касается хранения предыдущих показателей местоположения мобильной станции в памяти 8, то изменение текущих показателей местоположения выше порогового предела за предопределенный период времени может указать на существенную ошибку при определении местоположения. Процессор 6 может предоставить ответ, требующий определения местоположения мобильной станции посредством другого способа. Например, перемещение мобильной станции на 10 миль за 2 секунды является вероятно ошибочным определением, особенно если мобильная станция 2 является наземной станцией. Альтернативно, память 8 может позволить одновременно совместно взятым результатам определения местоположения быть совместно усредненными для вычисления скользящего среднего значения. Несмотря на то, что это обеспечивает эффект сглаживания касательно изменений в местоположении в течение долгого времени, этот способ может ввести некоторую ошибку. Для некоторых применений определения местоположения эта ошибка может являться приемлемой.
Определение местоположения мобильной станции может быть достигнуто посредством выбора различных способов, причем каждый способ содержит одну или несколько схем. Например, способ MS-Assisted GPS может содержать GPS или GPS, объединенную с AFLT. Способ на основе сети связи может содержать TDCOA или AOA или же их комбинацию, в то время как способ MS-Based/Standalone GPS может использовать, например, только GPS.
Традиционные попытки выполнения определения местоположения мобильной станции полностью терпят неудачу, если по некоторым причинам определенный способ определения местоположения терпит неудачу. Определение местоположения мобильной станции, согласно изобретению, допускает способы, которые содержат различные схемы определения местоположения, отличные от, или в дополнение к определенной схеме, которая по некоторым причинам может быть не в состоянии определить местоположение мобильной станции.
Таким образом, доступность успешной схемы определения местоположения улучшает использование изобретения по сравнению с обычными способами. Кроме того, изобретение допускает использование различных средств для определения местоположения, используя ту же самую схему, которая иначе привела бы к неудаче в использовании другого ресурса.
Несмотря на то, что в настоящем документе изобретение было описано со ссылкой на определенные варианты осуществления, должно быть понятно, что эти варианты осуществления являются только иллюстративными определенными принципами и применениями. Например, конкретные схемы определения местоположения, упомянутые со ссылкой на Фиг. 1-4, являются только лишь иллюстративными; может быть использована любая из множества известных отдельных схем определения местоположения. Например, могут быть использованы схемы трилатерации, в которых используется время прибытия сигналов с множества базовых станций. По желанию, различные схемы определения местоположения полностью или частично основываются на различных физических измерениях характеристик сигнала, различных сигналах или же на их комбинации. Кроме того, функции, выполняемые посредством модуля 36 определения местоположения (PDE) и контроллером 40 в вышеописанных примерах, могут быть выполнены полностью или частично посредством элементов мобильной станции 2. Как заявлено иначе, процессор 6 мобильной станции может включать в себя функциональные элементы, которые выполняют функции контроллера 40. Кроме того, способ определения местоположения может быть выполнен для одновременного или последовательного определения местоположения множества мобильных станций. Описанные в настоящем документе способы, по существу, могут быть реализованы в любой сети связи, например, не только в системах множественного доступа с кодовым разделением каналов (CDMA), а также и в системах множественного доступа с временным разделением каналов (TDMA), в системах множественного доступа с частотным разделением каналов (FDMA) или же в системах множественного доступа с пространственным разделением каналов (SDMA). Поэтому должно быть понятно, что в иллюстративных вариантах осуществления может быть сделано множество изменений, и что могут быть изобретены другие схемы расположения, не отступая от сущности и объема настоящего изобретения, как определено посредством приложенной формулы изобретения.
