Изобретение относится к технике связи, а конкретнее к радиотехническим системам передачи и приема радиосигналов и извлечения информации в приемной информационной системе. К таким системам относятся, в частности, радионавигационные и радиолокационные системы, системы радиоразведки радиотехнических средств, радионаблюдения поверхности Земли и др. [1. Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, стр.7]. Заявляемая радиотехническая система содержит информационную систему, включающую N принимающих радиосигналы радиотехнических объектов в количестве не менее четырех, стационарных или подвижных, с фиксированными или заданными во времени координатами фазовых центров антенн. Источниками радиосигналов могут быть радиотехнические объекты, стационарные или подвижные. Реализация системы позволит, в том числе, определить пространственные координаты этих радиотехнических объектов, а при необходимости и другие траекторные характеристики, зависящие от координат и времени, упростить соответствующие системы извлечения информации, увеличить их технико-экономическую эффективность с учетом всех компонентов, влияющих на стоимость и технические показатели.
Известные радиотехнические системы извлечения информации используются, в том числе, для определения координат радиотехнических объектов и основаны на применении угломерных, дальномерных, разностно и суммарно-дальномерных и комбинированных методов определения местоположения объекта с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигнала [патенты РФ №№2018855, 2115137, 2258242, 2264598, 2309420, 2325666, 2363117, 2371737, 2378660; Основы испытаний летательных аппаратов / Е.И. Кринецкий и др. Под ред. Е.И. Кринецкого. - М.: Машиностр., 1979, с.64-89; Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, гл.10.; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008, гл.5]. Известные системы имеют те или иные недостатки, например необходимость механического перемещения антенной системы, необходимость априорной информации о местоположении объекта, невозможность однозначного определения координат объекта, недостаточную надежность. По критерию минимальной достаточности наиболее близким аналогом является радиотехническая система, содержащая информационную систему, включающую N принимающих радиосигналы радиотехнических объектов в количестве не менее четырех, стационарных или подвижных, соответственно с фиксированными или заданными во времени координатами xn, yn, zn, где n изменяется от 1 до N, в заданной трехмерной декартовой системе координат (X, Y, Z), соответственно, не расположенных в одной плоскости фазовых центров их приемных антенн, и выполненную с возможностью предварительного получения координат xo, yo, zo фазового центра антенны передающего радиосигналы радиотехнического объекта, стационарного или подвижного. Такая система используется в известном разностно-дальномерном методе определения координат объекта [1. Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, с.17-18, п.п.7.1-7.4].
Преимуществом заявляемой системы по сравнению с известными является возможность повышения технико-экономической эффективности радиотехнических комплексов определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в том числе, обеспечение точности и достоверности их определения в соответствии с современными требованиями. Это достигается тем, что пространственные координаты определяют через вновь введенные блоки, выполненные с возможностью определения введенных параметров bk и форм-факторов Aj, определяющих расположение источников радиосигналов, и вычисления координат с использованием простых выражений. Благодаря этому достигается более высокое быстродействие, однозначность и точность определения координат.
Для достижения указанного технического результата в соответствии с настоящим изобретением в радиотехнической системе, содержащей информационную систему, включающую N принимающих радиосигналы радиотехнических объектов в количестве не менее четырех, стационарных или подвижных, соответственно с фиксированными или заданными во времени координатами xn, yn, zn, где n изменяется от 1 до N, в заданной трехмерной декартовой системе координат (X, Y, Z), соответственно, не расположенных в одной плоскости фазовых центров их приемных антенн, и выполненную с возможностью предварительного получения координат xo, yo, zo фазового центра антенны передающего радиосигналы радиотехнического объекта, стационарного или подвижного, информационная система содержит подсистему регистрации, функционально связанную с указанным передающим радиосигналы радиотехническим объектом и со средствами синхронизации и включающую N блоков регистрации моментов времен приема радиосигнала в заданной системе отсчета времени, по одному на каждом принимающем радиосигналы радиотехническом объекте, и при необходимости выполненная с возможностью суммирования указанных моментов времен, определения их среднего значения, исключения из каждого момента времени этого среднего значения и получения таким образом зарегистрированных моментов времен tn, информационная система включает подсистему определения пространственных координат x, y, z фазового центра антенны передающего радиосигналы радиотехнического объекта, содержащую, в том числе, блок вычисления параметров dn=vtn, где v - скорость распространения радиосигналов, функционально связанный с подсистемой регистрации, блок предварительного получения координат xo, yo, zo, блок хранения упомянутых пространственных координат xn, yn, zn и блок вычисления параметров Dn, ξn, ηn, θn, a i, Aj, где Dn - расстояния между точкой с координатами хо, yo, zo и координатами фазовых центров приемных антенн xn, yn, zn, вычисляемые в соответствии с выражениями

