Изобретение относится к трубопроводному транспорту и может быть использовано для автоматического контроля технологического процесса транспортировки жидкости и газа, для контроля состояния трубопровода на участках нефтепроводов, газопроводов, водоводов, расположенных в труднодоступной местности.
Известен Способ контроля состояния магистрального газопровода и режимов его работы, включающий последовательные измерения параметров, характеризующих процесс транспортировки в контролируемых узлах газопровода, сравнение каждого измеренного значения параметра с его предельными уставками, выдачу сообщения при возникновении или исчезновении нарушения любой предельной уставки и переход к измерению следующего параметра, где каждое измеренное значение параметра запоминают и дополнительно сравнивают с режимными уставками (А.с. СССР №1390476, F17/D 5/02, приоритет от 26.03.86 г., оп. 23.04.88. Бюл. №15).
Недостатком данного способа является высокая себестоимость вырабатываемой электроэнергии, невысокая надежность, значительные затраты на техническую эксплуатацию.
Наиболее близким является способ контроля и регулирования режима работы трубопровода, включающий сбор информации о параметрах системы, обработку ее, запись данных, передачу, прием, выработку сигнала на исполнительные механизмы, осуществление на центральном диспетчерском пункте контроля за обработанной информацией о параметрах системы, поступающей с микропроцессорного контроллера, сбор информации о параметрах системы и ее обработку осуществляют с выделением аварийных отклонений параметров системы в результате их сравнения в микропроцессорном контроллере, после чего в микропроцессорном контроллере производят формирование и выработку управляющего сигнала на исполнительные механизмы, при этом прием или передача информации о параметрах системы между микропроцессорным контроллером и центральным диспетчерским пунктом осуществляют по команде микропроцессорного контроллера посредством приемно-передающей аппаратуры, а аккумуляторные батареи осуществляют питание средств измерений, приемно-передающей аппаратуры и микропроцессорного контроллера (Патент РФ №2304740, F17D 5/00, приоритет от 06.04.2005 г., оп. 20.08.2007 г., прототип).
Недостатком данного способа является высокая себестоимость вырабатываемой электроэнергии, невысокая надежность, значительные затраты на техническую эксплуатацию.
Известен Магистральный трубопровод, содержащий установленные на трассе трубопровода задвижки с приводами, разделяющие трассу на отдельные участки на каждом из которых установлены датчики, причем контакты реле датчиков расхода и давления включены последовательно в электрическую цепь, при этом электрическая цепь выработки сигнала управления для каждого участка связана с приводом задвижки, расположенной на входе участка (а.с. СССР №1651015, F17D 5/02, приоритет от 27.03.80 г., оп. 23.05.91 г. Бюл. №19)
Недостатком указанного технического решения является высокая себестоимость вырабатываемой электроэнергии, невысокая надежность, значительные затраты на техническую эксплуатацию.
Наиболее близкой является система контроля и регулирования режима работы трубопровода, содержащая средства измерений, приемно-передающую аппаратуру, источник питания и центральный диспетчерский пункт с записывающим устройством, электроприводные задвижки, микропроцессорный контроллер, выход которого подключен к входу узла электроприводных задвижек, приемно-передающая аппаратура представляет собой радиомодем, источник питания соединен со средствами измерений, радиомодемом, микропроцессорным контроллером и с электроприводными задвижками (Патент РФ №2304740, F17D 5/00, приоритет от 06.04.2005 г., оп. 20.08.2007 г., прототип).
Недостатком указанной Системы является высокая себестоимость вырабатываемой электроэнергии, невысокая надежность, значительные затраты на техническую эксплуатацию.
Предлагаемые Система контроля состояния трубопровода с гидравлическим энергетическим модулем и способ для ее реализации лишены приведенных выше недостатков и позволяют повысить эксплуатационную надежность системы и осуществить способ, используя энергию перекачиваемого продукта, преобразованную в электрическую энергию, при наличии компьютеризации и диспетчеризации всех процессов, кроме этого отсутствие вредных выбросов при реализации предлагаемых технических решений.
