Область техники, к которой относится изобретение
Изобретение относится к способу контроля рельсовых тормозов подвижного состава в соответствии с ограничительной частью п.1 формулы.
Уровень техники
Такой способ известен из DE 10155143 А1.
Современный подвижной состав дополнительно к пневматической тормозной системе обычно оборудован магнитным рельсовым тормозом, который выполнен в виде вихревого или электромагнитного тормоза.
На магистральных железных дорогах принята «высокая подвеска», в которой тормозной магнит удерживается пружинами над рельсами на заданной высоте около 100 мм. Для процесса торможения усилия пружин преодолеваются посредством исполнительных пневмоцилиндров, и тормозные магниты опускаются на рельс из высокого положения в рабочее положение. Одновременно тормоз электрически включается (см. Wolfgang Hendrichs “Das statische, dynamische und thermische Verhalten von Magnetschienenbremsen”, Elektrische Bahnen eb, 86. Jahrgang, Heft 7/1988, стр.224-228).
В тяговом подвижном составе может быть предусмотрена также комбинация высокой и низкой подвесок. Магниты подвешены тогда на нажимных цилиндрах или пневморессорах, которые посредством сжатого воздуха отжимаются в высокое положение к расположенному на тележке центрирующему упору. При срабатывании тормоза происходит продувка нажимных цилиндров или пневморессор, причем магниты опускаются в положение готовности. В пригородном подвижном составе, например в трамваях, принята низкая подвеска. Обычно у магнитного рельсового тормоза в положении торможения тормозной магнит находится во фрикционном контакте с рельсом.
У так называемого линейного вихревого тормоза тормозной магнит, напротив, даже в положении торможения удерживается на расстоянии от рельса, причем электромагнитные катушки намагничивают полюсные сердечники, так что при включенном вихревом тормозе при его движении относительно рельса из-за изменений по времени магнитного потока в ходовом рельсе индуцируются вихревые токи, которые вырабатывают вторичное магнитное поле, встречное магнитному полю вихревого тормоза. Из этого следует действующая навстречу направлению движения горизонтальная тормозная сила. Однако для этого необходима магнитная связь между рельсом и тормозным магнитом, которая существенно зависит от воздушного зазора между тормозным магнитом и рельсом.
Таким образом, у обоих видов магнитных тормозов эффективность тормоза существенно зависит от правильного расстояния между тормозным магнитом и рельсом.
Поэтому в DE 10155143 А1 предложено диагностическое контрольное устройство для контроля расстояния между тормозным магнитом и ходовым рельсом, в котором используются несколько датчиков расстояния, измеряющих воздушный зазор между магнитным тормозом и верхней стороной рельса. За счет этого у обоих видов магнитных тормозов можно непрерывно контролировать, имеет ли тормозной магнит правильное расстояние до рельса в ходовом и тормозном положениях.
Однако датчики требуются дополнительных затрат, и существует опасность того, что в случае их выхода из строя или ошибочной функции нельзя будет обнаружить неисправности или будут вырабатываться неверные сигналы неисправности.
Также в DE 10009331 С2 предложено использование датчиков, которые измеряют расстояние магнитного тормоза от верхней кромки рельса и в зависимости от измерительного сигнала управляют управляющим/регулирующим устройством, устанавливающим с помощью актуаторов расстояние между магнитным тормозом и верхней кромкой рельса.
Раскрытие изобретения
Задачей изобретения является усовершенствование способа описанного выше типа для контроля рельсовых тормозов таким образом, чтобы без использования датчиков расстояния можно было контролировать безупречную функцию рельсового тормоза.
Эта задача решается посредством признаков, приведенных в п.1 формулы. Предпочтительные варианты осуществления и модификации изобретения приведены в зависимых пунктах формулы.
Изобретение основано на той основной идее, что вызванные изменениями магнитного контура изменения тока позволяют сделать однозначный вывод о принятом состоянии системы рельсовый тормоз/рельс.
Магнитная связь между тормозным магнитом и рельсом образует магнитный контур и у магнитного рельсового тормоза зависит от расстояния между тормозным магнитом и рельсом. Поэтому магнитная связь оказывает непосредственное обратное действие на ток возбуждения, протекающий через обмотку тормозного магнита. Если во время опускания магнитного рельсового тормоза ток возбуждения включен, то происходит значительное изменение тока возбуждения, как только возникнет магнитная связь.
