Область изобретения
Настоящее изобретение относится к тормозной системе катушки с проволокой, которая останавливает вращение катушки после подачи заранее определенной длины обвязочной проволоки, в машине для обвязки арматурных прутков.
Предшествующий уровень техники
Когда в машине для обвязки арматурных прутков подается заранее определенная длина проволоки, подача останавливается, но катушка с проволокой продолжает вращаться по инерции. Поэтому, диаметр мотка проволоки на катушке может увеличиться и возникнет помеха для подачи следующего отрезка проволоки. В качестве средства для решения этой проблемы, например, согласно патентному документу 1 (JP-A-11-156746) был предложен тормозной механизм, в котором тормозной рычаг, имеющий форму крюка (тормозное средство в патентном документе 1), выполненный с возможностью зацепления с катушкой с проволокой, расположен рядом с этой катушкой и приводится в действие соленоидом. Дополнительно, тормозной механизм по патентному документу 1 приводит в действие тормозной рычаг, приводимый в действие соленоидом, для зацепления с периферийной кромкой катушки, останавливая тем самым вращение катушки, после подачи с катушки заранее определенной длины проволоки.
В то же время, в тормозном механизме машины для обвязки арматурных прутков, показанном на фиг.3 патентного документа 1, при конфигурации, содержащей пружину, тормозной рычаг поворачивается вокруг шарнира после включения соленоида возникает некоторая задержка срабатывания тормоза. Дополнительно, например, когда между тормозным рычагом и соленоидом, приводящим в действие тормозной рычаг, расположен рычажный механизм, содержащий пружину, задержка будет еще больше, чем в устройстве по фиг.3 патентного документа 1. Дополнительно, когда в качестве источника питания для соленоида и прочего используется аккумулятор, экономия энергии позволяет эффективно использовать этот аккумулятор в течение увеличенного времени.
Кроме того, в машине для обвязки арматурных прутков по патентному документу 1 катушка с проволокой открыта снаружи корпуса машины, что облегчает ее загрузку. Тормозное средство и соленоид, которые расположены рядом с катушкой, также открыты снаружи. Поэтому когда машину для обвязки арматурных прутков используют вне помещений, в условиях запыления и прочих, может возникнуть ситуация, когда песок и пыль попадают на соленоид и прочее, и препятствуют выполнению операции торможения.
Краткое описание изобретения
Согласно одному из вариантов настоящего изобретения предлагается тормозная система для катушки с проволокой и способ торможения в машине для обвязки арматурных прутков, позволяющие улучшить характеристики торможения и экономить энергию.
Дополнительно, согласно одному из вариантов настоящего изобретения предлагается тормозной механизм для катушки с проволокой в машине для обвязки арматурных прутков с улучшенной защитой тормозного механизма от пыли.
Согласно одному из вариантов настоящего изобретения машина для обвязки арматурных прутков содержит подающее средство для подачи проволоки с катушки, установленной с возможностью вращения в корпусе машины, тормозное средство для остановки вращения катушки и управляющее средство, которое начинает торможение вращения катушки с помощью тормозного средства после подачи заранее определенной длины проволоки подающим средством.
Кроме того, торможение вращения катушки тормозным средством начинается после подачи определенной длины проволоки с катушки установленной с возможностью вращения в корпусе машины.
В вышеописанной конфигурации, поскольку тормозное средство начинает тормозить вращение катушки после подачи подающим средством заранее определенной длины проволоки, задержку при торможении катушки можно уменьшить и улучшить характеристики торможения.
Кроме того, согласно одному из вариантов настоящего изобретения, в машине для обвязки арматурных прутков, в которой проволока подается с катушки, установленной с возможностью вращения в корпусе машины, поданная проволока обматывается вокруг арматурных прутков, и обмотанная проволока скручивается для соединения арматурных прутков, при этом машина содержит тормозное средство для торможения вращения катушки с проволокой, измерительное средство для счета количества операций обвязки проволоки, соединяющей арматурные прутки, регистрирующее средство для регистрации количества операций обвязки и управляющее средство для торможения вращения катушки тормозным средством только, когда количество операций обвязки равно или менее заданного количества операций.
Дополнительно, согласно одному из вариантов настоящего изобретения, в машине для обвязки арматурных прутков, в которой проволока подается с катушки, установленной с возможностью вращения в корпусе машины, поданная проволока обматывается вокруг арматурных прутков и обмотанная проволока скручивается для соединения арматурных прутков, торможение катушки с проволокой осуществляют посредством подсчета количества операций обвязки поданной проволоки для соединения арматурных прудков, и затормаживают вращение катушки тормозным средством только когда количество операций обвязки равно или меньше заданного количества.
В вышеописанной конфигурации к катушке с проволокой прилагают тормозное усилие, только если количество операций обвязки равно или меньше заданного количества. Т.е. если указанное количество равно или больше заданной величины, торможение прекращается. Таким образом экономится энергия, срок службы источника питания подающего средства увеличивается, и источник питания подающего средства может эффективно работать длительное время.
Кроме того, согласно одному из вариантов настоящего изобретения, машина для обвязки арматурных прутков содержит подающее средство для подачи проволоки с катушки, установленной с возможностью вращения в корпусе машины, тормозное средство для торможения вращения катушки, определяющее средство для определения напряжения, которое запускает подающее средство, и управляющее средство, которое задает время начала торможения тормозным средством раньше, чем заданное время, только когда измеренное напряжение равно или превышает заданную величину.
Кроме того, согласно одному из вариантов настоящего изобретения, торможение катушки в машине для обвязки арматурных прутков осуществляют следующим способом: подают проволоку с катушки, установленной с возможностью вращения в корпусе машины подающими средствами, измеряют напряжение, приводящее в действие подающее средство, и задают время начала торможения тормозным средством для остановки вращения катушки раньше, чем заданное время, только когда измеренное напряжение равно или превышает заданное напряжение.
В вышеописанной конфигурации, если напряжение питания на подающем средстве равно заданному напряжению или превышает его, скорость подачи проволоки становится высокой. Поэтому, если момент приложения тормозного усилия к катушке не осуществить раньше пропорционально скорости подачи, то тормозное усилие будет приложено слишком поздно. Таким образом, согласно настоящему изобретению, момент приложения тормозного усилия тормозным устройством осуществляется раньше относительно заданного времени только, если напряжение на подающем средстве достигает заранее определенной величины или превышает ее. Таким образом, тормозное усилие прилагается в нужный момент времени и характеристики торможения улучшаются.
С другой стороны, если напряжение на подающем средстве ниже заданного напряжения, скорость подачи проволоки возвращается к нормальной. Таким образом, источник питания подающего средства, например, соленоида, включается на более короткое время, чем когда напряжение на подающем средстве равно заданному напряжению или превышает его, что приводит к экономии энергии. Поскольку момент приложения тормозного усилия изменяется в соответствии с напряжением на подающем средстве, вращение катушки по инерции можно надежно остановить и сократить бесполезное потребление энергии.
Далее, согласно одному или более из вариантов настоящего изобретения, машина для обвязки арматурных прутков содержит катушку, установленную с возможностью вращения в корпусе машины, тормозное средство, выполненное с возможностью зацепления с зацепляющим участком катушки, приводное средство, для привода тормозного средства, и крышку для разделения участка между приводным средством и катушкой для проволоки.
В вышеописанной конфигурации участок между приводным средством и катушкой для проволоки разделен крышкой, чтобы закрыть приводное средство от катушки. Таким образом, даже если машина для обвязки арматурных прутков используется вне помещений и т.п., операция торможения может выполняться надежно, поскольку к приводному участку не прилипает песок и т.п. То есть, загрузочные свойства катушки с проволокой не ухудшаются, и предотвращается прилипание песка и прочего к приводному участку. Поэтому, улучшается защита от пыли.
Кроме того согласно одному из вариантов настоящего изобретения, машина для обвязки арматурных прутков содержит тормозное средство, выполненное с возможностью зацепления с зацепляющим участком катушки с проволокой, установленной с возможностью вращения в корпусе машины, приводное средство, для привода тормозного средства, и поджимающее средство, подвешенное на тормозном средстве и возвращающее тормозное средство в исходное положение после зацепления тормозного средства с зацепляющим участком. Тормозное средство может содержать стопорной рычаг, выполненный с возможностью зацепления с зацепляющим участком катушки. Первый крюк поджимающего средства может быть прикреплен к корпусу машины, а второй крюк поджимающего средства может быть прикреплен к стопорному рычагу.
В вышеописанной конфигурации поджимающее средство непосредственно подвешено на тормозном средстве. Таким образом, тормозное средство может непосредственно возвращаться в исходное положение под действием поджимающего средства. То есть, потери на смещающее усилие поджимающего средства отсутствуют и к деталям, например, к приводному средству не прилагаются бесполезные усилия. Поэтому тормозное средство может эффективно возвращаться.
