Настоящее изобретение относится к области транспортной техники и может быть использовано для увеличения КПД, увеличения скорости передвижения и повышения профильной проходимости транспортных средств шагающего типа.
Известно шагающее транспортное средство по патенту на изобретение №2267434, МПК В62D 57/032, МПК В62D 57/024, опубл. 10.01.2006, содержащее корпус и шаговый механизм перемещения, выполненный в виде двухсторонних пневмоцилиндров, расположенных перпендикулярно относительно друг друга и связаных между собой корпусом, при этом на концах штоков пневмоцилиндров установлены выдвижные опоры с приводами подъема-опускания.
Недостатком данной конструкции является то, что при перемещении транспортного средства центр тяжести перемещающегося штока с закрепленными на нем выдвижными опорами, смещается относительно корпуса, что приводит к возникновению дополнительных сил трения в пневмоцилиндре, что снижает КПД транспортного средства.
Известно шагающее транспортное средство по авторскому свидетельству №1605470, МПК В62D 57/02, опубл. 30.07.94, содержащее корпус, на каждом борту которого на двух рычагах, связанных с механизмом их поворота, шарнирно установлены две магнитные опоры и расположенную в продольных направляющих корпуса, связанную с приводом ее возвратно-поступательного перемещения каретка, снабженная аналогичными парами опор.
Недостатком данной конструкции является то, что при движении транспортного средства центр тяжести переносимой части может выходить за пределы конструктивных границ опорной части транспортного средства, что приводит к увеличению трения в продольных направляющих, что снижает КПД транспортного средства.
Наиболее близким к заявленному техническому решению является известный шагающий движитель по патенту на полезную модель №87404, МПК В62D 57/02, опубл. 10.10.2009, содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, снабженную дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса, а расстояние между наружными крайними точками пары стоек нижней штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги, а расстояние между парами опорных стоек на обеих штангах одинаково.
Указанный движитель решает техническую задачу, связанную с повышением скорости передвижения движителя за счет сокращения остановок корпуса.
Недостатком данной конструкции является то, что при движении транспортного средства центр тяжести переносимой части может выходить за пределы конструктивных границ опорной части транспортного средства, что приводит к увеличению трения в продольных направляющих, что снижает КПД транспортного средства.
Техническим результатом заявленной конструкции шагающего движителя повышенной проходимости является создание конструкции движителя, содержащего в себе механизм разгружения кинематической пары скольжения, результатом работы которого является снижение трения в кинематических парах скольжения за счет уравновешивания момента силы тяжести в результате сохранения положения центра тяжести переносимой штанги в заданном положении, что повышает КПД движителя.
Указанный технический результат достигается тем, что шагающий движитель, содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения, посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, снабженную дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса, а расстояние между наружными крайними точками пары стоек нижней штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги, а расстояние между парами опорных стоек, на обеих штангах одинаково, движитель содержит систему рекуперации механической энергии и уравновешивания в виде двух, симметрично установленных, между верхней штангой и корпусом, а также между дополнительной штангой и платформой, механизмов, каждый из которых состоит из закрепленных на корпусе и на платформе двух вертикальных втулок и пружины кручения, связанной вертикальным полым валом с зубчатым колесом, находящимся в зацеплении с двумя вал-шестернями, установленными в вертикальных втулках, и связанных с шестернями поочередно входящими в зацепление с двусторонней зубчатой рейкой, зубья на которой нарезаны от конца рейки до середины с одной стороны, а от середины до второго конца - на противоположной стороне, закрепленной на верхней и дополнительной штанге, параллельно верхней и дополнительной горизонтальной штанге соответственно.
Введение системы рекуперации механической энергии и уравновешивания в виде двух, симметрично установленных, между верхней штангой и корпусом, а также между дополнительной штангой и платформой, механизмов, позволяет уравновешивать каждую из штанг независимо от того, стойки какой из штанг находятся в контакте с опорной поверхностью, что позволяет снизить трение в каждой из кинематических пар скольжения, и повысить КПД движителя.
Введение механизмов, каждый из которых состоит из закрепленных на корпусе и на платформе двух вертикальных втулок и пружины кручения, связанной вертикальным полым валом с зубчатым колесом, находящимся в зацеплении с двумя вал-шестернями, установленными в вертикальных втулках, и связанных с шестернями поочередно входящими в зацепление с двусторонней зубчатой рейкой, позволяет с помощью подобранного, в зависимости от параметров движителя, передаточного отношения от зубчатой рейки к зубчатому колесу, связанному полым валом с пружиной кручения, уравновесить момент от силы тяжести, возникающий при выходе центра тяжести переносимой штанги за пределы конструктивных границ кинематических пар скольжения, моментом закручивания пружины кручения, что снижает трение в парах скольжения. Также это позволяет накапливать энергию в пружине на этапе ее закручивания и расходовать эту энергию на перемещение неопорной штанги, что приводит к повышению КПД движителя, таким образом каждый механизм работает также как рекуператор механической энергии.
