Изобретение относится к области робототехники и приборостроения и является аппаратным обеспечением процесса проектирования робототехнических устройств, снабженных встраиваемыми системами управления.
Изобретение является мехатронным устройством и может быть применено при разработке конструкций и систем управления шагающих машин.
Исходя из особенностей процесса разработки конструкций и систем управления для указанного класса робототехнических объектов и предъявляемых к ним требований, аппаратное обеспечение должно предоставлять разработчику возможность использования эффективных в эксплуатации технических решений, обеспечивающих достижение способности шагающих машин к автоматическому изменению манеры движения, автоматической адаптации к изменениям рельефа поверхности, автоматическому восстановлению функционирования при действии ряда внешних механических возмущений, а также обеспечивающих достижение высоких показателей проходимости и экономичности функционирования при одновременном снижении трудоемкости их проектирования.
Известны конструкции шагающих машин повышенной проходимости, снабженных шагающими движителями. К ним относится, например, шагающий движитель повышенной проходимости, описанный в [1] - RU №2435693 (C1), B62D 57/032, опубл. 10.12.2011. Изобретение относится к области транспортной техники и позволяет повысить скорость передвижения и проходимость шагающих машин. За счет использования реверсивного привода движитель обладает возможностью возвратно-поступательного движения через штангу, на концах которой смонтированы пары поперечно разнесенных стоек. Недостатком данного решения является невозможность изменения манеры передвижения в связи с тем, что в конструкции использована единственная силовая установка, а управление осуществляется посредством конструктивно неизменяемой трансмиссии. К недостаткам также относится невозможность восстановления работоспособности при опрокидывании конструкции, а также невозможность движения по трассам переменной ширины вследствие неизменяемого размера колеи шагающей машины.
Для обеспечения возможности изменения манеры передвижения в конструкцию шагающей машины вводят несколько независимых приводов. К таким решениям относится шагающий ход и самоходная машина на его основе, описанные в [2] - RU №2452647 (С1), B62D 57/032, опубл. 10.06.2012. Эта самоходная машина содержит несколько шагающих ходов, кривошипы которых соединены и развернуты по углу поворота друг относительно друга. При этом направляющие ползунов шарнирно закреплены на платформе в плоскости движения ползунов, управление осуществляется независимыми силовыми установками левого и правого бортов, а поворот осуществляется путем изменения скорости движения одного из бортов. Недостатком данного решения является невозможность регулировать высоту подъема каждого из ходов по отдельности и, как следствие, отсутствие адаптивности самоходной машины к изменениям рельефа поверхности. К недостаткам также относится невозможность восстановления работоспособности при опрокидывании конструкции, и, кроме того, невозможность движения по трассам переменной ширины вследствие неизменяемого размера колеи шагающей машины. Кроме того, при единичном отказе в любой силовой установке машина теряет способность к передвижению.
В наибольшей степени требованиям к аппаратному оснащению процесса проектирования конструкций и систем управления шагающих машин отвечает выбранное в качестве прототипа шагающее транспортное средство [3] - RU №2495780 (C1), B62D 57/032, опубл. 20.10.2013.
В прототипе повышение устойчивости к отказам силовых установок достигается путем увеличения количества приводов. По бортам шагающего транспортного средства расположены два передних и два задних кронштейна с возможностью поворота вокруг вертикальных осей и снабженных отдельными приводами поворота. На каждом из кронштейнов размещены параллельные направляющие для двух телескопических опорных стоек, снабженных отдельными приводами для горизонтального и вертикального перемещения. При этом поступательное движение осуществляется за счет четырех приводов горизонтального перемещения путем синхронного перемещения направляющих и соединенных с ними шариковыми втулками кареток одной из каждой пары телескопических стоек.
Установка в устройстве-прототипе на каждом кронштейне отдельного привода поворота позволяет исключить соединяющие их трансмиссии, тем самым уменьшив массу транспортного средства и снизив энергозатраты на движение.