Поэтому, согласно изобретению, предложено измерять электрический ток через обмотку тормозного магнита и сравнивать временную характеристику измеренного тока с хранящейся в памяти временной характеристикой эталонного тока. На основе этого получают сигнал, указывающий, возникла ли магнитная связь между тормозным магнитом и рельсом, что равнозначно эффективности или готовности рельсового тормоза к работе.
Аналогичным образом это относится также к магнитным вихревым тормозам, у которых временная характеристика тока возбуждения зависит от магнитной связи между тормозным магнитом и рельсом.
В результате сравнения ожидаемой характеристики тока (эталонного тока) с измеренной характеристикой тока обнаруживается изменение магнитной связи между тормозным магнитом и рельсом.
Поэтому не требуется ни дополнительных датчиков, ни применявшегося прежде визуального контроля. Измерение тока возбуждения не требует никаких дополнительных датчиков, и лишь одного измерительного резистора в блоке управления. Оценка временной характеристики тока возбуждения и сравнение с ожидаемой характеристикой тока могут осуществляться микропроцессором в блоке управления торможением. Таким образом, можно констатировать готовность рельсового тормоза к работе или эффективность его торможения.
Краткое описание изобретения
Ниже изобретение более подробно поясняется на примерах его осуществления со ссылкой на чертежи, на которых изображают:
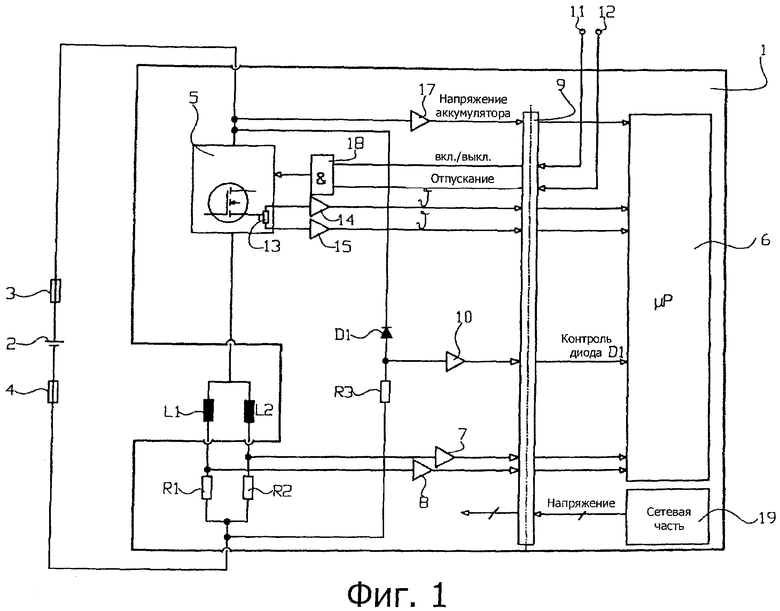
- фиг.1: принципиальную схему блока управления магнитным рельсовым тормозом;
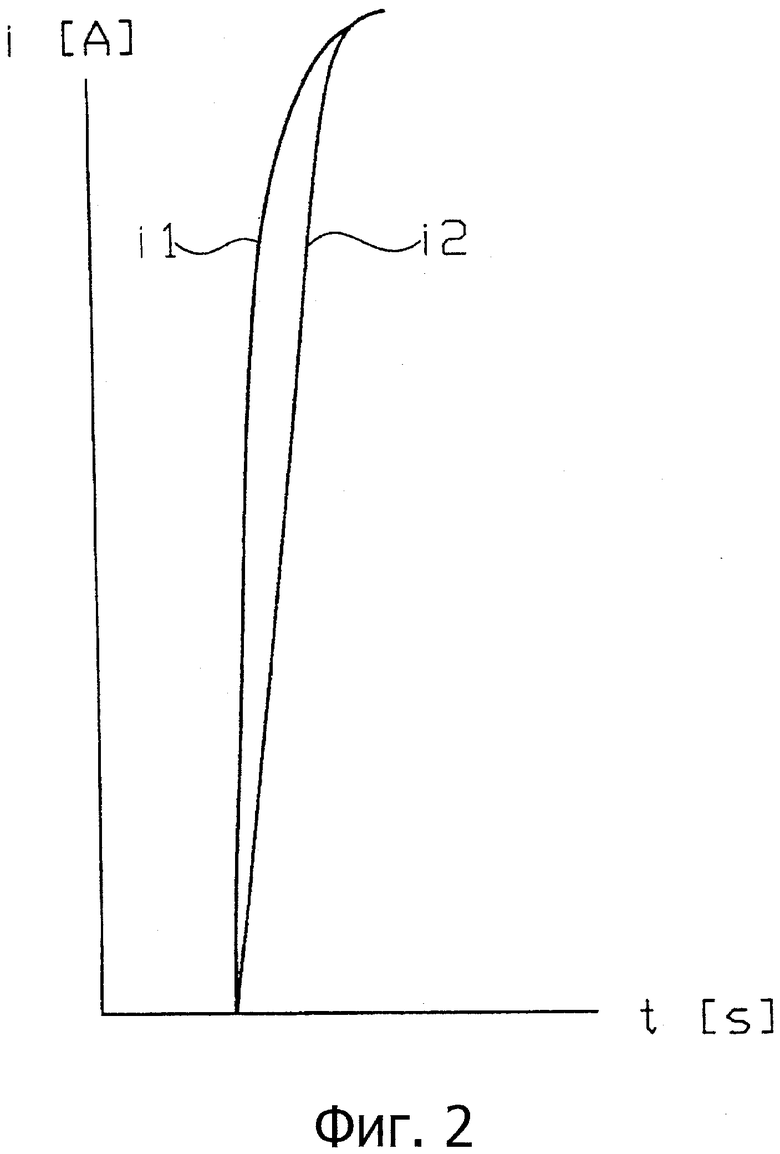
- фиг.2: измерительную диаграмму временной характеристики тока возбуждения для случаев эффективной и неэффективной магнитной связи между тормозным магнитом и рельсом;
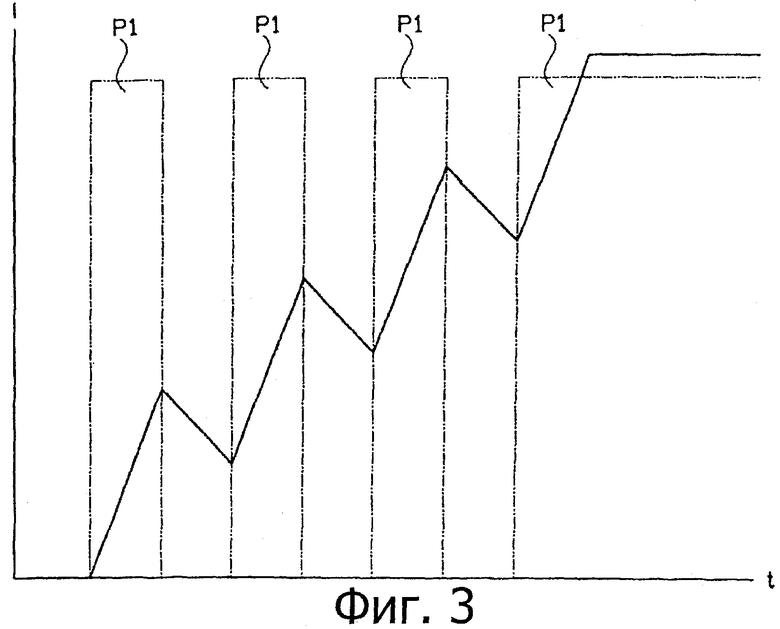
- фиг.3: диаграмму временной характеристики тока возбуждения при его тактовом включении;
- фиг.4: измерительную диаграмму временной характеристики тока возбуждения с изменением и без изменения магнитной связи между тормозным магнитом и рельсом.
На фиг.1 изображен блок управления 1 тормозными магнитами, представленными на схеме в виде индуктивностей L1, L2.
Осуществление изобретения
Блок управления 1 питается электроэнергией от бортовой сети, например аккумулятора 2, которая защищена на его обоих полюсах предохранителями 3,4.
