Изобретение относится к спасательным средствам, используемым для разборки завалов и перемещения обломков разрушенных сооружений в зонах катастроф.
Известен кран-манипулятор [патент РФ №2207317, В66С 23/44, опубл. 27.06.2003 г.], содержащий смонтированное на транспортном средстве поворотное в вертикальной плоскости основание в виде плоской треугольной фермы. На вершинах основания шарнирно закреплены корпуса трех гидроцилиндров. Штоки всех трех цилиндров соединены между собой и с грузозахватным органом. Для поворота основания предусмотрено два гидроцилиндра, штоки которых закреплены на обращенной вверх стороне основания.
Причинами, препятствующими достижению указанного ниже технического результата, является то, что захватный орган крана-манипулятора незначительно удаляется от кромки несущего шасси и отсутствует возможность поворота основания манипулятора в горизонтальной плоскости, к тому же колесное шасси не обеспечивает требуемую проходимость.
Известен шагающий движитель для перемещения по местности со сложным рельефом [патент на полезную модель №87404, В62В 57/02, опубл. 10.10.2009 г.], содержащий корпус, смонтированный с возможностью возвратно-поступательного перемещения посредством реверсивного привода на верхней горизонтальной штанге, на концах которой смонтированы пары поперечно разнесенных выдвижных вертикальных опорных стоек, и прикрепленную к его нижней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, снабженную дополнительной горизонтальной штангой, связанной с приводом ее возвратно-поступательного перемещения, при этом опорные стойки платформы прикреплены к дополнительной штанге аналогично стойкам штанги корпуса, а расстояние между наружными крайними точками пары стоек нижней штанги меньше расстояния между внутренними крайними точками каждой пары стоек верхней штанги, где расположен механизм поворота.
Недостатком данной конструкции является то, что расстояние между стойками каждой пары верхней штанги ограничивает угол поворота штанг во время перемещения корпуса и штанги. Чем длиннее штанги, тем меньше угол поворота, а следовательно, меньше возможность маневрирования между вертикальными препятствиями и профильная проходимость. Чем штанги короче в известном движителе, тем больше разность времени их перемещения, и корпус, пройдя по короткой штанге, должен остановиться и ждать окончания перемещения длинной штанги, что наряду с остановками корпуса на подъем и опускание выдвижных опорных стоек, уменьшает среднюю скорость передвижения транспортного средства. Также корпус шагающего движителя расположен сверху, тем самым затрудняя установку рабочего оборудования.
Наиболее близким по техническому уровню и достигаемому результату является аварийно-спасательная машина [патент РФ №2137701, В66С 23/36, опубл. 20.09.1999 г.], содержащая шасси, поворотную стойку, на которой шарнирно закреплена стрела и приводные гидроцилиндры, из которых одни взаимодействуют со стрелой, а другие - с поворотной стойкой, снабжается поворотной платформой, которая установлена на шасси, складывающейся поддерживающей опорой с ходовым устройством в виде шагающего механизма и манипулятором с основанием, установленным на опоре и соединенным с концом стрелы посредством стабилизатора.
Причинами, препятствующими достижению указанного ниже технического результата, является то, что аварийно-спасательная машина имеет менее обширную зону обслуживания и более низкую проходимость и устойчивость, к тому же шагающий механизм, находящийся в непосредственной близости со схватом, затрудняет перемещение схвата в труднодоступные места.
Техническим результатом заявленной конструкции аварийно-спасательной машины является создание новой конструкции, имеющей обширную зону обслуживания за счет использования стрелы, выполненной в виде пространственного исполнительного механизма, ребра которого являются телескопическими гидроцилиндрами изменяемой длины; повышающей проходимость и маневренность за счет использования горизонтальных штанг, имеющих возможность перемещения по направляющим, закрепленным по бортам верхнего и нижнего поворотных погонов, при этом на концах штанг установлены выдвижные вертикальные опорные стойки, что позволяет адаптировать корпус к неровностям опорной поверхности и увеличить устойчивость машины за счет того, что в зоне обслуживания горизонтальные штанги опираются на опорную поверхность всеми восемью выдвижными вертикальными опорными стойками.
Указанный технический результат достигается тем, что аварийно-спасательная машина содержит шасси, поворотную стойку с шарнирно закрепленной на ней стрелой и приводной гидроцилиндр, который взаимодействует с поворотной стойкой, поворотная стойка шарнирно соединена с поворотной платформой, установленной на шасси, причем шасси состоит из корпуса, в котором размещены энергетическая установка и блок системы управления, и прикрепленную к его верхней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу, которая состоит из верхнего и нижнего поворотных погонов, по бортам каждого из которых закреплены пары направляющих, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги, связанные с приводами горизонтального перемещения, на концах штанг смонтированы выдвижные вертикальные опорные стойки, связанные с приводами вертикального перемещения. При этом стрела выполнена в виде пространственного исполнительного механизма, ребра которого являются телескопическими гидроцилиндрами.