Изобретение относится к технике связи. Технический результат заключается в повышении надежности определения местоположения мобильной станции с желаемой точностью. Технический результат достигается за счет использования множества схем определения местоположения с последующим выбором приемлемого результата. Схемы переключаются динамически, как этого требуют условия. 10 н. и 26 з.п. ф-лы, 5 ил.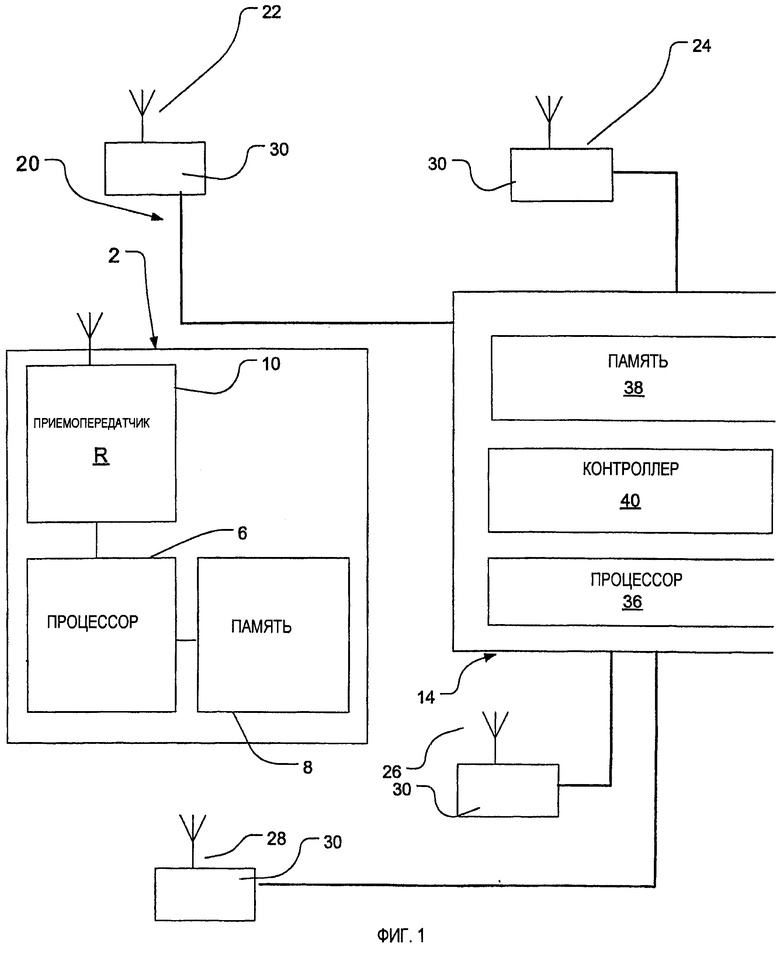
1. Способ получения информации о местоположении мобильной станции, содержащий этапы, на которых:
(a) определяют местоположение мобильной станции с использованием первой схемы определения местоположения;
(b) если определение не приводит к приемлемому результату определения местоположения, повторяют упомянутый этап определения с использованием, по меньшей мере, одной дополнительной схемы определения местоположения, отличной от упомянутой первой схемы, по меньшей мере, несколькими повторами до (i) получения приемлемого результата определения местоположения или (ii) до использования всех доступных схем определения местоположения; и
(c) переупорядочивают порядок, в котором первая схема определения местоположения и, по меньшей мере, одна дополнительная схема определения местоположения предпринимаются, на основании результата от каждой из схем определения местоположения.
2. Способ по п.1, в котором упомянутая мобильная станция является мобильным устройством связи, выбранным из группы, состоящей из мобильного телефона, «карманного» компьютера с возможностью беспроводной связи, портативного компьютера с возможностью беспроводной связи, пейджера и других персональных устройств связи.
3. Способ по п.1, в котором упомянутые схемы определения местоположения выбирают из группы, состоящей из GPS, трилатерации, серверной GPS, повышенного уровня сигнала, угла прибытия, разности во времени прибытия, трилатерации прямой линии связи, расширенной трилатерации прямой линии связи, метода идентификации и их комбинаций.
4. Способ по п.1, в котором, по меньшей мере, одна из упомянутых схем определения местоположения является автономной схемой, основанной на мобильной станции.
5. Способ по п.4, в котором, по меньшей мере, одна из упомянутых схем определения местоположения является схемой, основанной на ассистировании мобильной станцией.
6. Способ по п.1, в котором, по меньшей мере, одна из упомянутых схем определения местоположения является схемой, основанной на ассистировании мобильной станцией.
7. Способ по п.1, дополнительно содержащий этап, на котором определяют, привело ли каждое упомянутое определение к приемлемому результату определения местоположения.