Обе индуктивности L1, L2 включены в одной цепи тока с силовым выключателем 5, управляемым от микропроцессора 6 и соединяющим индуктивности L1, L2 с напряжением аккумулятора 2. Обе индуктивности L1, L2 включены последовательно с шунтирующими резисторами R1, R2, падение напряжения на которых пропорционально протекающему через индуктивности L1, L2 току. Это напряжение снимается с общей точки соединения между индуктивностями L1, L2 и шунтирующими резисторами R1, R2 и передается через измерительные усилители 7, 8 на микропроцессор 6. Последний посредством гальванической развязки 9 отделен от силовой части схемы.
Силовой выключатель 5 содержит температурный датчик 13, который измеряет температуру силового выключателя 5 и через измерительные усилители 14, 15 посылает на микропроцессор 6 сообщение о гальванической развязке 9.
Параллельно последовательной схеме из силового выключателя 5, индуктивностей L1, L2 и шунтирующих резисторов R1, R2 включены безинерционный диод D1, которому придан шунтирующий резистор R3, и измерительный усилитель 10, который через гальваническую развязку 9 передает на микропроцессор 6 сигнал контроля диода.
Один полюс силового выключателя 5, соединенный с напряжением аккумулятора (обычно плюсовой полюс), через дополнительный измерительный усилитель 17 и гальваническую развязку 9 соединен с микропроцессором 6. По этому пути можно измерять и контролировать напряжение аккумулятора.
Силовой выключатель 5 коммутируется двумя сигналами, а именно отпирающим сигналом и коммутирующим сигналом (вкл./выкл.) для включения и выключения силового выключателя 5. Оба сигнала могут подаваться блоку управления 1 через внешние выводы 11, 12, а именно целесообразно также через гальваническую развязку 9, причем, разумеется, возможна также подача этих сигналов микропроцессору 6, который на своих выходах через гальваническую развязку направляет их дальше. Оба этих сигнала связываются между собой в вентиле «И» 18 и управляют силовым выключателем 5 и, тем самым, включением и выключением индуктивностей L1, L2 для тормозных магнитов.
На гальванически отделенной от силовой части (в частности, силового выключателя 5) стороне помимо микропроцессора 6 находится еще сетевая часть 19, которая обеспечивает отрегулированное электропитание для измерительных усилителей и для управления силовым выключателем 5. Также электропитание названных элементов гальванически отделено от сетевой части 19.
Ток через индуктивности L1, L2 непрерывно измеряется шунтирующими резисторами R1, R2 и передается на микропроцессор 6.
Контроль безинерционного диода D1 осуществляется измерительным усилителем 10, который выполнен в виде компаратора и измеряет ток через безинерционный диод D1 в виде падения напряжения на шунтирующем резисторе R3. Таким образом, измерительный усилитель 10 посылает на микропроцессор 6 цифровой сигнал.
Температура силового выключателя 5 контролируется температурным датчиком 13 и в виде аналогового сигнала передается измерительными усилителями 14, 15 на микропроцессор 6. Точно так же напряжение аккумулятора контролируется измерительным усилителем 17 ив виде аналогового сигнала передается на микропроцессор 6. Все сигналы от силовой части и к ней, а также все ее питающие напряжения гальванически отделены от управляющей части (микропроцессор 6 и сетевая часть 19).
Температура тормозных магнитов косвенно контролируется посредством тока через индуктивности L1, L2 в установившемся состоянии. Омическое сопротивление индуктивностей L1, L2 заметно изменяется с температурой, так что при известных в остальном параметрах в установившемся состоянии при постоянном токе более 0 и временной производной di/dt=0 ток позволяет сделать вывод о температуре тормозных магнитов, что учитывается при оценке.
На фиг.2 изображена диаграмма протекающего через индуктивности (тормозной магнит) L1, L2 тока i в зависимости от времени t. Характеристика i1 показывает случай, когда тормозной магнит имеет контакт с рельсом, а характеристика i2 - случай, когда тормозной магнит не имеет контакта с рельсом. Обе кривые i1, i2 заметно отличаются по скорости нарастания тока. Согласно основной идее изобретения, скорости нарастания тока обрабатываются. Только за счет измерения тока посредством шунтирующих резисторов R1, R2 (фиг.1) это позволяет определить, имеет ли тормозной магнит контакт с рельсом.