ξn, ηn, θn - безразмерные параметры, вычисляемые в соответствии с выражениями

a i - безразмерные параметры, где индекс i изменяется от 1 до 6, вычисляемые в соответствии с выражениями

Aj - безразмерные параметры, где индекс j изменяется от 0 до 6, вычисляемые в соответствии с выражениями

функционально связанный с блоком предварительного получения координат xo, yo, zo и блоком хранения упомянутых пространственных координат; xn, yn, zn, при этом указанная подсистема определения x, y, z содержит блок вычисления параметров bk, где индекс k изменяется от 1 до 3, в соответствии с выражениями
функционально связанный с блоком вычисления параметров dn и указанным блоком вычисления параметров Dn, ξn, ηn, θn, ai, Aj, блок определения параметров Δx, Δy, Δz преимущественно в соответствии с выражениями


функционально связанный с блоком определения параметров Δx, Δy, Δz и блоком предварительного получения координат xo, yo, zo, при этом блок определения уточненных пространственных координат x, y, z функционально связан с блоком передачи информации потребителям, включающим, в том числе, при необходимости в качестве потребителя упомянутый передающий радиосигналы радиотехнический объект, при необходимости в подсистему определения пространственных координат x, y, z между блоком определения уточненных пространственных координат x, y, z и блоком передачи информации потребителям введен блок повторения определения уточненных пространственных координат x, y, z заданное число раз, функционально связанный с блоком предварительного получения координат xo, yo, zo и выполненный с возможностью передачи уточненных пространственных координат x, y, z для использования их при каждом повторении в качестве координат xo, yo, zo в блоке предварительного получения координат xo, yo, zo.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о системах того же назначения с указанной совокупностью признаков.
Ниже изобретение описано более детально со ссылками на чертеже.
На чертеже показана заявляемая система. Радиотехническая система 1 содержит информационную систему 2, включающую N принимающих радиосигналы радиотехнических объектов в количестве не менее четырех, стационарных или подвижных, соответственно с фиксированными или заданными во времени координатами xn, yn, zn, где n изменяется от 1 до N, в заданной трехмерной декартовой системе координат (X, Y, Z), соответственно, не расположенных в одной плоскости фазовых центров их приемных антенн. Система 2 выполнена с возможностью предварительного получения координат xo, yo, zo фазового центра антенны передающего радиосигналы радиотехнического объекта 3, стационарного или подвижного, в указанной системе координат. Информационная система 2 содержит подсистему регистрации 5, функционально связанную с указанным передающим радиосигналы радиотехническим объектом 3 и со средствами синхронизации 4. Подсистема 5 включает N блоков регистрации моментов времен приема радиосигнала в заданной системе отсчета времени, по одному на каждом принимающем радиосигналы радиотехническом объекте. При необходимости подсистема 5 выполнена с возможностью суммирования указанных моментов времен, определения их среднего значения, исключения из каждого момента времени этого среднего значения и получения таким образом зарегистрированных моментов времен tn. Информационная система 2 включает подсистему 7 определения пространственных координат x, y, z фазового центра антенны передающего радиосигналы радиотехнического объекта 3. Подсистема 7 содержит, в том числе, блок 6 вычисления параметров dn=vtn, где v - скорость распространения радиосигналов, функционально связанный с подсистемой регистрации 5, блок 8 предварительного получения координат xo, yo, zo, блок 9 хранения упомянутых пространственных координат xn, yn, zn, блок 10 вычисления параметров Dn, ξn, ηn, θn, a i, Aj, функционально связанный с блоком 8 и блоком 9. Подсистема 7 также содержит блок 11 вычисления параметров bk, функционально связанный с блоком 6 и блоком 10, блок 12 определения параметров Δx, Δy, Δz, функционально связанный с блоком 11 и блоком 10, блок 13 определения уточненных пространственных координат x, y, z фазового центра передающей антенны передающего радиосигналы радиотехнического объекта 3, функционально связанный с блоком 12 и блоком 8. При этом блок 13 функционально связан с блоком 15 передачи информации потребителям 16, включающим, в том числе, при необходимости в качестве потребителя передающий радиосигналы радиотехнический объект 3. При необходимости в подсистему 7 между блоком 13 и блоком 15 введен блок 14 повторения определения уточненных пространственных координат x, y, z заданное число раз, функционально связанный с блоком 8 и выполненный с возможностью передачи уточненных пространственных координат x, y, z для использования их при каждом повторении в качестве координат xo, yo, zo в блоке 8.