8. Способ по п.7, дополнительно содержащий этап, на котором получают оценку ошибки, связанную с каждым результатом определения местоположения, причем упомянутый этап определения того, привело ли каждое определение к приемлемому результату определения местоположения, включает в себя этап, на котором сравнивают оценку ошибки, связанную с таким результатом определения местоположения с предопределенным допуском.
9. Способ по п.8, в котором упомянутый предопределенный допуск равен ±50 футов.
10. Способ по п.8, в котором, по меньшей мере, одна упомянутая схема включает в себя мониторинг характеристик сигналов, передающихся между упомянутой мобильной станцией и множеством базовых станций, а также упомянутый этап получения оценки ошибки включает в себя этап определения количества базовых станций, включенных в упомянутый мониторинг.
11. Способ определения местоположения мобильной станции, содержащий этапы, на которых:
определяют местоположение для упомянутой мобильной станции согласно множеству различных схем определения местоположения и определяют оценку ошибки для каждой схемы определения местоположения;
выбирают одну упомянутую схему определения местоположения, имеющую наименьшую оценку ошибки, и выбирают в качестве результата определения местоположения мобильной станции результат местоположения, предоставленный посредством выбранной схемы определения местоположения; и
переупорядочивают порядок, в котором множество различных схем определения местоположения предпринимается, на основании определенных оценок ошибки от каждой из схем определения местоположения.
12. Способ по п.11, в котором упомянутая мобильная станция является мобильным устройством связи, выбранным из группы, состоящей из мобильного телефона, «карманного» компьютера с возможностью беспроводной связи, портативного компьютера с возможностью беспроводной связи, пейджера и других персональных устройств связи.
13. Способ по п.11, в котором упомянутую схему выбирают из группы, состоящей из трилатерации GPS, серверной GPS, повышенного уровня сигнала, угла прибытия, разности во времени прибытия, трилатерации прямой линии связи, расширенной трилатерации прямой линии связи, метода идентификации и их комбинаций.
14. Способ по п.11, в котором, по меньшей мере, одна из упомянутых схем является автономной схемой, основанной на мобильной станции.
15. Способ по п.14, в котором, по меньшей мере, одна из упомянутых схем является схемой, основанной на ассистировании мобильной станцией.
16. Способ по п.11, в котором, по меньшей мере, одна из упомянутых схем является схемой, основанной на ассистировании мобильной станцией.
17. Способ по п.11, дополнительно содержащий этап, на котором определяют, привело ли каждое упомянутое определение к приемлемому результату определения местоположения, причем упомянутый этап выбора включает в себя этап, на котором выбирают только между приемлемыми результатами определения местоположения.
18. Способ по п.11, в котором, по меньшей мере, одна из упомянутых схем определения местоположения включает в себя мониторинг характеристик сигналов, передающихся между упомянутой мобильной станцией и множеством базовых станций, а упомянутый этап выбора включает в себя этап, на котором определяют количество базовых станций, включенных в упомянутый мониторинг.
19. Способ определения местоположения мобильной станции, содержащий этапы, на которых:
определяют местоположение для упомянутой мобильной станции согласно n различным схемам, причем n представляет собой целое число, обеспечивая таким образом множество различных результатов определения местоположения;
вычисляют местоположение упомянутой мобильной станции посредством объединения множества упомянутых результатов определения местоположения и
переупорядочивают порядок, в котором предпринимаются п различных схем, на основании множества различных результатов определения местоположения.
20. Способ по п.19, дополнительно содержащий этап, на котором получают оценку ошибки для каждого упомянутого результата определения местоположения, причем упомянутый этап вычисления включает в себя этап, на котором объединяют упомянутое множество результатов определения местоположения, основываясь, по меньшей мере, частично на упомянутых оценках ошибки.
21. Способ по п.20, в котором упомянутый этап объединения включает в себя этап, на котором вычисляют взвешенное среднее число результатов определения местоположения с использованием коэффициента оценки на основании упомянутых оценок ошибки.
22. Способ по п.20, в котором упомянутые коэффициенты ошибки являются обратными величинами оценок ошибок.
23. Способ по п.22, в котором упомянутые коэффициенты ошибки являются квадратами обратных величин оценок ошибок.