При повороте транспортного средства-прототипа каждый из четырех приводов поворота разворачивает кронштейны на заданный угол в зависимости от радиуса поворота, тем самым изменяя скорость горизонтальных перемещений каждой пары телескопических опорных стоек. При этом синхронизация перемещений между парами не является обязательной, так как в каждой паре одна из стоек гарантированно находится в контакте с опорной поверхностью.
Таким образом, решение-прототип позволяет изменять манеру движения транспортного средства и обладает повышенной проходимостью, однако обладает значительной сложностью и, как следствие, пониженной надежностью конструкции.
Кроме того, к недостаткам прототипа относится невозможность восстановления работоспособности конструкции при ее опрокидывании.
Нерешенной в прототипе также осталась проблема движения по трассам переменной ширины вследствие неизменяемого размера колеи шагающей машины.
Технической задачей, на решение которой направлено заявляемое изобретение, является создание новых конструктивных решений, способствующих повышению проходимости, маневренности и устойчивости шагающих транспортных средств на неподготовленных поверхностях с изменяющимися шириной, рельефом и составом, обладающих возможностью самовосстановления работоспособности при опрокидывании и возможностью функционирования в перевернутом положении.
Важной для практических применений разновидностью таких конструктивных решений является патентуемая симметричная шагающая платформа (далее - платформа) с симметричными шагающими движителями (далее - движители, движитель) и встраиваемым устройством управления.
Техническими результатами патентуемого изобретения являются:
- снижение требований к топологическим характеристикам поверхности (в том числе изменениям ширины полосы движения, возможному появлению на трассе протяженных продольных углублений или возвышенностей), что обеспечивает улучшение проходимости, маневренности, скорости прохождения трассы, результирующей энергоэкономичности;
- снижение требований к качеству и составу поверхности (в том числе к неровным и неоднородным твердым, вязким и сыпучим поверхностям), что обеспечивает повышение проходимости платформы и скорости прохождения трассы;
- снижение времени восстановления работоспособности при опрокидывании и перевороте конструкции, что обеспечивает улучшение интегральных показателей надежности функционирования платформы;
- расширение диапазона регулируемых высот центра тяжести платформы, что обеспечивает увеличение устойчивости движения платформы, в том числе на склонах.
Заявленные технические результаты достижимы при расширении многообразия реализуемых движителями локомоций при одновременном снижении конструктивной сложности самих движителей путем использования приводов с расширенными функциональными возможностями, и увеличении точности и согласованности управления элементами каждого движителя путем использования следящих и адаптивных встраиваемых устройств управления на основе функционально-ориентированных микроконтроллеров.
Сущность изобретения и его реализуемость поясняются структурными схемами, представленными на фиг. 1 и фиг. 2.
В конструкции платформы использовано четное количество движителей (не менее четырех), распределенных поровну на обоих боковых бортах платформы. Каждый движитель (фиг. 1) содержит линейно-скользящую опору (1), перемещающуюся внутри направляющего крепления (2) и приводимую в движение при помощи сервопривода (3). Перемещения узла (1, 2, 3) в вертикальной плоскости осуществляются посредством сервопривода (4), прикрепленного к сервоприводу (5), выполняющему горизонтальные перемещения движителя посредством жесткого сочленения (6). Для соприкосновения опоры с поверхностью, а также для уменьшения давления на поверхность, на концах опоры расположены площадки (7), прикрепленные к опоре посредством шарниров (8). Одновременное согласованное управление сервоприводами движителя осуществляется посредством встраиваемого устройства управления на основе функционально-ориентированного микроконтроллера. Датчики, аппаратное и программное обеспечение микроконтроллера позволяют регистрировать параметры поверхности, определять положение платформы в пространстве (в том числе выявлять аварийно-опасные ситуации, а также состояния опрокидывания и переворота) и формировать физические сигналы согласованного управления сервоприводами, что обеспечивает высокую скорость и точность выполнения каждой локомоции.