Другие аспекты и преимущества настоящего изобретения будут очевидны из нижеследующего описания, чертежей и формулы.
Краткое описание чертежей
Фиг.1 изображает вид в перспективе существенных частей машины для обвязки арматурных прутков по первому варианту настоящего изобретения.
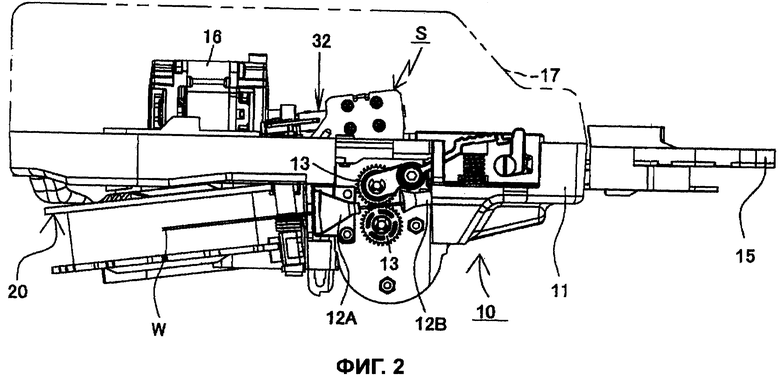
Фиг.2 изображает вид сверху машины по фиг.1.
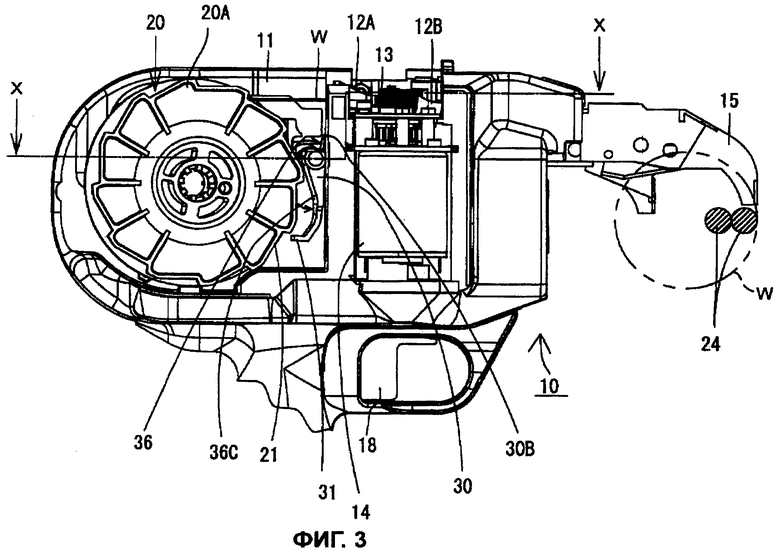
Фиг.3 изображает вид сбоку машины по фиг.1.
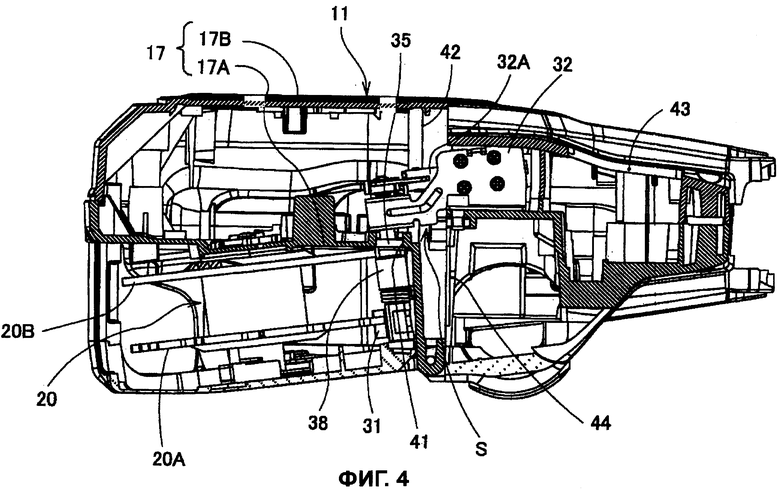
Фиг.4 изображает сечение по линии Х-Х на фиг.3.
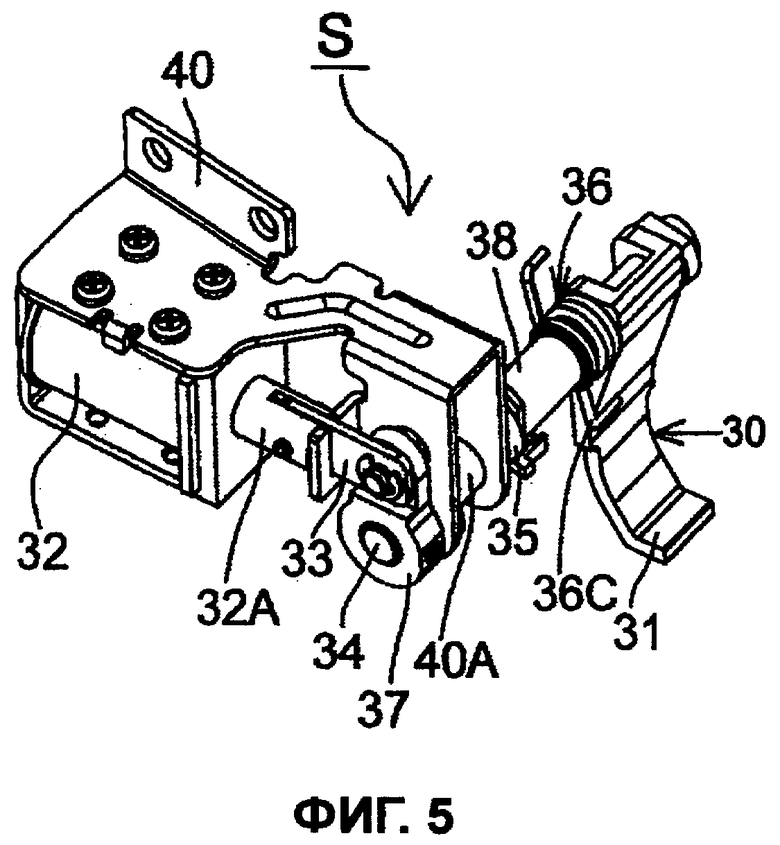
Фиг.5 изображает вид в перспективе тормозного механизма, показанного на фиг.4.
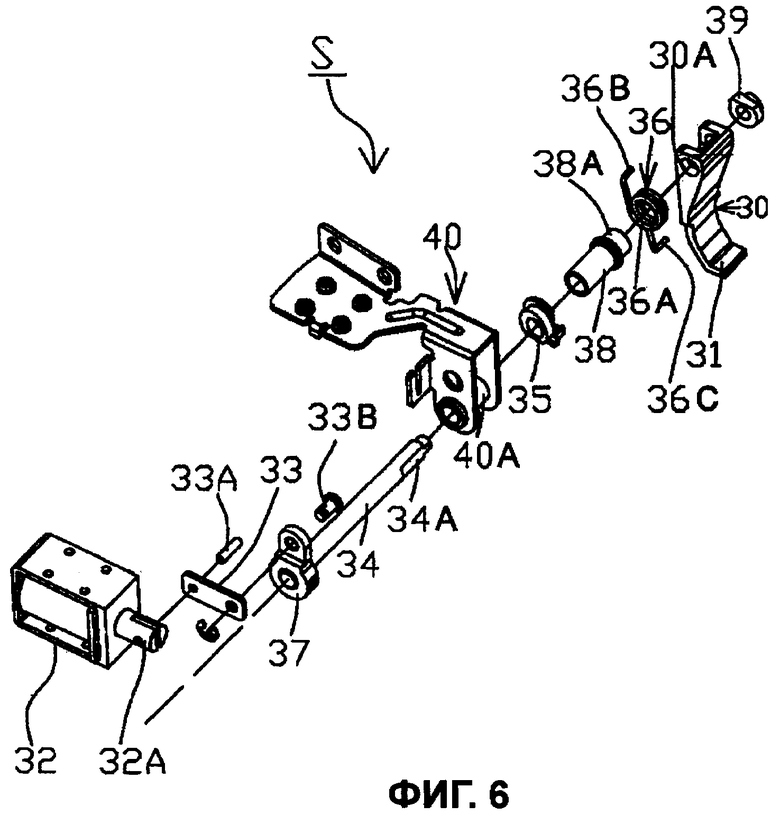
Фиг.6 изображает разнесенный вид в перспективе тормозного механизма по фиг.5.
