Область техники
Изобретение относится к устройству управления стабилизатором транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами.
Уровень техники
Данная технология предлагается, например, в патентных документах 1-4. В патентном документе 1 предлагается технология управления активным стабилизатором на основе разницы в величине хода колес между правым и левым колесами и разницы скорости хода между правым и левым колесами так, чтобы обеспечивать ходовые качества во время движения по прямой, и управления активным стабилизатором так, чтобы сдерживать угол крена во время поворота. В патентном документе 2 предлагается технология вычисления моментов подавления крена, сформированных посредством активного стабилизатора и пневматической подвески, соответственно, на основе поперечного ускорения. В патентном документе 3 предлагается технология вычисления целевого угла крена транспортного средства на основе поперечного ускорения и вычисления целевого момента подавления крена, сформированного посредством управления демпфирующим усилием, и целевого момента подавления крена, сформированного посредством управления активным стабилизатором. В патентном документе 4, как и для технологии управления активным стабилизатором на основе поперечного ускорения с тем, чтобы подавлять ухудшение ходовых качеств вследствие неровности дорожного покрытия, предлагается технология блокировки стабилизатора, когда вертикальное ускорение кузова транспортного средства превышает пороговое значение.
Патентный документ 1: публикация выложенной заявки на патент Японии № 2005-238971.
Патентный документ 2: публикация выложенной заявки на патент Японии № 2006-7803.
Патентный документ 3: публикация выложенной заявки на патент Японии № 2006-256368.
Патентный документ 4: публикация выложенной заявки на патент Японии № 2007-245887.
Проблема, на решение которой направлено изобретение
Однако, поскольку технология, описанная в патентном документе 1, в основном, выполняет управление на основе разницы хода колес между правым и левым колесами, существует случай, когда на технологию оказывает влияние неровность дорожного покрытия в направлении справа налево. А именно, трудно требуемым образом подавлять крен вследствие руления и крен вследствие проезда неровностей дорожного покрытия. Дополнительно, в технологиях, описанных в патентных документах 2-4, также трудно требуемым образом подавлять как крен вследствие руления, так и крен вследствие проезда неровностей дорожного покрытия, посредством управления стабилизатором.
Настоящее изобретение разработано для устранения вышеописанной проблемы, и задачей изобретения является создание устройства управления стабилизатором транспортного средства, способного требуемым образом устранять крен вследствие руления и крен вследствие проезда неровностей дорожного покрытия и балансировать управляемость и устойчивость с ходовыми качествами.
Средство для решения проблемы
Согласно одному аспекту настоящего изобретения создано устройство управления стабилизатором транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, включающее в себя: модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной подвески из выходного сигнала датчика, установленного над пружиной подвески в транспортном средстве; и модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена.
Устройство управления стабилизатором транспортного средства выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами. Модуль получения информации об абсолютном крене получает информацию об абсолютном крене над пружиной подвески (информация означает крен на основе направления гравитационной силы), и модуль управления стабилизатором вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором. Следовательно, становится возможным управление ходовыми качествами посредством стабилизатора (активного стабилизатора) с требуемой точностью.
В устройстве управления стабилизатором транспортного средства модуль управления стабилизатором дополнительно вычисляет второй момент подавления крена на основе усилия, прилагаемого к рулевому управлению и управляет стабилизатором на основе первого момента подавления крена и второго момента подавления крена. Например, модуль управления стабилизатором устанавливает коэффициенты усиления первого момента подавления крена и второго момента подавления крена на основе угла поворота транспортного средства. Следовательно, можно выполнять управление ходовыми качествами с требуемой точностью во время поворота на неровной дороге. Таким образом, можно балансировать управляемость и устойчивость с ходовыми качествами.
В варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии с углом поворота транспортного средства. Следовательно, можно требуемым образом подавлять ухудшение ходовых качеств.
В другом варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии со скоростью транспортного средства. Следовательно, можно эффективно подавлять крен транспортного средства.
Устройство управления стабилизатором транспортного средства может дополнительно содержать модуль управления демпфирующим усилием, который выполняет управление транспортным средством в вертикальном направлении, направлении крена и продольном направлении посредством применения демпфирующего усилия, и, когда выполняется управление посредством модуля управления стабилизатором, модуль управления демпфирующим усилием увеличивает коэффициент усиления в вертикальном направлении и продольном направлении и уменьшает коэффициент усиления в направлении крена при управлении демпфирующим усилием. Следовательно, становится возможным создание системы управления стабилизатором и системы управления демпфирующим усилием, адаптированных к режиму (вверх-вниз, крен и наклон в продольном направлении), в котором соответствующие приводы полезны.
В другом варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии с временем, прошедшим от начала управления на основе первого момента подавления крена. Следовательно, можно не допускать несоответствия управления, вызванного реакцией привода.
В другом варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии со степенью передачи на кузов неровностей дорожного покрытия к передней и задней подвескам. Следовательно, можно не допускать несоответствия управления, вызванного реакцией привода.
В другом варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором может изменять величину управляющего воздействия стабилизатора на основе первого момента подавления крена в соответствии с частотой передачи на кузов неровностей дорожного покрытия к передней и задней подвескам.
В предпочтительном примере устройства управления стабилизатором транспортного средства модуль управления стабилизатором выполняет управление стабилизатором на основе первого момента подавления крена, когда частота передачи на кузов неровностей дорожного покрытия находится в пределах заданного значения, и выполняет управление стабилизатором так, чтобы устанавливать нейтральное состояние или свободное состояние, когда частота передачи на кузов неровностей дорожного покрытия превышает заданное значение. Следовательно, можно требуемым образом не допускать несоответствия управления, вызванного реакцией привода.
В предпочтительном примере устройства управления стабилизатором транспортного средства, когда передача на кузов неровностей дорожного покрытия перекрывается с частотой входного воздействия в пределах заданного значения и частотой, превышающей заданное значение, модуль управления стабилизатором выполняет первое управление стабилизатором, предоставляемое к одним из передних и задних колес, на основе первого момента подавления крена и выполняет второе управление стабилизатором, предоставляемое другим из колес, так, чтобы устанавливать нейтральное состояние или свободное состояние. Следовательно, можно требуемым образом уменьшать перекрывающееся входное воздействие и становится возможным улучшение ходовых качеств.
Предпочтительно, когда первое управление выполняется в состоянии поворота, модуль управления стабилизатором управляет стабилизатором на основе первого момента подавления крена и второго момента подавления крена, вычисленных посредством усилия, прилагаемого к рулевому управлению, и устанавливает коэффициент усиления первого момента подавления крена меньшим и устанавливает коэффициент усиления второго момента подавления крена большим, когда угол поворота транспортного средства становится больше. Следовательно, можно балансировать требуемым образом ходовые качества с управляемостью и устойчивостью без жертвования чувствительностью рулевого управления.
В другом варианте устройства управления стабилизатором транспортного средства модуль управления стабилизатором устанавливает коэффициент усиления первого момента подавления крена большим и устанавливает коэффициент усиления второго момента подавления крена меньшим, когда степень неровности дороги становится больше. Следовательно, можно интенсивно подавлять крен, вызванный неровной дорогой.
Краткое описание чертежей
Фиг.1 - схематический чертеж конфигурации транспортного средства, к которому применяется устройство управления стабилизатором транспортного средства согласно варианту осуществления изобретения.
Фиг.2A и 2B - схемы для пояснения способа вычисления пропорции распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в первом варианте осуществления изобретения.
Фиг.3 - схематический чертеж, показывающий процесс вычисления в первом варианте осуществления изобретения.
Фиг.4 - схематический чертеж, показывающий процесс вычисления во втором варианте осуществления изобретения.
Фиг.5A и 5B - схемы для пояснения способа вычисления пропорции распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в третьем варианте осуществления изобретения.
Фиг.6 - схематический чертеж, показывающий процесс вычисления в третьем варианте осуществления изобретения.
Фиг.7 - схема для пояснения способа вычисления коэффициента усиления для руления и коэффициента усиления для передачи на кузов неровностей дорожного покрытия в четвертом варианте осуществления изобретения.
Фиг.8 - блок-схема последовательности операций, показывающая процесс управления стабилизатором в четвертом варианте осуществления изобретения.
Фиг.9 - блок-схема последовательности операций, показывающая процесс управления в первом примере пятого варианта осуществления изобретения.
Фиг.10 - блок-схема последовательности операций, показывающая процесс управления во втором примере пятого варианта осуществления изобретения.
Фиг.11 - схема для пояснения способа вычисления коэффициента усиления для руления и коэффициента усиления для передачи на кузов неровностей дорожного покрытия в третьем примере пятого варианта осуществления изобретения; и
Фиг.12 - блок-схема последовательности операций, показывающая процесс управления в третьем примере пятого варианта осуществления изобретения.
Перечень ссылочных позиций
10fR, 10fL - Переднее колесо
10rR, 10rL - Заднее колесо
14 - Колесо рулевого управления
16, 18 - Устройство активного стабилизатора
16a, 18b - Привод стабилизатора
31 - Датчик угла поворота рулевого колеса
32 - Датчик скорости транспортного средства
33 - Датчик поперечного ускорения
34 - Датчик скорости крена
50 - Электронный модуль управления (ЭМУ)
Подробное описание предпочтительных вариантов осуществления изобретения
Предпочтительные варианты осуществления настоящего изобретения будут описаны далее в данном документе со ссылкой на прилагаемые чертежи.
Конфигурация транспортного средства
Сначала со ссылкой на фиг.1 будет приведено описание всей конфигурации транспортного средства, к которому применяется устройство управления стабилизатором транспортного средства согласно варианту осуществления изобретения.
Фиг.1 представляет собой схематический чертеж, показывающий конфигурацию транспортного средства. Фиг.1 является схемой транспортного средства, если смотреть сверху. Верхняя сторона показывает переднюю часть транспортного средства, а нижняя сторона показывает его заднюю часть. Дополнительно прерывистая стрелка показывает ввод/вывод сигнала.
Транспортное средство, главным образом, включает в себя передние колеса 10fR и 10fL, задние колеса 10rR и 10rL, колесо 14 рулевого управления, устройства 16, 18 активных стабилизаторов, пружины 19fR, 19fL, 19rR и 19rL подвески, различные типы датчиков 31-34 и электронный модуль управления (ЭМУ) 50. Далее в данном документе, как для симметрично размещенных компонентов, "R" и "L" применяются к ссылочным позициям, когда необходимо отличать правую сторону от левой, и "R" и "L" опускаются, когда необязательно отличать правую сторону от левой.
Мощность, формируемая двигателем, который не показан, передается передним колесам 10f и/или задним колесам 10r. Передние колеса 10fR и 10fL управляются через рулевую поперечную тягу (которая не показана) в соответствии с управлением колесом 14 рулевого управления водителем.
Устройство 16 активного стабилизатора предусмотрено между правым передним колесом 10fR и левым передним колесом 10fL, и устройство 18 активного стабилизатора предусмотрено между правым задним колесом 10rR и левым задним колесом 10rL. Устройства 16 и 18 активных стабилизаторов действуют как торсионная пружина, когда движение в направлении крена передается кузову транспортного средства (который не показан). А именно, устройства 16 и 18 активных стабилизаторов сформированы так, чтобы иметь возможность прикладывать момент подавления крена к кузову транспортного средства для того, чтобы подавлять угол крена, вызванный движением кузова транспортного средства в направлении крена.