Введение двусторонней зубчатой рейки с зубьями, нарезанными от конца рейки до середины с одной стороны, и от середины до второго конца - на противоположной стороне, закрепленной на верхней и дополнительной штанге параллельно верхней и дополнительной горизонтальной штанге соответственно, позволяет использовать одну пружину кручения для уравновешивания каждой из перемещающихся штанг независимо от направления момента сил тяжести, что позволяет повысить КПД за счет снижения веса конструкции.
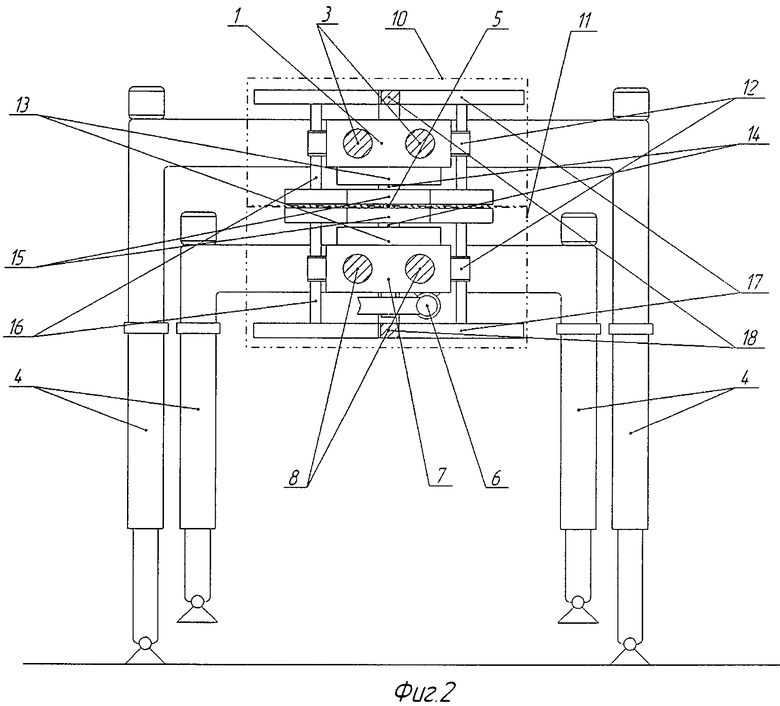
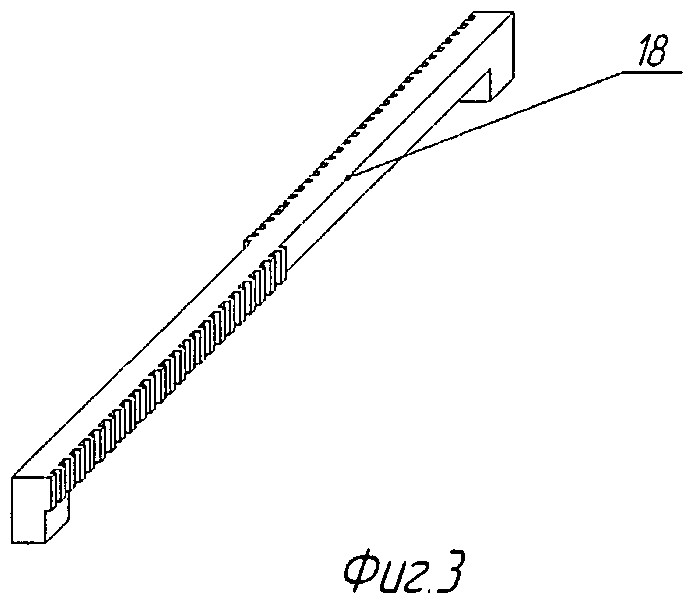
На фиг.1 представлен общий вид шагающего движителя повышенной проходимости; на фиг.2 - система рекуперации механической энергии и уравновешивания; на фиг.3 - двусторонняя зубчатая рейка.
Шагающий движитель (фиг.1), содержащий корпус 1, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода 2 на верхней горизонтальной штанге 3, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек 4, и прикрепленную к его нижней части на вертикальном шарнире 5, связанную с реверсивным приводом поворота 6 платформу 7, снабженную дополнительной горизонтальной штангой 8, связанной с приводом ее возвратно-поступательного перемещения 9, при этом опорные стойки 4 платформы прикреплены к дополнительной штанге 8 аналогично стойкам 4 штанги 3 корпуса 1, а расстояние между наружными крайними точками пары стоек 4 дополнительной штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги 3, а расстояние между парами опорных стоек 4 на обеих штангах одинаково.