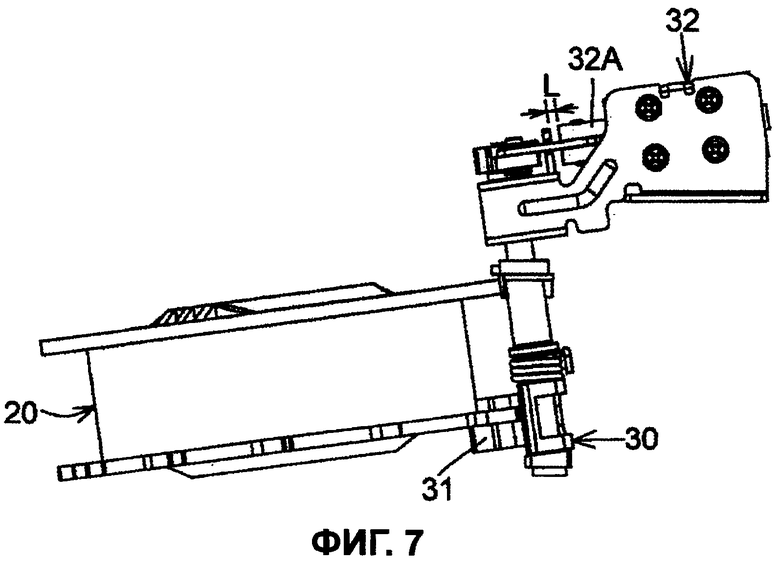
Фиг.7 изображает вид сверху существенных частей тормозного механизма по фиг.4 во время операции торможения.
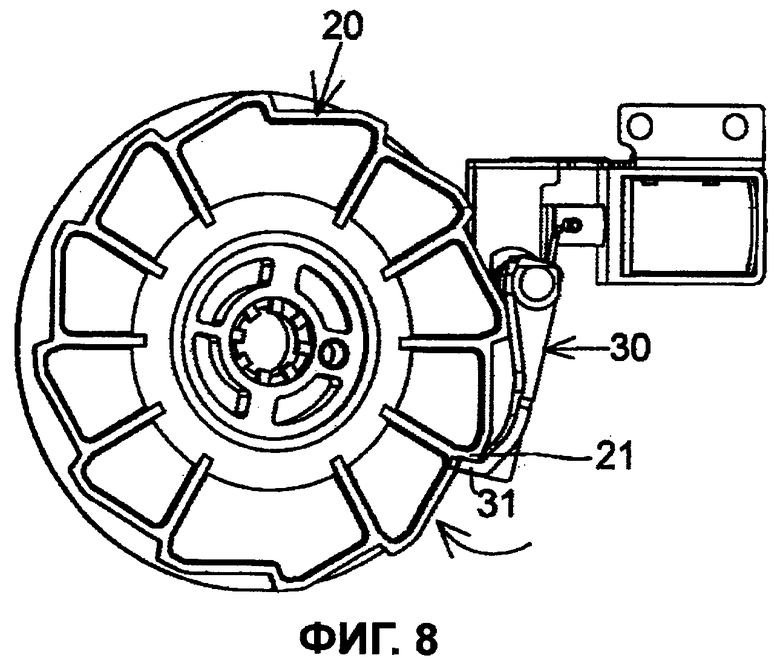
Фиг.8 изображает вид сбоку механизма по фиг.7.
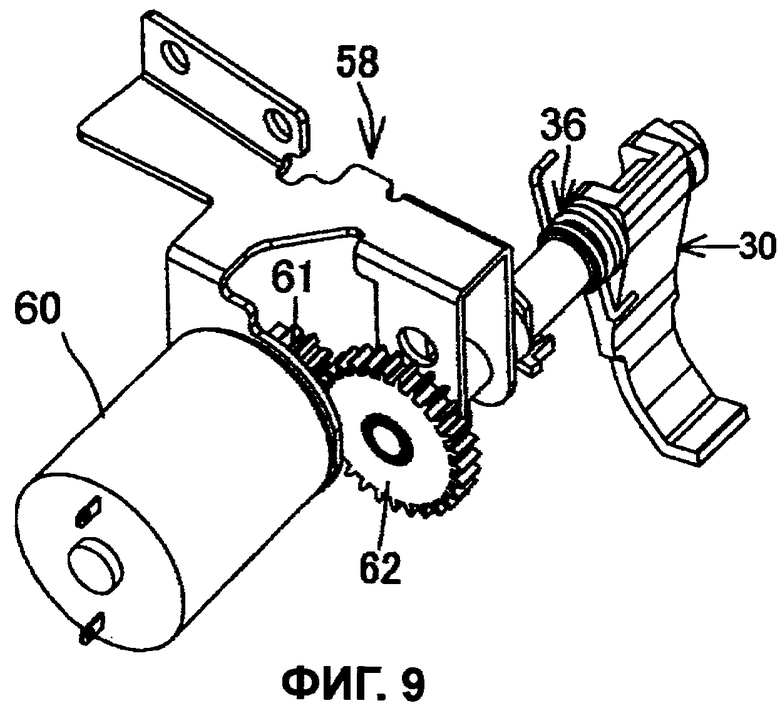
Фиг.9 изображает вид в перспективе тормозного механизма по второму варианту настоящего изобретения.
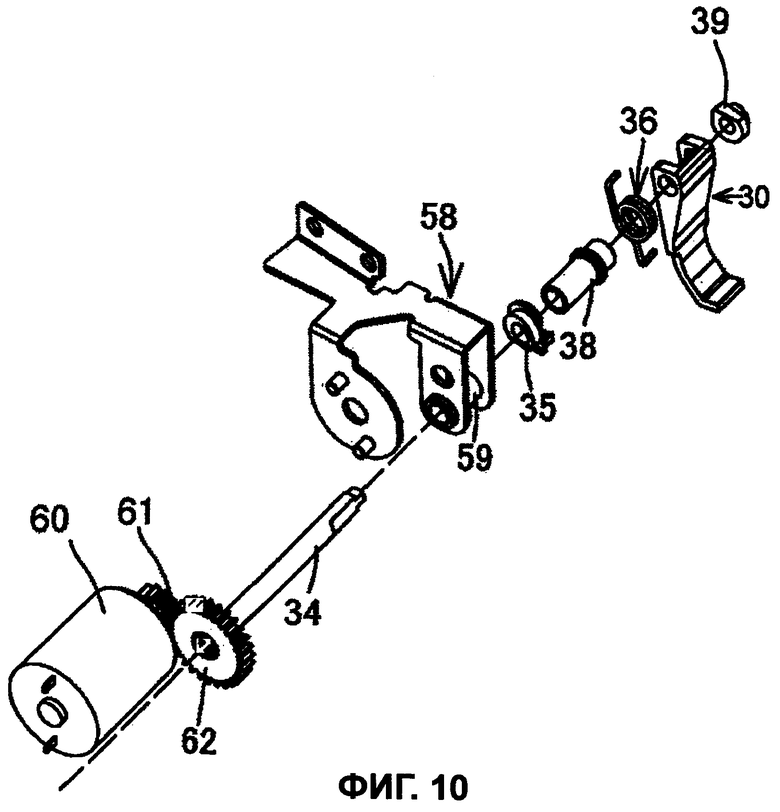
Фиг.10 изображает разнесенный вид в перспективе тормозного механизма по фиг.9.
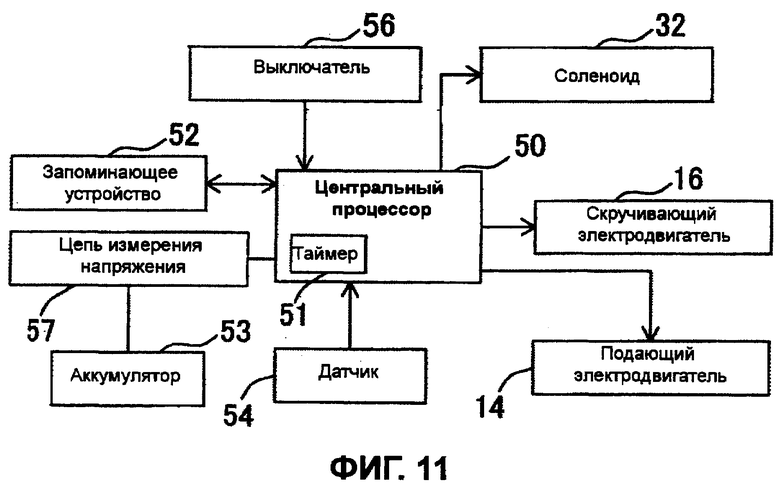
Фиг.11 изображает блок-схему машины для обвязки арматурных прутков по фиг.1.