В частности, устройство 16 активного стабилизатора, главным образом, включает в себя привод 16a стабилизатора и штанги 16bL и 16bR стабилизатора. Привод 16a стабилизатора приводит в действие пару штанг 16bL и 16bR стабилизатора при необходимости, так что штанги 16bL и 16bR стабилизатора взаимно поворачиваются в противоположном направлении, и изменяет усилие для уменьшения хода сжатия и/или отскока колес посредством скручивающего усилия, когда правое переднее колесо 10fR и левое переднее колесо 10fL ходят во взаимно противоположной фазе. Таким образом, привод 16a стабилизатора увеличивает или уменьшает момент подавления крена, прикладываемый к транспортному средству в позиции правого и левого передних колес 10f, так, чтобы выполнять регулируемое управление поперечной устойчивостью транспортного средства на стороне передних колес 10f.
Аналогичным образом, устройство 18 активного стабилизатора, главным образом, включает в себя привод 18a стабилизатора и штанги 18bL и 18bR стабилизатора. Привод 18a стабилизатора приводит в действие пару штанг 18bL и 18bR стабилизатора при необходимости, так что штанги 18bL и 18bR стабилизатора взаимно поворачиваются в противоположном направлении, и изменяет усилие для уменьшения хода сжатия и/или отскока колес посредством скручивающего усилия, когда правое заднее колесо 10rR и левое заднее колесо 10rL взаимно сжимаются и/или отскакивают после деформации в противоположной фазе. Таким образом, привод 18a стабилизатора увеличивает или уменьшает момент подавления крена, прикладываемый к транспортному средству в позиции правого и левого задних колес 10r, так, чтобы выполнять регулируемое управление поперечной устойчивостью транспортного средства на стороне задних колес 10r. Приводы 16a и 18a стабилизаторов управляются сигналом управления, предоставляемым посредством ЭМУ 50, соответственно.
Кроме того, передние колеса 10fR, 10fL и задние колеса 10rR, 10rL снабжены пружинами 19fR, 19fL, 19rR и 19rL подвески для уменьшения передачи неровностей дорожного покрытия кузову транспортного средства, соответственно.
Транспортное средство снабжено датчиком 31 угла поворота рулевого колеса, датчиком 32 скорости транспортного средства, датчиком 33 поперечного ускорения и датчиком 34 скорости крена. Датчик 31 угла поворота рулевого колеса обнаруживает угол поворота рулевого колеса в соответствии с управлением рулевым колесом 14 водителем и предоставляет в ЭМУ 50 сигнал обнаружения, соответствующий обнаруженному углу поворота рулевого колеса. Датчик 32 скорости транспортного средства обнаруживает скорость транспортного средства (скорость движения транспортного средства) и предоставляет в ЭМУ 50 сигнал обнаружения, соответствующий обнаруженной скорости транспортного средства. Датчик 33 поперечного ускорения обнаруживает поперечное ускорение (далее в данном документе соответственно называемое "боковой перегрузкой") и предоставляет в ЭМУ 50 сигнал обнаружения, соответствующий обнаруженному поперечному ускорению.
Датчик 34 скорости крена закреплен на кузове транспортного средства над пружиной (такой как пружины 19fR, 19fL, 19rR и 19rL подвески), установленной в транспортном средстве, и обнаруживает скорость крена транспортного средства. А именно, датчик 34 скорости крена функционирует в качестве модуля получения информации об абсолютном крене в настоящем изобретении и получает информацию об абсолютном крене над пружиной. Датчик 34 скорости крена 34 предоставляет в ЭМУ 50 сигнал обнаружения, соответствующий обнаруженной скорости крена. Не ограничивается то, что датчик 34 скорости крена используется в качестве модуля получения информации об абсолютном крене. Например, может быть использован датчик вертикального ускорения, который закреплен на кузове транспортного средства над пружиной. Дополнительно, в этой спецификации "абсолютный крен" означает крен на основе направления гравитационной силы.
ЭМУ 50 включает в себя центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ), которые не показаны, и выполняет различные операции управления каждым компонентом в транспортном средстве. В варианте осуществления ЭМУ 50, главным образом, вычисляет момент подавления крена, прикладываемый к транспортному средству, на основе сигналов обнаружения, предоставляемых вышеупомянутыми различными типами датчиков 31-34, и предоставляет устройствам 16 и 18 активных стабилизаторов сигнал управления, соответствующий моменту подавления крена, с тем, чтобы выполнять управление стабилизатором. Таким образом, ЭМУ 50 функционирует как модуль управления стабилизатором в настоящем изобретении.
Далее в данном документе будет приведено конкретное описание вариантов осуществления способа управления, выполняемого посредством ЭМУ 50.
Первый вариант осуществления изобретения
Далее приведено описание способа управления в первом варианте осуществления. В первом варианте осуществления ЭМУ 50 вычисляет момент подавления крена на основе скорости крена, полученной датчиком 34 скорости крена, и управляет устройствами 16 и 18 активных стабилизаторов на основе момента подавления крена. А именно на основе информации об абсолютном крене над пружиной ЭМУ 50 вычисляет момент подавления крена для подавления крена вследствие передачи на кузов неровностей дорожного покрытия (другими словами, момент подавления крена для обеспечения ходовых качеств) с тем, чтобы выполнять управление стабилизатором. Далее в данном документе вышеупомянутый момент подавления крена соответственно называется "целевым моментом подавления крена при передаче на кузов неровностей дорожного покрытия". Целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия соответствует первому моменту подавления крена в настоящем изобретении.
Дополнительно, ЭМУ 50 вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия и в то же время вычисляет момент подавления крена (далее в данном документе соответственно именуемый "целевым моментом подавления крена при рулении") на основе руления, и управляет устройствами 16 и 18 активных стабилизаторов на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и целевого момента подавления крена при рулении. Целевой момент подавления крена при рулении является моментом подавления крена для подавления крена вследствие руления и соответствует второму моменту подавления крена в настоящем изобретении. Конкретно, добавляя целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия к целевому моменту подавления крена при рулении, ЭМУ 50 вычисляет момент подавления крена, окончательно прикладываемый к транспортному средству, с тем, чтобы выполнять управление стабилизатором. Следовательно, можно соответствующим образом уменьшать крен на любой из гладкой дороги с поворотами, прямой неровной дороги и неровной дороги с поворотами.
Кроме того, ЭМУ 50 вычисляет пропорцию распределения между передними и задними колесами для распределения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в сторону передних колес 10f и в сторону задних колес 10r на основе состояния движения. В частности, ЭМУ 50 изменяет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в соответствии с углом поворота транспортного средства (например, информации о поперечном ускорении). Это обусловлено тем, что, поскольку характер поведения при крене, сформированном при рулении, также включается в информацию об абсолютном крене над пружиной, характер поведения при крене оказывает влияние на рулевые характеристики транспортного средства. Другими словами, это обусловлено тем, что оптимальная пропорция распределения между передними и задними колесами для обеспечения характеристики плавности движения, имеет тенденцию отличаться от оптимальной пропорции распределения между передними и задними колесами для обеспечения управляемости и устойчивости.
Кроме того, ЭМУ 50 изменяет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в соответствии со скоростью транспортного средства. Это обусловлено тем, что, как и для характера поведения при крене в момент отдельного движения вверх одного колеса, например, крен имеет тенденцию эффективно уменьшаться, когда пропорция распределения между передними и задними колесами задается к передней стороне во время движения с низкой скоростью, и пропорция распределения между передними и задними колесами задается к задней стороне во время движения с высокой скоростью.
Будет приведено описание конкретного примера способа вычисления пропорции распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в первом варианте осуществления со ссылкой на фиг.2A и 2B. Здесь будет приведено описание способа вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами в качестве пропорции распределения между передними и задними колесами. Фиг.2A показывает пример карты соответствия для вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами (вертикальная ось) из поперечного ускорения (горизонтальная ось). Горизонтальная ось показывает абсолютное значение поперечного ускорения. Далее в данном документе приходящаяся на передние колеса пропорция распределения между передними и задними колесами, вычисленная из поперечного ускорения, называется "первой, приходящейся на передние колеса пропорцией распределения между передними и задними колесами". Как показано на фиг.2A, первая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно небольшое значение, получается, когда поперечное ускорение невелико, и первая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно большое значение, получается, когда поперечное ускорение большое.
Фиг.2B показывает пример карты для вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами (вертикальная ось) из скорости транспортного средства (горизонтальная ось). Далее в данном документе приходящаяся на передние колеса пропорция распределения между передними и задними колесами, вычисленная из скорости транспортного средства, называется "второй, приходящейся на передние колеса пропорцией распределения между передними и задними колесами". Как показано на фиг.2B, вторая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно большое значение, получается, когда скорость транспортного средства невелика, и вторая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно небольшое значение, получается, когда скорость транспортного средства является большой.
ЭМУ 50 умножает целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия, вычисленный из скорости крена, на полученную первую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами и вторую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами с тем, чтобы распределять целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия в сторону передних колес 10f и в сторону задних колес 10r. Далее в данном документе момент, распределенный в сторону передних колес 10f, называется "приходящейся на передние колеса частью целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия", а момент, распределенный в сторону задних колес 10r, называется "приходящейся на задние колеса частью целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия".
Процесс вычисления
Далее будет приведено конкретное описание процесса вычисления в первом варианте осуществления со ссылкой на фиг.3. Фиг.3 является схематическим чертежом, показывающим процесс вычисления, выполняемый посредством ЭМУ 50 в первом варианте осуществления.
ЭМУ 50 вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия на основе скорости крена, полученной датчиком 34 скорости крена, и коэффициента Kr. Дополнительно, ЭМУ 50 вычисляет вторую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами из скорости транспортного средства со ссылкой на карту соответствия, которая показана на фиг.2B, и вычисляет первую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами из поперечного ускорения со ссылкой на карту соответствия, которая показана на фиг.2A. Затем ЭМУ 50 умножает целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия на первую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами и вторую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами с тем, чтобы вычислять приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и приходящуюся на задние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия.
Дополнительно, ЭМУ 50 вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия и в то же время вычисляет целевой момент подавления крена при рулении, на основе скорости транспортного средства, поперечного ускорения и угла поворота рулевого колеса. Затем ЭМУ 50 распределяет вычисленный целевой момент подавления крена при рулении в сторону передних колес 10f и в сторону задних колес 10r. Далее в данном документе момент, распределенный в сторону передних колес 10f, называется "приходящейся на передние колеса частью целевого момента подавления крена при рулении", а момент, распределенный в сторону задних колес 10r, называется "приходящейся на задние колеса частью целевого момента подавления крена при рулении".
Далее ЭМУ 50 вычисляет приходящуюся на передние колеса часть целевого момента подавления крена, складывая приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на передние колеса частью целевого момента подавления крена при рулении, и вычисляет приходящуюся на задние колеса часть целевого момента подавления крена, складывая приходящуюся на задние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на задние колеса частью целевого момента подавления крена при рулении. Затем ЭМУ 50 выполняет управление приводом 16a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на передние колеса часть целевого момента подавления крена применяется посредством устройства 16 активного стабилизатора, и выполняет управление приводом 18a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на задние колеса часть целевого момента подавления крена применяется посредством устройства 18 активного стабилизатора.
Посредством первого варианта осуществления можно требуемым образом подавлять крен при рулении и крен при передаче на кузов неровностей дорожного покрытия и можно балансировать управляемость и устойчивость с ходовыми качествами.
Вышеописанный вариант осуществления показывает такой пример, что пропорция распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия изменяется как на основе угла поворота транспортного средства (поперечного ускорения), так и на основе скорости транспортного средства. Пропорция распределения между передними и задними колесами может изменяться на основе только любого одного из угла поворота транспортного средства и скорости транспортного средства.