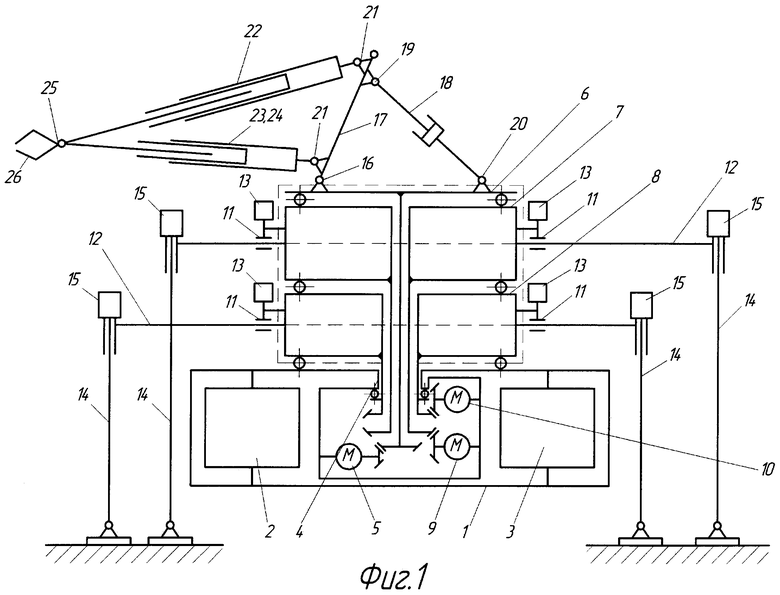
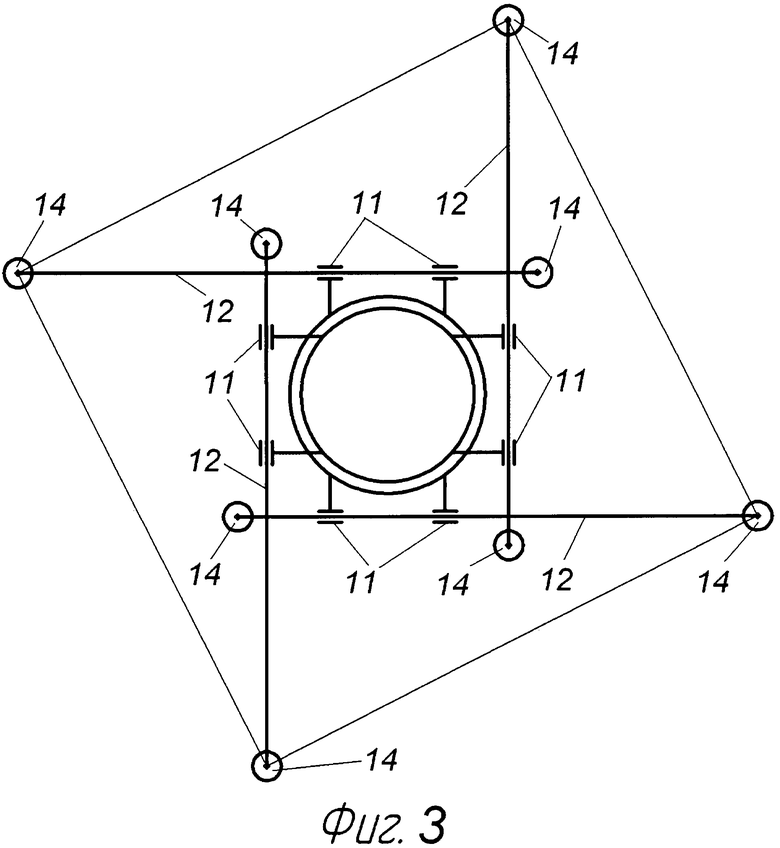
На фиг.1 представлена кинематическая схема аварийно-спасательной машины, на фиг.2 - общий вид аварийно-спасательной машины, на фиг.3 - положение горизонтальных штанг шагающего движителя в наиболее устойчивом состоянии.