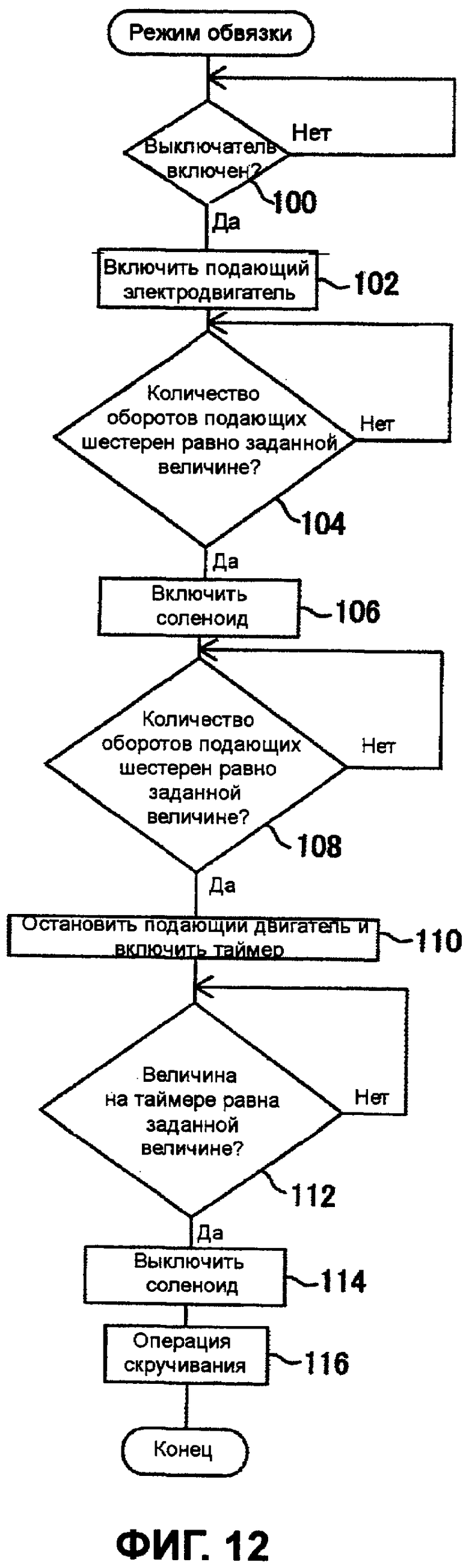
Фиг.12 изображает диаграмму последовательности режима обвязки машины по фиг.1.
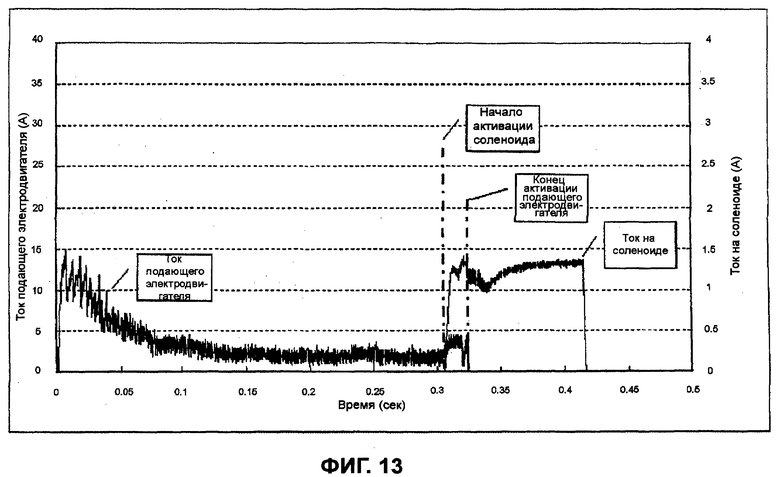
Фиг.13 изображает график срабатывания соленоида по фиг.1.
Фиг.14 изображает диаграмму последовательности режима экономии энергии машины по фиг.1.
Фиг.15 изображает диаграмму последовательности режима изменения момента торможения машины по фиг.1.
Подробное описание иллюстративных вариантов выполнения изобретения
Как показано на фиг.1-3, машина 10 для обвязки арматурных прутков содержит корпус 11 и катушку 20 с проволокой, съемно установленную в корпусе 11. Катушку можно установить и извлечь только с помощью рычага (не показан). В корпусе 11 машины выполнены каналы 12А и 12В (фиг.2 и 3) для обвязочной проволоки W. Как показано на фиг.2, между каналами 12А и 12В расположена пара подающих шестерен 13, образующих часть подающего средства, между которыми зажата проволока W. Как показано на фиг.3, в корпусе 11 машины расположен подающий электродвигатель 14, который приводит во вращение подающие шестерни 13. Кроме того, на корпусе 11 машины установлено спусковое средство 18 (фиг.3), при нажатии на который включается электродвигатель 14.
На стороне направления подачи (справа на фиг.3) корпуса 11 расположена направляющая 15, которая направляет проволоку W (показанную на фиг.3 штрихпунктирной линией), придавая ей форму петли. Дополнительно, в корпусе 11 машины установлен скручивающий электродвигатель 16, с которым соединен скручивающий крюк (не показан). Когда скручивающий электродвигатель 16 вращается, он приводит во вращение скручивающий крюк и скручивает проволочную петлю W, обмотанную вокруг множества (двух на фиг.3) арматурных прутков 24.
Скручивающий крюк выполнен с возможностью вращения в одном направлении и подачи вперед к проволочной петле W для скручивания проволоки, и с возможностью вращения в противоположном направлении, после того, как скручивание завершено, и отхода в исходное положение. Дополнительно, проволока W, которая подверглась скручиванию, обрезается отрезным устройством (не показано).
Как показано на фиг.4, катушка 20 содержит пару фланцев 20А и 20В. На одном фланце 20А сформировано множество зубчатых зацепляющих участков 21 (фиг.3). Стопорной рычаг 30, являющийся стопорным средством, расположен так, чтобы соответствовать зацепляющему участку 21. Как показано на фиг.5, тормозная система S, в которую входит стопорной рычаг 30, содержит соленоид 32, являющийся приводным средством, кулису 33, вал 34, соединительное колесо 37, торсионную спиральную пружину (далее именуемую просто "пружина") 36, пустотелый палец 38 и кронштейн 40. Кронштейн 40 крепит соленоид 32 и поддерживает вал 34. Как показано штрихпунктирной линией на фиг.2 и фиг.4, кронштейн расположен в крышке 17, которая является средством защиты от пыли корпуса 11 машины.
Как показано на фиг.5, стальной сердечник 32А соленоида 32 установлен с возможностью скольжения и, когда соленоид 32 включен, сердечник 32А втягивается в соленоид 32 (фиг.7) на длину L. Дополнительно, сердечник 32А, когда соленоид 32 выключен, удерживается в исходном положении, показанном на фиг.4. Включением и выключением соленоида 32 управляет центральный процессор 50, показанный на фиг.11.
Как показано на фиг.6, один конец сердечника 32А и тяга 33 соединены друг с другом штифтом 33А и т.п. В то же время, другой конец тяги 33, которая образует рычажный механизм, и соединительное колесо 37, прикрепленное к валу 34, соединены друг с другом штифтом 33В, и вал 34 установлен с возможностью вращения в кронштейне 49 через соединительное колесо 37. Дополнительно, вал 34 вставлен в трубчатый участок 40А кронштейна 40. Когда сердечник 32А и тяга 33 скользят, вал 34 поворачивается вокруг своей оси. Дополнительно, на конце вала 34 выполнен D-образный срезанный участок 34А.
Вал 34, выступающий из трубчатого участка 40А, вставлен в подшипник 35, пустотелый палец 38, спиральный участок 36А пружины 36, и в D-образное отверстие 30А стопорного рычага 30. Стопорной рычаг 30 или подобная деталь, зафиксирован от проскальзывания по валу 34 стопором 39.
D-образный вырезанный участок вала 34 соответствует отверстию 30А на стопорном рычаге 30, и когда вал 34 вращается, стопорной рычаг 30 вращается вокруг оси вала 34. На стопорном рычаге выполнен по существу L-образный запирающий участок 31 (фиг.3), который входит в зацепление с зацепляющим участком 21 катушки 20.
Соленоид 32, вал 34 и кронштейн 40, показанные на фиг.6, расположены под крышкой 17, показанной на фиг.2 и 4. Крышка 17 образована крышкой 17А, закрывающей одну сторону корпуса 11 машины, и крышкой 17В, закрывающей другую сторону корпуса. Пространство между крышками 17А и 17В по существу герметично уплотнено. Подшипник 35 вала 34 вставлен в отверстие 41, а другие элементы (не показаны) вставлены в отверстия 42, 43, 44. Таким образом, участок между соленоидом 32 и катушкой 20 разделен крышкой 17, и соленоид 32 и трубчатый участок 40А кронштейна 40 отделены от катушки 20 с проволокой. Дополнительно, в то время как трубчатый участок 40А кронштейна 40, в котором скользит вал 34, вращающий стопорной рычаг 34, расположен под крышкой 17 и отгорожен от внешней среды, часть вала 34, расположенная снаружи, также закрыта пустотелым пальцем 38 и подшипником 35.