Второй вариант осуществления изобретения
Далее будет приведено описание второго варианта осуществления изобретения. Второй вариант осуществления отличается от первого варианта осуществления тем, что выполняется скоординированное управление модулем управления стабилизатором и модулем управления демпфирующим усилием. А именно, когда управление кузовом над пружиной (например, управление транспортным средством в вертикальном направлении, направлении крена и продольном направлении) выполняется посредством системы управления демпфирующим усилием в дополнение к системе управления стабилизатором (в частности, соответствующим устройствам 16 и 18 активных стабилизаторов. Они же будут применяться далее в данном документе), выполняется способ управления согласно второму варианту осуществления изобретения. Например, система управления демпфирующим усилием является амортизатором с переменным демпфирующим усилием.
В частности, во втором варианте осуществления управление в направлении крена, главным образом, выполняется системой управления стабилизатором, поскольку система управления стабилизатором может формировать активное усилие, а система управления демпфирующим усилием уменьшает степень управления в направлении крена посредством выполнения управления в направлении крена посредством системы управления стабилизатором и увеличивает степень управления в вертикальном направлении и продольном направлении. Когда выполняется такое управление стабилизатором, ЭМУ 50 увеличивает коэффициент усиления системы управления демпфирующим усилием в вертикальном направлении и продольном направлении и уменьшает коэффициент усиления системы управления демпфирующим усилием в направлении крена. Следовательно, можно создать систему управления стабилизатором и систему управления демпфирующим усилием, адаптированных к режиму (вверх-вниз, крен и наклон в продольном направлении), в котором соответствующие приводы полезны, и можно достигать более высоких ходовых качеств.
Здесь будет приведено конкретное описание процесса вычисления во втором варианте осуществления со ссылкой на фиг.4. Фиг.4 является схематическим чертежом, показывающим процесс вычисления, выполняемый посредством ЭМУ 50 согласно второму варианту осуществления изобретения.
ЭМУ 50 вычисляет вертикальную скорость в позиции центра тяжести, интегрируя вертикальное ускорение в позиции центра тяжести (полученное датчиком), и вычисляет целевое усилие для пресечения вертикальной вибрации из вертикальной скорости в позиции центра тяжести и коэффициента Kh. ЭМУ 50 вычисляет целевой момент подавления наклона в продольном направлении из скорости наклона в продольном направлении (полученной датчиком) и коэффициента Kp. Дополнительно, ЭМУ 50 вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия из скорости крена и коэффициента Kr. Затем ЭМУ 50 распределяет вычисленный целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия в момент для управления стабилизатором (далее в данном документе называемый "приходящейся на стабилизатор частью целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия") и момент для управления демпфирующим усилием (далее в данном документе называемый "частью управления демпфирующим усилием целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия"). Например, ЭМУ 50 устанавливает коэффициент усиления системы управления стабилизатором в большое значение и устанавливает коэффициент усиления системы управления демпфирующим усилием в небольшое значение. Затем ЭМУ 50 распределяет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия на основе этих коэффициентов усиления.
Далее ЭМУ 50 выполняет управление демпфирующим усилием и управление стабилизатором на основе части управления демпфирующим усилием целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и части стабилизатора целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, которые вычислены вышеупомянутым способом. Сначала будет приведено описание управления демпфирующим усилием. ЭМУ 50 выполняет операцию преобразования из позиции в режиме позиции центра тяжести в позицию каждого колеса и вычисляет целевое демпфирующее усилие для каждого колеса (правого переднего колеса 10fR, левого переднего колеса 10fL, правого заднего колеса 10rR и левого заднего колеса 10rL) на основе целевого усилия для пресечения вертикальной вибрации, целевого момента подавления наклона в продольном направлении и части управления демпфирующим усилием целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия. Затем посредством процесса приведения в действие сервомеханизма ЭМУ 50 выполняет управление приводом для управления демпфирующим усилием каждого колеса, так что целевое демпфирующее усилие прикладывается к каждому колесу.
Далее будет приведено описание управления стабилизатором. Умножая упомянутую приходящуюся на стабилизатор часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на первую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами и вторую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами, которые вычислены способом, показанным в первом варианте осуществления, ЭМУ 50 распределяет приходящуюся на стабилизатор часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в сторону передних колес 10f и в сторону задних колес 10r. Далее в данном документе момент, распределенный в сторону передних колес 10f, называется "приходящейся на стабилизатор передних колес частью целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия", а момент, распределенный в сторону задних колес 10r, называется "приходящейся на стабилизатор задних колес частью целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия".
После этого ЭМУ 50 вычисляет приходящуюся на стабилизатор передних колес часть целевого момента подавления крена, складывая приходящуюся на стабилизатор передних колес часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на передние колеса частью целевого момента подавления крена при рулении, и вычисляет приходящуюся на стабилизатор задних колес часть целевого момента подавления крена, складывая приходящуюся на стабилизатор задних колес часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на задние колеса частью целевого момента подавления крена при рулении. Приходящаяся на передние колеса часть целевого момента подавления крена при рулении и приходящаяся на задние колеса часть целевого момента подавления крена при рулении вычисляются способом, показанным в первом варианте осуществления. Затем ЭМУ 50 выполняет управление приводом 16a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на стабилизатор передних колес часть целевого момента подавления крена применяется посредством устройства 16 активного стабилизатора, и выполняет управление приводом 18a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на стабилизатор задних колес часть целевого момента подавления крена применяется посредством устройства 18 активного стабилизатора.
Посредством вышеописанного второго варианта осуществления возможно создать систему управления стабилизатором и систему управления демпфирующим усилием, адаптированных к режиму (вверх-вниз, крен и наклон в продольном направлении), в котором соответствующие приводы полезны, так что можно достичь более высоких ходовых качеств.
Третий вариант осуществления изобретения
Далее будет приведено описание третьего варианта осуществления изобретения. Третий вариант осуществления отличается от первого и второго вариантов осуществления тем, что пропорция распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия изменяется для того, чтобы уменьшать несоответствие управления, вызванное динамическими характеристиками приводов 16a и 18a стабилизаторов.
Здесь будет приведено конкретное описание несоответствия управления. Если реакция приводов 16a и 18a стабилизаторов идеальна, нет несоответствия управления в полном диапазоне частот. Однако, поскольку фактически существует ограничение скорости реакции вследствие конфигурации приводов 16a и 18a стабилизаторов, существует случай, когда характеристики ухудшаются под влиянием ограничения по сравнению со случаем, когда управление стабилизатором не выполняется. Например, хотя коэффициент резонанса при крене около 2 Гц значительно уменьшается, существует случай, когда переходные характеристики от 4 Гц до 6 Гц ухудшаются. Считается, что ухудшение, в основном, вызывается задержкой управления вследствие динамических характеристик приводов 16a и 18a стабилизаторов. Поскольку существует несоответствие управления (несоответствие рабочих характеристик) вследствие динамических характеристик приводов 16a и 18a стабилизаторов, можно сказать, что момент подавления крена должен быть распределен на передние и задние колеса, принимая во внимание состояние передачи на кузов неровностей дорожного покрытия соответствующим устройствам 16, 18 стабилизаторов передних и задних колес.
Таким образом, в третьем варианте осуществления пропорция распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия изменяется для того, чтобы соответствующим образом уменьшать несоответствие управления, вызванное динамическими характеристиками приводов 16a и 18a стабилизаторов. В частности, ЭМУ 50 изменяет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в соответствии со временем, прошедшим от начала управления, на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия. Более подробно, ЭМУ 50 устанавливает распределение между передними и задними колесами к задней стороне вскоре после начала управления и устанавливает распределение между передними и задними колесами к передней стороне после того, как проходит определенный интервал времени от начала управления.
Причина для выполнения распределения между передними и задними колесами вышеописанным образом заключается в следующем. Считается, что изменение дорожного покрытия, которое формирует перемещение над пружиной, сначала передается со стороны передних колес 10f, а затем передается к стороне задних колес 10r после времени задержки в соответствии со скоростью транспортного средства по времени. С другой стороны, поскольку в вышеописанной конфигурации пружина почти считается жестким твердым телом, предпочтительно, что требуемая величина момента подавления крена может быть сформирована на стороне передних колес 10f, а также на стороне задних колес 10r, в целом в транспортном средстве. Таким образом, поскольку предполагается, что передача неровностей дорожного покрытия формируется на стороне передних колес 10f вскоре после начала управления на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, можно увидеть, что взаимное влияние передачи на кузов неровностей дорожного покрытия и управляющего воздействия может быть пресечено посредством формирования момента подавления крена на стороне задних колес 10r. Дополнительно, поскольку предполагается, что передача неровностей дорожного покрытия формируется на стороне задних колес 10r после времени, вычисленного посредством соотношения между скоростью транспортного средства и колесной базой, в частности, после времени (далее в данном документе называемого "временем T1"), вычисленного по формуле "(колесная база)/(скорость транспортного средства в момент начала управления)", можно увидеть, что взаимное влияние передачи на кузов неровностей дорожного покрытия и управляющего воздействия пресекается посредством формирования момента подавления крена на стороне передних колес 10f. Таким образом, ЭМУ 50 устанавливает распределение между передними и задними колесами в заднюю сторону вскоре после начала управления и устанавливает распределение между передними и задними колесами к передней стороне после времени T1 от начала управления.
Дополнительно, в третьем варианте осуществления ЭМУ 50 изменяет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в соответствии со степенью передаваемых неровностей дорожного покрытия на переднюю и заднюю подвески. Конкретно, ЭМУ 50 изменяет пропорцию распределения между передними и задними колесами в соответствии с частотой передачи на кузов неровностей дорожного покрытия на переднюю и заднюю подвески. В частности, ЭМУ 50 вычисляет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на основе следующих уравнений (1)-(3).
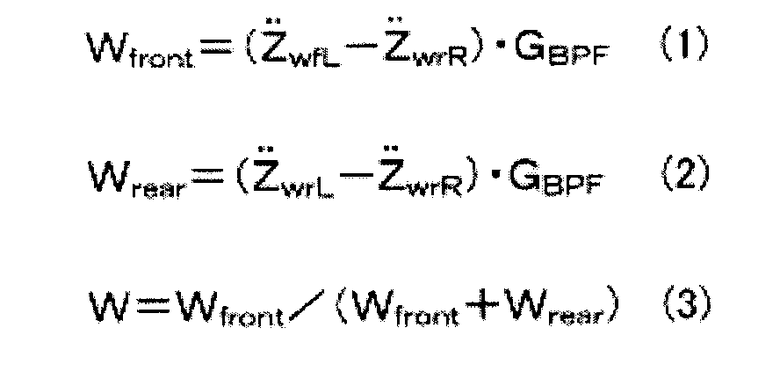
где  - вертикальное ускорение под пружиной каждого колеса, а GBPF - полосовой фильтр для вычисления указанной частоты передачи на кузов неровностей дорожного покрытия.
- вертикальное ускорение под пружиной каждого колеса, а GBPF - полосовой фильтр для вычисления указанной частоты передачи на кузов неровностей дорожного покрытия.