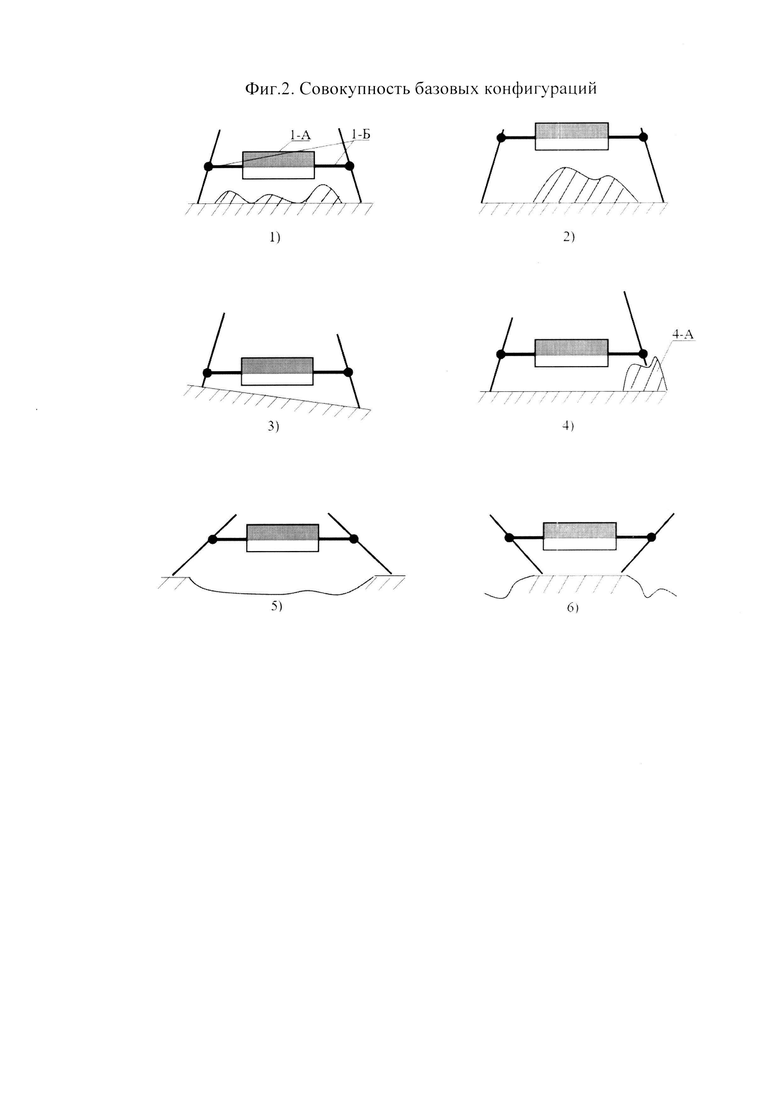
Платформа (фиг. 2, 1-А), оснащенная такими движителями (фиг. 2, 1-Б), обладает совокупностью базовых конфигураций, иллюстрированных фиг. 2 и описанных в табл. 1. Верхняя сторона платформы выделена заливкой серым цветом.


Указанные конструктивные конфигурации возможно использовать как но отдельности, так и в совокупности (например, движение по узкой поверхности с боковой неровностью обеспечивается комбинацией конфигураций №6 и №4).
Конструктивная симметричность платформы иллюстрируется фиг. 3. При перевороте платформы из номинального положения (1) относительно своей оси (2), платформа, путем приведения движителей в рабочее положение (3), способна к формированию всех указанных выше базовых конфигураций и их комбинаций (4).