Как показано на фиг.6, спиральный участок 36А пружины 36 вставлен в гнездо 38А пустотелого пальца 38, и пружина 36 поддерживается этим пустотелым пальцем 38. Как показано на фиг.3, крюк 36В пружины 36 зафиксирован на корпусе 11 машины, а крюк 36С зафиксирован на наружной части стопорного рычага 30 (фиг.5). Следовательно, пружина 36 постоянно поджимает стопорной рычаг 30 в направлении против часовой стрелки, как показано стрелкой на фиг.3.
В стопорном устройстве S между стопорным рычагом 30 и соленоидом 32, который приводит в действие стопорной рычаг 30, расположен рычажный механизм. Поэтому задержка срабатывания тормоза увеличивается по сравнению с устройством, показанным на фиг.3 патентного документа 1. Дополнительно, на фиг.1-5 показано состояние ожидания стопорного устройства S, т.е. выключенное состояние соленоида 32.
Машина 10 для обвязки арматурных прутков, как показано на фиг.11, содержит центральный процессор 50, который также выполняет функцию тактирования, запоминающее устройство 52, аккумулятор 53, датчик 54, переключатель 56, цепь 57 измерения напряжения, соленоид 32, скручивающий электродвигатель 16, и подающий электродвигатель 14. Центральный процессор 50 управляет всей работой машины 10. Например, когда от выключателя 56 на центральный процессор поступает сигнал включения, центральный процессор выполняет операцию обвязки на основания этого сигнала включения. Дополнительно, как описано выше, центральный процессор 50 содержит таймер 51, который осуществляет тактирование. Дополнительно, центральный процессор 50 является управляющим средством и подсчитывающим средством.
Программы, которые управляют различными операциями машины 10, записаны в запоминающем устройстве 52, которое является носителем информации. Например, время включения и т.п. соленоида 32 записано в запоминающем устройстве 52. Датчик 54 способен обнаруживать вращение подающих шестерен 13. То есть магнит, который вращается вместе с шестернями 13, обнаруживается датчиком Холла, который и является датчиком 54. Датчик 54 обнаруживает, что подающие шестерни 13 совершили половину оборота, и центральный процессор 50 определяет, подана ли проволока W на заранее определенную длину, например, 80 см на один оборот на основании сигнала от датчика 54 м количества оборотов подающих шестерен.
Аккумулятор 53 является источником питания для центрального процессора 50, соленоида 32, скручивающего электродвигателя 16, подающего электродвигателя 14 и т.д. Дополнительно, цепь 57 измерения напряжения, которая является средством измерения напряжения, измеряет напряжение на аккумуляторе 53 и вводит в центральный процессор 50 данные, представляющие результаты измерений. Кроме того, центральный процессор 50 сравнивает напряжение на аккумуляторе 53, представленное введенными данными с результатами измерений, с опорной величиной, записанной в запоминающем устройстве 52. Дополнительно, соединительные линии аккумулятора 53, кроме цепи 57 измерения напряжения, опущены, чтобы не усложнять схему множеством соединительных линий от соответствующих электронных устройств, таких как центральный процессор 50.
Переключатель 56 срабатывает при нажатии пускового средства 18, показанного на фиг.3, и включается. Когда переключатель 56 включается, центральный процессор 50 включает подающий электродвигатель 4 и, тем самым, вращает подающие шестерни 13 в направлении подачи проволоки W. То есть, подающий электродвигатель 14 и скручивающий двигатель 16 приводятся во вращение на основании задающего сигнала от центрального процессора 50. Дополнительно, скручивающий электродвигатель 16 выполнен с возможностью вращаться в прямом и обратном направлениях.
Дополнительно, соленоид 32 втягивает стальной сердечник 32 из исходного положения (показанного на фиг.4) на основании задающего сигнала (т.е. сигнала включения) от центрального процессора 50. Когда центральный процессор 50 не выдает задающий сигнал, соленоид 32 переходит в выключенное состояние и стопорной рычаг 30, показанный на фиг.5, возвращается в исходное положение (показанное на фиг.3) под действием пружины 36.
Вышеописанная машина работает следующим образом.
Когда нажат и сработал показанный на фиг.3 спусковой крючок 18 машины 10 для обвязки арматурных прутков, проволока W, намотанная на катушку 20, подается подающими шестернями 13 на заранее определенную длину и обматывается вокруг множества арматурных прутков 24. Затем, непосредственно перед завершением операции подачи проволоки W, включается соленоид 32 и сердечник 32А втягивается. При этом втягивании стопорной рычаг 30 поворачивается в направлении, показанном стрелкой на фиг.8 (по часовой стрелке), преодолевая поджимающее усилие пружины 36.
Следовательно, как показано на фиг.8, запирающий участок 31 стопорного рычага 30 входит в зацепление с зацепляющим участком 21 катушки 20 и останавливает вращение катушки 20. Соответственно, поскольку катушка 20 не вращается по инерции, диаметр мотка проволоки W не увеличивается и проволоку W всегда можно подавать плавно.
По истечении заранее определенного времени соленоид 32 выключается и стопорной рычаг 30 поворачивается против часовой стрелки, в направлении стрелки, показанной на фиг.3 под воздействием поджимающего усилия пружины 36, а сердечник 32А также скользит в исходное положение (фиг.4). Поскольку пружина 36 зацеплена непосредственно со стопорным рычагом 30, стопорной рычаг 30 может непосредственно возвращаться в исходное положение под действием пружины 36. Соответственно, поскольку усилие пружины 36 не растрачивается, и к деталям, например, к сердечнику 32А и т.п., не прилагается ненужное усилие, стопорной рычаг 30 можно эффективно возвращать в исходное положение.
Затем, на основании задающего сигнала центрального процессора 50, приводится в действие скручивающий электродвигатель 16, т.е. приводится в действие скручивающий крюк, и проволока W скручивается и затягивается. Кроме того, центральный процессор 50 подает задающий сигнал на скручивающий двигатель 16 после окончания операции подачи проволоки W.
Далее следует описание процесса обвязки со ссылками на диаграмму последовательности на фиг.12. Центральный процессор 50 (фиг.11) машины 10 управляет операцией обвязки по алгоритму, представленному на фиг.12. Эта программа заранее записывается в область программ запоминающего устройства 52 (фиг.11) машины 10. Дополнительно, на фиг.13 показана диаграмма синхронизации соленоида 32, показанного на фиг.1.
На стадии 100, показанной на фиг.12, происходит определение, включен ли выключатель 56 (фиг.11), т.е. при нажатии пускового средства 18, показанного на фиг.3, определяется, включен ли выключатель 56. Если результат определения положителен, т.е. если выключатель 56 включен, центральный процессор 50 на стадии 102 приводит в действие подающий электродвигатель 14. Если результат определения на стадии 100 отрицателен, центральный процессор ожидает включения выключателя 56.
На стадии 104 определяется, достигло ли количество оборотов подающих шестерен 13, показанных на фиг.2, заданной величины, т.е. заданной величины подачи для достижения заданной длины проволоки. Заданная величина является количеством оборотов, которое используется для определения, совершили ли подающие шестерни 13 то число оборотов, при котором они подают проволоку W до заранее определенной длины.
Когда датчик 54, показанный на фиг.11, обнаруживает вращение подающих шестерен 13, центральный процессор определяет, совершили ли шестерни 13 заданное число оборотов, например, семнадцать оборотов. Если результат определения на стадии 104 положителен, т.е. если количество оборотов подающих шестерен достигло заданной величины, на стадии 106 включается соленоид 32, показанный на фиг.11. Кроме того, если результат на стадии 104 отрицателен, центральный процессор ожидает, когда количество оборотов подающих шестерен достигнет заданной величины.
На стадии 108 определяется, превысило ли количество оборотов, совершенных подающими шестернями 13, заданную величину (например, семнадцать с половиной оборотов). Заданной величиной является заданное количество оборотов, которое используется для определения, совершили ли подающие шестерни 13 столько оборотов, сколько необходимо для подачи заранее определенной длины проволоки W. То есть, на стадии 108 определяется, совершили ли подающие шестерни следующий полуоборот после заданного числа оборотов (17) на стадии 104.