Предлагаемая аварийно-спасательная машина содержит шагающее шасси, состоящее из корпуса 1 (фиг.1, 2), в котором размещены энергетическая установка 2 и блок системы управления 3, и прикрепленную к его верхней части на вертикальном шарнире 4, связанную с реверсивным приводом 5 поворота платформу 6, которая состоит из верхнего 7 и нижнего 8 поворотных погонов, связанных с реверсивными приводами поворота 9 и 10 соответственно. По бортам нижнего 8 и верхнего 7 погонов закреплены пары направляющих 11, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги 12, связанные с приводами горизонтального перемещения 13, на концах штанг 12 смонтированы выдвижные вертикальные опорные стойки 14, связанные с приводами вертикального перемещения 15. Вертикальный шарнир 4 выполнен составным таким образом, что вращение платформы 6, погонов 7 и 8 посредством реверсивных приводов 5, 9 и 10 соответственно может происходить независимо как относительно корпуса, так и относительно друг друга.
На платформе 6 с возможностью вращения относительно нее с помощью цилиндрического шарнира 16 закреплена поворотная стойка 17, в свою очередь связанная с приводным цилиндром 18 посредством шарнира 19, другой конец цилиндра крепится в цилиндрическом шарнире 20 к платформе 6. Поворотная стойка 17 и прикрепленные к ней в двуподвижных шарнирах 21 телескопические гидроцилиндры 22, 23 и 24, другие концы которых связаны унифицированным шарнирным узлом 25, образуют стрелу в виде пространственного исполнительного механизма, ребра которого являются телескопическими гидроцилиндрами 22, 23, 24 изменяемой длины. К унифицированному шарнирному узлу 25 присоединен схват 26, обеспечивающий операции захвата материалов в зоне обслуживания.
Работа аварийно-спасательной машины осуществляется следующим образом.
К месту проведения аварийно-спасательных работ машина доставляется своим ходом с помощью шагающего движителя повышенной проходимости. Работает движитель следующим образом. При прямолинейном движении пара штанг 12 по бортам нижнего погона 8 является опорными, т.е. опорные стойки 14 этих пар штанг 12 находятся в контакте с опорной поверхностью. Штанги 12 по бортам верхнего погона 7 являются неопорными (стойки 14 этих штанг подняты относительно опорной поверхности) и перемещаются в направляющих 11 в заданном направлении, причем одновременно корпус 1 вместе с платформой 6 и всеми выше расположенными элементами могут в том же направлении перемещаться относительно опорных штанг. Достигнув крайнего положения, неопорные штанги 12 останавливаются, размещенные на них опорные стойки 14 опускаются до соприкосновения с опорной поверхностью. Далее неопорные штанги становятся опорными, а опорные, размещенные по бортам нижнего погона 8 неопорными за счет того, что опорные стойки 14 этих штанг поднимаются относительно опорной поверхности на заданное расстояние. Далее повторяется аналогичная описанной выше операция. Управление шагающем движителем осуществляется блоком системы управления 3, размещенным в корпусе 1. Для изменения направления движения нижний погон 8 проворачивается в нужном направлении относительно верхнего погона 7 вместе с направляющими 11. Последовательность перемещения опорных и неопорных штанг 12 остается такой же, как и при прямолинейном движении.
Для задания наиболее устойчивого положения в зоне работ шагающий движитель опирается на все восемь опорных стоек 14 (фиг.3) таким образом, что горизонтальные штанги 12 нижнего погона 8 размещаются перпендикулярно штангам верхнего погона 7, причем диагонально расположенные опорные стойки 14 находятся в наибольшем удалении друг от друга.
В исходном положении телескопические гидроцилиндры 22, 23, 24 сложены, поворотная стойка 17 повернута в крайнее заднее положение. Для проведения работ манипулятор с помощью поворотной стойки 17, поворотного 18 и телескопических 22, 23, 24 гидроцилиндров перемещает схват 26 к месту выполнения операции. Необходимое положение схвата манипулятора относительно объекта манипулирования осуществляется с помощью поворотной стойки 17 приводным гидроцилиндром 18 и вращением платформы 6 относительно погонов 7, 8 и корпуса 1, а также выдвижением верхнего 22 и нижних 23, 24 телескопических гидроцилиндров, концы которых связаны унифицированным шарнирным узлом 25, взаимодействующим со охватом 26.