Согласно одному варианту осуществления изобретения, временная характеристика нарастания тока с контактом тормозного магнита с рельсом в соответствии с кривой i2 на фиг.2 хранится в микропроцессоре 6 в качестве «эталонного тока». Согласно первому варианту осуществления изобретения, эта кривая i2 эталонного тока может определяться индивидуально для отдельного рельсового тормоза. Согласно другому варианту осуществления изобретения, можно также определить кривую i2 эталонного тока чисто расчетным путем или теоретически и произвести согласование с данным типом рельсового тормоза или с индивидуальным рельсовым тормозом за счет подходящих нормирующих коэффициентов или за счет выбора поясняемых ниже пороговых значений.
Микропроцессор 6 непрерывно образует разность между измеренной характеристикой тока, передаваемой через шунтирующие резисторы R1, R2 и измерительные усилители 7, 8, и характеристикой значения эталонного тока и интегрирует разность по времени. Если этот интеграл разности характеристик тока превышает заданное пороговое значение, то микропроцессор 6 сообщает об отсутствии контакта между тормозным магнитом и рельсом отсутствует. Если же интеграл ниже порогового значения, то микропроцессор 6 сообщает о наличии контакта и, тем самым, о том, что рельсовый тормоз готов к работе. Напротив, можно также отнести кривую i2 эталонного тока к неустановленному рельсовому тормозу и в противоположность описанному выше случаю работать с инверсной логикой.
Преимущественно названный интеграл разности обрабатывается только в заданном интервале времени, который короче продолжительности, в течение которой ток через индуктивности L1, L2 достигает значения своего полного насыщения или номинального значения.
Согласно одной модификации изобретения, чисто схематично изображенной на фиг.3, процесс включения разделен на несколько включающих импульсов Р1-Р4, т.е. силовой выключатель 5 на фиг.1 срабатывает тактами. Таким образом, происходит последовательно нарастание и падение тока, пока на фазе Р4 не будет достигнут полный номинальный ток. Описанная выше оценка скоростей нарастания тока осуществляется на каждой из фаз Р1-Р4 заново, причем эта оценка может осуществляться в интервал времени, который короче фаз P1, P2 или РЗ. Преимущественно оценка осуществляется в начале соответствующей фазы.
На фиг.4 изображены характеристики тока через индуктивности LI, L2 в зависимости от времени. Кривая i3 показывает характеристику тока включения без изменения состояния магнитной связи между тормозным магнитом и рельсом. В зависимости от того, существует ли магнитная связь или нет, крутизна в соответствии с кривыми i1, i2 на фиг.2 разная. Если в процессе включения происходит изменение состояния магнитной связи между тормозным магнитом и рельсом, то характеристика тока (кривая i4) показывает заметное изменение за счет образования локальных экстремальных значений е min и е max. В момент t1, в который устанавливается магнитная связь, в эквивалентной схеме на фиг.1 значение индуктивностей L1, L2 изменяется, в результате чего ток достигает локального максимума е max, затем на короткое время уменьшается, а после достижения локального минимума е min в момент t2 снова нарастает, причем в этом случае немного медленнее. Оценка существенных изменений, в частности локальных экстремальных значений е min и е max тока i4, позволяет, тем самым, констатировать изменение состояния магнитной связи. Если, например, как показано на фиг.4, ток возбуждения i4 включен уже на фазе механического опускания тормозного магнита в направлении рельса, то при уменьшении воздушного зазора между тормозным магнитом и рельсом, начиная с определенного расстояния, возникает магнитная связь и измеряется характеристика тока (кривая i4) на фиг.4.
Согласно одной модификации изобретения, оценка в соответствии с описанными этапами способа происходит каждый раз по новой после возникновения локального минимума е min. Следовательно, начиная с этого момента, скорость нарастания тока оценивается заново путем интегрирования по времени разности между хранящейся в памяти заданной кривой (эталонный ток) и измеренной фактической кривой, причем также в этом случае оценка может осуществляться в заданном временном окне. Таким образом, сравниваются только положительные скорости нарастания тока.
Приведенное выше пороговое значение интеграла может быть установлено в зависимости от типа рельсового тормоза.