24. Система для определения местоположения мобильной станции, содержащая:
мобильную станцию;
сеть связи, выполненную с возможностью связи с упомянутой мобильной станцией посредством радиосигналов;
модуль определения местоположения, находящийся на связи или с упомянутой сетью связи, или с упомянутой мобильной станцией, или же с ними обеими, причем упомянутые мобильная станция, сеть и модуль определения местоположения функционируют для получения результата определения местоположения, представляющего местоположение упомянутой мобильной станции, посредством множества доступных схем определения местоположения; и
контроллер, находящийся на связи с упомянутым модулем определения местоположения, причем упомянутый контроллер выполнен с возможностью: приведения в действие упомянутого модуля определения местоположения, сети связи и мобильной станции для получения результата определения местоположения согласно первой схеме, представляющей местоположение мобильной станции, для определения того, является ли результат определения местоположения согласно первой схеме приемлемым, и в противном случае - для приведения в действие упомянутого модуля определения местоположения, сети связи и мобильной станции для получения результата определения местоположения согласно, по меньшей мере, одной дополнительной схеме, отличной от упомянутой первой схемы, до тех пор, пока все доступные схемы определения местоположения не будут использованы, или же до тех пор, пока не будет получен приемлемый результат определения местоположения, причем контроллер переупорядочивает порядок, в котором предпринимаются первая схема определения местоположения и, по меньшей мере, одна дополнительная схема определения местоположения, на основании результата от каждой из схем определения местоположения.
25. Система для определения местоположения мобильной станции, содержащая:
мобильную станцию;
сеть связи, выполненную с возможностью связи с упомянутой мобильной станцией посредством радиосигналов;
модуль определения местоположения, находящийся на связи или с упомянутой сетью связи, или с упомянутой мобильной станцией, или же с ними обеими, причем упомянутая мобильная станция, сеть связи и модуль определения местоположения выполнены с возможностью получения результата определения местоположения, представляющего местоположение упомянутой мобильной станции, посредством множества доступных схем определения местоположения; и
контроллер, находящийся на связи с упомянутым модулем определения местоположения, причем упомянутый контроллер выполнен с возможностью приведения в действие упомянутого модуля определения местоположения, сети связи и мобильной станции для получения результатов определения местоположения, представляющих местоположение мобильной станции согласно более чем одной из упомянутых схем, и выбора одного из упомянутых результатов определения местоположения, причем контроллер переупорядочивает порядок, в котором предпринимаются схемы определения местоположения, на основании результата от каждой из схем определения местоположения.
26. Система для определения местоположения мобильной станции, содержащая:
мобильную станцию;
сеть связи, выполненную с возможностью связи с упомянутой мобильной станцией посредством радиосигналов;
модуль определения местоположения, находящийся на связи или с упомянутой сетью связи, или с упомянутой мобильной станцией, или же с ними обеими, причем упомянутая мобильная станция, сеть связи и модуль определения местоположения выполнены с возможностью получения результата определения местоположения, представляющего местоположение упомянутой мобильной станции, посредством множества доступных схем определения местоположения; и
контроллер, находящийся на связи с упомянутым модулем определения местоположения, причем упомянутый контроллер выполнен с возможностью приведения в действие упомянутого модуля определения местоположения, сети связи и мобильной станции для получения результатов определения местоположения, представляющих местоположение мобильной станции, согласно более чем одной из упомянутых схем и для вычисления местоположения упомянутой мобильной станции посредством объединения упомянутых результатов, причем контроллер переупорядочивает порядок, в котором предпринимается множество доступных схем определения местоположения, на основании результата от каждой из схем определения местоположения.
27. Система по п.26, в которой упомянутая сеть связи выполнена с возможностью связи с упомянутой мобильной станцией через способ, выбранный из группы схем доступа к радиоканалу, состоящей из схем множественного доступа с кодовым разделением каналов (CDMA), схем множественного доступа с временным разделением каналов (TDMA), схем множественного доступа с частотным разделением каналов (FDMA), схем множественного доступа с пространственным разделением каналов (SDMA) и их комбинаций.
28. Система по п.26, в которой упомянутые схемы выбирают из группы, состоящей из трилатерации GPS, серверной GPS, повышенного уровня сигнала, угла прибытия, разности во времени прибытия, трилатерации прямой линии связи, расширенной трилатерации прямой линии связи, метода идентификации и их комбинаций.