Предложенная система 1 работает следующим образом.
Радиотехнический объект 3, стационарный или подвижный, передает радиосигналы. Их синхронизированно принимают N радиотехнических объектов информационной системы 2 в количестве не менее четырех, стационарных или подвижных, соответственно с фиксированными или заданными во времени координатами в упомянутой системе координат xn, yn, zn, где n изменяется от 1 до N, не расположенных в одной плоскости фазовых центров их принимающих антенн. Информационная система 2 выполнена с возможностью предварительного получения координат xo, yo, zo фазового центра приемной антенны радиотехнического объекта 3 в заданной трехмерной декартовой системе координат (X, Y, Z) соответственно. На принимающих радиотехнических объектах регистрируют моменты времен приема радиосигналов в заданной системе отсчета времени подсистемой регистрации 5, включающей N блоков регистрации указанных моментов, по одному на каждом принимающем радиосигналы радиотехническом объекте. Подсистема регистрации 5 при необходимости выполнена с возможностью суммирования указанных моментов времен, определения их среднего значения, исключения из каждого момента времени этого среднего значения и получения таким образом зарегистрированных моментов времен tn. На основании таким образом зарегистрированных моментов времен tn в блоке 6 вычисляют параметры dn=vtn, где v - скорость распространения радиосигналов.
В подсистеме 7 радиотехнической системы через упомянутые предварительно полученные координаты фазового центра передающей антенны передающего радиотехнического объекта xo, yo, zo и заданные упомянутые координаты фазовых центров принимающих антенн xn, yn, zn первоначально в блоке 10 вычисляют расстояния Dn между точкой с координатами xo, yo, zo и координатами фазовых центров приемных антенн xn, yn, zn в соответствии с выражением (1). Указанные предварительно полученные координаты xo, yo, zo могут иметь большие отклонения от точных значений координат объекта x, y, z, как будет показано на примере реализации системы.
Через Dn и безразмерные параметры (2) в блоке 10 вычисляют безразмерные параметры a i и Aj в соответствии с выражениями (3) и (4). Через параметры dn и параметры, определенные в соответствии с выражениями (1) и (2), в блоке 11 вычисляют параметры bk в соответствии с выражениями (5). Через bk и Aj определяют в блоке 12 преимущественно в соответствии с выражениями (6) параметры Δx, Δy, Δz и через них и координаты xo, yo, zo определяют уточненные пространственные координаты x, y, z фазового центра передающей антенны передающего радиосигналы радиотехнического объекта 3 в соответствии с выражениями (7). Полученную таким образом информацию о координатах передают потребителям информации 16, включающим, в том числе при необходимости, в качестве потребителя информации передающий радиосигналы радиотехнический объект 3. При необходимости блок 14 обеспечивает последовательное повторение всех первоначальных действий заданное число раз, каждый раз передавая уточненные пространственные координаты x, y, z для использования их при каждом повторении в качестве координат xo, yo, zo в блоке 8 предварительного получения координат xo, yo, zo.
Покажем возможности предложенной радиотехнической системы по извлечению информации о координатах объекта. Рассмотрим ситуацию с использованием минимально возможного количества принимающих радиосигналы радиотехнических объектов, а именно при использовании четырех спутников. Координаты расположения спутников xn, yn, zn (в м), приведенные в таблице 1, взяты из [2. Ryan Stansifer. Exact solution of the a three dimensional hyperbolic positioning system. Department of Computer Sciences Florida Institute of Technology. Melbourne, Florida USA 32901. Ryan@fit.edu, 20 sept. 2011]:
Для моделирования рассмотрим ситуацию, при которой передающий радиосигналы радиотехнический объект 3 находится в точке пространства с координатами (в м) хоб=2.117912·106, yоб=6.038289·106, zоб=4.46376·106. На объектах информационной системы 2 регистрируют моменты времен приема радиосигналов tn в заданной системе отсчета времени. Введем ошибки измерения времен tn в нс, равные Δt1=1, Δt2=2, Δt3=5, Δt4=-4 соответственно. Измеренные tn, для удобства центрированные относительно среднего значения всех моментов, при указанных ошибках измерений равны (в нс) t1=2.0001540023·106, t2=-1.1519899811·107, t3=7.7473606426·106, t4=1.7723851657·106. Соответствующие этим tn параметры dn определяются как dn=vtn, где v=0.299792458 м/нс.
В качестве предварительно полученных координат х0, y0, z0 передающего радиотехнического объекта 3 в данном примере использованы взятые с отклонениями в десятки тысяч метров от координат xоб, yоб, zоб координаты х0=х об+104, y0=yоб-4·104, z0=zоб+2·104, в м.