Поскольку на практике измеренные характеристики тока наложены на паразитные сигналы, согласно одной модификации изобретения, сигнал измеренной характеристики тока фильтруется, а именно преимущественно фильтром нижних частот, предельная частота которого зависит от типа рельсового тормоза. Предельная частота составляет порядка менее 50 Гц.
Повышение надежности обнаружения локальных экстремальных значений достигается за счет того, что разность интеграла локальных экстремальных значений тока соответствует, по меньшей мере, 30% разности интеграла хранящегося в памяти эталонного тока, причем оба интеграла определяются соответственно в один и тот же промежуток времени.
Для обнаружения магнитной связи между тормозным магнитом и рельсом можно также определить временной промежуток t2-t1 между локальными экстремальными значениями и сравнить с локальными экстремальными значениями стандартного сигнала. Следовательно, оценивается временная разность t2-t1, в пределах которой характеристика тока проходит от локального максимума е max до локального минимума е min. При этом оцениваются преимущественно только такие характеристики тока, у которых разность delta е между локальными максимумом е и минимумом е min превышает заданное предельное значение.
Также в этом случае можно определить интеграл разности между измеренной характеристикой тока и хранящейся в памяти характеристикой эталонного тока.
Также может быть образован интеграл разности между характеристикой фактического тока и такой характеристикой эталонного тока, которая образуется, начиная с момента первого экстремального значения е max на фиг.4, за счет экстраполированного участка кривой до достижения номинального тока i nenn. Также в этом случае можно опять определить пороговое значение, которое зависит от типа рельсового тормоза. Только при превышении этого порогового значения принимается магнитная связь между тормозным магнитом и рельсом. Также эта оценка с помощью экстраполированного участка кривой может быть ограничена временным окном, причем также в этом случае нельзя превышать зависимого от типа рельсового тормоза порогового значения.
Другим критерием может быть то, что ток в локальном минимуме е min в пределах временного окна t2-x до t2+x ниже среднего значения тока в этом временном окне. Продолжительность х зависит от типа рельсового тормоза и составляет порядка менее 1 секунды.
Другой критерий можно определить следующим образом. Непрерывно образуется разность delta i между измеренным током i4 и эталонным током i3, что показано на фиг.4 кривой delta i. Из характеристики delta i определяется момент t3 максимума delta i, и контролируется, лежит ли он в пределах временного окна t2-x до t2+x. Если да, то это также является критерием того, что возникла магнитная связь между тормозным магнитом и рельсом. Из измерительной диаграммы на фиг.4 видно, что максимальное значение разности max(delta i) может лежать также за пределами интервала времени t1-t2, поэтому целесообразно, чтобы названное временное окно лежало с обеих сторон от t2. Вместо разности может определяться и оцениваться также интеграл разности и его максимальное значение.