Если результат стадии 108 положителен, т.е. если количество оборотов подающих шестерен 13 достигло заданной величины, на стадии 110 центральный процессор 50 останавливает подающий электродвигатель 14 и начинает отсчет времени в таймере 51, показанном на фиг.11. Здесь выполняется включение соленоида 32 непосредственно перед концом подачи проволоки с учетом задержки приложения тормозного усилия к катушке 20 при активации соленоида 32. Дополнительно, если результат стадии 108 отрицателен, центральный процессор ожидает, когда количество оборотов совершенных подающими шестернями 13 достигнет заданной величины.
На стадии 112 центральный процессор 50 определяет, достигло ли время, осуществляемое таймером 51 (фиг.11) заданной величины времени прекращения торможения, например, 0,1 сек. Если результат стадии 112 положителен, т.е. отсчитанная величина совпала со временем прекращения торможения (отсчитанная величина равна 0,1 сек), на стадии 114 соленоид 32 выключается.
Кроме того, если результат стадии 112 отрицателен, центральный процессор ожидает, когда отсчитываемая величина достигнет заданного значения. Тормозное усилие прилагается к катушке 20 в течение 0,1 сек потому, что это время, необходимое для надежной остановки катушки было определено экспериментально. Кроме того, это время прекращения торможения может быть произвольно изменено на 0,08 сек, 0,12 сек и т.п., путем изменения конфигурации рычажного механизма стопорного устройства S.
На стадии 116 выполняется операция скручивания. Операция скручивания заключается во включении скручивающего электродвигателя 16 в нормальном направлении вращения и скручивании проволоки W (показана штрихпунктирной линией на фиг.3), намотанной вокруг множества арматурных прутков 24 (см. фиг.3) с помощью скручивающего крюка (не показан), после чего электродвигатель 16 приводят во вращение в обратном направлении, возвращая скручивающий крюк в исходное положение. Если операция на стадии 116 закончена, операция обвязки завершена. Кроме того, режим обвязки, показанный на фиг.12 повторяется, пока выключатель 56 включен.
Согласно данному варианту, поскольку стопорное устройство S начинает торможение вращения катушки 20 после того, как проволока W подана подающими шестернями 13 на заранее определенную величину подачи (заданное число оборотов на стадии 104) до того как будет достигнута заранее определенная длина, задержку приложения тормозного усилия к катушке 20 можно сократить и улучшить характеристики торможения.
Далее, со ссылками на диаграммы последовательности по фиг.14 и 15, приведено описание дополнительного режима экономии энергии и изменения момента торможения в машине 10.
Работа машины в режиме экономии энергии осуществляется следующим образом.
На стадии 120 на (фиг.14), определяется, включен ли выключатель 56. Если результат стадии 100 положителен, т.е. если пусковое средство 18 нажато, центральный процессор 50 на стадии 122 включает подающий электродвигатель 14. На стадии 124 из запоминающего устройства 52 (фиг.11) считывается количество операций обвязки. Здесь, что касается подсчета операций обвязки, центральный процессор 50, который является счетным средством, сбрасывает количество операций обвязки, хранящееся в оперативном участке запоминающего устройства 52, и начинает счет, каждый раз, когда катушка 20, показанная на фиг.1, устанавливается в корпус 11 машины. Дополнительно, по существу, количества проволоки W намотанной на катушку 20, хватает на 120 операций обвязки.
На стадии 126 определяется, равно ли количество операций обвязки заданной величине или меньше его, т.е. центральный процессор 50 определяет, равна ли подсчитанная величина, например, 40 или меньше. Если результат стадии 126 положителен, т.е. если подсчитанная величина равна или меньше 40, центральный процессор выполняет операцию торможения на стадии 128. Эта операция торможения аналогична соответствующей операции, показанной стадиями 104-114 на фиг.12.
После завершения операции торможения, на стадии 130 выполняется операция скручивания (та же операция, что и на стадии 116 на фиг.12). Если результат стадии 126 отрицателен, т.е. если подсчитанная величина равна 40 или более, процесс переходит на стадию 130. То есть, если результат стадии 126 отрицателен, операция торможения на стадии 128 прекращается. Операция торможения выполняется в случае, если подсчитанное количество меньше 40 потому, что разница между максимальным диаметром мотка проволоки W и диаметром внешней периферии фланцев 20А и 20В катушки 20 невелика, и, поэтому, когда катушка 20 вращается по инерции, проволока W выступает за фланцы 20А и 20В, мешая выполнению следующей операции подачи проволоки.
С другой стороны, причиной пропускания операции торможения если подсчитанное количество равно 40 или более, является то, что разница между диаметром мотка проволоки W и диаметрами внешней периферии фланцев 20А и 20В катушки 20 становится большой, и, поэтому, даже когда катушка 20 с проволокой вращается по инерции, проволока W не выступает за фланцы 20А и 20В.
По завершении операции скручивания на стадии 130, на стадии 132 подсчитывается количество операций обвязки, т.е. центральный процессор 50 увеличивает на 1 текущий результат подсчета, например, 20, тем самым устанавливая счетчик на 21. Затем, на стадии 134 подсчитанная величина, например, 21, вводится в запоминающее устройство 52. Дополнительно, эта зарегистрированная подсчитанная величина считывается на следующей стадии 124. Если операция в стадии 134 закончена, выполнение алгоритма завершено. Режим экономии энергии, показанный на фиг.14, повторяется при каждом включении выключателя 56.
В этом варианте стопорное устройство S осуществляет торможение катушки 20 с проволокой только в том случае, если количество операций обвязки, при которых проволока W подается подающими шестернями 13 на заранее определенную длину, обматывается вокруг арматурных прутков, и скручивается, равно или меньше заданной величины т.е. если результат стадии 126 положителен. Согласно данному варианту, если количество операций обвязки заданной длиной проволоки W равно заданной величине или превышает его, операция торможения не выполняется и, следовательно, экономится энергия. Поэтому, срок службы аккумулятора 53 (фиг.11) увеличивается, и его можно эффективно использовать длительное время.
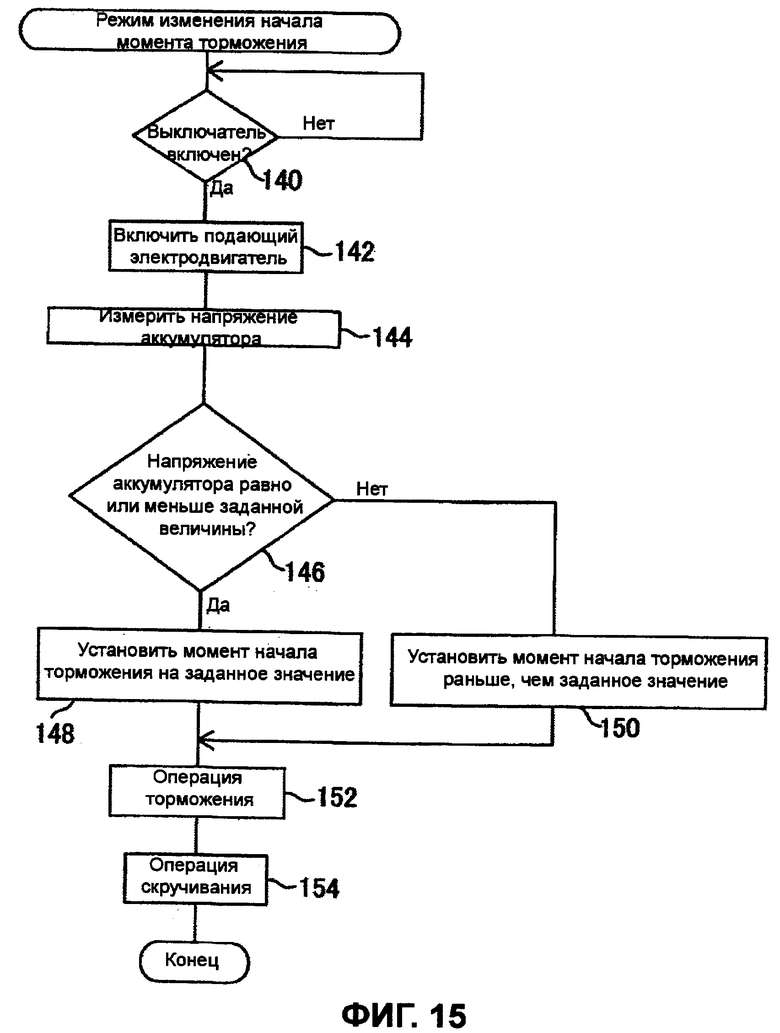
Режим изменения времени торможения осуществляется следующим образом.