Полученные результаты моделирования представлены в таблице 2, все в м.
Из таблицы 2 следует, что заявляемая система позволяет уже на втором этапе определить координаты объекта с отклонениями в несколько метров от точных значений координат (при этом предварительно полученные координаты x0, y0, z0 были заданы с отклонениями в десятки тысяч метров от координат объекта хоб, yоб, zоб). Практически эти отклонения связаны с погрешностями измерений tn, т.к. на последующем этапе уточнение этих отклонений происходит лишь в 4-6 знаках после запятой и составляют менее мм.
Блок 14 осуществляет повторения определения уточненных координат x, y, z заданное число раз, в том числе количество раз может быть задано, исходя из условия, что последующие значения полученных координат отличаются от их предыдущих значений не больше, чем на заданную величину.
На практике заявляемая система позволяет, имея информацию о нахождении объекта в пределах достаточно большого района (например, большого города) с хотя бы одной точкой с известными геодезическими координатами, однозначно определить координаты этого объекта с погрешностями, определяемыми только погрешностью измерения моментов времен приема радиосигналов.
Перечислим основные достоинства системы:
- обеспечивает однозначное извлечение информации о пространственных координатах объекта с большой точностью, соответствующей современным требованиям,
- обеспечивает возможность с высоким быстродействием производить измерения с использованием одного из известных радиотехнических методов и существующей элементной базы и микропроцессорной техники,
- обеспечивает эффективное использование радиочастотного спектра,
- позволяет осуществлять одновременные определения на неограниченном количестве радиотехнических объектов.
Результативность и эффективность использования заявляемой системы состоит в том, что она может быть применена на практике для развития и совершенствования радиотехнических систем определения, преимущественно, координат объектов, а также в других приложениях. Система позволяет определять координаты с большей достоверностью и более просто по сравнению с известными системами.
Таким образом, заявляемая система обеспечивает появление новых свойств, не достигаемых в аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию «новизны».
Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения составляющих на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2496270C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2012 |
|
RU2496272C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2012 |
|
RU2496273C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530233C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530237C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530236C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2543470C1 |
| РАДИОТЕХНИЧЕСКАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2484605C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530239C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2542579C1 |
Изобретение относится к технике связи и может использоваться для определения пространственных координат передающего радиосигналы объекта, в том числе, в аэронавигации. Технический результат - повышение эффективности и точности приема радиотехнической системы. Для этого система содержит N≥4 принимающих радиосигналы радиотехнических объектов и включает блок предварительного получения, не обязательно точных, координат фазового центра передающей антенны объекта в заданной трехмерной декартовой системе координат, подсистему регистрации моментов времен приема радиосигналов на каждом принимающем радиосигналы радиотехническом объекте в заданной системе отсчета времени, блок вычисления введенных параметров и блок определения пространственных координат объекта с использованием предложенных простых выражений. Система позволяет определять координаты с высоким быстродействием, в том числе при большом количестве объектов, и может быть реализована с помощью современной элементной базы и микропроцессорной техники. 1 ил., 2 табл.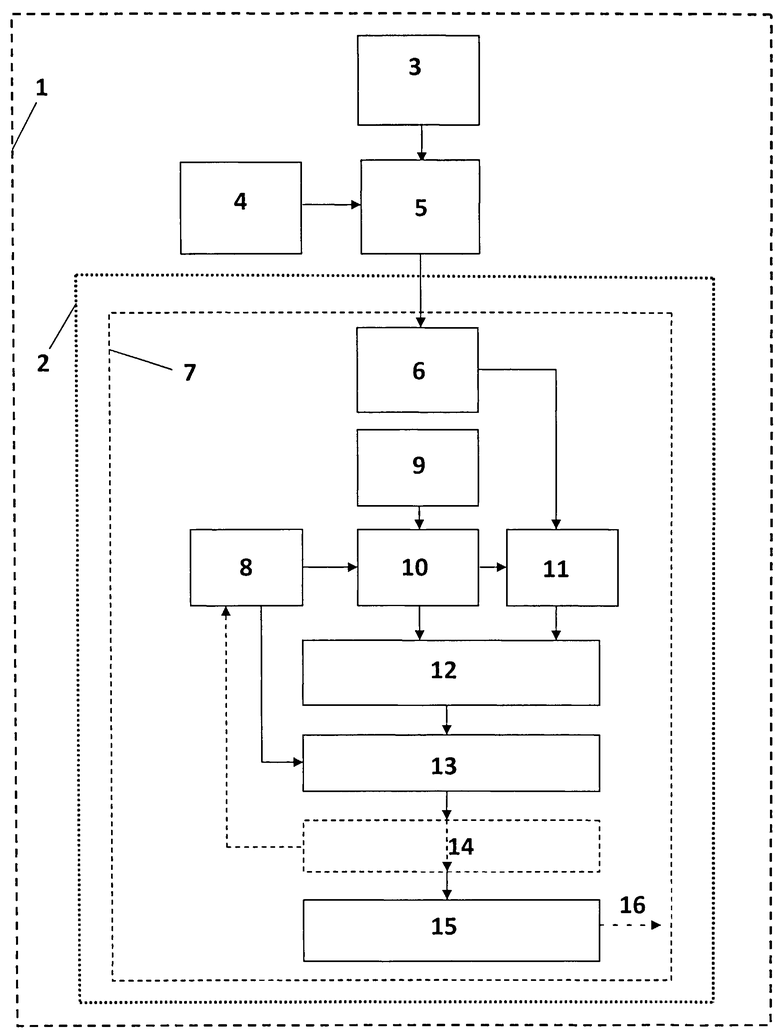