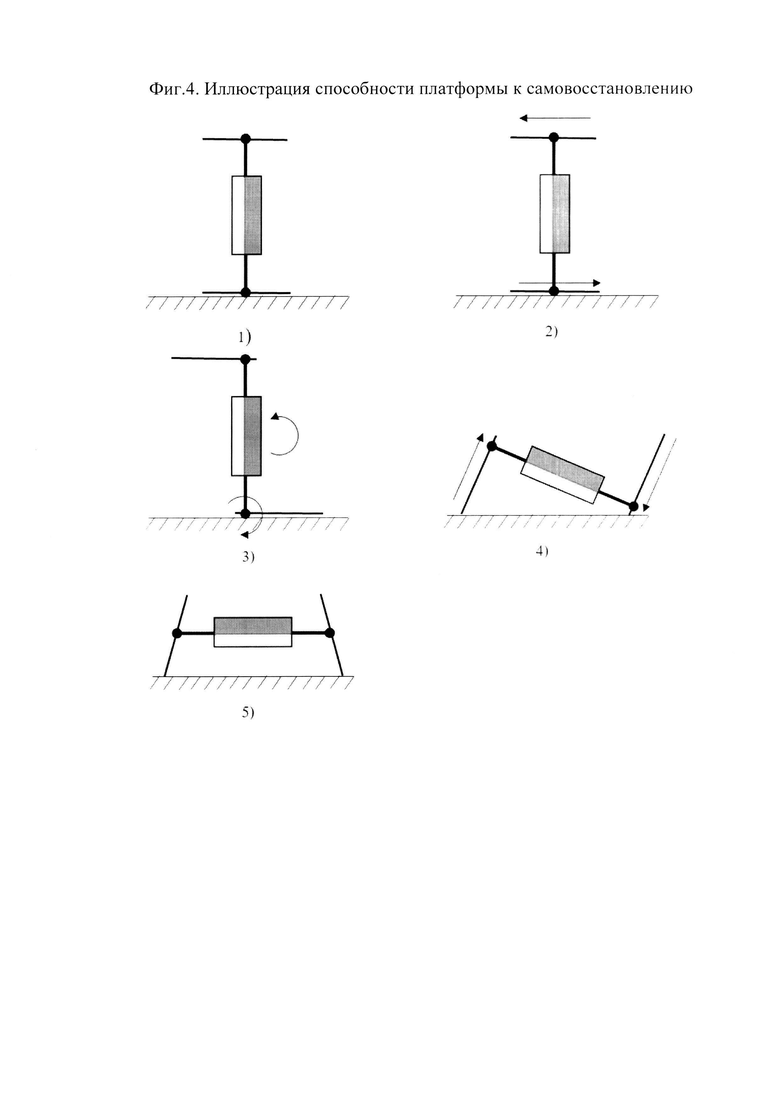
Способность платформы к автоматическому восстановлению работоспособности при опрокидывании вследствие действия внешних механических возмущений иллюстрирует фиг. 4. При обнаружении встраиваемым устройством управления ситуации опрокидывания (1), платформа смещает в противоположные стороны опоры пары находящихся в воздухе движителей, относительно пары движителей, имеющих контакт с поверхностью, что обеспечивает смещение центра тяжести платформы относительно вертикали (2); далее, посредством управления парой движителей, имеющих контакт с поверхностью, выполняется отталкивание от поверхности и управляемый переворот (3), после чего происходит выравнивание положения корпуса платформы (4) и переход в номинальную конфигурацию (5).
В отличие от прототипа, предлагаемая платформа дополнительно обладает возможностью автоматического восстановления работоспособности при опрокидывании и возможностью функционирования в перевернутом положении, а также обладает способностью движения по трассам переменной ширины, рельефа и состава. Благодаря примененным в заявляемом изобретении техническим решениям обеспечено упрощение конструкции и, как следствие, улучшение интегральных показателей надежности. Кроме того, обеспечено улучшение маневренности и устойчивости на участках сложного рельефа, что, в свою очередь, обеспечивает повышение результирующей энергоэффективности и скорости прохождения трассы по сравнению с прототипом.