На стадии 140, показанном на фиг.15, определяется, включен ли выключатель 56. Если результат стадии 140 положителен, т.е. если спусковой крючок 18 нажат, центральный процессор 50 на стадии 142 включает подающий электродвигатель. На стадии 144 центральный процессор 50 измеряет напряжение на аккумуляторе 53 с помощью измерительной цепи 57, показанной на фиг.11, т.е. центральный процессор 50 считывает данные о величине напряжения, приходящие от измерительной цепи 57. Полностью заряженный аккумулятор имеет напряжение, например, 16В (т.е. максимальное напряжение), а минимальное напряжение (т.е. напряжение, непосредственно перед отключением источника питания) задано 14,4 В. Запоминающее устройство 52, показанное на фиг.11, хранит заданную величину напряжения аккумулятора, например, 15 В, в области оперативной памяти.
На стадии 146 определяется, равно ли напряжение аккумулятора заданной величине или меньше него. Если результат стадии 146 положителен, т.е. если напряжение аккумулятора равно 15 В или меньше, на стадии 148 центральный процессор 50 задает момент включения (то же, что и момент начала торможения) соленоида 32, показанного на фиг.11, на опорную величину, например, на заданное число оборотов (17 оборотов) на стадии 104, т.е. соленоид 32 включается через 17 оборотов, и осуществляется торможение.
Если результат стадии 146 отрицателен, т.е. если напряжение аккумулятора составляет 15 В или более, на стадии 150 начало работы соленоида 32 осуществляется раньше, чем заданное число оборотов (17 оборотов). Например, для того, чтобы раньше начать торможение стопорным устройством S, чем заданное время, соленоид 32 приводится в действие при шестнадцати с половиной оборотах и осуществляет торможение.
Операция на стадии 150 предусмотрена потому, что скорость подачи проволоки W увеличивается, когда напряжение на аккумуляторе выше, чем опорная величина и, поэтому, необходимо ввести некоторое опережение для момента приложения тормозного усилия к катушке 20. В этом случае, момент прекращения подачи тока на соленоид 32 остается тем же, что и в примере, показанном на фиг.11, время включения соленоида 32 соответственно увеличивается.
С другой стороны, если напряжение аккумулятора ниже заданной величины, скорость подачи проволоки W возвращается к нормальной величине, т.е. к стандартной. Таким образом, подача тока прекращается в момент, показанный в варианте на фиг.10. То есть, поскольку время включения соленоида 32 укорачивается по сравнению со стадией 150, происходит экономия энергии. Соответственно, поскольку моменты приложения тормозного усилия изменяются в соответствии с напряжением аккумулятора, инерционное вращение катушки 20 можно надежно остановить и не допустить бесполезного потребления энергии.
После завершения операции на стадии 150 или стадии 148, на стадии 152 осуществляется операция торможения. Эта операция торможения соответствует стадиям 104-114 на фиг.12. По завершении операции торможения на стадии 152, на стадии 154 выполняется операция скручивания (соответствующая операции на стадии 116 на фиг.10). По завершении операции скручивания на стадии 154 алгоритм выполнен. Кроме того, режим изменения момента начала торможения повторяется при каждом включении выключателя 56.
В этом варианте если напряжение аккумулятора 53 равно заданной величине или превышает ее (если результат стадии 146 отрицателен), скорость подачи проволоки W увеличивается. Поэтому, если момент приложения тормозного усилия не осуществить раньше, пропорционально увеличившейся скорости, то тормозное усилие будет приложено слишком поздно. Согласно данному варианту, момент приложения тормозного усилия, прилагаемого стопорным устройством S к катушке 20, осуществляется раньше по сравнению с заданным временем только в том случае, когда напряжение аккумулятора больше или равно заданной величине. Таким образом, тормозное усилие прилагается в нужный момент и характеристики торможения улучшаются.
С другой стороны, в данном варианте, если напряжение аккумулятора ниже, чем опорная величина (если результат стадии 146 положителен), скорость подачи проволоки W возвращается к нормальной. Следовательно, соленоид 32 включается на более короткое время, чем на стадии 150, и таким образом, экономится электроэнергия. Согласно данному варианту, поскольку момент приложения тормозного усилия меняется в соответствии с напряжением аккумулятора, инерционное вращение катушки 20 можно надежно остановить и не допустить бесполезного потребления энергии.
Дополнительно, устройством, которое приводит в действие стопорной рычаг 30, может быть не соленоид 32, а электродвигатель и прочее. Дополнительно, заданная величина подачи, например, количество оборотов подающих шестерен 13, может задаваться произвольно и меняться путем изменения конфигурации рычажного механизма, который расположен между стопорным рычагом 30 и его приводом.
Дополнительно, алгоритм (фиг.12, 14 и 15) выполнения каждой программы, описанной выше, является просто примером, и может соответственно меняться, не выходя за пределы изобретательской идеи и объема настоящего изобретения. В режиме обвязки режим экономии энергии и режим изменения момента торможения можно произвольно комбинировать.
В данном варианте соленоид 32, часть вала 34 для поворота стопорного рычага 30 и кронштейн 40, показанные на фиг.6, расположены под крышкой 17, показанной на фиг.2 и 4, а скользящий участок вала 34 находится внутри трубчатого участка 40А кронштейна 40, подшипника 35 и пустотелого пальца 38. Таким образом, соленоид 32 и вал 34, поворачивающий стопорной рычаг 30, закрыты и защищены крышкой 17 и т.п.
Согласно данному варианту, участок между соленоидом 32 и катушкой перегорожен крышкой 17 и соленоид 32 закрыт. Поэтому даже если машина 10 для обвязки арматурных прутков используется вне помещения и т.п., операцию обвязки можно надежно осуществлять без прилипания песка и пыли к соленоиду 32. Соответственно, рабочие характеристики катушки с проволокой не ухудшаются. Кроме того, часть скользящего участка вала 34, расположенная снаружи от крышки 17, также закрыта пустотелым пальцем 38, подшипником 35 и прочим. Поэтому, в машине улучшена защита от пыли и прилипание пыли к скользящему участку не допускается, и операция торможения выполняется надежно. В частности, подшипник 35 прилегает к пустотелому пальцу 38 и часть вала 34 расположенная на внешней стороне подшипника 35 закрыта пустотелым пальцем 38, и подшипник 35 дополнительно защищен от прилипания песка и прочего.
Скользящий участок - это участок, который предназначен для закрывания вала 34 и не ограничен трубчатым участком 40А кронштейна 40, и подшипником 35 или пустотелым пальцем 38.
Далее со ссылками на фиг.9 и 10 приведено описание второго варианта настоящего изобретения, в котором в качестве привода используется не соленоид, а специальный электродвигатель. Детали, которые совпадают с деталями первого варианта, обозначены теми же позициями. Дополнительно, фиг.9 соответствует фиг.5 для первого варианта, а фиг.10 соответствует фиг.6 для первого варианта.
В стопорном устройстве по настоящему варианту тормозной электродвигатель (далее просто "электродвигатель") 60 прикреплен к кронштейну 58. Шестерня 61 двигателя находится в зацеплении с редукционной шестерней 62, установленной на валу 34. Дополнительно, в кронштейне 58 выполнен трубчатый участок 59, сквозь который проходит вал 34. Дополнительно, в этом варианте отсутствуют соединительные детали, такие как тяга 33 и соединительное колесо 37, показанные на фиг.6. В остальном конфигурация соответствует вариантам по фиг.5 и 6. Соответственно, в этом стопорном устройстве крышка (не показана) разделяет приводной электродвигатель 60 и катушку 20.
Согласно данному варианту, поскольку тормозной рычаг 30 может поворачиваться непосредственно под воздействием вращения редукционной шестерни 62, а электродвигатель 60 выполнен с возможностью вращаться как в прямом, так и в обратном направлении, снятие тормозного усилия происходит быстро. Дополнительно, согласно этому варианту, пружина 36, показанная на фиг.9, становится ненужной и количество деталей можно сократить. Поскольку остальные аспекты работы устройства аналогичны первому варианту, их подробное описание опускается.
Хотя выше было приведено описание конкретного иллюстративного варианта настоящего изобретения, специалистам очевидно, что в него могут быть внесены различные изменения и модификации, не выходящие за пределы настоящего изобретения. Таким образом, все такие изменения и модификации входят в изобретательскую идею и объем настоящего изобретения, определены приложенной формулой.