Радиотехническая система, содержащая информационную систему, включающую N принимающих радиосигналы радиотехнических объектов в количестве не менее четырех, стационарных или подвижных, соответственно с фиксированными или заданными во времени координатами xn, yn, zn, где n изменяется от 1 до N, в заданной трехмерной декартовой системе координат (X, Y, Z), соответственно, не расположенных в одной плоскости фазовых центров их приемных антенн, и выполненную с возможностью предварительного получения координат xo, yo, zo фазового центра антенны передающего радиосигналы радиотехнического объекта, стационарного или подвижного, информационная система содержит подсистему регистрации, функционально связанную с указанным передающим радиосигналы радиотехническим объектом и со средствами синхронизации и включающую N блоков регистрации моментов времен приема радиосигнала в заданной системе отсчета времени, по одному на каждом принимающем радиосигналы радиотехническом объекте, и при необходимости выполненная с возможностью суммирования указанных моментов времен, определения их среднего значения, исключения из каждого момента времени этого среднего значения и получения таким образом зарегистрированных моментов времен tn, информационная система включает подсистему определения пространственных координат x, y, z фазового центра антенны передающего радиосигналы радиотехнического объекта, содержащую, в том числе, блок вычисления параметров dn=υtn, где υ - скорость распространения радиосигналов, функционально связанный с подсистемой регистрации, блок предварительного получения координат xo, yo, zo, блок хранения упомянутых пространственных координат xn, yn, zn и блок вычисления параметров Dn, ξn, ηn, θn, a
i, Aj, где Dn - расстояния между точкой с координатами xo, yo, zo и координатами фазовых центров приемных антенн xn, yn, zn, вычисляемые в соответствии с выражениями 
Aj - безразмерные параметры, где индекс j изменяется от 0 до 6, вычисляемые в соответствии с выражениями 






функционально связанный с блоком вычисления параметров dn и указанным блоком вычисления параметров Dn, ξn, ηn, θn, a
i, Aj, блок определения параметров Δx, Δy, Δz преимущественно в соответствии с выражениями Δx=(A1b1+A4b2+A5b3)/A0, Δy=(A4b1+A2b2+A6b3)/A0, Δz=(A5b1+A6b2+A3b3)/A0, функционально связанный с блоком вычисления параметров bk и блоком вычисления параметров Dn, ξn, ηn, θn, a
i, Aj, блок определения уточненных пространственных координат x, y, z фазового центра передающей антенны указанного передающего радиосигналы радиотехнического объекта в соответствии с выражениями x=xo+Δx, y=yo+Δy, z=zo+Δz, функционально связанный с блоком определения параметров Δx, Δy, Δz и блоком предварительного получения координат xo, yo, zo, при этом блок определения уточненных пространственных координат x, y, z функционально связан с блоком передачи информации потребителям, включающим, в том числе, при необходимости в качестве потребителя упомянутый передающий радиосигналы радиотехнический объект, при необходимости в подсистему определения пространственных координат x, y, z между блоком определения уточненных пространственных координат x, y, z и блоком передачи информации потребителям введен блок повторения определения уточненных пространственных координат x, y, z заданное число раз, функционально связанный с блоком предварительного получения координат xo, yo, zo и выполненный с возможностью передачи уточненных пространственных координат x, y, z для использования их при каждом повторении в качестве координат xo, yo, zo в блоке предварительного получения координат xo, yo, zo.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ ПОДТВЕРЖДЕНИЯ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ В СИСТЕМЕ СВЯЗИ OFDMA | 2005 |
|
RU2338326C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