Сначала ЭМУ 50 получает вертикальное ускорение под пружиной каждого колеса и извлекает частоту передачи на кузов неровностей дорожного покрытия, при которой существует вероятность того, что происходит несоответствие управления, посредством полосового фильтра GBPF на основе уравнений (1) и (2). Затем ЭМУ 50 вычисляет передачи Wfront и Wrear неровностей дорожного покрытия на соответствующие подвески на стороне передних колес 10f и на стороне задних колес 10r. Например, предварительно вычисленное значение используется в качестве диапазона частот (или уровня сигнала) для передачи на кузов неровностей дорожного покрытия, в котором существует вероятность того, что происходит несоответствие управления. Далее, ЭМУ 50 вычисляет распределение W между передними и задними колесами входного компонента под пружиной из передач Wfront и Wrear неровностей дорожного покрытия на передние и задние колеса, соответственно, на основе уравнения (3). Как показано в уравнении (3), распределение W между передними и задними колесами входного компонента под пружиной соответствует приходящейся на передние колеса пропорции распределения между передними и задними колесами. Процесс вычисления посредством уравнения (3) опускается в случае деления на 0 и в микрообласти. Затем ЭМУ 50 вычисляет пропорцию распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на основе распределения W между передними и задними колесами входного компонента под пружиной. Например, ЭМУ 50 определяет пропорцию распределения между передними и задними колесами так, что коэффициент усиления системы управления на стороне, где вероятно должно произойти несоответствие управления, становится маленьким.
Далее приведено конкретное описание способа вычисления пропорции распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия в третьем варианте осуществления со ссылкой на фиг.5A и 5B. Здесь будет приведено описание способа вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами в качестве пропорции распределения между передними и задними колесами. Фиг.5A показывает пример карты соответствия для вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами (вертикальная ось) из прошедшего времени (горизонтальная ось) с начала управления на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия. Далее в данном документе приходящаяся на передние колеса пропорция распределения между передними и задними колесами, вычисленная из прошедшего времени от начала управления, называется "третьей, приходящейся на передние колеса пропорцией распределения между передними и задними колесами". Как показано на фиг.5A, третья, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно небольшое значение, получается вскоре после начала управления (третья, приходящаяся на передние колеса пропорция распределения между передними и задними колесами становится больше, когда проходит время, от начала управления до времени T1), и третья, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно большое значение, получается после времени T1 от начала управления.
Фиг.5B показывает пример карты соответствия для вычисления приходящейся на передние колеса пропорции распределения между передними и задними колесами (вертикальная ось) из распределения между передними и задними колесами входного компонента под пружиной (горизонтальная ось). Далее в данном документе приходящаяся на передние колеса пропорция распределения между передними и задними колесами, вычисленная из распределения между передними и задними колесами входного компонента под пружиной, называется "четвертой, приходящейся на передние колеса пропорцией распределения между передними и задними колесами". Как показано на фиг.5B, четвертая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно большое значение, получается, когда распределение между передними и задними колесами входного компонента под пружиной невелико, и четвертая, приходящаяся на передние колеса пропорция распределения между передними и задними колесами, имеющая относительно небольшое значение, получается, когда распределение между передними и задними колесами входного компонента под пружиной большое.
ЭМУ 50 вычисляет среднее значение третьей, приходящейся на передние колеса пропорции распределения между передними и задними колесами и четвертой, приходящейся на передние колеса пропорции распределения между передними и задними колесами, которые получены вышеописанным образом, и умножает среднее значение на целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия с тем, чтобы распределять целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия в сторону передних колес 10f и в сторону задних колес 10r. А именно ЭМУ 50 вычисляет приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и приходящуюся на задние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия.
Процесс вычисления
Далее будет приведено конкретное описание процесса вычисления в третьем варианте осуществления изобретения со ссылкой на фиг.6. Фиг.6 является схематическим чертежом, показывающим процесс вычисления, выполняемый посредством ЭМУ 50 в третьем варианте осуществления изобретения.
ЭМУ 50 вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия на основе скорости крена, полученной датчиком 34 скорости крена, и коэффициента Kr. Дополнительно ЭМУ 50 вычисляет третью, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами из прошедшего времени от начала управления со ссылкой на карту, которая показана на фиг.5A. Дополнительно ЭМУ 50 вычисляет распределение между передними и задними колесами входного компонента под пружиной из вертикального ускорения под пружиной (полученного датчиком), с помощью уравнений (1)-(3), и вычисляет четвертую, приходящуюся на передние колеса пропорцию распределения между передними и задними колесами из распределения между передними и задними колесами входного компонента под пружиной со ссылкой на карту, которая показана на фиг.5B. Затем ЭМУ 50 вычисляет среднее значение третьей, приходящейся на передние колеса пропорции распределения между передними и задними колесами и четвертой, приходящейся на передние колеса пропорции распределения между передними и задними колесами, которые получены вышеописанным образом, и умножает среднее значение на целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия с тем, чтобы вычислять приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и приходящуюся на задние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия.
Далее ЭМУ 50 вычисляет приходящуюся на передние колеса часть целевого момента подавления крена, складывая приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на передние колеса частью целевого момента подавления крена при рулении, и вычисляет приходящуюся на задние колеса часть целевого момента подавления крена, складывая приходящуюся на задние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на задние колеса частью целевого момента подавления крена при рулении. Приходящаяся на передние колеса часть целевого момента подавления крена при рулении и приходящаяся на задние колеса часть целевого момента подавления крена при рулении вычисляются способом, показанным в первом варианте осуществления. Затем ЭМУ 50 выполняет управление приводом 16a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на передние колеса часть целевого момента подавления крена применяется посредством устройства 16 активного стабилизатора, и выполняет управление приводом 18a стабилизатора посредством процесса приведения в действие сервомеханизма так, что приходящаяся на задние колеса часть целевого момента подавления крена применяется посредством устройства 18 активного стабилизатора.
Посредством третьего варианта осуществления можно соответствующим образом уменьшать несоответствие управления, вызванное динамическими характеристиками приводов 16a и 18a стабилизаторов.
Вышеописанный вариант осуществления показывает такой пример, что пропорция распределения между передними и задними колесами целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия изменяется на основе прошедшего времени от начала управления и распределения между передними и задними колесами входного компонента под пружиной, но она не ограничивается этим. Пропорция распределения между передними и задними колесами может быть изменена на основе не только прошедшего времени от начала управления и распределения между передними и задними колесами входного компонента под пружиной, но также и угла поворота транспортного средства (поперечного ускорения) и скорости транспортного средства, которые показаны в первом варианте осуществления. Дополнительно вместо использования всего этого пропорция распределения между передними и задними колесами может быть изменена на основе не менее чем одного из прошедшего времени от начала управления, распределения между передними и задними колесами входного компонента под пружиной, угла поворота транспортного средства и скорости транспортного средства.
Кроме того, третий вариант осуществления также может быть применен к системе, включающей в себя систему управления демпфирующим усилием, которая показана во втором варианте осуществления. В этом случае, когда выполняется управление стабилизатором в третьем варианте осуществления, коэффициент усиления системы управления демпфирующим усилием в вертикальном направлении и продольном направлении может быть увеличен, а коэффициент усиления системы управления демпфирующим усилием в направлении крена может быть уменьшен.
Четвертый вариант осуществления изобретения
Далее будет приведено описание четвертого варианта осуществления. В вышеописанных с первого по третий вариантах осуществления целевой момент подавления крена вычисляется только посредством сложения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении. Подробно, приходящаяся на передние колеса часть целевого момента подавления крена вычисляется посредством сложения приходящейся на передние колеса части целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на передние колеса частью целевого момента подавления крена при рулении, а приходящаяся на задние колеса часть целевого момента подавления крена вычисляется посредством сложения приходящейся на задние колеса части целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с приходящейся на задние колеса частью целевого момента подавления крена при рулении. Однако в четвертом варианте осуществления вес в случае сложения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении изменяется в соответствии с состоянием дорожного покрытия. А именно, в четвертом варианте осуществления взвешенное сложение целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении выполняется в соответствии с состоянием дорожного покрытия.
Причина этого заключается в следующем. Обычно существует верхнее ограничение величины управляющего воздействия системы управления стабилизатором, например, вследствие потребляемого тока. В этом случае, если рулевое колесо 14 поворачивается во время езды по неровной дороге (такое состояние, когда величина управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия становится большой), например, существует случай, когда величина управляющего воздействия для пресечения крена вследствие руления (а именно величина управляющего воздействия для пресечения крена вследствие поперечного ускорения) становится большой, и величина управляющего воздействия превышает величину управляющего воздействия системы управления стабилизатором. Следовательно, поскольку величина управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия не может достаточно обеспечиваться, и становится трудно подавлять крен вследствие передачи на кузов неровностей дорожного покрытия, существует вероятность того, что ходовые качества ухудшаются по сравнению с целевыми. С другой стороны, если фиксированное значение распределения величины управляющего воздействия для пресечения крена вследствие руления и величины управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия определяется на основе верхнего ограничения величины управляющего воздействия системы управления стабилизатором, существует случай, когда величина управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия ограничивается, например, даже если величина управляющего воздействия для пресечения крена вследствие руления не используется вовсе. Следовательно, существует случай, когда величина управляющего воздействия для пресечения крена вследствие руления пропадает впустую.
Таким образом, в четвертом варианте осуществления взвешенное сложение целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении выполняется в соответствии с состоянием дорожного покрытия. В частности, ЭМУ 50 вычисляет коэффициент усиления системы управления (далее в данном документе именуемый "коэффициентом усиления для передачи на кузов неровностей дорожного покрытия), используемый для целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, и коэффициент усиления системы управления (далее в данном документе именуемый "коэффициентом усиления для руления"), используемый для целевого момента подавления крена при рулении, на основе степени неровности дороги. Затем ЭМУ 50 складывает значение, вычисленное посредством умножения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия, со значением, вычисленным посредством умножения целевого момента подавления крена при рулении, на коэффициент усиления системы управления для руления, с тем, чтобы вычислять целевой момент подавления крена.
В частности, когда степень неровности дороги становится больше, ЭМУ 50 устанавливает коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия большим и устанавливает коэффициент усиления системы управления для руления меньшим. Другими словами, когда степень неровности дороги становится меньше, ЭМУ 50 устанавливает коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия меньшим и устанавливает коэффициент усиления системы управления для руления большим. Например, ЭМУ 50 оценивает состояние дорожного покрытия (степень неровности дороги) на основе выходного сигнала датчика вертикального ускорения над пружиной.
Здесь будет приведено описание конкретного примера способа вычисления коэффициента усиления системы управления для руления, и коэффициента усиления системы управления для передачи на кузов неровностей дорожного покрытия в четвертом варианте осуществления, со ссылкой на фиг.7. Фиг.7 показывает карту для вычисления коэффициента усиления системы управления (вертикальная ось) из степени неровности дороги (горизонтальная ось). Коэффициент усиления системы управления имеет значение от 0 до 100(%). В частности, карта G11, показанная сплошной линией, показывает пример соответствия для вычисления коэффициента усиления системы управления для руления, а карта G12, показанная прерывистой линией, показывает пример соответствия для вычисления коэффициента усиления для передачи на кузов неровностей дорожного покрытия. Как показано на фиг.7, может быть понятно, что коэффициент усиления системы управления для руления становится меньшим, а коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия становится большим, когда степень неровности дороги становится больше. Другими словами, может быть понятно, что коэффициент усиления системы управления для руления становится больше, а коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия становится меньше, когда степень неровности дороги становится меньше, а именно, когда степень гладкой дороги становится больше.
Далее будет приведено описание процесса управления стабилизатором в четвертом варианте осуществления со ссылкой на фиг.8. Процесс многократно повторяется посредством ЭМУ 50.