Промышленная применимость
Настоящее изобретение может применяться в тормозной системе и в способе торможения машины для обвязки арматурных прутков.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРНЫХ ПРУТКОВ | 2009 |
|
RU2490086C2 |
| УСТРОЙСТВО ДЛЯ ОБВЯЗКИ АРМАТУРНЫХ ПРУТКОВ | 2009 |
|
RU2499752C2 |
| Обвязочная машина | 2021 |
|
RU2807791C2 |
| МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРНЫХ ПРУТКОВ | 2009 |
|
RU2491145C2 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ, МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ВРАЩЕНИИ | 2009 |
|
RU2498874C2 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ | 2013 |
|
RU2550458C2 |
| КАТУШКА ДЛЯ ПРОВОЛОКИ, МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О ВРАЩЕНИИ | 2015 |
|
RU2597840C1 |
| МАШИНА ДЛЯ ОБВЯЗКИ АРМАТУРНЫХ ПРУТКОВ | 2009 |
|
RU2490407C2 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2675829C1 |
| ОБВЯЗОЧНАЯ МАШИНА | 2016 |
|
RU2764843C1 |

Изобретение относится к машиностроению и может быть использовано при обвязке арматурных прутков. Машина для обвязки арматурных прутков содержит подающее средство для подачи проволоки с катушки, установленной с возможностью вращения в корпусе машины, тормозное средство для торможения вращения катушки и управляющее средство, выполненное с возможностью включения торможения вращения катушки тормозным средством после подачи подающим средством проволоки определенной длины. Раскрыты конструктивные особенности тормозной системы катушки с проволокой и варианты конструктивного выполнения машины для обвязки арматурных прутков. Улучшаются характеристики торможения в машине для обвязки арматурных прутков, экономится энергия. 8 н. и 1 з.п. ф-лы, 15 ил.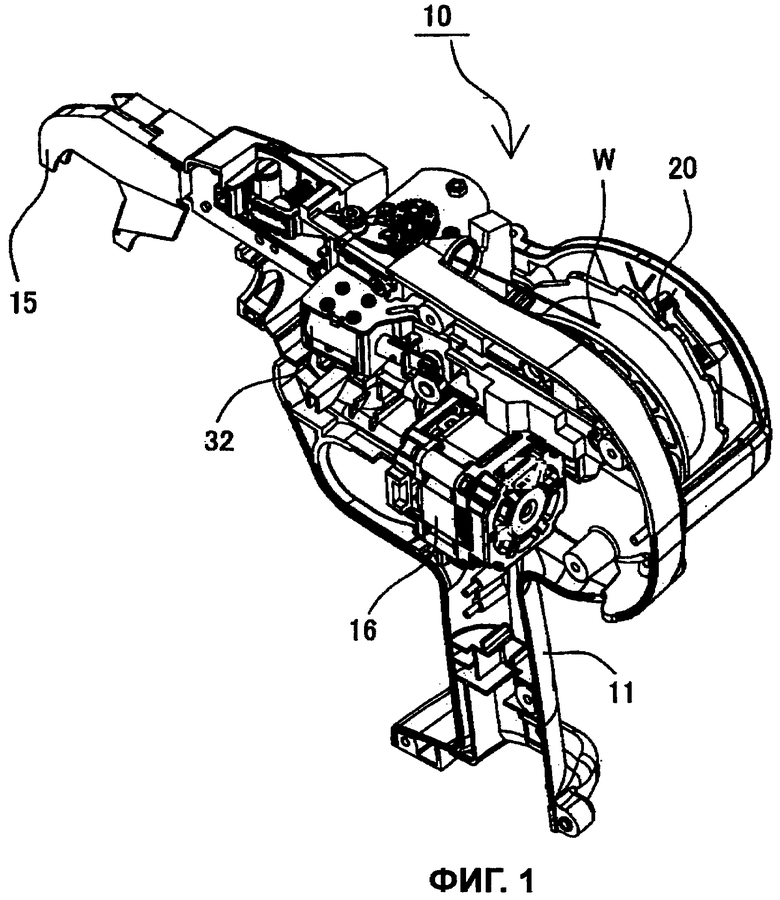
1. Машина для обвязки арматурных прутков, содержащая подающее средство (13, 14) для подачи проволоки с катушки (20), установленной с возможностью вращения в корпусе (11) машины, тормозное средство (30) для торможения вращения катушки (20) и управляющее средство, способное включать торможение катушки (20) тормозным средством (30) после подачи проволоки подающим средством (13, 14) на заранее определенную величину и до прекращения работы подающего средства (13, 14) и прекращения подачи проволоки.
2. Способ торможения катушки с проволокой в машине для обвязки арматурных прутков, при котором тормозным средством (30) начинают торможение катушки (20) с проволокой после подачи заранее определенной длины проволоки с катушки (20), установленной с возможностью вращения в корпусе (11) машины, до остановки операции подачи и прекращения подачи проволоки.
3. Машина для обвязки арматурных прутков, в которой проволока подается с катушки (20), установленной с возможностью вращения в корпусе (11) машины, обматывается вокруг арматурных прутков и обмотанная проволока скручивается для соединения арматурных прутков, содержащая тормозное средство (30) для торможения вращения катушки (20), счетное средство для подсчета количества операций обвязки, при которых поданная проволока скручивается для соединения арматурных прутков, регистрирующее средство (52) для регистрации количества операций обвязки, управляющее средство для торможения вращения катушки (20) тормозным средством (30), только когда количество операций обвязки, считанное с регистрирующего средства (52), равно или меньше заранее определенного количества операций.
4. Способ торможения катушки с проволокой в машине для обвязки арматурных прутков, в которой проволока подается с катушки (20), установленной с возможностью вращения в корпусе (11) машины, обматывается вокруг арматурных прутков и обмотанная проволока скручивается для соединения арматурных прутков, при этом способ включает счет количества операций обвязки, при которых поданная проволока скручивается для соединения арматурных прутков, и торможение вращения катушки (20) с проволокой тормозным средством (30), только когда количество циклов обвязки равно или меньше заранее определенного количества операций.
5. Машина для обвязки арматурных прутков, содержащая подающее средство (13, 14) для подачи проволоки с катушки (20), установленной с возможностью вращения в корпусе (11) машины, тормозное средство (30) для торможения вращения катушки (20) с проволокой, измерительное средство (57) для измерения напряжения, подаваемого на подающее средство (13, 14), и управляющее средство, задающее время начала торможения тормозным средством (30) раньше, чем заданное время, только когда измеренное напряжение равно или превышает определенную заданную величину.
6. Способ торможения катушки с проволокой в машине для обвязки арматурных прутков, включающий подачу подающим средством (13, 14) проволоки с катушки (20), установленной с возможностью вращения в корпусе (11) машины, измерение напряжения, питающего подающее средство (13, 14), и установку опережения времени начала торможения тормозным средством (30) для остановки вращения катушки (20) относительно заданного времени, только когда измеренное напряжение равно или превышает заданное напряжение.
7. Машина для обвязки арматурных прутков, содержащая катушку (20) с проволокой, установленную с возможностью вращения в корпусе (11) машины, тормозное средство (30), выполненное с возможностью зацепления с зацепляющим участком (21) катушки (20), приводное средство (32, 60) для привода тормозного средства (30) и крышку для разделения участка между приводным средством (32, 60) и катушкой (20) с проволокой.
8. Машина для обвязки арматурных прутков, содержащая тормозное средство (30), выполненное с возможностью зацепления с зацепляющим участком (21) катушки (20) с проволокой, установленной с возможностью вращения в корпусе (11) машины, приводное средство (32, 60) для привода тормозного средства (30) и поджимающее средство (36), закрепленное на тормозном средстве (30) и возвращающее тормозное средство (30) в исходное положение после зацепления тормозного средства (30) с зацепляющим участком (21).
9. Машина по п.8, в которой тормозное средство содержит стопорный рычаг (30), выполненный с возможностью зацепления с зацепляющим участком (21) катушки (20), причем на корпусе (11) машины закреплен первый крюк (36В) поджимающего средства (36), а на стопорном рычаге (30) закреплен второй крюк (36С) поджимающего средства (36).
| УСТРОЙСТВО ДЛЯ СВЯЗЫВАНИЯ АРМАТУРНЫХ СТЕРЖНЕЙ, БАРАБАН ДЛЯ ПРОВОЛОКИ, ИСПОЛЬЗУЕМЫЙ В ТАКОМ УСТРОЙСТВЕ, И СПОСОБ ИДЕНТИФИКАЦИИ БАРАБАНА ДЛЯ ПРОВОЛОКИ | 2004 |
|
RU2298070C2 |
| Тормозной механизм | 1986 |
|
SU1359046A1 |
| УСТРОЙСТВО ДЛЯ ПРИЛОЖЕНИЯ ЗАДАННОЙ ТОРМОЗНОЙ СИЛЫ К ДВИЖУЩЕЙСЯ СО СМАТЫВАЮЩЕЙ КАТУШКИ ПРОВОЛОКЕ | 1991 |
|
RU2011451C1 |
| Привод осциллирующего движения | 1980 |
|
SU908582A1 |
| WO 2004083559 A1, 30.09.2004. | |||