Движитель содержит систему рекуперации механической энергии и уравновешивания (фиг.2) в виде двух, симметрично установленных, между верхней штангой 3 и корпусом 1, а также между дополнительной штангой 8 и платформой 7, механизмов 10 и 11, позволяющих уравновешивать каждую из штанг независимо от того, стойки какой из штанг находятся в контакте с опорной поверхностью, что позволяет снизить трение в каждой из кинематических пар скольжения и повысить КПД движителя, состоящих из закрепленных на корпусе 1 и на платформе 7 двух вертикальных втулок 12 и пружины кручения 13, связанной вертикальным полым валом 14 с зубчатым колесом 15, находящимся в зацеплении с двумя вал-шестернями 16, установленными в вертикальных втулках 12, и связанных с шестернями 17 поочередно входящими в зацепление с двусторонней зубчатой рейкой 18, закрепленной на верхней и дополнительной штанге параллельно верхней 3 и дополнительной горизонтальной штанге 8 соответственно, что позволяет с помощью подобранного, в зависимости от параметров движителя, передаточного отношения от зубчатой рейки 18 к зубчатому колесу 15, связанному полым валом 14 с пружиной кручения 13, уравновесить момент от силы тяжести возникающий при выходе центра тяжести переносимой штанги за пределы конструктивных границ кинематических пар скольжения, моментом закручивания пружины кручения 13, что снижает трение в парах скольжения.
Двусторонняя зубчатая рейка 18 (фиг.3) представляет собой прямоугольную зубчатую рейку, зубья на которой нарезаны от конца рейки до середины с одной стороны, и от середины до второго конца - на противоположной стороне, что позволяет использовать одну пружину кручения для уравновешивания каждой из перемещающихся штанг независимо от направления момента сил тяжести, что позволяет повысить КПД за счет снижения веса конструкции.
Работает движитель следующим образом. При движении одна из штанг является опорной, т.е. ее опорные стойки одной из штанг находятся в контакте с опорной поверхностью. В этом случае верхняя 3 и дополнительная 8 штанги перемещаются относительно корпуса 1 и относительно платформы 7 с помощью реверсивных приводов горизонтального перемещения 2 и 6, в нужном направлении. Штанга, являющаяся неопорной, перемещается относительно опорной на заданное расстояние, после чего опорные стойки 4 неопорной штанги выдвигаются до касания опорной поверхности, а стойки опорной штанги, находившиеся в контакте с опорной поверхностью, поднимаются, опорная штанга становится неопорной, а неопорная опорной соответственно, далее цикл повторяется. При относительном перемещении штанг, в зависимости от направления перемещения, одно из зубчатых колес 17 системы рекуперации энергии и уравновешивания находится в зацеплении с одной из сторон двусторонней зубчатой рейки 18, передавая при этом вращение посредством вал-шестерни 16, закрепленной в вертикальных втулках 12, на зубчатое колесо 15, закручивающее через вертикальный полый вал 14 пружину кручения 13, момент закручивания которой компенсирует момент, возникающий при выходе центра тяжести переносимой штанги за конструктивные границы кинематической пары скольжения. Это позволяет накапливать энергию в пружине на этапе ее закручивания и расходовать эту энергию на перемещение неопорной штанги, что приводит к повышению КПД движителя, таким образом каждый из двух механизмов системы работает также как рекуператор механической энергии. На каждом этапе перемещения шагающего движителя компенсируется момент от сил тяжести, возникающий при выходе центра тяжести переносимой штанги за пределы конструктивных границ корпуса, если неопорной является верхняя штанга, либо за пределы конструктивных границ платформы, если неопорной является дополнительная штанга, что снижает трение в парах скольжения движителя, что, в свою очередь, повышает КПД транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2011 |