Сначала, на этапе S101, ЭМУ 50 вычисляет целевой момент подавления крена при рулении и целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия. В частности, ЭМУ 50 вычисляет целевой момент подавления крена при рулении на основе скорости транспортного средства, поперечного ускорения и угла поворота рулевого колеса и вычисляет целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия на основе скорости крена. Затем ЭМУ 50 распределяет эти моменты подавления крена к передним и задним колесам. В частности, на основе способа, показанного в первом варианте осуществления и/или третьем варианте осуществления, ЭМУ 50 вычисляет приходящуюся на передние колеса часть целевого момента подавления крена при рулении и приходящуюся на задние колеса часть целевого момента подавления крена при рулении, которые получены посредством распределения целевого момента подавления крена при рулении на передние и задние колеса, и вычисляет приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и приходящуюся на передние колеса часть целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, которые получены посредством распределения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на передние и задние колеса. Затем процесс переходит к этапу S102.
На этапе S102 ЭМУ 50 оценивает степень неровности дороги на основе вертикального ускорения, например, над пружиной, и вычисляет коэффициент усиления системы управления для руления и коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия на основе степени неровности дороги. Например, ЭМУ 50 получает эти коэффициенты усиления со ссылкой на соответствие, которое показано на фиг.7. Затем процесс переходит к этапу S103.
На этапе S103 ЭМУ 50 выполняет взвешенное сложение целевого момента подавления крена при рулении, с целевым моментом подавления крена при передаче на кузов неровностей дорожного покрытия на основе коэффициента усиления системы управления для руления и коэффициента усиления для проезда неровностей дорожного покрытия с тем, чтобы вычислять целевой момент подавления крена. В частности, ЭМУ 50 добавляет значение, вычисленное посредством умножения приходящейся на передние колеса части целевого момента подавления крена при рулении на коэффициент усиления для руления, к значению, вычисленному посредством умножения приходящейся на передние колеса части целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на коэффициент усиления при передаче на кузов неровностей дорожного покрытия, с тем, чтобы вычислять приходящуюся на передние колеса часть целевого момента подавления крена. Дополнительно ЭМУ 50 добавляет значение, вычисленное посредством умножения приходящейся на задние колеса части целевого момента подавления крена при рулении на коэффициент усиления для руления, к значению, вычисленному посредством умножения приходящейся на задние колеса части целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия на коэффициент усиления при передаче на кузов неровностей дорожного покрытия, с тем, чтобы вычислять приходящуюся на задние колеса часть целевого момента подавления крена. Затем процесс переходит к этапу S104.
На этапе S104 ЭМУ 50 выполняет управление приводами 16a и 18a стабилизаторов на основе целевого момента подавления крена (приходящейся на передние колеса части целевого момента подавления крена и приходящейся на задние колеса части целевого момента подавления крена), полученного на этапе S103. Затем процесс заканчивается.
Посредством четвертого варианта осуществления можно максимально улучшать ходовые качества во время движения по неровной дороге (такое состояние, когда величина управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия становится большой), даже если существует верхнее ограничение величины управляющего воздействия системы управления стабилизатором. Кроме того, посредством четвертого варианта осуществления эффективность подавления крена вследствие руления не снижается на гладкой дороге.
В четвертом варианте осуществления, когда целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия распределяется на передние и задние колеса, пропорция распределения между передними и задними колесами также может изменяться на основе не менее чем одного из угла поворота транспортного средства, скорости транспортного средства, времени, прошедшего от начала управления и распределения между передними и задними колесами входного компонента под пружиной, как показано в первом и третьем варианте осуществления.
Кроме того, четвертый вариант осуществления также может быть применен к системе, включающей в себя систему управления демпфирующим усилием, которая показана во втором варианте осуществления.
Пятый вариант осуществления изобретения
Далее будет приведено описание пятого варианта осуществления изобретения. Пятый вариант осуществления отличается от описанных с первого по четвертый вариантов осуществления тем, что величина управляющего воздействия для пресечения крена вследствие передачи на кузов неровностей дорожного покрытия изменяется в соответствии с частотой передачи на кузов неровностей дорожного покрытия. В частности, для того, чтобы соответствующим образом уменьшить передачу неровностей дорожного покрытия на неровной дороге, ЭМУ 50 изменяет коэффициент усиления целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, когда выполняется управление стабилизатором.
Далее в данном документе будет приведено конкретное описание с первого по третий примеров способа управления в пятом варианте осуществления.
Первый пример
В первом примере на неровной дороге ЭМУ 50 выполняет управление стабилизатором на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия, когда частота передачи на кузов неровностей дорожного покрытия находится в пределах заданного значения, и выполняет управление приводами 16a и 18a стабилизаторов так, чтобы устанавливать нейтральное состояние или свободное состояние, когда частота передачи на кузов неровностей дорожного покрытия превышает заданное значение.
В частности, когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования приводов 16a и 18a стабилизаторов (например, когда частота равна от 1 Гц до 4 Гц), ЭМУ 50 выполняет управление стабилизатором (далее в данном документе именуемое "управлением для недопущения ударов на неровной дороге") на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия для того, чтобы соответствующим образом не допускать ударов при передаче на кузов неровностей дороги. В таком случае ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге на основе входного воздействия под пружиной без выполнения управления на основе целевого момента подавления крена при рулении. В отличие от этого, когда частота передачи на кузов неровностей дорожного покрытия превышает диапазон реагирования приводов 16a и 18a стабилизаторов (например, когда частота превышает 6 Гц), ЭМУ 50 выполняет управление (далее в данном документе называемое "свободным управлением") приводами 16a и 18a стабилизаторов так, чтобы устанавливать нейтральное состояние (другими словами, фиксацию N-точки) или свободное состояние без выполнения управления для недопущения ударов на неровной дороге.
Причина для выполнения управления заключается в следующем. Если реакция приводов 16a и 18a стабилизаторов идеальна, нет несоответствия управления в полном диапазоне частот. Однако поскольку, фактически, существует ограничение реакции вследствие конфигурации приводов 16a и 18a стабилизаторов, существует вероятность того, что эффект управления посредством целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия недостаточно достигается, когда вводится высокая частота, превышающая диапазон реагирования. С другой стороны, если управление стабилизатором для пресечения крена выполняется на дорожных покрытиях, имеющих много передаваемых неровностей, таких как неровная дорога, существует случай, когда передача неровностей подвеске становится слишком большой, и ходовые качества ухудшаются. Следовательно, когда неровности передаются с высокой частотой, превышающей диапазон реагирования, считается, что лучше выполнять управление настройкой угла привода приводов 16a и 18a стабилизаторов к фиксации в N-точке, чтобы выполнять управление посредством целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия.
Таким образом, считается, что выполнение управления стабилизатором на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия является эффективным, когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования приводов 16a и 18a стабилизаторов, и считается, что настройка приводов 16a и 18a стабилизаторов на фиксацию в N-точке или в свободное состояние является эффективной, когда частота передачи на кузов неровностей дорожного покрытия превышает диапазон реагирования. Таким образом, в пятом варианте осуществления ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге, когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования приводов 16a и 18a стабилизатора, и выполняет свободное управление, когда частота передачи на кузов неровностей дорожного покрытия превышает диапазон реагирования. Следовательно, возможно требуемым образом уменьшать передачу неровностей дорожного покрытия на неровной дороге, и становится возможным улучшение ходовых качеств.
Фиг.9 иллюстрирует блок-схему последовательности операций процесса управления согласно первому примеру пятого варианта осуществления изобретения. Процесс многократно повторяется посредством ЭМУ 50.
Сначала, на этапе S201, ЭМУ 50 определяет, является ли дорога неровной дорогой или нет. В частности, ЭМУ 50 определяет, действительно ли частота передачи на кузов неровностей дорожного покрытия равна или превышает заданное значение. Заданное значение соответствует частоте, которая выше, чем полоса частот в диапазоне реагирования приводов 16a и 18a стабилизаторов.
Когда дорога является неровной дорогой (этап S201; Да), процесс переходит к этапу S202. В отличие от этого, когда дорога не является неровной дорогой (этап S201; Нет), процесс переходит к этапу S205. На этапе S205 ЭМУ 50 выполняет управление стабилизатором на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия или свободное управление как обычно (далее в данном документе управление, выполняемое на этапе S205, называется "обычным управлением"). Затем процесс заканчивается.
На этапе S202 ЭМУ 50 определяет, находится или нет частота передачи на кузов неровностей дорожного покрытия в диапазоне реагирования приводов 16a и 18a стабилизаторов. Например, ЭМУ 50 оценивает входной компонент под пружиной на основе выходных сигналов датчика вертикального ускорения под пружиной, датчика вертикального ускорения над пружиной и датчика скорости вращения колеса с тем, чтобы выполнять определение.
Когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования (этап S202; Да), процесс переходит к этапу S203. В этом случае ЭМУ 50 выполняет управление стабилизатором на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия для того, чтобы соответствующим образом избегать передачи на кузов неровностей неровной дороги, а именно, ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге (этап S203). Затем процесс заканчивается.
В отличие от этого, когда частота передачи на кузов неровностей дорожного покрытия не находится в диапазоне реагирования (этап S202; Нет), процесс переходит к этапу S204. В этом случае ЭМУ 50 выполняет управление приводами 16a и 18a стабилизатора так, чтобы устанавливать нейтральное значение (другими словами, фиксацию N-точки) или свободное состояние, а именно ЭМУ 50 выполняет свободное управление (этап S204). Затем процесс заканчивается.
Посредством описанного процесса можно требуемым образом уменьшать передачу неровностей дорожного покрытия на неровной дороге и улучшать ходовые качества.
Второй пример
Далее будет приведено конкретное описание второго примера способа управления в пятом варианте осуществления изобретения. Во втором примере, когда передача неровностей дорожного покрытия перекрывается с частотой в диапазоне реагирования приводов 16a и 18a стабилизаторов и частотой, превышающей диапазон реагирования на неровной дороге, ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге любым одним из привода 16a стабилизатора на стороне передних колес 10f и привода 18a стабилизатора на стороне задних колес 10r и выполняет свободное управление другим (далее в данном документе это управление называется "перекрывающим управлением на неровной дороге"). Следовательно, когда передача неровностей дорожного покрытия перекрывается с частотой в диапазоне реагирования и с частотой, превышающей диапазон реагирования, можно соответствующим образом уменьшать оба входных воздействия и улучшать ходовые качества.
В перекрывающемся управлении на неровной дороге управление для недопущения ударов на неровной дороге любым одним из привода 16a стабилизатора на стороне передних колес 10f и привода 18a стабилизатора на стороне задних колес 10f соответствует первому управлению, а свободное управление другим - второму управлению.
Фиг.10 является блок-схемой последовательности операций, показывающей процесс управления во втором примере пятого варианта осуществления изобретения. Процесс многократно повторяется посредством ЭМУ 50.
Сначала, на этапе S301, ЭМУ 50 определяет, является ли дорога неровной дорогой или нет. Когда дорога является неровной дорогой (этап S301; Да), процесс переходит к этапу S302. В отличие от этого, когда дорога не является неровной дорогой (этап S301; Нет), процесс переходит к этапу S307. В этом случае ЭМУ 50 выполняет вышеописанное обычное управление (этап S307), и процесс заканчивается.
На этапе S302 ЭМУ 50 определяет, находится или нет частота передачи на кузов неровностей дорожного покрытия в диапазоне реагирования приводов 16a и 18a стабилизаторов. Когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования (этап S302; Да), процесс переходит к этапу S303. В отличие от этого, когда частота передачи на кузов неровностей дорожного покрытия не находится в диапазоне реагирования (этап S302; Нет), процесс переходит к этапу S306. В этом случае ЭМУ 50 выполняет свободное управление (этап S306), и процесс заканчивается.