Наконец погрешности вследствие колебаний напряжения аккумулятора, изменения температуры магнитных катушек рельсового тормоза и/или температуры силового выключателя 5 можно устранить за счет нормирования хранящейся в памяти заданной кривой эталонного тока по отношению к напряжению аккумулятора, температуре магнитных катушек рельсового тормоза и/или температуре силового выключателя 5. Напряжение аккумулятора и температура силового выключателя 5 регистрируются на фиг.1 посредством измерительного усилителя 17 для напряжения аккумулятора и измерительных усилителей 14, 15 для температуры силового выключателя 5. Температура магнитных катушек рельсовых тормозов определяется косвенным образом, как уже пояснялось выше, за счет измерения установившегося тока через индуктивности L1, L2. Установившийся ток определяется за счет того, что ток больше 0, а временная производная тока di/dt равна нулю.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МАГНИТОРЕЛЬСОВЫМ ТОРМОЗНЫМ УСТРОЙСТВОМ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627920C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭЛЕКТРОМАГНИТНЫХ ПАРАМЕТРОВ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2016 |
|
RU2623834C1 |
| СВЕРХПРОВОДЯЩИЙ ПРЕОБРАЗОВАТЕЛЬ ТОКА | 1980 |
|
SU908224A1 |
| УПРАВЛЯЕМЫЙ РАСЦЕПИТЕЛЬ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2017 |
|
RU2752849C2 |
| КОММУТАЦИОННЫЙ АППАРАТ СРЕДНЕГО НАПРЯЖЕНИЯ И УПРАВЛЯЮЩИЙ БЛОК ДЛЯ КОММУТАЦИОННОГО АППАРАТА СРЕДНЕГО НАПРЯЖЕНИЯ | 2020 |
|
RU2816793C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ЕГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2533382C2 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 2018 |
|
RU2692409C1 |
| СПОСОБ РАСЧЕТА ТОКА ВОЗБУЖДЕНИЯ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА | 2004 |
|
RU2384435C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ТРАНСФОРМАТОРА | 2013 |
|
RU2650695C2 |
| Способ дифференциальной релейной защиты, предназначенный в том числе и для переходных режимов, сопровождающихся насыщением измерительных трансформаторов тока (варианты) | 2024 |
|
RU2824750C1 |
Изобретение относится к области контроля тормозов. Осуществляют контроль линейного вихревого тормоза, при котором через обмотку тормозного магнита проходит электрический ток. Измеряют электрический ток (i2, i4). Сравнивают временную характеристику измеренного тока с хранящейся в памяти характеристикой эталонного тока (i1, i3). Достигается контроль тормоза. 20 з.п. ф-лы, 4 ил.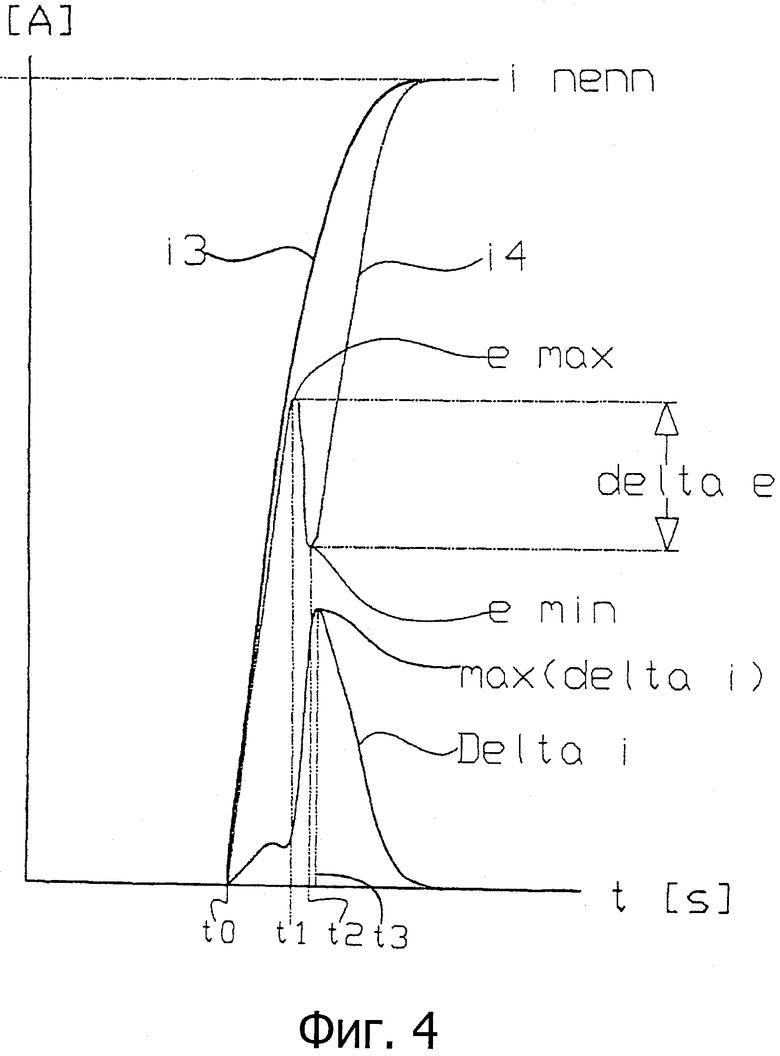
1. Способ контроля рельсовых тормозов, при котором через обмотку тормозного магнита проходит электрический ток, отличающийся тем, что он содержит следующие этапы:
- измерение электрического тока (i2, i4);
- сравнение временной характеристики измеренного тока с хранящейся в памяти характеристикой эталонного тока (i1, i3).