Поставленная цель достигается тем, что Система контроля состояния трубопровода с гидравлическим энергетическим модулем содержит основной трубопровод, электроприводную задвижку, средства измерений технологических процессов, представляющие собой датчик или несколько датчиков и преобразователей сигналов, центральный диспетчерский пункт с приемно-передающей аппаратурой и записывающим устройством, аккумуляторные батареи, силовой шкаф, микропроцессорный контроллер, соединенный по входам со средствами измерений технологических процессов и по выходам с электроприводной задвижкой, обводную линию, представляющую собой участок трубопровода с размером диаметра меньшим, чем размер диаметра основного трубопровода и расположенную в зоне размещения электроприводной задвижки на линейной части основного трубопровода, при этом обводная линия герметично соединена с основным трубопроводом до электроприводной задвижки и после электроприводной задвижки, инверторы, гидротурбину, муфту отбора мощности, электрогенератор с зарядным устройством, двигатель внутреннего сгорания, при этом гидротурбина расположена на обводной линии с возможностью гидравлического сообщения с транспортируемым продуктом из основного трубопровода и соединена с электрогенератором с зарядным устройством посредством муфты отбора мощности, при этом записывающее устройство представляет собой ЭВМ с программным обеспечением, приемно-передающая аппаратура представляет собой радиомодем, она дополнительно снабжена фильтром, расположенным на обводной линии, на ее входе, двумя технологическими электроприводными задвижками, одна из которых расположена на входе в обводную линию, а другая технологическая электроприводная задвижка расположена на выходе из обводной линии, защитным кожухом в виде блок-бокса контейнерного типа, системой поддержания микроклимата, системой освещения, системой охранно-пожарной сигнализации и системой защиты, размещенные в защитном кожухе.
Способ контроля состояния трубопровода с гидравлическим энергетическим модулем включает в себя сбор информации о параметрах системы, обработку ее, запись данных, передачу, прием, выработку сигнала на исполнительные механизмы, осуществление на центральном диспетчерском пункте контроля за обработанной информацией о параметрах системы, поступающей с микропроцессорного контроллера, сбор информации о параметрах системы и ее обработку осуществляют с выделением аварийных отклонений параметров системы в результате их сравнения в микропроцессорном контроллере, после чего в микропроцессорном контроллере производят формирование и выработку управляющего сигнала на исполнительные механизмы, при этом прием или передача информации о параметрах системы между микропроцессорным контроллером и центральным диспетчерским пунктом осуществляют посредством приемно-передающей аппаратуры, а аккумуляторные батареи осуществляют питание средств измерений, приемно-передающей аппаратуры, микропроцессорного контроллера и исполнительных механизмов, отбор транспортируемого продукта из основного трубопровода по обводной линии и возврат транспортируемого продукта в основной трубопровод по обводной линии, приведение в действие гидравлической турбины посредством заданного количества транспортируемого продукта, отобранного из основного трубопровода, а в качестве исполнительных механизмов используют электроприводную задвижку, зарядные устройства аккумуляторных батарей, также дополнительно осуществляют защиту от несанкционированного срабатывания узла электроприводной задвижки и защиту технологического оборудования от механических примесей.
На фигуре представлена схема Системы контроля состояния трубопровода с гидравлическим энергетическим модулем.
Существующие требования обеспечения безопасной эксплуатации трубопроводных систем различного назначения (водо, нефте, газо, продукто, теплопроводы) предусматривают оснащение линейной части трубопровода распределенными системами мониторинга и управления, такими как системы контроля утечек, системы электрохимической защиты, узлы аварийных задвижек и т.д.
Функционирование данных систем предполагает наличие в местах их установки систем электропитания. Штатной ситуацией при прокладке трубопроводов является значительное удаление его отдельных участков от централизованных сетей электроснабжения, когда строительство подводящих линий электропитания становится экономически нецелесообразным. В данном случае реализуются автономные энергетические модули, обеспечивающие выработку собственной электроэнергии в местах размещения технологического оборудования.
Современные энергетические модули представляют собой хранилища электроэнергии построенные на базе аккумуляторных батарей. Для нужд промышленности сегодня выпускаются энергетические модули со следующими энергетическими показателями:
от 400 В до единиц кВ по напряжению;
от 0,2 МВтч до единиц МВтч по энергии;
от десятков кВтдо единиц МВт по мощности.
В них для поддержания уровня заряда аккумуляторов энергетических модулей на требуемом уровне в комплекте с энергетическими модулями используют так называемые "силовые модули". Силовой модуль осуществляет выработку (генерацию) электроэнергии, необходимую для подзарядки аккумуляторных батарей, управление зарядом батарей, преобразование постоянного напряжения аккумуляторной батареи в переменное на сетевой частоте для обеспечения внешних потребителей и контроль состояния энергетического модуля. В качестве генерирующих элементов в силовых модулях сегодня используются дизельные электростанции небольшой мощности, ветроэлектростанции или солнечные батареи.
Очевидно, что перечисленные источники имеют целый ряд недостатков, таких как высокая себестоимость вырабатываемой электроэнергии, невысокая надежность, значительные затраты на техническую эксплуатацию. Также отметим, что слабая развитость в местах прокладки трубопроводов транспортной инфраструктуры и сложные климатические условия осложняют процесс завоза топлива и проведение технического обслуживания.
В тоже время транспортируемый в трубопроводе продукт в виде жидкой или газообразной среды обладает значительной гидравлической мощностью и незначительный отбор (не более 2%) мощности для преобразования ее в электрическую энергию не влияет на процесс перекачки. К тому же не представляет труда компенсировать эти потери за счет запаса по мощности головной или промежуточной насосной станции трубопровода.
Предлагаемые Система контроля состояния трубопровода с гидравлическим энергетическим модулем и способ для ее реализации, используя энергию перекачиваемого продукта по основному трубопроводу, вырабатывают необходимую электроэнергию достаточную для эксплуатации Системы, в том числе для подзарядки аккумуляторов, для плавной регулировки генерируемой электрической мощности.
Предлагаемая Система контроля состояния трубопровода с гидравлическим энергетическим модулем содержит основной трубопровод 1 с электроприводной задвижкой 2, средства измерения технологических процессов 3, средство связи 4, диспетчерский пункт, обводную линию 5, гидравлический энергетический модуль, модуль автоматики.
Электроприводная задвижка 2 предназначена для частичного или полного закрытия или открытия основного трубопровода 1.
Электроприводная задвижка 2 представляет собой известное запорное устройство различного конструктивного исполнения с приводом от электродвигателя.
Средства измерений технологических процессов 3 представляют собой датчик или датчики и преобразователи сигналов и обеспечивают сбор информации о технологических параметрах системы.
По показаниям датчика или датчиков 3 осуществляют контроль за состоянием транспортной системы в виде основного трубопровода 1 и текущего в нем транспортируемого продукта.
Средство связи 4 представляет собой радиомодем и обеспечивает обмен информацией, полученной с датчика или датчиков, с удаленным диспетчерским пунктом.
Центральный диспетчерский пункт включает в себя приемно-передающую аппаратуру и записывающее устройство.
Приемно-передающая аппаратура диспетчерского пункта представляет собой радиомодем.
Записывающее устройство диспетчерского пункта представляет собой ЭВМ с программным обеспечением.
Обводная линия 5 расположена в зоне размещения электроприводной задвижки 2 на линейной части основного трубопровода 1, при этом начало обводной линии 5 герметично соединено с основным трубопроводом 1 до электроприводной задвижки 2, а конец обводной линии 5 герметично соединен с основным трубопроводом 1 после электроприводной задвижки 2. Герметичное соединение обводной линии 5 с основным трубопроводом 1 осуществляют посредством сварки или фланцевых соединений.
Обводная линия 5 представляет собой участок трубопровода с размером диаметра меньшим, чем размер диаметра основного трубопровода 1.
Гидравлический энергетический модуль представляет собой автономный источник электроэнергии на базе аккумуляторных батарей с силовым модулем для их подзарядки и включает в себя гидравлическую турбину 6, муфту отбора мощности 7, электрогенератор с зарядным устройством 8, двигатель внутреннего сгорания 9, инвертор 10, силовой шкаф 11 и аккумуляторные батареи 12.
Гидравлическая турбина 6 представляет собой известное устройство, преобразующее энергию перекачиваемой среды в энергию вращающегося вала. Гидравлическая турбина 6 служит приводом для электрогенератора с зарядным устройством 8.
Гидравлическая турбина 6 расположена на обводной линии 5 с возможностью гидравлического сообщения с транспортируемым продуктом из основного трубопровода 1 и соединена с электрогенератором с зарядным устройством 8 посредством муфты отбора мощности 7.
Заданный режим работы гидравлической турбины 6 обеспечивает электроприводная задвижка 2 посредством создания заданного перепада давления.
Двигатель внутреннего сгорания 9 служит резервным приводом при остановке основного трубопровода 1 на регламентные работы.
Муфта отбора мощности 7 предназначена для обеспечения подключения привода электрогенератора поочередно от основной силовой установки в виде гидравлической турбины 6 или вспомогательной в виде двигателя внутреннего сгорания 9.
Аккумуляторные батареи 12 представляют собой известный химический источник тока и служат основным источником электроэнергии Системы.
Инвертор 10 представляет собой известный прибор, который создает переменное напряжение при подключении источника постоянного напряжения, и предназначены для преобразования низкого постоянного напряжения аккумуляторной батареи 12 в высокое напряжение сетевой частоты, необходимое для работы подключаемого к Системе оборудования внешних нагрузок, например, электроприводной задвижки 2.
Силовой шкаф 11 представляет собой, известную конструкцию, которая обеспечивает прием электроэнергии и распределение ее по потребителям, и предназначен для подключения и аварийной защиты внешних нагрузок.
Блок автоматики включает в себя микропроцессорный контроллер 13. Микропроцессорный контроллер 13 соединен по входам со средствами измерений технологических процессов 3 и по выходам с исполнительными механизмами, которые представляют собой, например, электроприводную задвижку 2.
Микропроцессорный контроллер 13 осуществляет сбор информации о технологических параметрах системы, обработку технологических параметрах и управляет процессом зарядки аккумуляторных батарей 12.
Информационный обмен между микропроцессорным контроллером 13 и центральным диспетчерским пунктом осуществляют посредством приемно-передающей аппаратуры, а связь между остальными узлами и оборудованием осуществляют по проводной связи в виде кабельной линии.
Центральный диспетчерский пункт осуществляет прием и передачу информации, запись данных и контроль обработанной информации о технологических параметрах, поступающей с микропроцессорного контроллера 13 посредством приемно-передающей аппаратуры, например, радиомодема, и записывающего устройства.
Обводная линия 5 обеспечивает гидравлическое взаимодействие гидравлической турбины 6 с транспортируемым продуктом из основного трубопровода 1, по которому протекает транспортируемый продукт в виде нефти, газа.
Обводная линия 5 обеспечивает отбор транспортируемого продукта из основного трубопровода 1 и возврат транспортируемого продукта в основной трубопровод 1. В процессе прохождения транспортируемого продукта по обводной линии 5 с гидравлической турбиной 6 осуществляют приведение в действие гидравлическую турбину 6 посредством заданного количества транспортируемого продукта.
Система дополнительно содержит две технологические электроприводные задвижки 14, фильтр 15, защитный кожух 16 в виде блок-бокса контейнерного типа, систему поддержания заданного микроклимата, систему освещения, систему охранно-пожарной сигнализации и систему защиты.
Технологические электроприводные задвижки 14 предназначены для регулирования режима работы гидравлической турбины 6 и отсечения обводной линии 5 от основного трубопровода 1 при регламентных работах и при этом, одна из которых расположена на входе в обводную линию 5, а другая расположена на выходе из обводной линии 5.
Фильтр 15 представляет собой, например, сетчатый, и предназначен для защиты технологического оборудования от механических примесей и расположен на входе в обводную линию 5.
Система поддержания заданного микроклимата представляет собой обогреватель или несколько обогревателей и вентиляционную систему.
Система безопасности включает систему пожарной безопасности и систему контроля несанкционированного доступа.
Микропроцессорный контроллер 13 осуществляет управление узлами и оборудованием, расположенными как внутри блок-бокса 16, так и на контролируемом участке основного трубопровода 1, посредством программного обеспечения.
Средства измерений технологических процессов 3 установлены, как внутри блок-бокса 16, так и на контролируемом участке основного трубопровода 1.
По показаниям датчиков или датчика 3 осуществляют контроль за состоянием транспортной системы в виде основного трубопровода 1 и текущего в нем транспортируемого продукта, блок-бокса 16, узлов и оборудования, расположенного внутри него. Таким образом, в качестве информации о технологических параметрах системы используют данные контроля за состоянием самого основного трубопровода 1, текущей в нем среды, блок-бокса 16, узлов и оборудования, расположенного, как внутри него, так и на контролируемом участке основного трубопровода 1, например, контроль за целостностью блок-бокса 16, за целостностью основного трубопровода 1.
Исполнительными механизмами в Системе являются зарядные устройства аккумуляторных батарей 12 (уровень заряда) и электроприводная задвижка 2 (закрыть, открыть), а также дополнительно система поддержания микроклимата (включить, выключить) и две технологические электроприводные задвижки 14 (закрыть, открыть).
Источник энергии представляет собой источник питания, состоящий из гидравлической турбины 6, электрогенератора с зарядным устройством 8, аккумуляторных батарей 12 и инвертора 10.
Система поддержания микроклимата, система освещения, система охранно-пожарной сигнализации и система защиты размещены в защитном кожухе 16.
Все оборудование Системы размещено в защитном кожухе 16 в виде блок-бокса контейнерного типа, выполненного в антивандальном исполнении.
Способ контроля состояния трубопровода с гидравлическим энергетическим модулем включает в себя сбор информации о параметрах системы, обработку ее, запись данных, передачу, прием, выработку сигнала на исполнительные механизмы, осуществление на центральном диспетчерском пункте контроля за обработанной информацией о параметрах системы, поступающей с микропроцессорного контроллера 13, сбор информации о параметрах системы и ее обработку осуществляют с выделением аварийных отклонений параметров системы в результате их сравнения в микропроцессорном контроллере 13, после чего в микропроцессорном контроллере 13 производят формирование и выработку управляющего сигнала на исполнительные механизмы, при этом прием или передача информации о параметрах системы между микропроцессорным контроллером 13 и центральным диспетчерским пунктом осуществляют посредством приемно-передающей аппаратуры, а аккумуляторные батареи 12 осуществляют питание средств измерений технологических процессов 3, приемно-передающей аппаратуры, микропроцессорного контроллера 13 и исполнительных механизмов, приведение в действие гидравлическую турбину 6 посредством заданного количества транспортируемого продукта, отобранного из основного трубопровода 1, при этом отбор транспортируемого продукта из основного трубопровода 1 осуществляют по обводной линии 5 с последующим его возвратом в основной трубопровод 1 по обводной линии 5, а в качестве исполнительных механизмов используют электроприводную задвижку 2, зарядные устройства аккумуляторных батарей 12, также он дополнительно осуществляет защиту от несанкционированного (ложного или некорректного) срабатывания узла электроприводной задвижки 2 и защиту технологического оборудования от механических примесей посредством фильтра 15, реализует предлагаемую Систему контроля состояния трубопровода с гидравлическим энергетическим модулем.
Электроэнергию, необходимую для постоянной подзарядки аккумуляторных батарей 12 вырабатывают приведя гидравлическую турбину 6 в рабочее состояние посредством пропуска через нее, отобранного из основного трубопровода 1 транспортируемого продукта в виде жидкой или газообразной среды с последующим его возвратом в основной трубопровод 1 по обводной линии 5 в процессе транспортировки продукта по основному трубопроводу 1, при этом в качестве генерирующей системы используют электрогенератор с зарядным устройством 8 с приводом от гидравлической турбины 6.
Способ контроля состояния трубопровода с гидравлическим энергетическим модулем осуществляют следующим образом.
Блок-бокс 16 располагают вблизи контролируемого участка основного трубопровода 1.
Герметично соединяют с основным трубопроводом 1 обводную линию 5 в зоне размещения электроприводной задвижки 2 на линейной части основного трубопровода 1, при этом начало обводной линии 5 герметично соединяют с основным трубопроводом 1 до электроприводной задвижки 2, а конец обводной линии 5 герметично соединяют с основным трубопроводом 1 после электроприводной задвижки 2.
Герметичное соединение осуществляют посредством сварки или фланцевых соединений.
В процессе транспортирования продукта по основному трубопроводу 1 осуществляют сбор информации о параметрах транспортной системы, то есть контролируемая информация о технологических параметрах транспортной системы передается от средств измерений технологических процессов 3 в микропроцессорный контроллер 13 для ее обработки с помощью программного обеспечения и одновременно с этим осуществляют отбор транспортируемого продукта из основного трубопровода 1 и его возврат обратно посредством обводной линии 5. Транспортируемый продукт, проходя через гидравлическую турбину 6 в заданном количестве, преобразует гидравлическую мощность текущей среды посредством гидравлической турбины 6 и электрогенератора с зарядным устройством 8 в электрическую энергию, обеспечивающем удовлетворения потребности Системы в энергоресурсах.
При этом обработку информации о параметрах состояния основного оборудования осуществляют в микропроцессорном контроллере 13 с помощью программного обеспечения с выделением аварийных отклонений и выработкой управляющих воздействий.
Одновременно с процессом обработки технологических параметров транспортной системы микропроцессорным контроллером 13 осуществляют и процесс обработки технологических параметров защитного кожуха 16, узлов и вспомогательного оборудования, например, целостности защитного кожуха 16, пожарной безопасности и температурного режима внутри него.
Для этого посредством средств измерений технологических процессов 3 в виде датчиков или датчика, установленных внутри защитного кожуха 16, осуществляют сбор информации о контролируемых технологических параметрах, например, температуре внутри защитного кожуха 16, уровне заряда аккумуляторных батарей 12 и данные о гидравлической турбине 6, которые поступают в микропроцессорный контроллер 13 для ее обработки с помощью программного обеспечения.
Вся информация, полученная микропроцессорным контроллером 13 в процессе сбора информации о параметрах транспортной системы, им же и обрабатывается, то есть сравниваются измеряемые параметры с предельными уставками этих технологических параметров. При этом предельные уставки заранее загружены в память микропроцессорного контроллера 13 с центрального диспетчерского пункта.
Кроме этого в файле текущих или аварийных ситуаций фиксируется, то есть записывается и запоминается, как само значение контролируемого технологического параметра, так и время событии. Эта информация далее передается на центральный диспетчерский пункт, где также записывается и запоминается, осуществляется контроль за обработанной микропроцессорным контроллером 13 информацией о параметрах системы. В случае выхода контролируемого параметра за заданную предельную величину уставки, микропроцессорный контроллер 13 вырабатывает соответствующий управляющий сигнал на исполнительные механизмы, например, на магнитные пускатели силового шкафа 11, и отключает силовые цепи в блок-боксе 16.
Также микропроцессорный контроллер 13 обеспечивает несколько уровней защиты от ложного или некорректного срабатывания двух технологических электроприводных задвижек 14 и/или электроприводной задвижки 2.
При выявлении в процессе сравнения значений технологических параметров отклонений от заданного предельного значения уставки, эта информация, также фиксируется в микропроцессорном контроллере 13, как само значение, так и время события, и передается на центральный диспетчерский пункт, для последующей идентификации ситуации оператором.
Процесс сравнивания значений контролируемых технологических параметров с его предельными уставками микропроцессорным контроллером 13 осуществляется для каждого измеренного значения технологического параметра в отдельности.
В результате сравнения в микропроцессорном контроллере 13 в случае необходимости вырабатывается сигнал на исполнительные механизмы, например, закрыть или открыть технологические электроприводные задвижки 14 и/или электроприводную задвижку 2, обеспечить заданный уровень заряда зарядных устройств аккумуляторных батарей 12, включить или выключить систему поддержания микроклимата.
Передача информации о параметрах системы с микропроцессорного контроллера 13 и прием ее на центральном диспетчерском пункте посредством приемно-передающей аппаратуры осуществляют как в обычном режиме в соответствии регламента, так и в виде запроса оператора для получения подтверждения аварийной ситуации.
После получения микропроцессорным контроллером 13 с центрального диспетчерского пункта подтверждения аварийной ситуации в транспортной системе и разрешения на управление технологическими электроприводными задвижками 14 и электроприводной задвижкой 2, осуществляется выработка управляющего сигнала с микропроцессорного контроллера 13 на две технологические электроприводные задвижки 14 и/или электроприводную задвижку 2, которые, под воздействием этого управляющего сигнала, закрывают технологические электроприводные задвижки 14 и/или электроприводную задвижку 2, тем самым, регулируя контролируемый участок основного трубопровода 1 перекрывая или открывая поток транспортируемого продукта в основном трубопроводе 1.
Иными слова в случае подтверждения аварийной ситуации в транспортной системе в короткий срок дистанционно срабатывают технологические электроприводные задвижки 14 и/или электроприводная задвижка 2 на контролируемом участке основного трубопровода 1 и обводной линии 5 с помощью управляющего сигнала с микропроцессорного контроллера 13. Тем самым, предотвращая длительные утечки транспортируемого продукта, например, нефти, газа, из основного трубопровода 1, которые могут привести к аварии, значительным экономическим потерям и загрязнению окружающей среды (водные переходы нефтепроводов, нефтепроводы рядом с лесными массивами и т.д.).
При возникновении аварийной ситуации как внутри блок-бокса 16, так и в транспортной системе, на центральном диспетчерском пункте автоматически срабатывает устройство оповещение путем включения световой, звуковой или иной сигнализации.
Для работы исполнительных механизмов постоянное напряжение аккумуляторных батарей 12 посредством инвертора 10 преобразуют в высокое напряжение сетевой частоты, которое через оборудование силового шкафа 11 обеспечивает работу внешних и внутренних потребителей.
Для энергообеспечения системы в случае остановки обводной линии 5 и/или основного трубопровода 1 на регламентные или аварийные работы через муфту отбора мощности 7 осуществляют подключение привода электрогенератора с зарядным устройством 8 к маломощному резервному двигателю внутреннего сгорания 9.
Предлагаемые технические решения для осуществления контроля состояния трубопровода на участках нефтепроводов, газопроводов, водоводов, расположенных в труднодоступной местности, позволяют снизить затраты на техническую эксплуатацию и себестоимость вырабатываемой электроэнергии, повысить эксплуатационную надежность Системы и осуществить Способ без стационарных источников энергоснабжения, используя энергию перекачиваемого продукта, преобразованную в электрическую энергию, которая обеспечивает режим постоянной не циклической подзарядки аккумуляторных батарей, возможность плавной регулировки генерируемой электрической мощности при наличии компьютеризации и диспетчеризации всех процессов, а также при использовании предлагаемых технических решений отсутствуют вредные выбросы, в том числе и в атмосферу.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОНТРОЛЯ СОСТОЯНИЯ ТРУБОПРОВОДА С ДВУХКОНТУРНЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2560467C1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ТРУБОПРОВОДА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2304740C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ТРУБОПРОВОДА | 2012 |
|
RU2534397C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ТРУБОПРОВОДА | 2023 |
|
RU2807486C1 |
| КОМПЛЕКС АВТОНОМНОГО ЭЛЕКТРОСНАБЖЕНИЯ ПУНКТА СБОРА ДАННЫХ СИСТЕМЫ ОБНАРУЖЕНИЯ УТЕЧЕК ЖИДКИХ УГЛЕВОДОРОДОВ | 2019 |
|
RU2723344C1 |
| Автоматизированный комплекс мониторинга процесса транспортирования нефтепродуктов по наземному сборно-разборному полевому магистральному трубопроводу с соединением "раструб" | 2023 |
|
RU2812007C1 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| ДЕТАНДЕР-ГЕНЕРАТОРНЫЙ РЕГУЛЯТОР ДАВЛЕНИЯ С ДОПОЛНИТЕЛЬНЫМ ЭЛЕКТРОРЕГУЛИРОВАНИЕМ | 2021 |
|
RU2767847C1 |
| Автономная гибридная энергоустановка | 2022 |
|
RU2792410C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС | 2013 |
|
RU2575681C2 |
Изобретение относится к трубопроводному транспорту и может быть использовано для автоматического контроля технологического процесса транспортировки жидкости и газа. Система содержит основной трубопровод, электроприводную задвижку, средства измерений технологических процессов, центральный диспетчерский пункт с приемно-передающей аппаратурой и записывающим устройством, аккумуляторные батареи, силовой шкаф, микропроцессорный контроллер, обводную линию. При этом обводная линия герметично соединена с основным трубопроводом до электроприводной задвижки и после электроприводной задвижки. Также система содержит инверторы, гидротурбину, муфту отбора мощности, электрогенератор с зарядным устройством, двигатель внутреннего сгорания. Способ включает в себя сбор информации о параметрах системы, обработку ее, запись данных, передачу, прием, выработку сигнала на исполнительные механизмы, осуществление на центральном диспетчерском пункте контроля за обработанной информацией о параметрах системы и ее обработку с выделением аварийных отклонений параметров системы в результате их сравнения в микропроцессорном контроллере. Техническим результатом является возможность повысить эксплуатационную надежность системы и осуществить способ без стационарных источников энергоснабжения. 2 н. и 8 з.п. ф-лы, 1 ил.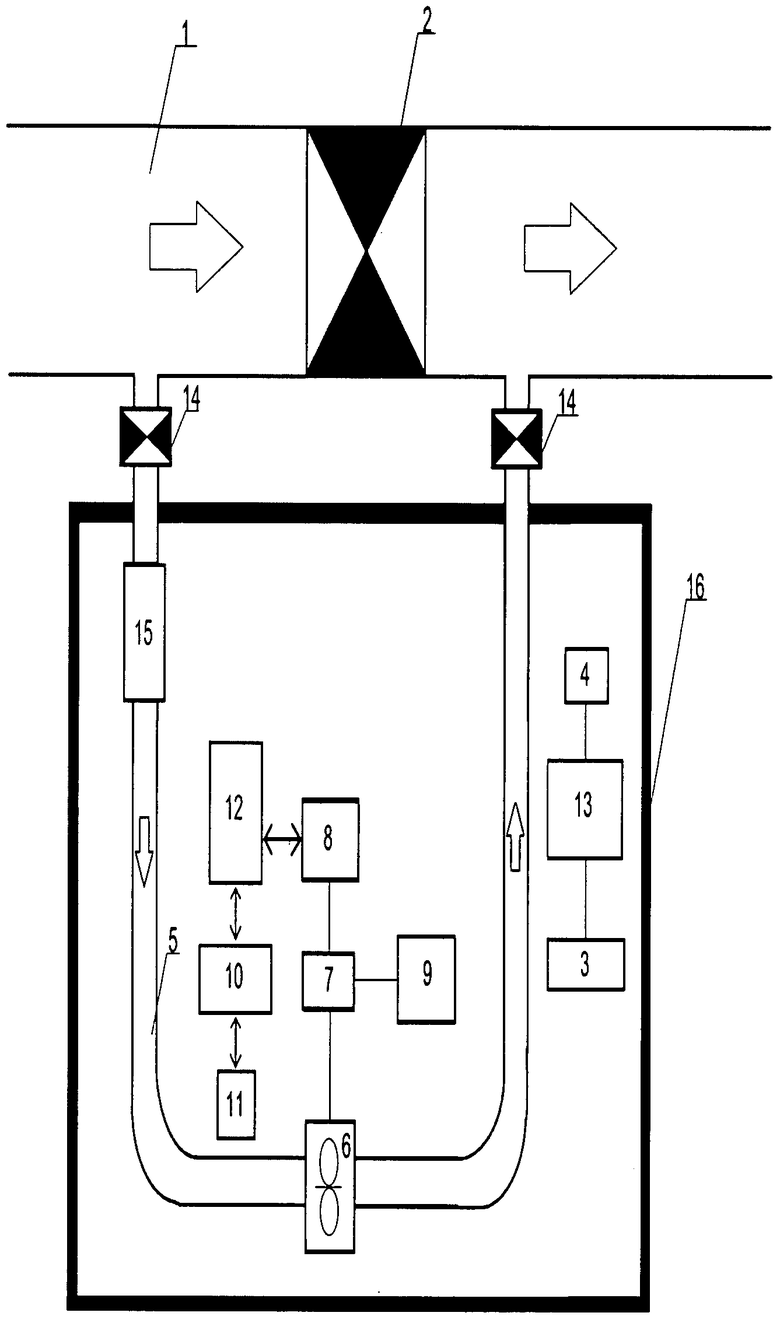
1. Система контроля состояния трубопровода с гидравлическим энергетическим модулем, содержащая основной трубопровод, электроприводную задвижку, средства измерений технологических процессов, представляющие собой датчик или несколько датчиков и преобразователей сигналов, центральный диспетчерский пункт с приемно-передающей аппаратурой и записывающим устройством, аккумуляторные батареи, силовой шкаф, микропроцессорный контроллер, соединенный по входам со средствами измерений технологических процессов и по выходам с электроприводной задвижкой, отличающаяся тем, что она дополнительно содержит обводную линию, представляющую собой участок трубопровода с размером диаметра меньшим, чем размер диаметра основного трубопровода, и расположенную в зоне размещения электроприводной задвижки на линейной части основного трубопровода, при этом обводная линия герметично соединена с основным трубопроводом до электроприводной задвижки и после электроприводной задвижки, инвертор, гидравлическую турбину, муфту отбора мощности, электрогенератор с зарядным устройством, двигатель внутреннего сгорания, при этом гидравлическая турбина расположена на обводной линии с возможностью гидравлического сообщения с транспортируемым продуктом из основного трубопровода и соединена с электрогенератором с зарядным устройством посредством муфты отбора мощности.
2. Система по п.1, отличающаяся тем, что записывающее устройство представляет собой ЭВМ с программным обеспечением.
3. Система по п.1, отличающаяся тем, что приемно-передающая аппаратура представляет собой радиомодем.
4. Система по п.1, отличающаяся тем, что она дополнительно снабжена фильтром, расположенным на входе обводной линии.
5. Система по п.1, отличающаяся тем, что она дополнительно снабжена двумя технологическими электроприводными задвижками, одна из которых расположена на входе в обводную линию, а другая технологическая электроприводная задвижка расположена на выходе из обводной линии.
6. Система по п.1, отличающаяся тем, что она дополнительно снабжена защитным кожухом в виде блок-бокса контейнерного типа.
7. Система по п.1, отличающаяся тем, что она дополнительно снабжена системой поддержания микроклимата, системой освещения, системой охранно-пожарной сигнализации и системой защиты, размещенными в защитном кожухе.
8. Способ контроля состояния трубопровода с гидравлическим энергетическим модулем, включающий сбор информации о параметрах системы, обработку ее, запись данных, передачу, прием, выработку сигнала на исполнительные механизмы, осуществление на центральном диспетчерском пункте контроля за обработанной информацией о параметрах системы, поступающей с микропроцессорного контроллера, сбор информации о параметрах системы и ее обработку осуществляют с выделением аварийных отклонений параметров системы в результате их сравнения в микропроцессорном контроллере, после чего в микропроцессорном контроллере производят формирование и выработку управляющего сигнала на исполнительные механизмы, при этом прием или передача информации о параметрах системы между микропроцессорным контроллером и центральным диспетчерским пунктом осуществляют посредством приемно-передающей аппаратуры, а аккумуляторные батареи осуществляют питание средств измерений, приемно-передающей аппаратуры, микропроцессорного контроллера и исполнительных механизмов, отличающийся тем, что осуществляют отбор транспортируемого продукта из основного трубопровода по обводной линии и возврат транспортируемого продукта в основной трубопровод по обводной линии, приведение в действие гидравлической турбины посредством заданного количества транспортируемого продукта, отобранного из основного трубопровода, а в качестве исполнительных механизмов используют электроприводную задвижку, зарядные устройства аккумуляторных батарей.
9. Способ по п.8, отличающийся тем, что он дополнительно осуществляет защиту от несанкционированного срабатывания узла электроприводной задвижки.
10. Способ по п.8, отличающийся тем, что он дополнительно осуществляет защиту технологического оборудования от механических примесей.
| RU 23047740 C2, 20.08.2007 | |||
| Способ контроля и регулирования режима работы трубопровода | 1990 |
|
SU1839706A3 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ НЕПРЕРЫВНОГО КОНТРОЛЯ ЗА РАБОТОЙ НАСОСНО-ТРУБОПРОВОДНОГО КОМПЛЕКСА ДЛЯ ПЕРЕКАЧКИ ВОДЫ И НЕФТЕПРОДУКТОВ | 1997 |
|
RU2165642C2 |
| ЭЛЕКТРОПРИВОД ЗАДВИЖКИ ТРУБОПРОВОДА | 0 |
|
SU374579A1 |
| US 4200911 A, 29.04.1980. | |||

