Настоящее изобретение относится к способу и устройству для оцифровки (дискретизации) импеданса и в частности к оцифровке сопротивления емкости дифференциального емкостного датчика перемещений.
Известно много типов датчика с импедансом, который изменяется в зависимости от свойства или физической величины, подлежащих измерению. Например, в патенте WO 02/061378 описан измерительный зонд, который включает в себя дифференциальные емкостные датчики для измерения перемещения. Известны также различные замкнутые схемы для преобразования импеданса таких датчиков в цифровую выходную величину, зависящую от импеданса. Пример такой схемы для работы с несколькими емкостными датчиками перемещения описан в патенте WO 89/09927.
В одном варианте реализации изобретения WO 89/09927 три дифференциальных емкостных датчика, управляются прямоугольными сигналами трех различных частот, которые генерируются соответствующими модуляторами управляющего сигнала. Сигналы от каждого из дифференциальных емкостных датчиков, когда последние активируются соответствующими прямоугольными сигналами, подают на общий вход электрометрического усилителя. Выходной сигнал электрометрического усилителя демодулируют тремя фазовыми детекторами, каждый из которых работает на частоте одного из прямоугольных управляющих сигналов. Каждый из фазовых детекторов, таким образом, выдает сигнал, который показывает любой токовый дисбаланс, связанный с движением соответствующего ему дифференциального датчика. Цепь обратной связи включают в схему каждого дифференциального емкостного датчика; она реагирует на любой измеренный токовый дисбаланс в соответствующем датчике и подает аналоговый сигнал обратно в соответствующий модулятор управляющего сигнала, вследствие чего входной сигнал электрометрического усилителя стремится к нулю. Каждый аналоговый сигнал обратной связи генерируется при подаче на отдельный цифро-аналоговый преобразователь цифрового выходного сигнала счетчика, который также является оцифрованным выходным сигналом датчика. Первым объектом настоящего изобретения является устройство для оцифровки импеданса, включающее:
первый импедансный элемент с первым импедансом, который изменяется в зависимости от свойства, подлежащего измерению;
второй импедансный элемент со вторым импедансом;
генератор управляющего сигнала для подачи первого знакопеременного управляющего сигнала на первый импедансный элемент и второго знакопеременного управляющего сигнала на второй импедансный элемент;
аналого-цифровой преобразователь (АЦП) для приема и оцифровки результирующего сигнала, причем результирующий сигнал представляет объединение сигналов, полученных при подаче первого и второго знакопеременных управляющих сигналов на первый и второй импедансный элемент,
в котором первый знакопеременный управляющий сигнал смещен по фазе относительно второго знакопеременного управляющего сигнала так, что результирующий сигнал, принятый и дискретизированный аналого-цифровым преобразователем, последовательно характеризует сумму и разность между первым и вторым импедансами;
отличающееся тем, что устройство содержит разделитель сигнала, который принимает считанные величины от АЦП и образует каналы суммы и разности, причем канал суммы содержит последовательность величин, характеризующих сумму первого и второго импеданса, и канал разности содержит последовательность величин, характеризующих разность между первым и вторым импедансом.
Настоящее изобретение, таким образом, относится к разомкнутой схеме (без обратной связи) для оцифровки первого импеданса первого импедансного элемента, причем первый импеданс изменяется в зависимости от свойства (например, перемещения), подлежащего измерению. Как более детально описано ниже, второй импеданс может также изменяться в зависимости от свойства (например, перемещения), подлежащего измерению, или по существу не изменяться в зависимости от этого свойства. С генератора управляющего сигнала первый и второй знакопеременные управляющие сигналы, такие как пара квадратурных прямоугольных сигналов, подают на первый и второй импедансные элементы. Сигналы, полученные в результате воздействия на первый и второй импедансы, объединяют (при необходимости с одним или более дополнительными сигналами, как описано ниже), и результирующий сигнал дискретизируют в АЦП.
Первый и второй знакопеременные управляющие сигналы сдвигают по фазе относительно друг друга. Подача сдвинутых по фазе управляющих сигналов, таких как квадратурные прямоугольные сигналы, на первый и второй импедансы предоставляет возможность выделить информацию о сумме и разности этих импедансов из отсчетов результирующего сигнала, полученных в АЦП. В частности, результирующий сигнал, полученный и оцифрованный аналого-цифровым преобразователем, последовательно характеризует сумму и разность между первым и вторым импедансами. АЦП, таким образом, может генерировать последовательность считанных (т.е. цифровых) величин, которые характеризуют либо сумму, либо разность значений. Например, АЦП может быть соответствующим образом синхронизирован первым и вторым знакопеременными управляющими сигналами, чтобы вывести одну или более цифровых величин, представляющих сумму и разность первого и второго импеданса, по очереди.
Устройство также содержит разделитель сигнала, который принимает цифровые величины с АЦП и образует канал суммы и канал разности. Разделитель сигнала может содержать схему фазового детектора (ФД) и может также принимать первый и второй управляющие сигналы. Канал суммы (суммирующий канал) или поток данных может содержать последовательность величин, характеризующих сумму первого и второго импедансов. Канал разности или поток данных может содержать последовательность величин, характеризующих разность между первым и вторым импедансами. Разделитель сигнала может быть скомпонован для включения повторяющихся значений в каналы суммы и/или разности, например, чтобы обеспечить постоянный поток битов данных можно подать его на соответствующий фильтр. Если величины суммы и/или разности имеют разные знаки (например, принимают отрицательные и положительные значения), то знак величин можно также инвертировать по мере необходимости. Значения, содержащиеся в каналах суммы и разности можно обработать, чтобы получить информацию об изменениях относительных величин первого и второго импедансов. Как описано ниже, эту информацию можно использовать, чтобы обеспечить надежные измерения свойства (например, перемещения), подлежащего измерению. Установлено, что разомкнутая конфигурация настоящего изобретения устраняет по меньшей мере некоторые недостатки систем предыдущего уровня техники (замкнутых систем), упомянутых выше. Например, в настоящем изобретении используется АЦП, который обычно вносит меньше шума и обладает более низким энергопотреблением по сравнению с ЦАПами систем предыдущего уровня техники. Разомкнутая схема к тому же, в отличие от замкнутых систем предыдущего уровня техники, не требует некоторого времени для выхода на рабочий режим после включения и может, следовательно, быть активизирована только при необходимости, сберегая таким образом дополнительную энергию.
Делитель может также успешно работать в сочетании с разделителем сигнала для деления величин из канала разности на величины из канала суммы, тем самым образуя поток выходных данных. Выходные величины могут, следовательно, характеризовать отношение разности между первым и вторым импедансами к сумме первого и второго импедансов. Предпочтительно располагать величины, содержащиеся в каналах суммы и разности, таким образом, чтобы каждое деление (результат деления) было уникальным.
Предпочтительно, чтобы устройство содержало по меньшей мере один цифровой фильтр. Если скорость измерений устройства не критична, то цифровой фильтр можно применить для децимации отсчетов. Например, чтобы получить выходную величину, несколько отсчетов суммы и разности, полученных в АЦП, можно накопить и усреднить при помощи цифрового фильтра. Если разделитель сигнала включен в схему, чтобы образовать каналы суммы и разности, как описано выше, то по меньшей мере один цифровой фильтр можно поместить перед, или после делителя, который используется для объединения таких каналов. По меньшей мере один цифровой фильтр может быть с конечной импульсной характеристикой (КИХ). Его можно применить к потоку величин разность/сумма, полученных в делителе вышеупомянутого типа. Для улучшения показателя сигнал/шум устройства можно использовать цифровую фильтрацию, возможно объединенную с передискретизацией АЦП.
Генератор управляющего сигнала может быть любого подходящего типа. Первый и второй знакопеременные управляющие сигналы, подаваемые на первый и второй импедансы, могут быть любой формы. Например, первый и/или второй знакопеременные управляющие сигналы могут быть прямоугольной формы, синусоидальной формы, треугольной формы и т.д. Предпочтительно, чтобы форма первого знакопеременного управляющего сигнала по существу была такой же, как и форма второго знакопеременного управляющего сигнала. Желательно, чтобы отношение амплитуд первого и второго знакопеременных управляющих сигналов были приблизительно или по существу постоянными в процессе работы. Предпочтительно, чтобы амплитуда первого знакопеременного управляющего сигнала приблизительно или по существу была такой же, как и амплитуда второго знакопеременного управляющего сигнала. Как отмечено выше, второй знакопеременный управляющий сигнал сдвинут по фазе относительно первого знакопеременного управляющего сигнала, и предпочтительно, чтобы этот фазовый сдвиг между первым и вторым знакопеременным управляющим сигналом приблизительно или по существу не менялся в процессе работы. Предпочтительно, чтобы второй знакопеременный управляющий сигнал был сдвинут по существу на 90° относительно первого знакопеременного управляющего сигнала, т.е. предпочтительно, чтобы первый и второй знакопеременные управляющие сигналы были сдвинуты на четверть периода. Первый и второй знакопеременные управляющие, или синхронизирующие, сигналы, полученные таким образом, можно также передавать на разделитель сигнала для управления процессом разделения величин суммы и разности на потоки суммы и разности с использованием фазового детектора.
Различные сигналы, используемые в устройстве (например, знакопеременные управляющие сигналы и/или сигналы, используемые в любом фазовом детекторе), можно получить от одного источника. Например, устройство может включать в себя задающий генератор. Генератор управляющего сигнала может включать в себя задающий генератор или вход для приема тактового сигнала от подобного задающего генератора.
Предпочтительно, чтобы устройство содержало дифференциальный датчик с первым и вторым импедансными элементами. Как первый импеданс, так и второй импеданс может к тому же изменяться в зависимости от свойства (например, перемещения), подлежащего измерению; в такой схеме первый и второй импедансные элементы могут иметь отдельные входы для приема первого и второго управляющих сигналов и общий сигнальный электрод или выход датчика.
Однако настоящее изобретение можно также применять в так называемых несимметричных датчиках при помощи отдельного, например, по существу постоянного, второго импеданса. В таком случае предусмотрена возможность включения в датчик первого импедансного элемента. Второй импедансный элемент при этом можно изолировать от датчика, например, второй импеданс второго импедансного элемента может не меняться со свойством, измеряемым датчиком.
Устройство можно использовать для оцифровки импеданса любого типа, например, индукционного, резистивного или емкостного. Предпочтительно, чтобы первый импедансный элемент имел только один импедансный компонент, который изменяется в зависимости от свойства, подлежащего измерению. Предпочтительно, чтобы первый и второй импедансные элементы содержали первый и второй емкостные элементы. Например, емкостные элементы могут составлять часть датчика перемещения как те которые описаны ранее в WO 89/09927 и WO 02/061378.
Предпочтительно, чтобы устройство содержало электрометрический усилитель. Это удобно, поскольку электрометрический усилитель имеет общий вход для приема сигнала от каждого из первого и второго импедансных (например, емкостных) элементов и вырабатывает на их основе результирующий сигнал, который подают на АЦП. Электрометрический усилитель может содержать импеданс обратной связи (например, емкость обратной связи).
Устройство может включать первый импедансный элемент, который составляет участок датчика для измерения любого требуемого свойства. Предпочтительно, чтобы устройство содержало датчик перемещения, который включает в себя по меньшей мере первый импедансный элемент, в котором первый импеданс первого импедансного элемента изменяется при перемещении участка датчика перемещения. Как отмечено выше, если предусмотрен дифференциальный датчик, то второй импеданс может также изменяться (например, противоположно первому импедансу) при перемещении участка датчика перемещения.
Настоящее изобретение может также обеспечить многоканальное, или мультиплексное, управление. Предпочтительно, устройство может, таким образом, содержать третий импедансный элемент с третьим импедансом, который изменяется в зависимости от второго свойства, подлежащего измерению, и четвертый импедансный элемент с четвертым импедансом. Четвертый импеданс может также изменяться в зависимости от второго свойства, подлежащего измерению, или не меняться при этом. Предпочтительно, чтобы с генератора управляющего сигнала третий знакопеременный управляющий сигнал подавался на третий импедансный элемент и четвертый знакопеременный управляющий сигнал на четвертый импедансный элемент. Предпочтительно, чтобы аналого-цифровой преобразователь принимал результирующий сигнал, содержащий также сигналы, полученные при подаче третьего и четвертого знакопеременных сигналов на третий и четвертый импедансные элементы.
Методы временного и/или частотного мультиплексирования можно использовать для разделения импедансных свойств, связанных с первым и вторым импедансными элементами, от импедансных свойств третьего и четвертого элементов.
Чтобы осуществить частотное мультиплексирование, первый и второй знакопеременные управляющие сигналы могут иметь первую частоту, а третий и четвертый знакопеременные сигналы могут иметь вторую (другую) частоту. Предпочтительно, чтобы первая и вторая частоты были гармонически сопряженными, но ни одна из нечетных гармоник, предпочтительно, не совпадает. Основные свойства (например, форма, амплитуда, относительные фазы и т.д.) первого и второго знакопеременных управляющих сигналов аналогичны основным свойствам третьего и четвертого знакопеременных управляющих сигналов. В предпочтительном варианте выполнения первый и второй знакопеременные управляющие сигналы могут состоять из пары квадратурных управляющих сигналов одной частоты (например, f), а третий и четвертый знакопеременные управляющие сигналы могут состоять из пары квадратурных управляющих сигналов другой частоты (например, 2f).
В устройствах с частотным мультиплексированием на АЦП можно подать результирующий сигнал, который в любой момент времени состоит из объединения сигналов, полученных при подаче первого, второго, третьего и четвертого сигналов на первый, второй, третий и четвертый импедансный элемент. Соответствующий набор отсчетов из АЦП можно затем анализировать, чтобы получить раздельную информацию относительно первого и второго импедансов и третьего и четвертого импедансов, при этом фазовый детектор (ФД) можно повторно использовать для разделения информации из разных частотных каналов.
В такой системе можно также осуществить схему с временным мультиплексированием, при этом первый результирующий составляющий сигнал можно получить подачей первого и второго знакопеременных управляющих сигналов на первый и второй импедансные элементы. Второй результирующий составляющий сигнал можно также получить подачей третьего и четвертого знакопеременных сигналов на третий и четвертый импедансные элементы. Таким образом, результирующий сигнал, подаваемый на АЦП, можно образовать из последовательности сегментов, которые попеременно характеризуют первый и второй импедансы и третий и четвертый импедансы. Например, можно предусмотреть переключатель, который обеспечивает подачу первой и второй составляющих сигналов на вход АЦП по очереди.
Таким образом, устройство с мультиплексированием может содержать первый сенсорный канал с первым и вторым импедансными элементами и второй сенсорный канал с третьим и четвертым импедансными элементами. Таким образом, первый и второй сенсорные каналы могут включать в себя первый и второй датчики для измерения первого и второго свойства. Например, в первом и втором сенсорных каналах можно измерять перемещение вдоль первой и второй осей соответственно.
Хотя здесь подробно описана двухканальная реализация, следует отметить, что можно осуществить любой уровень мультиплексирования. Другими словами, третий, четвертый, пятый и т.д. сенсорный канал можно при необходимости добавить. Например, устройство может содержать по меньшей мере одну дополнительную пару импедансных элементов, в которых по меньшей мере один импедансный элемент каждой пары имеет импеданс, изменяющийся в зависимости от дополнительного свойства, подлежащего измерению. Каждой из этих дополнительных пар импедансных элементов можно управлять при помощи дополнительных знакопеременных управляющих сигналов. При этом, используя временное и/или частотное мультиплексирование, как описано выше, можно в результирующий сигнал, подаваемый на АЦП, также включать сигналы, полученные при подаче дополнительных управляющих сигналов на дополнительные импедансные элементы.
Видно, что в отличие от замкнутых систем предыдущего уровня техники, в которых каждому сенсорному каналу требуется отдельный ЦАП, настоящее изобретение обеспечивает мультиплексирование, осуществляемое при использовании единственного АЦП. Также видно, что настоящее изобретение обеспечивает еще большее сбережение энергии при использовании схемы мультиплексирования.
Настоящее изобретение также относится к прибору для линейных и угловых измерений, используемых совместно с координатомером (например, координатно-измерительным станком или машиной): прибору, содержащему устройство описанного выше типа для оцифровки импеданса. Предпочтительно, чтобы измерительный прибор был подготовлен для измерения вдоль по меньшей мере одной оси. Удобно, чтобы измерительный прибор был подготовлен для измерения вдоль по меньшей мере двух, а еще лучше трех осей.
Предпочтительно измерительный прибор может содержать измерительный зонд или измерительную головку с шариковым наконечником.
Согласно вторыму объекту настоящего изобретения, предлагается способ для оцифровки импеданса, содержащий стадии:
(i) подача первого знакопеременного управляющего сигнала на первый импедансный элемент с первым импедансом, изменяющимся в зависимости от свойства, подлежащего измерению, и подача второго знакопеременного управляющего сигнала на второй импедансный элемент со вторым импедансом, при этом первый знакопеременный управляющий сигнал сдвинут по фазе относительно второго знакопеременного управляющего сигнала;
(ii) генерирование результирующего сигнала путем объединения сигнала, полученного при подаче первого знакопеременного управляющего сигнала на первый импедансный элемент, с сигналом, полученным при подаче второго знакопеременного управляющего сигнала на второй импедансный элемент;
(iii) применение аналого-цифрового преобразователя для преобразования результирующего сигнала в последовательность считанных величин,
отличающийся тем, что имеется стадия (iv) образования канала суммы и канала разности из считанных величин, причем канал суммы состоит из последовательности величин, характеризующих сумму первого и второго импеданса, а канал разности состоит из последовательности величин, характеризующих разность между первым и вторым импедансом.
Согласно третьему объекту настоящего изобретения, предлагается прибор для линейных и угловых измерений, используемый совместно с координатомером, содержащий:
датчик перемещения, содержащий первый импедансный элемент с первым импедансом, который изменяется в зависимости от перемещения, подлежащего измерению;
второй импедансный элемент со вторым импедансом;
генератор управляющего сигнала для подачи первого знакопеременного управляющего сигнала на первый импедансный элемент и второго знакопеременного управляющего сигнала на второй импедансный элемент;
и аналого-цифровой преобразователь (АЦП) для приема и оцифровки результирующего сигнала, результирующий сигнал состоит из объединения сигналов, полученных путем подачи первого и второго знакопеременных управляющих сигналов на первый и второй импедансные элементы.
Желательно, чтобы датчик перемещения представлял собой дифференциальный датчик, содержащий первый и второй импедансные элементы, при этом оба импедансных элемента - первый и второй - изменялись бы в зависимости от перемещения, подлежащего измерению. Предпочтительно, чтобы прибор содержал третий импедансный элемент с третьим импедансом, который изменяется в зависимости от свойства, подлежащего измерению, и четвертый элемент с четвертым импедансом, при этом с генератора управляющего сигнала третий знакопеременный управляющий сигнал подавался на третий импедансный элемент, а четвертый знакопеременный управляющий сигнал на четвертый импедансный элемент, причем на АЦП подавался результирующий сигнал, состоящий из сигналов, полученных при подаче третьего и четвертого управляющих сигналов на третий и четвертый импедансные элементы. Удобно, чтобы первый и второй знакопеременные управляющие сигналы представляли собой квадратурные прямоугольные сигналы. Предпочтительно, чтобы первый и второй импедансные элементы состояли из первого и второго емкостных элементов.
Согласно четвертому объекту настоящего изобретения, представлена разомкнутая схема для оцифровки выходного сигнала по меньшей мере одного датчика с переменным импедансом, схема содержит управляющее устройства для генерации первого и второго знакопеременных управляющих сигналов, первый знакопеременный управляющий сигнал для подачи на первый импедансный элемент соответствующего датчика и второй знакопеременный управляющий сигнал для подачи на второй импедансный элемент, отличающаяся тем, что схема содержит аналого-цифровой преобразователь с входом для приема результирующего сигнала, полученного объединением сигналов, образованных при подаче первого и второго управляющих сигналов на первый и второй импедансные элементы.
Также описано устройство для оцифровки импеданса, которое содержит первый импедансный элемент, имеющий первый импеданс, изменяющийся в зависимости от свойства, подлежащего измерению, второй импедансный элемент, имеющий второй импеданс, генератор управляющего сигнала для подачи первого знакопеременного управляющего сигнала на первый импедансный элемент и второго знакопеременного управляющего сигнала на второй импедансный элемент, устройство содержит аналого-цифровой преобразователь (АЦП) для приема и оцифровки результирующего сигнала, причем результирующий сигнал образован объединением сигналов, полученных при подаче первого и второго знакопеременных управляющих сигналов на первый и второй импедансные элементы. Такое устройство может дополнительно включать любые один или более признаки первого объекта изобретения, которые описаны здесь.
Важно отметить, что описание различных компонентов устройства, которое приведено здесь, не ограничивает способ практической реализации изобретения. Например, различные компоненты устройства, отмеченные выше, для генерации и анализа сигналов можно проектировать, используя элементы цифровой схемы, и/или можно внедрять, используя соответствующим образом программное и/или аппаратное обеспечение элементной базы. Например, генерацию и/или анализ сигнала можно выполнить, используя программируемую пользователем вентильную матрицу (ППВМ), цифровой процессор сигналов или соответствующим образом запрограммированный процессор. Специалисты хорошо знают немало различных дополнительных доступных вариантов практической реализации изобретения. Ниже приводится описание данного изобретения только в качестве примера и со ссылкой на следующие прилагаемые чертежи:
фиг.1 - блок-схема, иллюстрирующая общепринятый принцип действия замкнутой схемы из уровня техники для оцифровки дифференциального емкостного датчика;
фиг.2 иллюстрирует разомкнутую схему настоящего изобретения для оцифровки дифференциального емкостного датчика;
фиг.3 иллюстрирует управляющий и результирующий сигналы схемы по фиг.2;
фиг.4 иллюстрирует процесс удвоения отсчетов;
фиг.5 иллюстрирует разомкнутую схему настоящего изобретения для оцифровки пары дифференциальных емкостных датчиков;
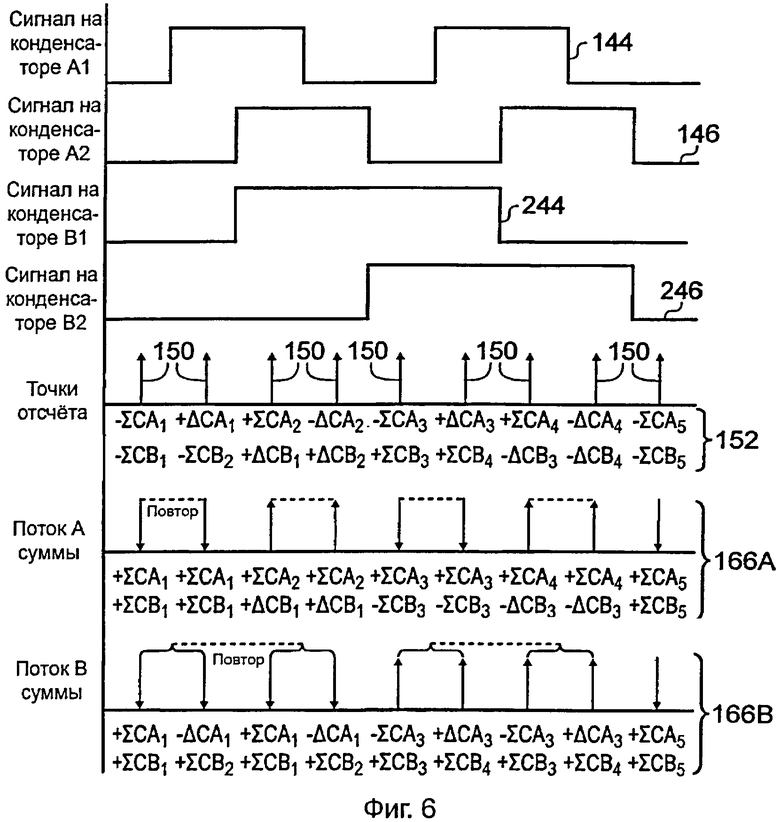
фиг.6 иллюстрирует различные сигналы схемы по фиг.5;
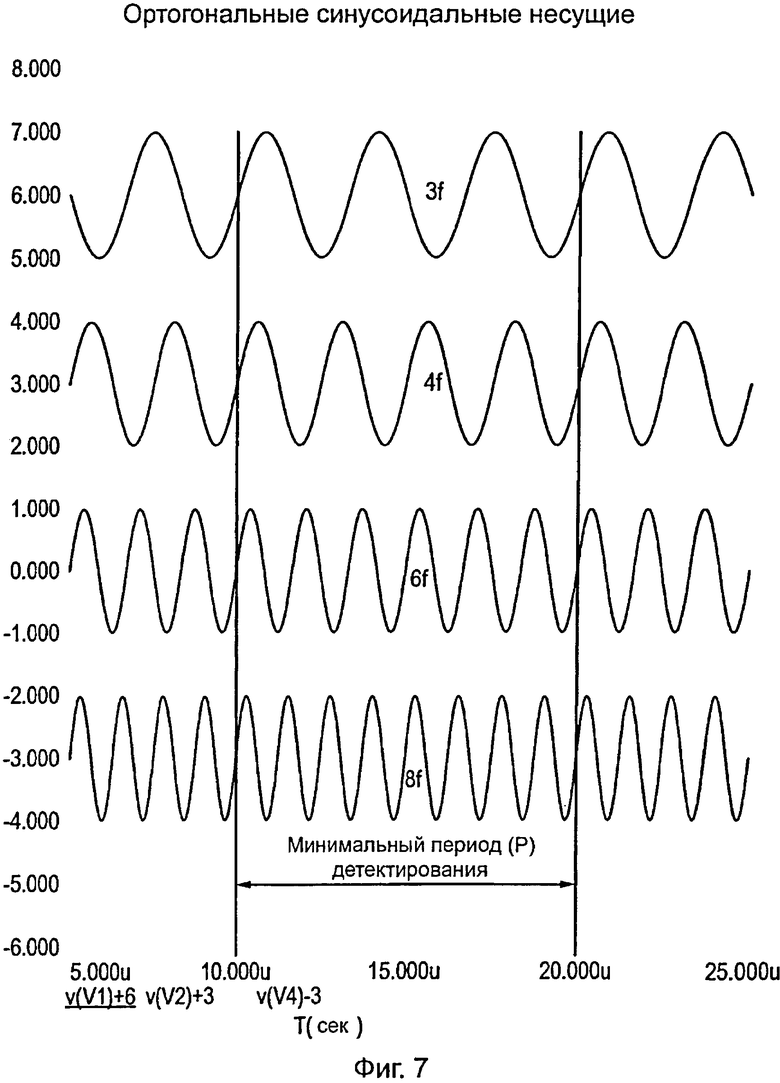
фиг.7 иллюстрирует подходящий набор ортогональных управляющих сигналов.
На фиг.1 показана упрощенная блок-схема, представляющая принцип работы устройства предшествующего уровня техники, описанного в патенте WO 89/09927, в котором осуществляется оцифровка сопротивления емкости дифференциального емкостного датчика с использованием замкнутой схемы или схемы с обратной связью.
Дифференциальный емкостный датчик 2 содержит общую пластину 4, первую управляющую пластину 6 и вторую управляющую пластину 8. Таким образом, между общей пластиной и первой и второй управляющими пластинами 6 и 8 существуют емкости С1 и С2 соответственно. Во время работы первую и вторую управляющие пластины можно перемещать относительно общей пластины 4, изменяя, таким образом, емкости С1 и С2. Изменение емкостей С1 и С2 приводит к возможности измерения перемещения датчика по оси.
Чтобы измерить емкости С1 и С2, модулятор 10 подает прямоугольное напряжение на первую подвижную пластину 6 и инвертированное прямоугольное напряжение на вторую подвижную пластину 8. Прямоугольное напряжение и инвертированное прямоугольное напряжение имеют амплитуды +Vref и -Vref соответственно, и обе амплитуды смещают подачей постоянного напряжения VF обратной связи.
Результирующий сигнал от общей пластины 4 принимается и усиливается электрометрическим усилителем 12. Таким образом, на выходе электрометрического усилителя появляется результирующий сигнал Vres, который зависит от любого токового дисбаланса между двумя управляемыми емкостями С1 и С2 дифференциального емкостного датчика 2.
Результирующий аналоговый сигнал Vres передают на счетчик 14 с цифровым выходом 16. Цифровой выходной сигнал 16 также передается на цифро-аналоговый преобразователь (ЦАП) 18 и преобразовывается в аналоговый сигнал VF обратной связи, который подается обратно на модулятор 10.
В счетчике 14 полученный результирующий аналоговый сигнал Vres используется для увеличения или уменьшения значения выходного цифрового сигнала таким образом, чтобы результирующий аналоговый сигнал стремился к нулю и, вследствие чего, снизился любой токовый дисбаланс, вызванный двумя сдвинутыми емкостями С1 и С2. Здесь используется замкнутая система с обратной связью, в которой выходной цифровой сигнал 16 пропорционален отношению C1-С2 к С1+С2, а это отношение, в свою очередь, пропорционально перемещению первой и второй управляющих пластин датчика относительно общей пластины 4.
Следует отметить, что вышеизложенное - это упрощенное описание основ схемы с обратной связью, описанной в патенте WO 89/09927. Дополнительно следует отметить, что многоканальные системы, основанные на тех же вышеизложенных принципах, также описаны в патенте WO 89/09927. Более полную информацию по дифференциальным датчикам, пригодным для использования в измерительных зондах, также можно найти в патенте WO 02/061378. Все материалы патентов WO 89/09927 и WO 02/061378, в частности описание дифференциальных датчиков, встречающиеся здесь, включены сюда посредством ссылки.
Хотя замкнутые системы вышеописанного типа обычно работают удовлетворительно, авторы настоящего изобретения обнаружили, что эти системы все же имеют ряд существенных недостатков. Например, ЦАПы обычно довольно энергоемкие и могут действовать как большая энергосливная труба в устройстве, работающем от батарейки; особенно это относится к многоканальным системам, в которых требуется один ЦАП на канал датчика. К тому же, в замкнутых системах после включения требуется определенный промежуток времени для выхода на рабочий режим, вследствие чего, уменьшается возможность сбережения энергии путем отключения схемы на период времени, когда проведение измерений не требуется.
На фиг.2-4 описана разомкнутая схема оцифровки сопротивления емкости по настоящему изобретению, в частности: на фиг.2 приведена функциональная схема, в то время как на фиг.3 и 4 показаны различные сигналы, генерируемые во время работы схемы.
Как показано на фиг.2, схема содержит дифференциальный емкостный датчик 20 с первой и второй емкостными элементами 22 и 24 емкостью C1 и С2 соответственно. Дифференциальный емкостный датчик 20 может быть известного вышеупомянутого типа; например, это может быть датчик перемещения измерительного зонда.
Генератор управляющего сигнала включает в себя выход 26 первого управляющего сигнала и выход 30 второго управляющего сигнала. С выхода 26 первого управляющего сигнала прямоугольный управляющий сигнал подают на управляющую пластину 28 первого емкостного элемента 22. С выхода 30 второго управляющего сигнала прямоугольный управляющий сигнал подают на управляющую пластину 32 второго емкостного элемента 24. Первый и второй прямоугольные управляющие сигналы образуют пару квадратурных прямоугольных сигналов. Другими словами второй прямоугольный управляющий сигнал смещен по фазе на 90° относительно первого прямоугольного управляющего сигнала.
Обе сигнальные пластины 34 и 36 первого и второго емкостных элементов 22 и 24 соединяют на общем входе 38 электрометрического усилителя 40. Результирующий сигнал 41 выводится из электрометрического усилителя 40 и подается на аналого-цифровой преобразователь или АЦП 42. Емкость обратной связи Cf также включают в схему между выходом и входом электрометрического усилителя.
Как упомянуто выше, первый и второй прямоугольные управляющие сигналы, используемые для активации емкостей С1 и С2, представляют собой квадратурные сигналы. Использование квадратурных сигналов предпочтительно, но существенного значения не имеет, хотя это минимизирует эффекты смещения постоянной составляющей и другие подобные ошибки (например, смещения амплитуды несущей) в электрометрическом усилителе 40 и АЦП 42. На фиг.3 и 4 представлен синфазный (I) сигнал 44, который передают на первый емкостный элемент 22 и квадратурный (Q) сигнал, который передают на второй емкостный элемент 24. В результате такой квадратурной активации емкостей С1 и С2 на выходе электрометрического усилителя 40 появляется результирующий (аналоговый) сигнал, состоящий из серии чередующихся отрицательных и положительных сумм и разностей емкостей С1 и С2. Пример результирующего сигнала 41 на выходе электрометрического усилителя 40 показан в виде временной диаграммы 47 на фиг.4. Данные о емкости, полученные по значениям этих сумм и разностей, в общем представляют в виде потока данных 48, показанного на фиг.3.
АЦП 42 включают в схему, чтобы дискретизировать результирующий сигнал 41, полученный с электрометрического усилителя 40. В качестве примера на фиг.4 стрелками 50, направленными к графику 52 результирующего сигнала 41, показаны точки отсчета, применяемые в АЦП 42.
Как видно из фиг.4, точки отсчета связаны с последовательностью чередующихся сумм и разностей. В частности, на графике 52 фиг.4 результирующего сигнала показана последовательность данных на выходе АЦП. Эта последовательность содержит первое значение суммы (+ΣC1), первое значение разности (-ΔC1), второе значение суммы (-ΣС3), второе значение разности (+ΔС2), третье значение суммы (+ΣС3), третье значение разности (-ΔС3), четвертое значение суммы (-ΣC4), четвертое значение разности (+ΔС4) и пятое значение суммы (+ΣC5). Следует отметить, что чередование знаков суммы и разности является условным и не влияет на информацию, содержащуюся в таких сигналах.
Снова ссылаясь на фиг.2, поток считанных величин, полученных в АЦП 42, передают в схему анализа сигнала 54. В настоящем варианте выполнения схема анализа сигнала 54 собрана с использованием программируемой пользователем вентильной матрицы (ППВМ), хотя следует признать, что она может быть реализована и другим подходящим способом (например, с использованием процессора цифровых сигналов или соответствующим образом запрограммированным микропроцессором). Схема анализа сигнала 54 включает в себя квадратурный инвертор 56, который инвертирует и разделяет чередующуюся последовательность значений суммы и разности на поток суммы 58 и поток разности 60. АЦП 42 вместе с квадратурным инвертором 56 выполняет функцию фазового детектора. В делителе 62 осуществляется деление потока 60 разности на поток 58 суммы. Таким образом, на выходе делителя 62 образуется последовательность чисел, каждая из которых описывает отношение разности емкостей С1-С2 к сумме емкостей С1+С2.
Выходной сигнал делителя 62 передают на цифровой фильтр 64 (отмечая, что альтернативно цифровой фильтр может быть расположен и перед делителем). В этом примере используется цифровой фильтр 64 с конечной импульсной характеристикой (КИХ) для обнаружения кратковременных сигналов. Действие цифрового фильтра 64 основано на функции приподнятого косинуса (cosinen); такая функция проста в реализации, и ее использование гарантирует отсутствие выброса при скачкообразном изменении. Более того, изменением величины «n» можно легко управлять затуханием в полосе пропускания и полосе задерживания. В этом примере цифровой фильтр 64 обеспечивает затухание в 100 дБ в полосе задерживания при разрешении 20 битов. Цифровой фильтр 64 к тому же вносит минимальную задержку, и таким образом сведение к минимуму задержки в фильтре обеспечивает максимальное быстродействие системы (что часто важно для систем, чувствительных к перемещению, таких как измерительные зонды), а также упрощает логическую схему. К тому же следует отметить, что время обнаружения сигнала также задается числом отсчетов или точек, которыми заполняется цифровой фильтр 64 после того, как все эти отсчеты сделаны. Цифровой фильтр 64 в этом примере рассчитан на 15 или 25 точек. Использование цифрового фильтра 64 также повышает разрешение системы за счет использования скользящей средней сигнала и, кроме того, предоставляет возможность задавать скорость обработки системы.
Цифровой фильтр 64, описанный выше, рассчитан на прием непрерывного потока данных из делителя 62. Непрерывный поток данных достигается повторением суммы и разности в выходных данных, при этом за счет удвоения отсчетов поддерживается скорость дискретизации и сводится к минимуму потеря информации; в частности, поток 58 суммы, как представлено на схеме 66 на фиг.4, содержит значение суммы в каждой точке отсчета АЦП. Это осуществляется повторением каждого значения суммы в следующей точке отсчета (т.е. где новое значение суммы еще не появляется). Аналогично поток 60 разности, как представлено на схеме 68 фиг.4, содержит значение разности в каждой точке отсчета АЦП, что опять же достигается повторением значения каждой разности в следующей точке отсчета. Следует также отметить, что на схемах 66 и 68 фиг.4 стрелками вниз показаны инвертированные отсчеты, в то время как стрелками вверх показаны не инвертированные отсчеты. Таким образом, на вход делителя 62 подают потоки суммы и разности, которые образованы с использованием повторяющихся отсчетов, но, тем не менее, каждое деление является уникальным. Схема 70 выходных данных делителя также показана на фиг.4. Непрерывный поток выходных данных делителя 62 также представляют в формате, который может быть легко принят и обработан при помощи цифрового фильтра 64.
Отмечено, что любые ошибки, связанные с отклонением постоянной составляющей, приведут к дрейфу нуля и изменению цены деления шкалы так, что оба эти фактора усредняются по четырем отсчетам. Хотя в упомянутых выше фильтрах с КИХ имеется нечетное число точек, в них, тем не менее, значительно уменьшаются подобные ошибки. Например, использование фильтра длиной в 15 точек уменьшает ошибки более чем на два порядка. Ошибка типового 16-битного АЦП в 1,6 мВ или 20 битов может быть таким образом уменьшена до менее, чем в 1 бит на 18. Следует отметить, что делитель 62 можно конфигурировать на реализацию других, более сложных схем деления. Например, можно использовать более сложную схему, представленную ниже выражением (1), причем эта схема полностью исключает любые ошибки, связанные с отклонением постоянной составляющей, и в то же время также поддерживая скорость дискретизации и производя уникальные деления.

Другой потенциальный источник ошибки в разомкнутой схеме настоящего изобретения возникает из-за колебаний амплитуды квадратурных сигналов. В частности, обнаружено, что колебания амплитуды несущей вызваны ошибкой, которая пропорциональна выражению:
где е - относительная разность между амплитудами. Колебания амплитуды несущей этого типа существенно не уменьшаются в цифровом фильтре, но могут быть исключены процессом калибровки. Пока амплитуды двух несущих не повторяются с течением времени и при изменении температуры калибровочный процесс, возможно, придется повторить. Например, калибровку можно проводить с использованием АЦП, чтобы контролировать амплитуду несущих, используя внутренний калибровочный цикл. В настоящем изобретении используются прямоугольные сигналы для управления емкостями, потому что квадратурные несущие одинаковой амплитуды таких сигналов легче получить и потому что эти сигналы легче дискретизируются. Однако важно отметить, что можно было бы использовать сигналы и других форм (например, синусоидальной или треугольной формы).
Следует отметить, что на фиг.4 представлена одна точка отсчета на квадрант, причем это наименьшее число точек отсчета, которые могут быть использованы, и это также самое простое решение. Если по желанию объединить дискретизацию с соответствующей цифровой фильтрацией, то возможно провести дискретизацию с более высокой скоростью, при которой можно повысить разрешение выше той, что достигнуто в АЦП 42. Следует также отметить, что такая передискретизация требует также некоторого уплотнения величин суммы/разности, чтобы соответствующим образом их скорректировать, например, сохранить уникальность делений.
Хотя разомкнутая конфигурация настоящего изобретения увеличиваей сложность цифровой обработки сигналов по сравнению с желаемой, но оказалось, что это с избытком компенсируется другими преимуществами. Например, преимущество способа по настоящему изобретению над системами предыдущего уровня техники, представленными на фиг.1, является исключение ЦАП, приводящее к сбережению энергии и снижению шума. К тому же АЦП обычно имеет более линейную характеристику, чем ЦАП. Более того, для замкнутых систем всегда требуется какое-то время после включения перед достоверным сопровождением входного сигнала (т.е. время установления обратной связи). Разомкнутая система по настоящему изобретению напротив может быть приведена в действие по требованию (т.е. показание системы достоверно, как только фильтр заполнится: через 15 или 25 отсчетов), сохраняя, таким образом, еще больше энергии. Кроме того, настоящее изобретение позволяет использовать более высокие напряжения управляющих сигналов, дополнительно улучшая тем самым отношение сигнал/шум, и также легко можно улучшить разрешение системы путем повышения скорости АЦП.
Следует также отметить, что разомкнутая схема, описанная в настоящем изобретении, не обязательно внедрять с использованием описанных выше способов: высокими скоростями, сегментацией или разнесением. Если более низкая скорость выходных данных устройства приемлема, то можно было бы провести упрощенный анализ (например, децимацией дискретизации) величин суммы и разности, полученных в АЦП. Например, чтобы получить выходные данные, характеризующие импеданс в виде отношения сумма/разность можно отобрать по четыре смежные величины сумма/разность и последовательно вычислять по ним среднее отношение сумма/разность, другими словами, можно было бы хранить и обрабатывать многие отсчеты за более короткое время. Этот упрощенный, но замедленный, способ также исключал бы необходимость в энергозатратном КИХ фильтре или подобном.
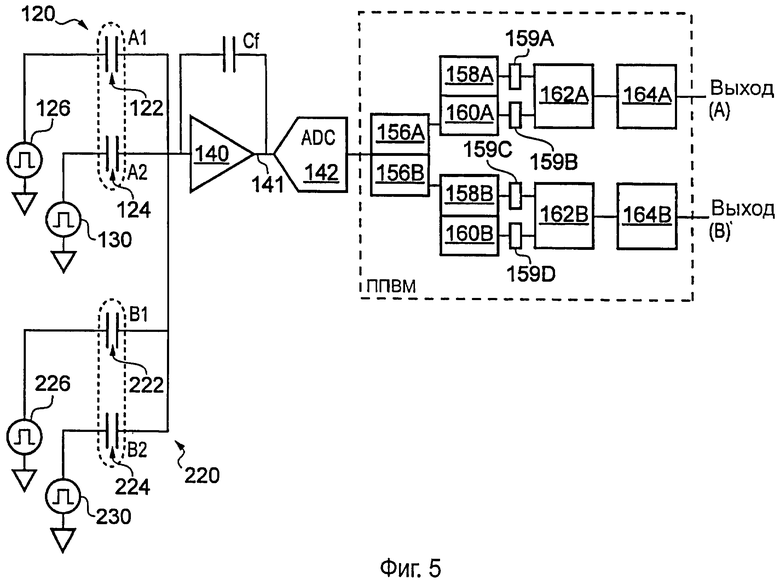
На фиг.5 и 6 представлен другой вариант выполнения изобретения с мультиплексированием многоканальных датчиков в одном электрометрическом усилителе и АЦП.
Схема, показанная на фиг.5, содержит первый дифференциальный емкостный датчик 120 и второй дифференциальный емкостный датчик 220. Первый дифференциальный емкостный датчик 120 содержит первый и второй емкостные элементы 122 и 124 емкостью А1 и А2. Второй дифференциальный емкостный датчик 220 содержит третий и четвертый емкостные элементы 222 и 224 емкостью В1 и В2. Генератор управляющего сигнала также выдает первый, второй, третий и четвертый составляющие 126, 130, 226 и 230 управляющего сигнала для подачи прямоугольного напряжения на первый, второй, третий и четвертый емкостные элементы 122, 124, 222 и 224 соответственно.
Сигнал, полученный в результате подачи управляющих сигналов на первый, второй, третий и четвертый емкостные элементы 122, 124, 222 и 224, подается на общий вход 138 электрометрического усилителя 140. Результирующий сигнал 141 выводят из электрометрического усилителя 140 и подают на АЦП 142. Также включают в схему емкость обратной связи Cf между выходом и входом электрометрического усилителя.
Таким образом, как видно из фиг.5, мультиплексирование осуществляется подачей сигналов от каждого из четырех емкостных элементов на один электрометрический усилитель 140. Это создает дополнительный шум по сравнению с подачей на электрометрический усилитель сигналов только от двух емкостных элементов, но такой эффект можно свести к пренебрежимо малой величине. Хотя на фиг.5 показан один электрометрический усилитель, альтернативно возможно включение отдельного электрометрического усилителя для каждого датчика. Результирующие компоненты сигнала от каждого электрометрического усилителя могут быть поданы на АЦП параллельно или каждый компонент сигнала может быть подан последовательно. На фиг.6 представлены первая и вторая квадратурные прямоугольные управляющие сигналы 144 и 146 первой частоты 2f, которые приложены к первому и второму емкостным элементам 122 и 124 соответственно. На фиг.6 также показаны третий и четвертый квадратурные прямоугольные управляющие сигналы 244 и 246 второй, более низкой, частоты f, которые приложены к третьей и четвертой емкостным элементам 222 и 224 соответственно. Результирующий сигнал 141, полученный в электрометрическом усилителе 140, подают на АЦП 142, где он подвергается дискретизации.
АЦП 142 включают в схему, чтобы провести отсчет в каждой четверти периода самого высокочастотного (2f) прямоугольного сигнала. Точки отсчета АЦП представлены на фиг.6 стрелками 150, где они также представляют поток или последовательность считанных величин 152, полученных в АЦП 142. Последовательность считанных величин 152 содержит первую считанную величину, полученную объединением первой (отрицательной) суммы емкостей А1 и А2 (обозначенной как Σ) с первой (отрицательной) суммой емкостей В1 и В2 (обозначенной как ΣCA1). Вторая считанная величина получается объединением первой (положительной) разности емкостей А1 и А2 (+ΔCA1) со второй (отрицательной) суммой емкостей В1 и В2 (-ΣСВ2). Третья считанная величина получается объединением второй (положительной) суммы емкостей А1 и А2 (+ΣСА2) с первой (положительной) разностью емкостей В1 и В2 (+ΔCB1). Эту последовательность продолжают, как показано на фиг.6.
Следует отметить, что схема мультиплексирования этого типа влияет на динамический диапазон АЦП по сравнению с системой без мультиплексирования. Для схемы с одним датчиком, описанной выше по фиг.2, амплитуды квадратных управляющих напряжений и емкость обратной связи Cf подбирают так, чтобы диапазон АЦП приближался к минимуму +С1+С2 и максимуму - С1-С2. Если используется более чем один канал, предпочтительно, чтобы АЦП не входило в насыщение в случае положительных, отрицательных или суммы сумм результирующих сигналов. При наличии двух каналов эффективный диапазон АЦП упадет до половины полной шкалы. При наличии трех каналов эффективный диапазон АЦП упадет до одной трети полной шкалы, что обычно означает уменьшение полезного диапазона 16-битного АЦП до 14,4 бита. Чтобы восполнить потерю диапазона, скорость дискретизации можно повысить и/или увеличить разрешение АЦП.
Пара квадратурных инверторов 156А и 156В предназначена для разделения отсчетов на поток 158А суммы и поток 160А разности для первого датчика 120 (канала А) и также на поток 158 В суммы и поток 160 В разности для второго датчика 220 (канала В). В этих квадратурных инверторах 156А и 156В предусмотрена функция разделения, также при помощи приема первого, второго, третьего и четвертого прямоугольных управляющих сигналов (или их производных) и их детектирования на основе процесса разделения. Каждый из четырех потоков 158А, 160А, 158В и 160В суммы и разности подают затем на один из соответствующих усредняющих устройств 159A-159D. В усредняющих устройствах 159A-159D каждый из потоков усредняют по периоду или времени цикла Р, причем время цикла Р устанавливают, как описано ниже, таким, чтобы исключить вклад сигналов из канала А в канал В и наоборот.
Фиг.6 включает первое изображение 166А величин, входящих в поток суммы, для канала А, и второе изображение 166В потока суммы для канала В. Для обеспечения непрерывного потока битов данных применяется повторение одного отсчета для несущей более высокой частоты (канала А) и повторение двух последовательных отсчетов для более медленной несущей (канала В). Хотя на фиг.6 показаны только потоки суммы, аналогичным образом формируются и потоки 160А и 160В разностей. Важно еще раз отметить, что в течение одного цикла сумму и разность из второго датчика (т.е. канала В) добавляют к нулям в потоках суммы и разности канала А. Аналогично, в течение одного цикла сумму и разность из первого датчика (т.е. канала А) добавляют к нулям в потоках суммы и разности канала В.
Потоки (усредненной) суммы и разности канала А подают на первый делитель 162А и первый цифровой фильтр 164А, чтобы получить первые цифровые выходные данные. Потоки (усредненной) суммы и разности канала В подают на второй делитель 162В и второй цифровой фильтр 164 В, чтобы получить вторые цифровые выходные данные. Первые и вторые цифровые выходные данные, таким образом, относятся к первому и второму дифференциальным датчикам 120 и 220 соответственно.
Мультиплексирование датчиков, описанным здесь способом, можно использовать, чтобы сэкономить как энергию, так и количество электронных компонентов, требуемых для систем с несколькими датчиками. Например, электрометрический усилитель обычно представляет собой схему, содержащую один или более относительно дорогих и энергоемких комплектующих усилителей. Аналогично, АЦП также является относительно дорогим и энергоемким компонентом. Таким образом, мультиплексирование может использоваться для значительного уменьшения стоимости и упрощения системы с несколькими датчиками.
Хотя в вышеизложенном примере представлено мультиплексирование двух дифференциальных емкостных датчиков с использованием прямоугольных несущих частоты f и 2f, следует отметить, что можно использовать и более высокие порядки мультиплексирования. Например, сигналы от дополнительных (например, третьего, четвертого, пятого и т.д.) дифференциальных емкостных датчиков можно подать на общий вход электрометрического усилителя 140. Для мультиплексирования таким способом предпочтительно, чтобы разные несущие, подаваемые на каждый из дифференциальных емкостных датчиков разных каналов, были ортогональными. Для систем с фазовым детектором ортогональность может быть гарантирована, если частоты являются гармонически сопряженными и ни одна из нечетных гармоник не совпадает. Несколько примеров подходящих ортогональных наборов перечислены ниже, в таблице 1.
В таблице 1 также перечислены предпочтительные скорости дискретизации АЦП для каждого из наборов указанных несущих. Указанная минимальная скорость дискретизации - это первая кратная гарантированной скорости, при которой для каждой из частот каждая половина цикла несущей содержит одинаковое число отсчетов. Например, в последовательности 3f, 4f, 6f, 8f, указанной выше в таблице 1, несущая 3f содержит 16 отсчетов на полуцикл, а несущая 8f содержит 6 отсчетов на полуцикл. Указанный множитель также устанавливает минимальный временной интервал Р для накопления (или суммирования), например, время усреднения для усредняющих устройств 159A-159D, описанных выше. При накоплении или суммировании указанного числа отсчетов, например, перед делением величин суммы и разности обеспечивается обнуление лишних частот.
На фиг.7, в качестве примера, показан набор ортогональных несущих синусоидальной формы. На фиг.7 также показан минимальный период Р детектирования или усреднения, в котором умещается целое число циклов. При применении такого периода Р усреднения гарантируется, что компоненты сигнала из разных частотных несущих могут быть эффективно разделены один от другого при помощи описанного выше фазового детектора.
Хотя выше описано мультиплексирование с частотным разделением, настоящее изобретение может быть применено и для мультиплексирования с временным разделением. В этом случае каждый датчик может управляться последовательностью индивидуальных I-Q импульсов по очереди. Значит по-прежнему можно использовать один электрометрический усилитель и один АЦП без какого бы то ни было уменьшения динамического диапазона или требования к усредняющим фильтрам.
Описанные выше примеры относятся к дифференциальным емкостным датчикам, в которых используются две емкости (например, С1 и С2), которые совместно изменяются в зависимости от значения измеряемой величины (например, перемещения). Однако данное изобретение можно также применить к несимметричным емкостным датчикам. Например, емкостный датчик можно использовать с одной емкостью (например, С1), которая изменяется в зависимости от измеряемого свойства. В таком случае вместо переменной емкости можно применить вторую емкость (например, постоянную емкость С2).
Хотя в вышеизложенных примерах описываются емкостные системы, важно также отметить, что данное изобретение может быть использовано для оцифровки любого импеданса. Специалисты, например, обычно понимают каким образом рассмотренные выше принципы можно применить также (с некоторыми незначительными изменениями для конкретной схемы) к резистивным и индуктивным датчикам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПРИ ПОМОЩИ ДИФФЕРЕНЦИАЛЬНОГО ДАТЧИКА | 2019 |
|
RU2717904C1 |
| Устройство для ввода аналоговой информации | 1985 |
|
SU1277083A1 |
| АППАРАТУРА РАДИОСВЯЗИ С ОРТОГОНАЛЬНЫМ ЧАСТОТНЫМ МУЛЬТИПЛЕКСИРОВАНИЕМ | 2005 |
|
RU2297721C2 |
| ЦИФРОВЫЕ СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ ФАЗЫ ПРИНЯТОЙ РЕАЛИЗАЦИИ ГАРМОНИЧЕСКОГО ИЛИ КВАЗИГАРМОНИЧЕСКОГО СИГНАЛА | 2010 |
|
RU2463701C2 |
| УСТРОЙСТВО НАЧАЛЬНОЙ СИНХРОНИЗАЦИИ В СЕТЯХ С КОДОВРЕМЕННЫМ УПЛОТНЕНИЕМ КАНАЛОВ | 2008 |
|
RU2416168C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СИГНАЛОВ ПЕРЕДАЧИ В ДУПЛЕКСНЫХ СИСТЕМАХ СВЯЗИ | 2001 |
|
RU2233553C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО ПОТЕНЦИАЛА НА КОЖЕ ГОЛОВЫ | 2008 |
|
RU2479252C2 |
| ФАЗОМЕТР | 2015 |
|
RU2582625C1 |
| МОДУЛЬ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАТЕЛЯ | 2005 |
|
RU2290662C1 |
| ПРОЦЕССОР ЦИФРОВОГО РАЗДЕЛЕНИЯ КВАДРАТУР | 2022 |
|
RU2784002C1 |
Заявленное изобретение относится к способу и устройству для оцифровки импеданса, и в частности к оцифровке сопротивления емкости дифференциального емкостного датчика. Техническим результатом выступает повышение точности и сокращение времени измерений. Технический результат достигается благодаря тому, что устройство для оцифровки импеданса, содержащее первый (22, 122) и второй (24, 124) импедансные элементы, также включает в себя генератор (26, 30) управляющего сигнала для подачи первого знакопеременного управляющего сигнала (44) на первый импедансный элемент (22, 122) и второго знакопеременного управляющего сигнала (46) на второй импедансный элемент (24, 124), аналого-цифровой преобразователь - АЦП (42, 142) - принимает результирующий сигнал (41, 52, 141), представляющий собой объединение сигналов, образованных при подаче первого и второго знакопеременных управляющих сигналов (44,46) на первый и второй импедансные элементы, первый знакопеременный управляющий сигнал (44) смещен по фазе относительно второго знакопеременного управляющего сигнала (46) так, что результирующий сигнал (41, 52, 141), который подают и дискретизируют в АЦП (42, 142), последовательно характеризует сумму первого и второго импедансов и разность между первым и вторым импедансами. Устройство также содержит разделитель сигнала (56, 156А, 156В), который принимает считанные величины от АЦП (42, 142) и образует из них канал суммы (58, 158А) и канал разности (60, 160А). 5 н. и 15 з.п. ф-лы, 7 ил., табл.1.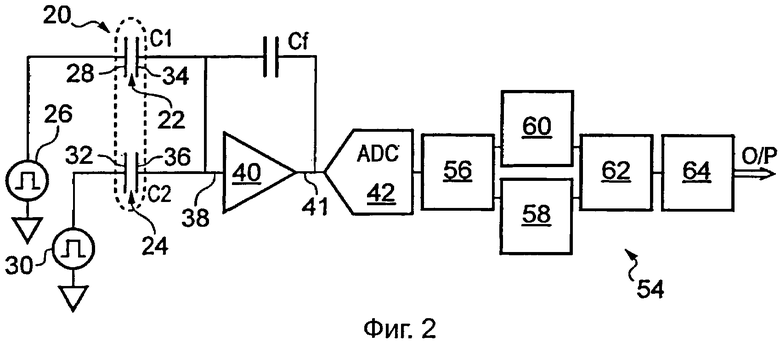
1. Устройство для оцифровки импеданса, содержащее:
первый импедансный элемент с первым импедансом, который изменяется в зависимости от свойства, подлежащего измерению;
второй импедансный элемент со вторым импедансом;
генератор управляющего сигнала для подачи первого знакопеременного управляющего сигнала на первый импедансный элемент и второго знакопеременного управляющего сигнала на второй импедансный элемент; и
аналого-цифровой преобразователь (АЦП) для приема и оцифровки результирующего сигнала, результирующий сигнал представляет объединение сигналов, полученных в результате подачи первого и второго знакопеременных управляющих сигналов на первый и второй импедансные элементы,
при этом первый знакопеременный управляющий сигнал смещен по фазе относительно второго знакопеременного управляющего сигнала так, что результирующий сигнал, принимаемый и дискретизируемый аналого-цифровым преобразователем, последовательно характеризует сумму и разность между первым и вторым импедансами;
отличающееся тем, что устройство содержит разделитель сигнала, который принимает считанные величины с АЦП и образует каналы суммы и разности, канал суммы содержит последовательность величин, характеризующих сумму первого и второго импеданса, а канал разности содержит последовательность величин, характеризующих разность между первым и вторым импедансами.
2. Устройство по п.1, содержащее делитель, при этом делитель делит величины из канала разности на величины из канала суммы, образуя, таким образом, поток выходных величин, характеризующих отношение разности между первым и вторым импедансами к сумме первого и второго импедансов.
3. Устройство по п.1, содержащее по меньшей мере один цифровой фильтр.
4. Устройство по п.1, при этом первый и второй знакопеременные управляющие сигналы являются квадратурными прямоугольными сигналами.
5. Устройство по п.1, содержащее дифференциальный датчик, который включает первый и второй импедансные элементы, при этом оба импедансных элемента - первый и второй - изменяются в зависимости от свойства, подлежащего измерению.
6. Устройство по любому из пп.1-4, содержащее датчик, который включает в себя первый импедансный элемент, при этом второй импеданс второго импедансного элемента не зависит от свойства, измеряемого датчиком.
7. Устройство по п.1, в котором первый и второй импедансные элементы состоят из первого и второго емкостных элементов.
8. Устройство по п.1, содержащее электрометрический усилитель с общим входом для приема сигнала от первого и второго импедансных элементов и образования результирующего сигнала для подачи на аналого-цифровой преобразователь.
9. Устройство по п.1, содержащее датчик перемещения, который включает в себя по меньшей мере первый импедансный элемент, при этом первый импеданс первого импедансного элемента изменяется при перемещении участка датчика перемещения.
10. Устройство по п.1, содержащее третий импедансный элемент с третьим импедансом, который изменяется в зависимости от свойства, подлежащего измерению, и четвертого импедансного элемента с четвертым импедансом, при этом с генератора управляющего сигнала третий знакопеременный управляющий сигнал подают на третий импедансный элемент, а четвертый знакопеременный управляющий сигнал на четвертый импедансный элемент.
11. Устройство по п.10, в котором аналого-цифровой преобразователь принимает результирующий сигнал, состоящий из сигналов, образованных при подаче третьего и четвертого управляющих сигналов на третий и четвертый импедансные элементы.
12. Устройство по любому из пп.10 или 11, в котором первый и второй знакопеременные управляющие сигналы имеют одну частоту, а третий и четвертый знакопеременные управляющие сигналы имеют другую частоту.
13. Прибор для линейных и угловых измерений, который используется совместно с координатомером, прибор содержит устройство для оцифровки импеданса по любому из предшествующих пунктов.
14. Способ оцифровки импеданса, содержащий следующие стадии:
(i) подача первого знакопеременного управляющего сигнала на первый импедансный элемент с первым импедансом, изменяющимся в зависимости от свойства, подлежащего измерению, и подача второго знакопеременного управляющего сигнала на второй импедансный элемент со вторым импедансом, при этом первый знакопеременный управляющий сигнал сдвинут по фазе относительно второго знакопеременного управляющего сигнала;
(ii) генерирование результирующего сигнала путем объединения сигнала, образованного при подаче первого знакопеременного управляющего сигнала на первый импедансный элемент, с сигналом, образованным при подаче второго знакопеременного управляющего сигнала на второй импедансный элемент;
(iii) применение аналого-цифрового преобразователя для превращения результирующего сигнала в последовательность считанных величин;
отличающийся тем, что имеется стадия (iv) образование канала суммы и канала разности из считанных величин, причем канал суммы состоит из последовательности величин, характеризующих сумму первого и второго импеданса, а канал разности состоит из последовательности величин, характеризующих разность между первым и вторым импедансом.
15. Прибор для линейных и угловых измерений, который используется совместно с координатомером, содержащий:
датчик перемещения, содержащий первый импедансный элемент с первым импедансом, изменяющимся в зависимости от свойства, подлежащего измерению,
второй импедансный элемент со вторым импедансом,
генератор управляющего сигнала для подачи первого знакопеременного управляющего сигнала на первый импедансный элемент и второго знакопеременного управляющего сигнала на второй импедансный элемент, и
аналого-цифровой преобразователь (АЦП) для приема и оцифровки результирующего сигнала, образованного объединением сигналов, полученных при подаче первого и второго знакопеременных управляющих сигналов на первый и второй импедансные элементы.
16. Прибор по п.15, в котором датчик перемещения представляет собой дифференциальный датчик, содержащий первый и второй импедансные элементы, где оба импеданса - первый и второй - изменяются в зависимости от перемещения, подлежащего измерению.
17. Прибор по п.15, содержащий третий импедансный элемент с третьим импедансом, который изменяется в зависимости от свойства, подлежащего измерению, и четвертый импедансный элемент с четвертым импедансом, при этом с генератора управляющего сигнала третий знакопеременный управляющий сигнал подается на третий импедансный элемент, а четвертый знакопеременный управляющий сигнал на четвертый импедансный элемент, причем на АЦП подается результирующий сигнал, состоящий из сигналов, образованных при подаче третьего и четвертого управляющих сигналов на третий и четвертый импедансные элементы.
18. Прибор по п.15, в котором первый и второй знакопеременные управляющие сигналы являются квадратурными прямоугольными сигналами.
19. Прибор по п.15, в котором первый и второй импедансные элементы состоят из первого и второго емкостных элементов.
20. Разомкнутая схема для оцифровки выходного сигнала по меньшей мере одного датчика с переменным импедансом, состоящая из задающего устройства для генерации первого и второго знакопеременных управляющих сигналов, первого знакопеременного управляющего сигнала для подачи на первый импедансный элемент соответствующего датчика и второго знакопеременного управляющего сигнала для подачи на второй импедансный элемент, причем схема содержит аналого-цифровой преобразователь с входом для приема результирующего сигнала, образованного объединением сигналов, образованных при подаче первого и второго управляющих сигналов на первый и второй импедансные элементы.
| WO 8909927 A1, 19.10.1989 | |||
| US 20040232923 A1, 25.11.2004 | |||
| Преобразователь перемещения в частоту | 1985 |
|
SU1317283A1 |
| US 0006694270 B2, 17.02.2004 | |||
| US 20110210759 A1, 01.09.2011. | |||