Таким образом, аварийно-спасательная машина заявленной конструкции имеет обширную зону обслуживания, высокие параметры проходимости, маневренности и устойчивости от опрокидывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 2014 |
|
RU2581290C1 |
| ШАГАЮЩИЙ ДВИЖИТЕЛЬ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2010 |
|
RU2435693C1 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА, РАМА ОПОРНОГО ОСНОВАНИЯ, УСТАНОВЛЕННЫЕ НА НЕЙ ЦИСТЕРНА, ПОДЪЕМНО-ПОВОРОТНОЕ УСТРОЙСТВО, ПОЖАРНО-СПАСАТЕЛЬНАЯ ЛЕСТНИЦА И СИСТЕМА ЕЕ ВЫДВИГАНИЯ | 2005 |
|
RU2292928C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2007 |
|
RU2404400C2 |
| ПОЖАРНО-СПАСАТЕЛЬНАЯ МАШИНА | 2012 |
|
RU2517008C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| ТРАНСПОРТНО-ЗАРЯЖАЮЩАЯ МАШИНА | 2000 |
|
RU2194234C2 |
Изобретение относится к спасательным средствам, используемым для разборки завалов и перемещения обломков разрушенных сооружений в зонах катастроф. Аварийно-спасательная машина содержит шасси, поворотную стойку с шарнирно закрепленной на ней стрелой и приводной гидроцилиндр, который взаимодействует с поворотной стойкой, поворотная стойка шарнирно соединена с поворотной платформой, установленной на шасси. Шасси состоит из корпуса, в котором размещены энергетическая установка и блок системы управления, и прикрепленную к его верхней части на вертикальном шарнире, связанную с реверсивным приводом поворота платформу. Платформа состоит из верхнего и нижнего поворотных погонов, по бортам каждого из которых закреплены пары направляющих, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги, связанные с приводами горизонтального перемещения. На концах штанг смонтированы выдвижные вертикальные опорные стойки, связанные с приводами вертикального перемещения. Стрела выполнена в виде пространственного исполнительного механизма, ребра которого являются телескопическими гидроцилиндрами. Достигается повышение проходимости, маневренности и устойчивости устройства. 1 з.п. ф-лы, 3 ил.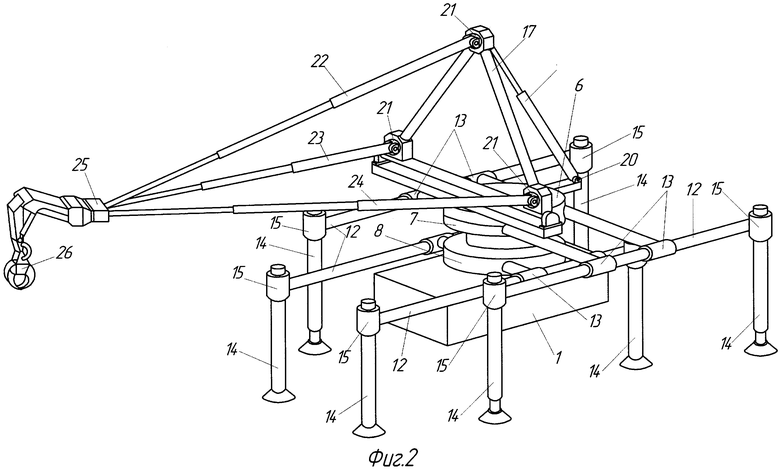
1. Аварийно-спасательная машина, содержащая шасси, поворотную стойку с шарнирно закрепленной на ней стрелой и приводной гидроцилиндр, который взаимодействует с поворотной стойкой, поворотная стойка шарнирно соединена с поворотной платформой, установленной на шасси, отличающаяся тем, что шасси состоит из корпуса, в котором размещены энергетическая установка и блок системы управления, и прикрепленная к его верхней части на вертикальном шарнире, связанная с реверсивным приводом поворота платформу, которая состоит из верхнего и нижнего поворотных погонов, по бортам каждого из которых закреплены пары направляющих, в которых с возможностью горизонтального перемещения установлены горизонтальные штанги, связанные с приводами горизонтального перемещения, на концах штанг смонтированы выдвижные вертикальные опорные стойки, связанные с приводами вертикального перемещения.
2. Аварийно-спасательная машина по п.1, отличающаяся тем, что стрела выполнена в виде пространственного исполнительного механизма, ребра которого являются телескопическими гидроцилиндрами.
| АВАРИЙНО-СПАСАТЕЛЬНАЯ МАШИНА | 1995 |
|
RU2137701C1 |
| МОБИЛЬНЫЙ САМОУКЛАДЫВАЮЩИЙСЯ КРАН | 1994 |
|
RU2083470C1 |
| САМОХОДНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ КРАН ДЛЯ ОБУСТРОЙСТВА СЕЛА | 2008 |
|
RU2385834C1 |
| US 7328810 B1, 12.02.2008. | |||