На этапе S303 ЭМУ 50 определяет, перекрывается или нет передача неровностей дорожного покрытия с частотой в диапазоне реагирования приводов 16a и 18a стабилизаторов и частотой, превышающей диапазон реагирования (далее в данном документе определение называется "определением перекрытия входных воздействий"). Например, ЭМУ 50 оценивает входной компонент под пружиной на основе выходных сигналов датчика вертикального ускорения под пружиной, датчика вертикального ускорения над пружиной и датчика скорости вращения колеса с тем, чтобы выполнять определение.
Когда условие определения перекрывания входных воздействий удовлетворяется (этап S303; Да), процесс переходит к этапу S304. В этом случае ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге любым одним из привода 16a стабилизатора на стороне передних колес 10f и привода 18a стабилизатора на стороне задних колес 10r и выполняет свободное управление другим, а именно ЭМУ 50 выполняет перекрывающее управление на неровной дороге (этап S304). Затем процесс заканчивается.
В отличие от этого, когда условие определения перекрывания входных воздействий не удовлетворяется (этап S303; Нет), процесс переходит к этапу S305. В этом случае ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге, как показано в первом примере (этап S305), и процесс заканчивается.
Посредством этого процесса, когда передача неровностей дорожного покрытия перекрывается с частотой в диапазоне реагирования и с частотой, превышающей диапазон реагирования, можно соответствующим образом уменьшать оба входных воздействия и улучшать ходовые качества.
Третий пример
Далее будет приведено конкретное описание третьего примера способа управления в пятом варианте осуществления изобретения. В третьем примере, даже когда передача неровностей дорожного покрытия перекрывается с частотой в диапазоне реагирования и с частотой, превышающей диапазон реагирования на неровной дороге, в случае состояния поворота ЭМУ 50 не выполняет управление для недопущения ударов на неровной дороге любым из привода 16a стабилизатора на стороне передних колес 10f и привода 18a стабилизатора на стороне задних колес 10r. А именно, в случае состояния поворота ЭМУ 50 не выполняет перекрывающее управление на неровной дороге, как показано во втором примере. В частности, вместо управления для недопущения ударов на неровной дороге ЭМУ 50 выполняет управление стабилизатором любого одного из привода 16a стабилизатора на стороне передних колес 10f и привода 18a стабилизатора на стороне задних колес 10r на основе целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия и целевого момента подавления крена при рулении. ЭМУ 50 выполняет свободное управление другим приводом так, чтобы устанавливать фиксацию N-точки или свободное состояние. В частности, в соответствии с состоянием транспортного средства и целью ЭМУ 50 вычисляет целевой момент подавления крена, выполняя взвешенное сложение целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении, так, чтобы выполнять управление стабилизатором. Далее в данном документе такое управление называется "перекрывающим управлением во время поворота".
В этом случае способом, аналогичным четвертому варианту осуществления, ЭМУ 50 вычисляет коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия и коэффициент усиления для руления, на основе угла поворота транспортного средства (например, поперечного ускорения и угла поворота рулевого колеса) и складывает значение, вычисленное посредством умножения коэффициента усиления для передачи на кузов неровностей дорожного покрытия на целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия, со значением, вычисленным посредством умножения коэффициента усиления для руления на целевой момент подавления крена при рулении, с тем, чтобы вычислять целевой момент подавления крена. Например, когда поперечное ускорение становится больше, ЭМУ 50 устанавливает коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия меньшим и устанавливает коэффициент усиления системы управления для руления большим. Другими словами, когда поперечное ускорение становится меньше, ЭМУ 50 устанавливает коэффициент усиления системы управления для передачи на кузов неровностей дорожного покрытия большим и устанавливает коэффициент усиления системы управления для руления меньшим.
Даже в случае состояния поворота на неровной дороге ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге (далее в данном документе называемое "управлением для недопущения ударов во время поворота"), как показано в первом примере, когда передача неровностей дорожного покрытия не перекрывается с частотой в диапазоне реагирования и частотой, превышающей диапазон реагирования. Дополнительно, в случае не нахождения в повороте (а именно, в случае движения по прямой) ЭМУ 50 выполняет перекрывающее управление на неровной дороге (далее в данном документе именуемое "перекрывающим управлением во время движения по прямой"), как показано во втором примере, когда передача неровностей дорожного покрытия перекрывается с частотой в диапазоне реагирования и с частотой, превышающей диапазон реагирования. Кроме того, в случае движения по прямой ЭМУ 50 выполняет управление для недопущения ударов на неровной дороге (далее в данном документе называемое "управлением для недопущения ударов во время движения по прямой"), как показано в первом примере, когда передача неровностей дорожного покрытия не перекрывается с частотой в диапазоне реагирования и с частотой, превышающей диапазон реагирования.
Здесь будет приведено описание конкретного примера способа вычисления коэффициента усиления системы управления для руления и коэффициента усиления системы управления для передачи на кузов неровностей дорожного покрытия в пятом варианте осуществления, со ссылкой на фиг.11. Фиг.11 показывает карту соответствия для вычисления коэффициента усиления системы управления (вертикальная ось) из поперечного ускорения (горизонтальная ось). Коэффициент усиления системы управления имеет значение от 0 до 100(%). Конкретно, карта G21, показанная сплошной линией, показывает пример карты соответствия для вычисления коэффициента усиления системы управления для руления, а карта G22, показанная прерывистой линией, показывает пример карты соответствия для вычисления коэффициента усиления для передачи на кузов неровностей дорожного покрытия. Как показано на фиг.11, может быть понятно, что коэффициент усиления для руления становится больше, а коэффициент усиления для передачи на кузов неровностей дорожного покрытия становится меньше, когда поперечное ускорение становится больше. Другими словами, может быть понятно, что коэффициент усиления для руления, становится меньше, а коэффициент усиления для передачи на кузов неровностей дорожного покрытия становится больше, когда поперечное ускорение становится меньше. Выполняя управление посредством использования карты соответствия во время поворота, можно соответствующим образом балансировать ходовые качества с управляемостью и устойчивостью без ухудшения чувствительности рулевого управления.
Фиг.12 является блок-схемой последовательности операций, показывающей процесс управления в третьем примере пятого варианта осуществления изобретения. Процесс многократно повторяется посредством ЭМУ 50.
Сначала, на этапе S401, ЭМУ 50 определяет, является ли дорога неровной дорогой или нет. Когда дорога является неровной дорогой (этап S401; Да), процесс переходит к этапу S402. В отличие от этого, когда дорога не является неровной дорогой (этап S401; Нет), процесс переходит к этапу S411. В этом случае ЭМУ 50 выполняет обычное управление (этап S411), и процесс заканчивается.
На этапе S402 ЭМУ 50 определяет, находится или нет частота передачи на кузов неровностей дорожного покрытия в диапазоне реагирования приводов 16a и 18a стабилизаторов. Когда частота передачи на кузов неровностей дорожного покрытия находится в диапазоне реагирования (этап S402; Да), процесс переходит к этапу S403. В отличие от этого, когда частота передачи на кузов неровностей дорожного покрытия не находится в диапазоне реагирования (этап S402; Нет), процесс переходит к этапу S410. В этом случае ЭМУ 50 выполняет свободное управление (этап S410), и процесс заканчивается.
На этапе S403 ЭМУ 50 определяет, движется ли транспортное средство по прямой или нет. Например, ЭМУ 50 выполняет определение на основе поперечного ускорения, скорости поворота вокруг вертикальной оси и угла поворота рулевого колеса. Когда транспортное средство движется по прямой (этап S403; Да), процесс переходит к этапу S404. В отличие от этого, когда транспортное средство не движется по прямой (этап S403; Нет), а именно, когда транспортное средство поворачивает, процесс переходит к этапу S407.
Процессы после этапа S403 (этапы S404-S406) выполняются, когда транспортное средство движется по прямой на неровной дороге. Сначала, на этапе S404, ЭМУ 50 выполняет определение перекрывания входных воздействий. Когда условие определения перекрывания входных воздействий удовлетворяется (этап S404; Да), процесс переходит к этапу S405. В этом случае ЭМУ 50 выполняет перекрывающее управление во время движения по прямой (этап S405), и процесс заканчивается. В отличие от этого, когда условие определения перекрывания входных воздействий не удовлетворяется (этап S404; Нет), процесс переходит к этапу S406. В этом случае ЭМУ 50 выполняет управление для недопущения ударов во время движения по прямой (этап S406), и процесс заканчивается.
Между тем, процессы после этапа S407 (этапы S407-S409) выполняются, когда транспортное средство поворачивает на неровной дороге. Сначала, на этапе S407, ЭМУ 50 выполняет определение перекрывания входных воздействий. Когда условие определения перекрывания входных воздействий удовлетворяется (этап S407; Да), процесс переходит к этапу S408. В этом случае ЭМУ 50 выполняет перекрывающее управление во время поворота (этап S408), и процесс заканчивается. В отличие от этого, когда условие определения перекрывания входных воздействий не удовлетворяется (этап S407; Нет), процесс переходит к этапу S409. В этом случае ЭМУ 50 выполняет управление для недопущения ударов во время поворота (этап S409), и процесс заканчивается.
Посредством этого процесса, когда транспортное средство поворачивает на неровной дороге, можно соответствующим образом балансировать ходовые качества с управляемостью и устойчивостью без ухудшения чувствительности рулевого управления.
Модификация пятого варианта осуществления изобретения
В пятом варианте осуществления, когда вычисляется целевой момент подавления крена, вес в случае сложения целевого момента подавления крена при передаче на кузов неровностей дорожного покрытия с целевым моментом подавления крена при рулении также может изменяться в соответствии с состоянием дорожного покрытия (степенью неровности дороги), как показано в четвертом варианте осуществления.
Дополнительно, в пятом варианте осуществления, когда целевой момент подавления крена при передаче на кузов неровностей дорожного покрытия распределяется на передние и задние колеса, пропорция распределения между передними и задними колесами также может изменяться на основе не менее чем одного из угла поворота транспортного средства, скорости транспортного средства, времени, прошедшего от начала управления и распределения между передними и задними колесами входного компонента под пружиной, как показано в первом и третьем варианте осуществления.
Пятый вариант осуществления также может быть применен к системе, включающей в себя систему управления демпфирующим усилием, которая показана во втором варианте осуществления.