2. Способ по п.1, отличающийся тем, что сравнение осуществляют за счет образования разности между измеренным током (i2, i4) и эталонным током (i1, i3).
3. Способ по п.2, отличающийся тем, что разность между измеренным током (i2, i4) и эталонным током (i1, i3) интегрируют по времени.
4. Способ по п.1 или 2, отличающийся тем, что сравнение осуществляют только в пределах заданного интервала времени в процессе включения рельсового тормоза, причем заданный интервал времени короче продолжительности между включением тока и достижением номинального тока.
5. Способ по п.1, отличающийся тем, что ток подают к обмотке тормозного магнита импульсами (Р1-Р4), при этом сравнение при каждом импульсе (Р1-Р4) осуществляют заново.
6. Способ по п.1 или 2, отличающийся тем, что определяют локальные минимумы (е min) и/или локальные максимумы (е max) измеренного тока (i4), при этом сравнению с эталонным током (i3) подвергают только временную характеристику измеренного тока (i4) с его нарастанием.
7. Способ по п.6, отличающийся тем, что сравнению с эталонным током (i3) подвергают только следующую за локальным минимумом (е min) характеристику измеренного тока (i4).
8. Способ по п.6, отличающийся тем, что при регистрации локальных минимумов (е min) и локальных максимумов (е max) измеренного тока (i4) определяют временной интеграл разности между скоростью изменения измеренного тока (i4) и эталонного тока (i3) в течение заданной продолжительности и сравнивают с заданным пороговым значением.
9. Способ по п.1 или 2, отличающийся тем, что хранящуюся в памяти временную характеристику эталонного тока (i1, i3) определяют в зависимости от типа рельсового тормоза.
10. Способ по п.1, отличающийся тем, что хранящуюся в памяти временную характеристику эталонного тока (i1, i3) определяют независимо от типа рельсового тормоза и сравнение временной характеристики измеренного тока с временной характеристикой эталонного тока осуществляют в зависимости от, по меньшей мере, одного порогового значения, установленного в зависимости от типа рельсового тормоза.
11. Способ по п.6, отличающийся тем, что временной промежуток (t1-t2) возникновения локального максимума (е max) и локального минимума (е min) сравнивают с соответствующими значениями эталонного сигнала.
12. Способ по п.1 или 2, отличающийся тем, что перед сравнением измеренный ток (i2, i4) фильтруют с помощью фильтра нижних частот.
13. Способ по п.12, отличающийся тем, что предельная частота фильтра нижних частот составляет менее 50 Гц.
14. Способ по п.6, отличающийся тем, что определяют разность значений тока между локальным максимумом (е max) и локальным минимумом (е min) и сравнивают с заданным пороговым значением.
15. Способ по п.14, отличающийся тем, что пороговое значение соответствует, по меньшей мере, 30% разности эталонного тока.
16. Способ по п.1 или 2, отличающийся тем, что интеграл разности между измеренным током (i2, i4) и экстраполированным, начиная с момента первого экстремального значения (е max), отрезком кривой до достижения номинального тока (е nenn) сравнивают с пороговым значением.
17. Способ по п.16, отличающийся тем, что разность интеграла образуют в пределах заданного временного окна.
18. Способ по п.17, отличающийся тем, что временное окно покрывает область до (t2-x) и после (t2+x) локального минимума (е min).
19. Способ по п.18, отличающийся тем, что измеренный в момент (t2) локального минимума (е min) ток сравнивают со средним значением измеренного во временном окне тока.
20. Способ по п.6, отличающийся тем, что проверяют, лежит ли момент возникновения максимума (max(delta i)) разности (delta i) между фактическим током (i4) и эталонным током (i3) в пределах заданного временного окна (t2-x до t2+x), где x меньше/равен 1 с.
21. Способ по п.1 или 2, отличающийся тем, что измеренное значение тока (i4) и/или характеристику эталонного тока (i3) нормируют в зависимости от величины измеренного электрического тока (i4) в его установившемся состоянии.
| DE 10155143 A1, 28.05.2003 | |||
| EP 1177962 A2, 06.02.2006 | |||
| Способ получения настойки красавки | 1983 |
|
SU1183117A1 |