29. Система по п.26, в которой упомянутая мобильная станция является мобильным устройством связи, выбранным из группы, состоящей из мобильного телефона, «карманного» компьютера с возможностью беспроводной связи, портативного компьютера с возможностью беспроводной связи, пейджера и других персональных устройств связи.
30. Мобильная станция, содержащая:
мультиплексор режима определения местоположения для выбора способа определения местоположения для определения местоположения упомянутой мобильной станции, причем упомянутый мультиплексор режима определения местоположения выполнен с возможностью выбора между способами определения местоположения «автономная мобильная станция» и «ассистирование сетевой мобильной станцией», причем мультиплексор режима определения местоположения переупорядочивает порядок, в котором способы определения местоположения выбираются на основании результатов способов определения местоположения;
передатчик и приемник для обеспечения связи через доступ к радиоканалу с упомянутой сетью связи и
процессор для управления упомянутым мультиплексором.
31. Мобильная станция по п.30, в которой упомянутый доступ к радиоканалу обеспечивается с помощью способа, выбираемого из группы схем доступа к радиоканалу, состоящих из схем множественного доступа с кодовым разделением каналов (CDMA), схем множественного доступа с временным разделением каналов (TDMA), схем множественного доступа с частотным разделением каналов (FDMA), схем множественного доступа с пространственным разделением каналов (SDMA) и их комбинаций.
32. Мобильная станция по п.30, в которой упомянутые способы выбирают из группы способов, состоящих из трилатерации GPS, серверной GPS, повышенного уровня сигнала, угла прибытия, разности во времени прибытия, трилатерации прямой линии связи, расширенной трилатерации прямой линии связи, метода идентификации и их комбинаций.
33. Мобильная станция по п.30, в которой упомянутая мобильная станция является мобильным устройством связи, выбранным из группы, состоящей из мобильного телефона, «карманного» компьютера с возможностью беспроводной связи, портативного компьютера с возможностью беспроводной связи, пейджера и других персональных устройств связи.
34. Машиночитаемый носитель, включающий в себя сохраненный на нем программный код, причем машиночитаемый носитель содержит:
программный код для определения местоположения мобильной станции с использованием первой схемы определения местоположения;
программный код для повторения определения, если программный код для определения не приводит к приемлемому результату, с использованием, по меньшей мере, одной дополнительной схемы определения местоположения, отличной от упомянутой первой схемы, по меньшей мере, несколькими повторами до (i) получения приемлемого результата определения местоположения или (ii) до использования всех доступных схем определения местоположения; и
программный код для переупорядочивания порядка, в котором первая схема определения местоположения и, по меньшей мере, одна дополнительная схема определения местоположения предпринимаются, на основании результата от каждой из схем определения местоположения.
35. Машиночитаемый носитель, включающий в себя сохраненный на нем программный код, причем машиночитаемый носитель содержит:
программный код для определения местоположения упомянутой мобильной станции согласно множеству различных схем определения местоположения и для определения оценки ошибки для каждой схемы определения местоположения;
программный код для выбора одной упомянутой схемы определения местоположения, имеющей наименьшую оценку ошибки, и для выбора в качестве результата определения местоположения мобильной станции результат местоположения, предоставленный посредством выбранной схемы определения местоположения; и
программный код для переупорядочивания порядка, в котором множество различных схем определения местоположения предпринимается, на основании определенных оценок ошибки от каждой из схем определения местоположения.
36. Машиночитаемый носитель, включающий в себя сохраненный на нем программный код, причем машиночитаемый носитель содержит:
программный код для определения местоположения для упомянутой мобильной станции согласно n различным схемам, причем n представляет собой целое число, обеспечивая таким образом множество различных результатов определения местоположения;
программный код для вычисления местоположения упомянутой мобильной станции посредством объединения множества упомянутых результатов определения местоположения и
программный код для переупорядочивания порядка, в котором предпринимаются n различных схем, на основании множества различных результатов определения местоположения.
| EP 1251362, 23.10.2002 | |||
| WO 03089954 A1, 30.10.2003 | |||
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2000 |
|
RU2178894C1 |
| US 5999126 A, 07.12.1999. | |||