Промышленная применимость
Изобретение может быть использовано для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568047C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2405692C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УСТОЙЧИВОСТЬЮ | 2013 |
|
RU2644063C2 |
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2576553C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2582517C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РУЛЕНИЕМ | 2013 |
|
RU2581808C1 |

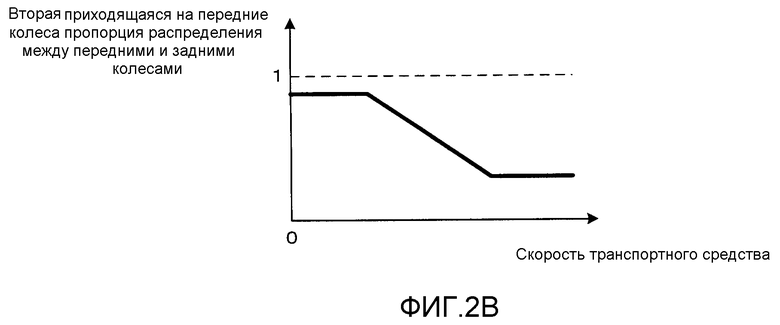
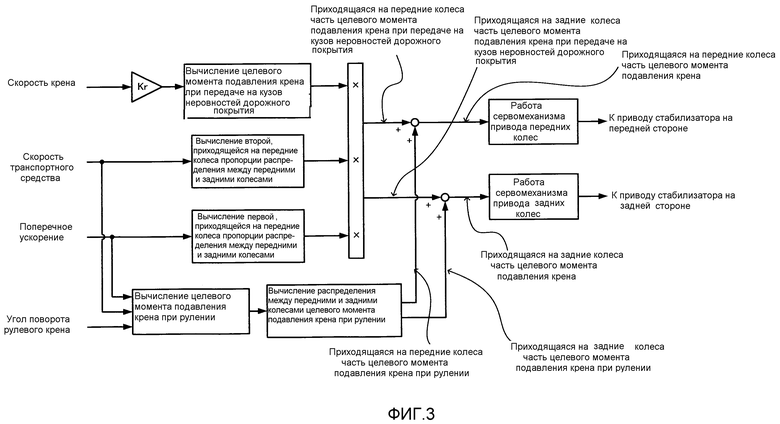
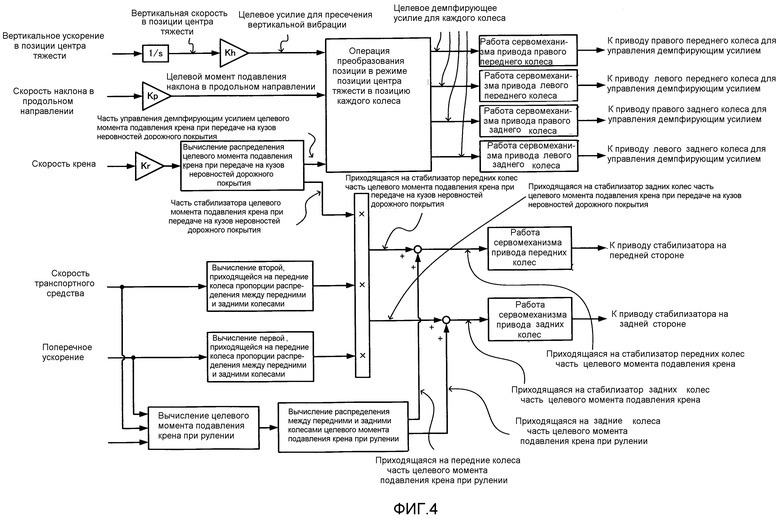
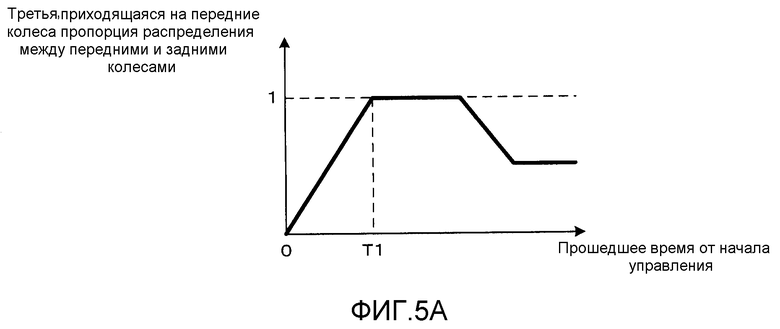
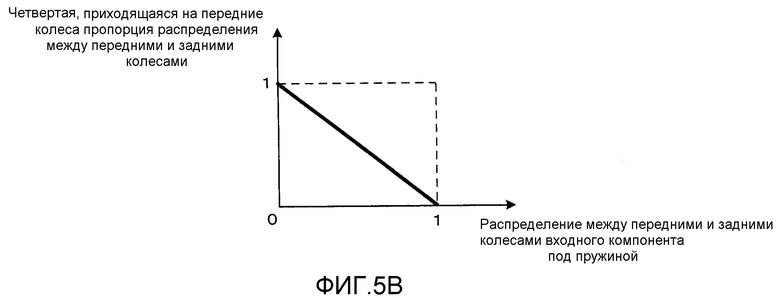
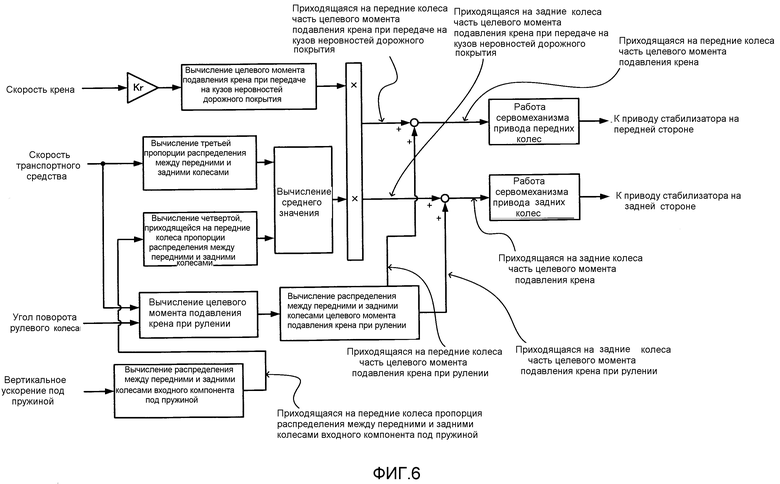
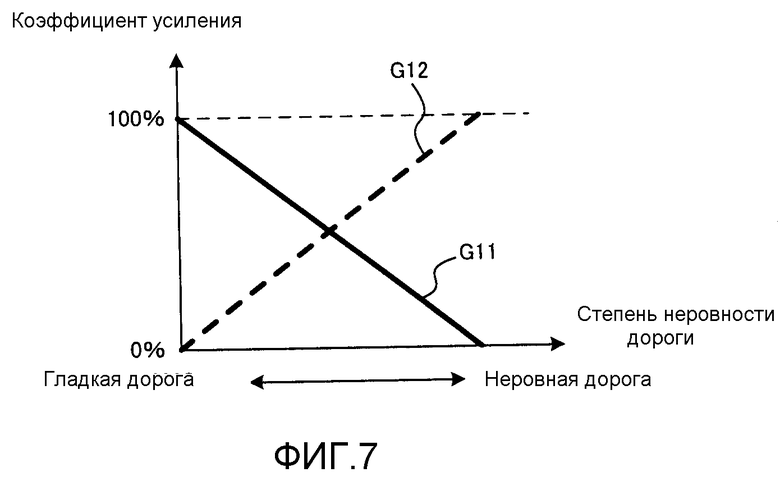
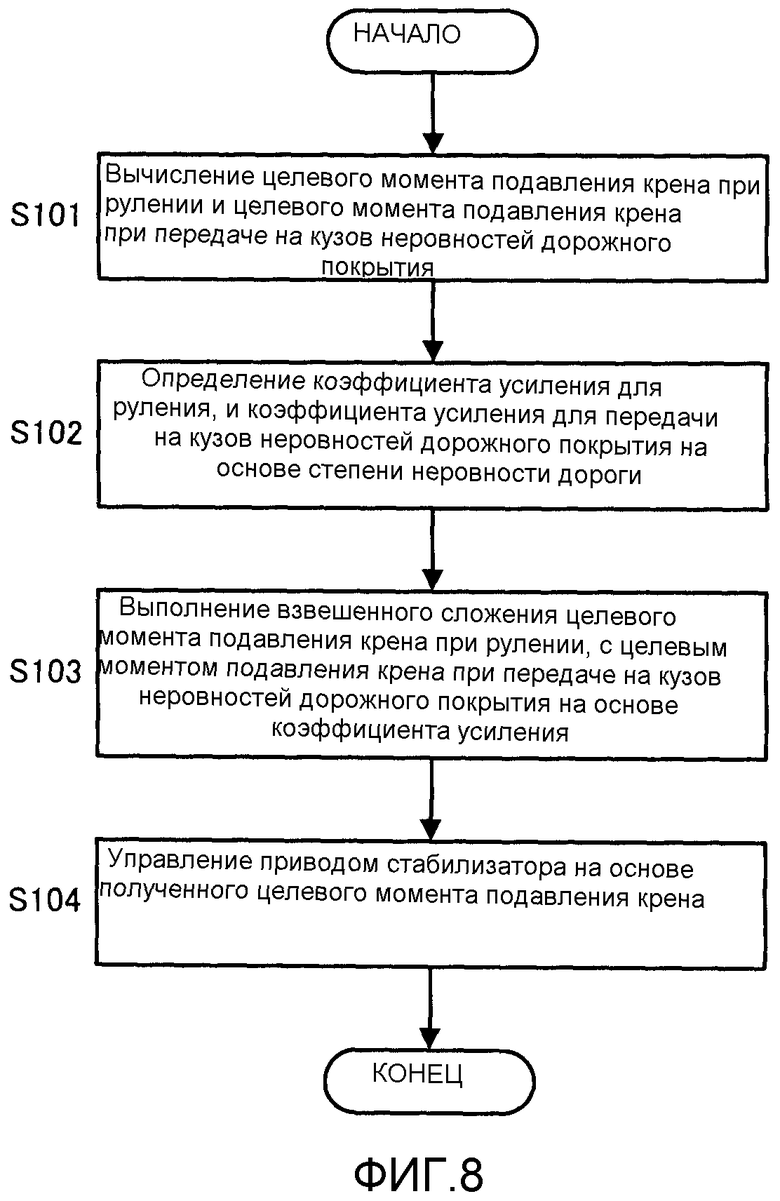
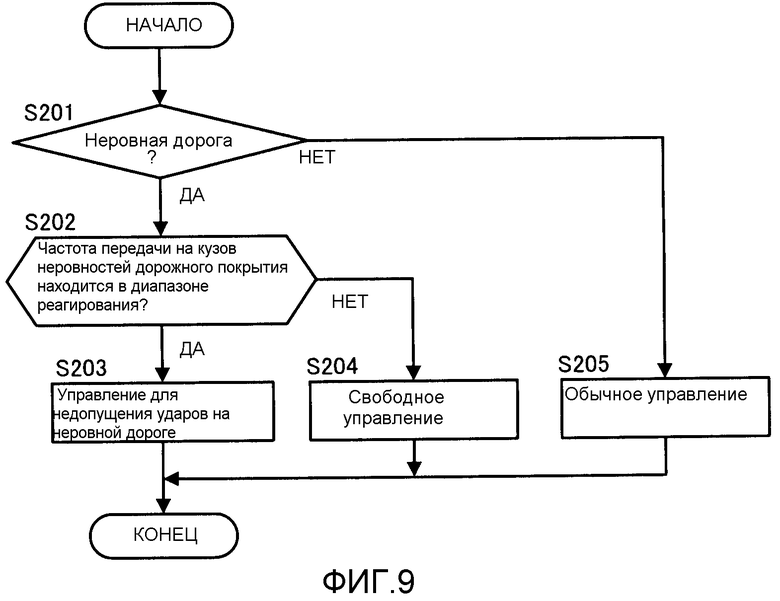
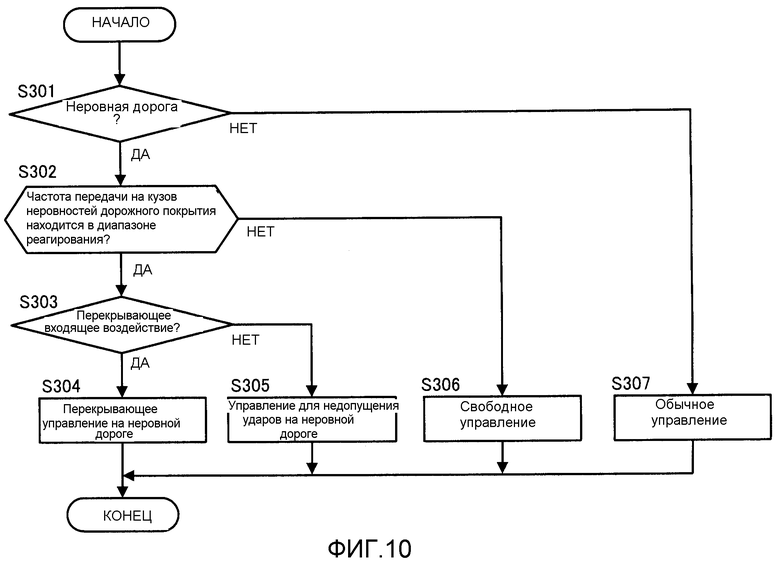
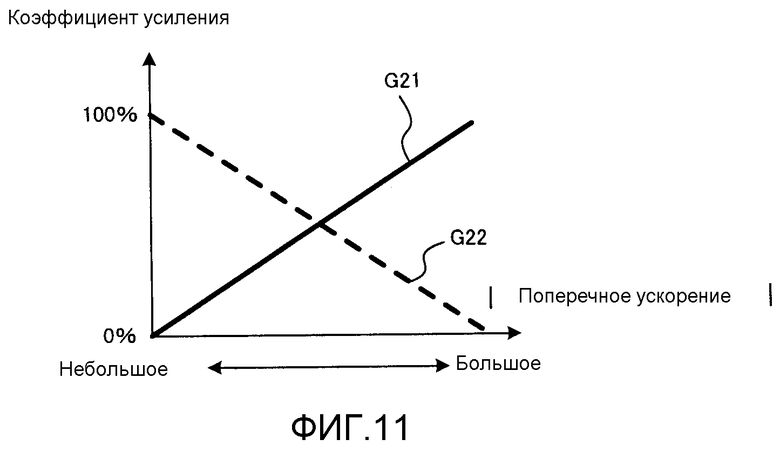
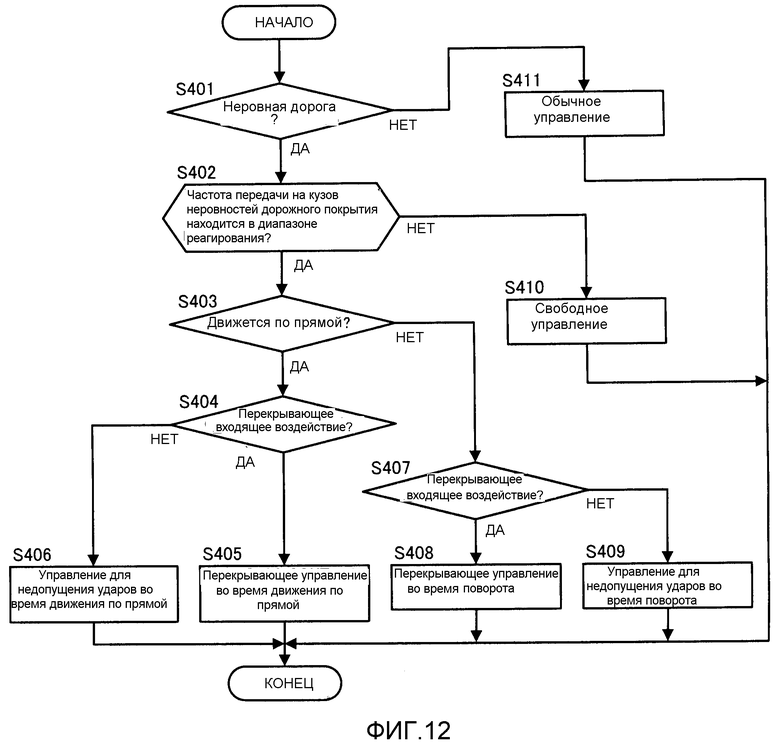
Изобретение предназначено для управления крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства. Устройство управления стабилизатором содержит электронный модуль управления (ЭМУ) (50), датчик (31) угла поворота рулевого колеса (14), датчик скорости транспортного средства (32), датчик поперечного ускорения (боковой перегрузки) (33), датчик скорости крена или ускорения (34), устройства активного стабилизатора (16, 18). Датчик скорости крена или ускорения (34) расположен над пружиной (19fL, 19fR, 19rL, 19rR) подвески транспортного средства. Электронный модуль управления (50) вычисляет момент подавления крена, прикладываемый к транспортному средству на основе сигналов датчиков (31-34) и управляет устройствами (16, 18) активных стабилизаторов. Достигается устранение крена вследствие руления и крена вследствие проезда неровностей дорожного покрытия. 7 н. и 5 з.п. ф-лы, 12 ил.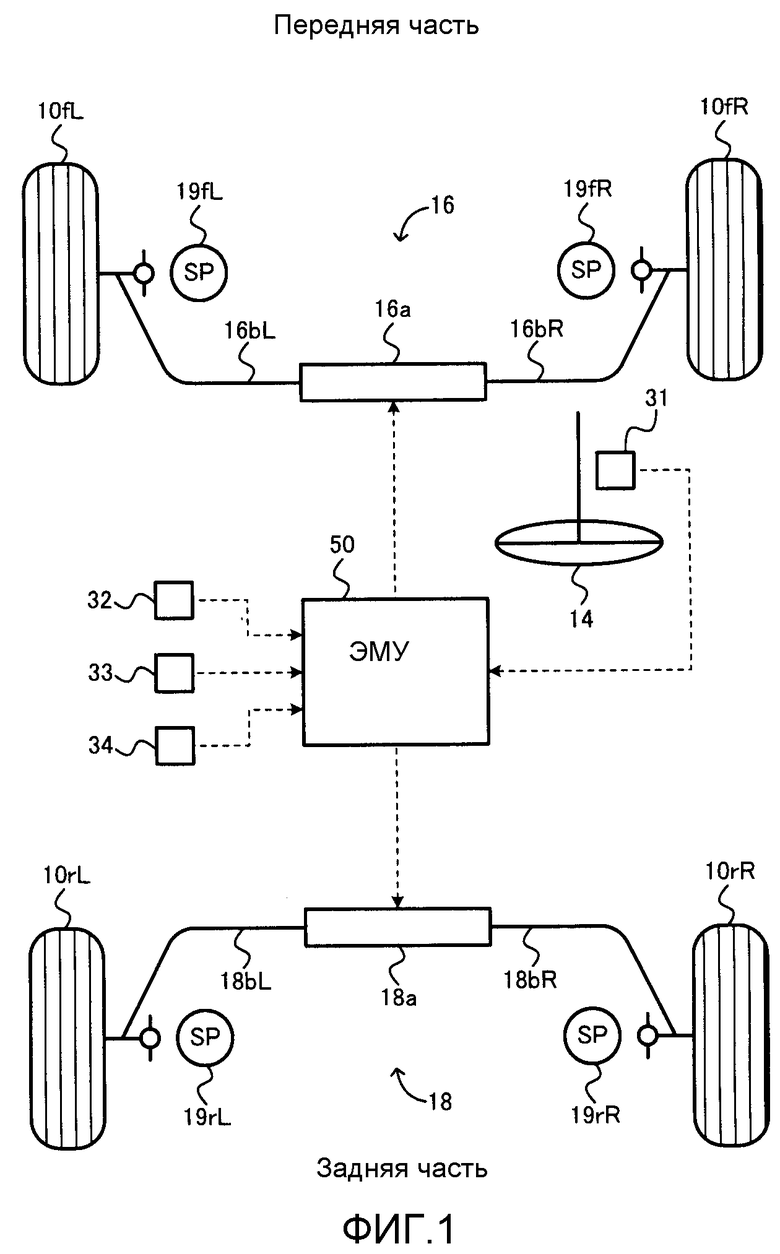
1. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором дополнительно вычисляет второй момент подавления крена на основе руления и управляет стабилизатором на основе первого момента подавления крена и второго момента подавления крена.
2. Устройство по п.1, в котором модуль управления стабилизатором устанавливает коэффициент усиления первого момента подавления крена меньшим и устанавливает коэффициент усиления второго момента подавления крена большим, когда угол поворота транспортного средства становится больше.
3. Устройство по п.1, в котором модуль управления стабилизатором устанавливает коэффициент усиления первого момента подавления крена большим и устанавливает коэффициент усиления второго момента подавления крена меньшим, когда степень неровности дороги становится больше.
4. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии с углом поворота транспортного средства.
5. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии со скоростью транспортного средства.
6. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве;
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена; и
модуль управления демпфирующим усилием, который выполняет управление транспортным средством в вертикальном направлении, направлении крена и продольном направлении, применяя демпфирующее усилие,