Таким образом, из рассмотренного следует, что заявляемое изобретение технически осуществимо и обеспечивает достижение технического результата, заключающегося в создании симметричного трехкоординатного движителя с линейно-скользящей опорой и встраиваемым устройством управления, и симметричной шагающей платформы на его основе, обладающей, по сравнению с прототипом, принципиально отличающими ее функциональными возможностями при движении по трассам переменной ширины, рельефа и состава, способностью самовосстановления работоспособности в условиях действия внешних возмущений и возможностью функционирования в перевернутом положении, что обеспечивает повышение эффективности проектирования и применения шагающих машин в задачах автоматики и робототехники.
Источники информации
1. RU №2435693 (С1), B62D 57/032, опубл. 10.12.2011.
2. RU №2452647 (C1), B62D 57/032, опубл. 10.06.2012.
3. RU №2495780 (C1), B62D 57/032, опубл. 20.10.2013.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495780C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| Шагающий инсектоморфный мобильный микроробот | 2018 |
|
RU2699209C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН ТРАНСПОРТНО-ПОГРУЗОЧНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1998 |
|
RU2153437C2 |
| Многоцелевой подводный аппарат | 2023 |
|
RU2806880C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2422317C1 |


Группа изобретений относится к области робототехники. Симметричная шагающая платформа содержит конструктивно независимые симметричные трехкоординатные движители. Симметричный трехкоординатный движитель содержит три последовательно сочлененных управляемых звена и направляющее крепление, внутри которого перемещается опора. Каждое звено движителя управляется посредством отдельного сервопривода. Сервопривод первого звена позволяет задавать величину выдвижения опоры из крепления. Сервопривод второго звена обеспечивает перемещения опоры в вертикальной плоскости. Сервопривод третьего звена обеспечивает перемещения опоры в горизонтальной плоскости. Устройство управления движителями реализовано на основе функционально-ориентированного микроконтроллера. Достигается повышение проходимости, маневренности и устойчивости шагающих транспортных средств на неподготовленных поверхностях с изменяющимися шириной, рельефом и составом, обладающих возможностью самовосстановления работоспособности при воздействии внешних механических возмущений и возможностью функционирования в перевернутом положении. 2 н. и 1 з.п. ф-лы, 1 табл., 4 ил.
1. Симметричный трехкоординатный движитель с линейно-скользящей опорой и встраиваемым устройством управления, содержащий три последовательно сочлененных управляемых звена и направляющее крепление, внутри которого перемещается опора, отличающийся тем, что каждое звено движителя управляется посредством отдельного сервопривода, при этом сервопривод первого звена позволяет задавать величину выдвижения опоры из крепления, сервопривод второго звена обеспечивает перемещения опоры в вертикальной плоскости, сервопривод третьего звена обеспечивает перемещения опоры в горизонтальной плоскости, что позволяет выполнять высокоточные перемещения опоры движителя одновременно и независимо по каждой из координат трехмерного пространства.
2. Симметричный трехкоординатный движитель с линейно-скользящей опорой и встраиваемым устройством управления по п.1, отличающийся тем, что встраиваемое устройство управления движителя реализовано на основе функционально-ориентированного микроконтроллера, что позволяет регистрировать параметры поверхности, определять положение движителя в пространстве и реализовывать движения опоры движителя, представляющие собой последовательности требуемых сочетаний положений опоры из совокупности положений, допустимых по каждому из измерений.
3. Симметричная шагающая платформа на основе симметричного трехкоординатного движителя с линейно-скользящей опорой и встраиваемым устройством управления, отличающаяся тем, что содержит конструктивно независимые движители по п.2, что позволяет обеспечить возможность движения на поверхностях с изменяющимися шириной, рельефом и составом, возможность самовосстановления работоспособности платформы при воздействии внешних механических возмущений и обеспечить возможность функционирования в перевернутом положении.
| ШАГАЮЩЕЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495780C1 |
| US 2013238183 A1, 12.09.2013 | |||
| Устройство для сварки электрозаклепками | 1949 |
|
SU87404A1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |

