Изобретение относится к области транспортной техники и может быть использовано для уменьшения массы и габаритов транспортных средств шагающего типа и снижения энергозатрат на движение.
Известно многоопорное шагающее транспортное средство по авторскому свидетельству №821282, МПК B62D 57/02, опубл. 18.04.1981, содержащее побортно расположенные четыре крайние и четыре средние телескопические опорные стойки, снабженные отдельными приводами вертикального перемещения опорных стоек и имеющие возможность возвратно-поступательного перемещения под действием своих приводов по горизонтальным направляющим, установленным с возможностью поворота вокруг вертикальных осей и соединенным с приводом их вращения цепной передачей.
Недостатком данной конструкции является то, что из-за постоянства скоростей побортно расположенных движителей невозможно осуществить кинематически точный поворот транспортного средства, что приводит к увеличению энергозатрат и снижению проходимости. Кроме того, расположение по борту четырех движителей приводит к значительному увеличению длины транспортного средства, что уменьшает возможность маневрирования между вертикальными препятствиями.
Известно шагающее транспортное средство по патенту на изобретение №2003565, МПК B62D 57/032, опубл. 30.11.1993, содержащее корпус, по бортам которого расположены связанные с приводом поворота два передних и два задних кронштейна, на которых установлены горизонтальные направляющие, снабженные ведущими и ведомыми валами со звездочками, причем ведущие валы соединены трансмиссией с силовым приводом, а звездочки охвачены лежащей в горизонтальной плоскости бесконечной цепью, на каждой из которых закреплено несколько кареток с телескопическими опорными стойками, взаимодействующими с копирами направляющей.
Недостатком данной конструкции является то, что телескопические стойки, находясь на бесконечной цепи, движутся с одинаковой скоростью как в режиме опирания на грунт, так и в режиме переноса, что приводит к необходимости увеличения их количества, а следовательно, к увеличению массы и габаритов транспортного средства и, в конечном счете, к увеличению энергозатрат. Кроме того, круговое движение телескопических стоек на бесконечной цепи и их вертикальное перемещение по копирам делает невозможным изменение высоты подъема стоек, что приводит к излишним энергозатратам при движении по местности с ровным рельефом.
Техническим результатом заявленной конструкции шагающего транспортного средства является снижение энергозатрат при его движении за счет уменьшения массы и габаритов движителей и возможности изменять траектории перемещения телескопических опорных стоек в зависимости от рельефа местности.
Указанный технический результат достигается тем, что в шагающем транспортном средстве, содержащем корпус, по бортам которого расположены два передних и два задних кронштейна, установленных с возможностью поворота вокруг вертикальных осей и соединенных с горизонтальными направляющими, на которых установлены каретки с телескопическими опорными стойками, снабженными отдельными приводами горизонтальных и вертикальных перемещений, на каждом кронштейне установлена дополнительная горизонтальная направляющая и смонтированы две телескопические опорные стойки, при этом направляющие параллельны и соединены между собой, а каждый кронштейн снабжен отдельным приводом поворота. Кроме того, каретки снабжены шариковыми втулками, направляющие для каждой телескопической стойки выполнены в виде двух цилиндрических труб, разнесенных по высоте, а все приводы выполнены электромеханическими с возможностью программного управления.
Установка на каждом кронштейне дополнительной направляющей и двух телескопических опорных стоек, снабженных отдельными приводами горизонтальных и вертикальных перемещений, позволяет уменьшить количество опорных стоек, массу транспортного средства, а следовательно, и энергозатраты на движение.
Соединение направляющих в единый блок позволяет снизить в них напряжение от изгиба и уменьшить их массу и энергозатраты на движение.
Установка на каждом кронштейне отдельного привода поворота позволяет исключить соединяющие их трансмиссии, тем самым уменьшить массу транспортного средства и снизить энергозатраты на движение.
Выполнение направляющих для каждой телескопической стойки в виде двух цилиндрических труб, разнесенных по высоте, также снижает в них напряжение от изгиба и позволяет уменьшить массу и энергозатраты на движение.
Установка в каретках шариковых втулок позволяет снизить потери на трение и энергозатраты на движение.
Применение отдельных электромеханических приводов с индивидуальным программным управлением при повышении маневренности позволяет уменьшить массу транспортного средства за счет исключения трансмиссии, а следовательно, и энергозатраты на движение.
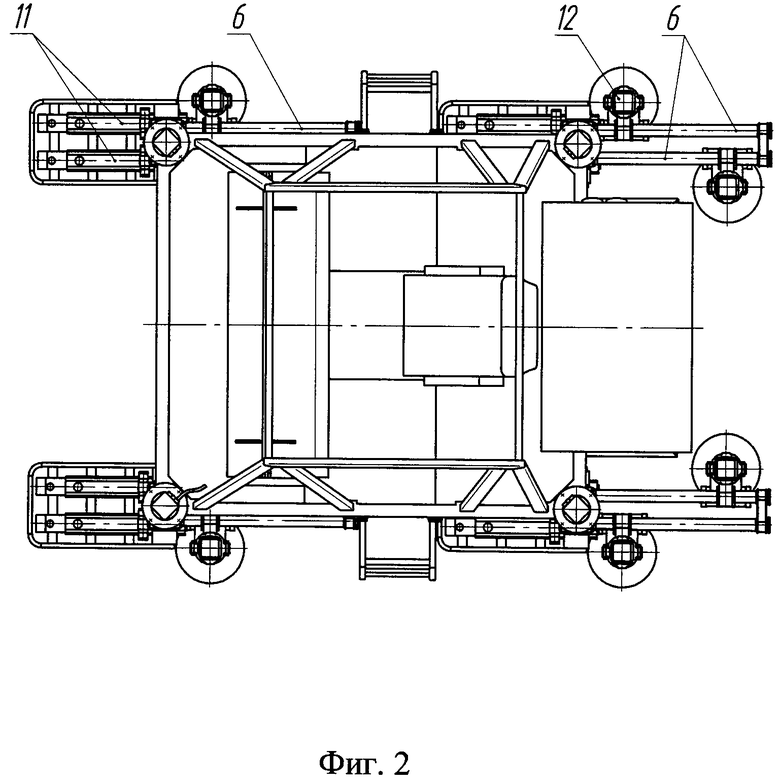
На фиг.1 представлен общий вид шагающего транспортного средства, на фиг.2 - то же, вид сверху.
Шагающее транспортное средство (фиг.1) содержит корпус 1, на котором установлены автономный источник электропитания 2 и блок управления 3. По бортам транспортного средства расположены два передних и два задних кронштейна 4, установленных с возможностью поворота вокруг вертикальных осей и снабженных электромеханическими приводами поворота 5. На каждом кронштейне 4 закреплены по две пары разнесенных по высоте направляющих 6, на которых размещены каретки 7 с шариковыми втулками 8, соединенные с корпусами 9 двух телескопических опорных стоек 10. Корпуса 9 связаны с кронштейном 4 отдельными реверсивными электромеханическими приводами горизонтальных перемещений 11, а сами телескопические опорные стойки 10 снабжены отдельными электромеханическими приводами вертикальных перемещений 12.
Поступательное движение шагающего транспортного средства осуществляется четырьмя приводами горизонтальных перемещений 11 (по одному из каждой пары) за счет синхронного перемещения с номинальной скоростью направляющих 6 и соединенных с ними кронштейнов 4 и корпуса 1 по шариковым втулкам 8 кареток 7 одной из каждой пары телескопических опорных стоек 10, находящихся в контакте с опорной поверхностью.
Одновременно четыре других из каждой пары телескопических опорных стоек 10 в поднятом положении с максимальной скоростью переносятся соединенными с ними приводами горизонтальных перемещений 11 по другим направляющим 6 в сторону движения корпуса 1. По достижении этими стойками 10 крайнего переднего положения они начинают движение в обратном направлении с номинальной скоростью с одновременным опусканием вниз. После касания этой группой телескопических опорных стоек 10 опорной поверхности первые четыре стойки 10 начинают подъем вверх, продолжая движение с номинальной скоростью, а вторая группа направляющих 6 с корпусом 1 продолжает движение по шариковым втулкам 8 второй группы телескопических опорных стоек 10.
После достижения первой группой телескопических опорных стоек 10 крайнего заднего положения и максимального подъема они начинают перемещение с максимальной скоростью до крайнего переднего положения.
Далее цикл повторяется.
При повороте транспортного средства каждый из четырех приводов поворота 5 разворачивает кронштейны 4 на заданный угол в зависимости от радиуса поворота и, соответственно, изменяется скорость горизонтальных перемещений каждой пары телескопических опорных стоек 10. Синхронизация перемещений между парами не является обязательной, так как в каждой паре одна из стоек 10 находится в контакте с опорной поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| СИММЕТРИЧНЫЙ ТРЁХКООРДИНАТНЫЙ ДВИЖИТЕЛЬ С ЛИНЕЙНО-СКОЛЬЗЯЩЕЙ ОПОРОЙ И ВСТРАИВАЕМЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ, И СИММЕТРИЧНАЯ ШАГАЮЩАЯ ПЛАТФОРМА НА ЕГО ОСНОВЕ | 2016 |
|
RU2643613C2 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| ШАГОВАЯ ОПОРА-НОГА | 2019 |
|
RU2726339C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| ШАГОХОД ТОЛСТОУХОВА В.П. | 2019 |
|
RU2724434C1 |
| ШАГАЮЩАЯ МАШИНА | 1995 |
|
RU2099230C1 |
| ШАГОВЫЙ МЕХАНИЗМ | 2019 |
|
RU2716305C1 |
| ШАГАЮЩАЯ ОПОРА | 1994 |
|
RU2086450C1 |
Изобретение относится к области транспортной техники. Шагающее транспортное средство содержит корпус, по бортам которого расположены два передних и два задних кронштейна, установленных с возможностью поворота вокруг вертикальных осей и снабженных отдельными приводами поворота. На каждом кронштейне смонтированы параллельные, соединенные между собой направляющие для двух телескопических опорных стоек, снабженных отдельными электромеханическими приводами горизонтальных и вертикальных перемещений. Направляющие для каждой стойки выполнены в виде двух разнесенных по высоте цилиндрических труб, и на них размещены каретки с шариковыми втулками, соединенные с корпусами телескопических опорных стоек. Достигается снижение энергозатрат на движение шагающего транспортного средства за счет уменьшения массы и габаритов движителей и возможности изменять траекторию перемещения телескопических опорных стоек в зависимости от рельефа местности. 2 з.п. ф-лы, 2 ил.
1. Шагающее транспортное средство, содержащее корпус, по бортам которого расположены два передних и два задних кронштейна, установленных с возможностью поворота вокруг вертикальных осей и соединенных с горизонтальными направляющими, на которых установлены каретки с телескопическими опорными стойками, снабженными отдельными приводами горизонтальных и вертикальных перемещений, отличающееся тем, что на каждом кронштейне параллельно горизонтальной направляющей установлена соединенная с ней дополнительная направляющая и смонтированы по две телескопические опорные стойки, при этом каждый кронштейн снабжен отдельным приводом поворота.
2. Шагающее транспортное средство по п.1, отличающееся тем, что каретки снабжены шариковыми втулками, а направляющая для каждой телескопической стойки выполнена в виде двух цилиндрических труб, разнесенных по высоте.
3. Шагающее транспортное средство по п.1, отличающееся тем, что все привода выполнены электромеханическими.
| RU 2003565 C1, 30.11.1993 | |||
| CN 101712340 A, 26.05.2010 | |||
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАКЛОННЫМ И ВЕРТИКАЛЬНЫМ ПОВЕРХНОСТЯМ | 2003 |
|
RU2267434C2 |
| JP 60206791 A, 18.10.1985. | |||