при этом, когда выполняется управление посредством модуля управления стабилизатором, модуль управления демпфирующим усилием увеличивает коэффициент усиления в вертикальном направлении и продольном направлении и уменьшает коэффициент усиления в направлении крена при управлении демпфирующим усилием.
7. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии с временем, прошедшим от начала управления на основе первого момента подавления крена.
8. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором изменяет пропорцию распределения между передними и задними колесами для распределения первого момента подавления крена в сторону передних колес и в сторону задних колес в соответствии с соотношением неровностей дорожного покрытия, передаваемых передней и задней подвескам.
9. Устройство управления стабилизатором для транспортного средства, которое выполняет регулируемое управление крутильной жесткостью стабилизатора, предусмотренного между правым и левым колесами транспортного средства, содержащее:
модуль получения информации об абсолютном крене, который получает информацию об абсолютном крене над пружиной из выходного сигнала датчика, установленного над пружиной в транспортном средстве; и
модуль управления стабилизатором, который вычисляет первый момент подавления крена на основе информации об абсолютном крене и управляет стабилизатором на основе первого момента подавления крена;
при этом модуль управления стабилизатором изменяет величину управления стабилизатора на основе первого момента подавления крена в соответствии с частотой передачи на кузов неровностей дорожного покрытия передней и задней подвескам.
10. Устройство по п.9, в котором модуль управления стабилизатором выполняет управление стабилизатором на основе первого момента подавления крена, когда частота передачи на кузов неровностей дорожного покрытия находится в пределах заданного значения, и выполняет управление стабилизатором так, чтобы устанавливать нейтральное состояние или свободное состояние, когда частота передачи на кузов неровностей дорожного покрытия превышает заданное значение.
11. Устройство по п.9, в котором, когда передача неровностей дорожного покрытия перекрывается с частотой передачи в пределах заданного значения и частотой, превышающей заданное значение, модуль управления стабилизатором выполняет первое управление стабилизатором, предоставляемого одним из передних и задних колес, на основе первого момента подавления крена и выполняет второе управление стабилизатором, предоставляемого другим колесам, так, чтобы устанавливать нейтральное состояние или свободное состояние.
12. Устройство по п.11, в котором, когда первое управление выполняется в состоянии поворота, модуль управления стабилизатором управляет стабилизатором на основе первого момента подавления крена и второго момента подавления крена, вычисленных для руления, прилагаемого к рулевому управлению, и устанавливает коэффициент усиления первого момента подавления крена меньшим и устанавливает коэффициент усиления второго момента подавления крена большим, когда угол поворота транспортного средства становится больше.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ЕР 1894756 А2, 05.03.2008 | |||
| Подвеска колес транспортного средства | 1990 |
|
SU1759663A1 |