|
RU2476372C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| Шагающий движитель | 1978 |
|
SU823212A1 |
| Шагающий движитель транспортного средства | 1990 |
|
SU1776602A1 |
| ВОЛНО-ВЕТРОВАЯ ЭЛЕКТРОСТАНЦИЯ | 1996 |
|
RU2136956C1 |
| СИММЕТРИЧНЫЙ ТРЁХКООРДИНАТНЫЙ ДВИЖИТЕЛЬ С ЛИНЕЙНО-СКОЛЬЗЯЩЕЙ ОПОРОЙ И ВСТРАИВАЕМЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ, И СИММЕТРИЧНАЯ ШАГАЮЩАЯ ПЛАТФОРМА НА ЕГО ОСНОВЕ | 2016 |
|
RU2643613C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063354C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
| Мостовой агрегат для сельскохозяйственных работ | 1990 |
|
SU1780605A1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ МНОГООПОРНЫХ САМОХОДНЫХ МАШИН И ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 1993 |
|
RU2063353C1 |
Изобретение относится к области транспортной техники. Шагающий движитель содержит корпус, платформу и систему рекуперации механической энергии и уравновешивания. Корпус смонтирован с возможностью возвратно-поступательного перемещения посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек. Платформа прикреплена к нижней части корпуса на вертикальном шарнире и связана с реверсивным приводом поворота. Платформа снабжена дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения. Опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса. Система рекуперации выполнена в виде двух механизмов, которые симметрично установлены между верхней штангой и корпусом, а также между дополнительной штангой и платформой. Каждый из механизмов состоит из закрепленных на корпусе и на платформе двух вертикальных втулок и пружины кручения, связанной вертикальным полым валом с зубчатым колесом, находящимся в зацеплении с двумя вал-шестернями. Вал-шестерни установлены в вертикальных втулках и связаны с шестернями поочередно входящими в зацепление с двусторонней зубчатой рейкой. Зубья зубчатой рейки нарезаны от конца рейки до середины с одной стороны, а от середины до второго конца - на противоположной стороне. Зубчатая рейка закреплена на верхней и дополнительной штанге параллельно верхней и дополнительной горизонтальной штанге. Достигается повышение проходимости шагающего движителя. 3 ил.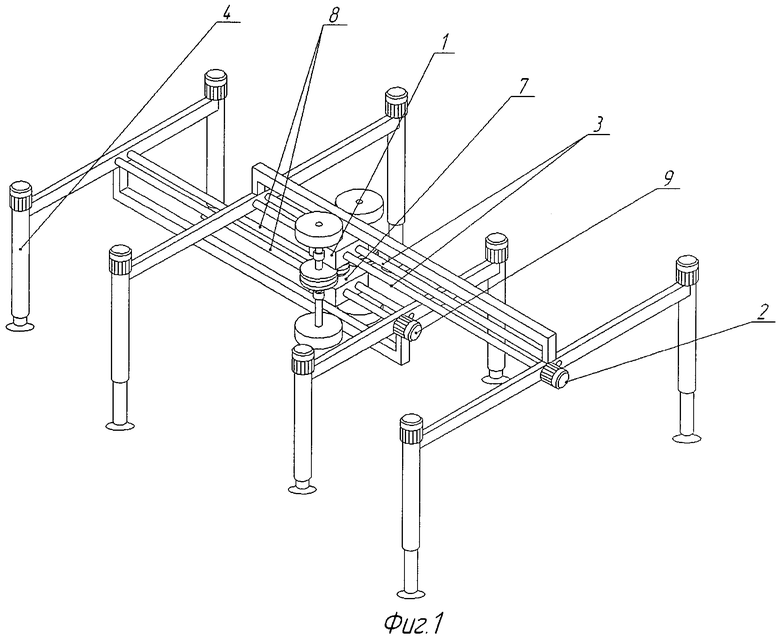
Шагающий движитель, содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, снабженную дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса, а расстояние между наружными крайними точками пары стоек нижней штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги, а расстояние между парами опорных стоек на обеих штангах одинаково, отличающийся тем, что движитель содержит систему рекуперации механической энергии и уравновешивания в виде двух, симметрично установленных, между верхней штангой и корпусом, а также между дополнительной штангой и платформой механизмов, каждый из которых состоит из закрепленных на корпусе и на платформе двух вертикальных втулок и пружины кручения, связанной вертикальным полым валом с зубчатым колесом, находящимся в зацеплении с двумя вал-шестернями, установленными в вертикальных втулках, и связанных с шестернями, поочередно входящими в зацепление с двусторонней зубчатой рейкой, зубья на которой нарезаны от конца рейки до середины с одной стороны, а от середины до второго конца - на противоположной стороне, закрепленной на верхней и дополнительной штанге, параллельно верхней и дополнительной горизонтальной штанге соответственно.
| Устройство для сварки электрозаклепками | 1949 |
|
SU87404A1 |
| 1972 |
|
SU418366A1 | |
| Способ определения газосодержания в отбитом угле | 2023 |
|
RU2813417C1 |
| DE 4340741 A1, 09.06.1994 | |||
| Шагающий движитель | 1978 |
|
SU823212A1 |
| CN 201065142 Y, 28.05.2008. | |||

