Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с асинхронными исполнительными двигателями.
Наиболее близким по технической сущности является следящий электропривод Simovert Masterdrives МС, содержащий первый и второй блоки задания, пропорционально-интегральный регулятор скорости, пропорциональный (пропорционально-интегральный) регулятор положения, блок деления, первый и второй регуляторы тока, преобразователь координат, блок дифференцирования, блок интегрирования, сумматор, силовой преобразователь, асинхронный электродвигатель с исполнительным механизмом, датчик тока и датчик положения.
Недостаток наиболее близкого по технической сущности следящего электропривода с асинхронным исполнительным двигателем заключается в его низком быстродействии.
Технический результат достигается тем, что в следящий электропривод, содержащий первый и второй блоки задания, интегральный регулятор, блок деления, первый и второй регуляторы тока, преобразователь координат, блок дифференцирования, блок интегрирования, сумматор, силовой преобразователь, асинхронный электродвигатель с исполнительным механизмом, датчик тока и датчик положения, причем выход первого блока задания соединен с первым входом интегрального регулятора, второй вход которого соединен с выходом датчика положения, выход второго блока задания соединен с первыми входами первого регулятора тока и блока деления, выход которого соединен с первым входом второго регулятора тока, выход первого регулятора тока соединен с первым входом преобразователя координат, второй вход которого соединен с выходом второго регулятора тока, первый выход преобразователя координат соединен с первым входом силового преобразователя, выход которого соединен с асинхронным электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с входом блока дифференцирования, второй выход силового преобразователя соединен с первым входом датчика тока, второй вход которого соединен с выходом блока интегрирования и первым входом сумматора, второй выход преобразователя координат соединен с вторым входом сумматора, выход которого соединен с вторым входом силового преобразователя, первый и второй выходы датчика тока соединены соответственно с вторыми входами первого и второго регуляторов тока, а выход блока дифференцирования соединен с входом блока интегрирования, дополнительно введен пропорционально-дифференциальный регулятор, причем выход интегрального регулятора соединен с первым входом пропорционально-дифференциального регулятора, выход которого соединен с вторым входом блока деления, второй вход пропорционально-дифференциального регулятора соединен с выходом датчика положения.
Существенные отличия находят свое выражение в новой совокупности связей между элементами устройства. Указанная совокупность связей позволяет повысить быстродействие следящего электропривода с асинхронным исполнительным двигателем.
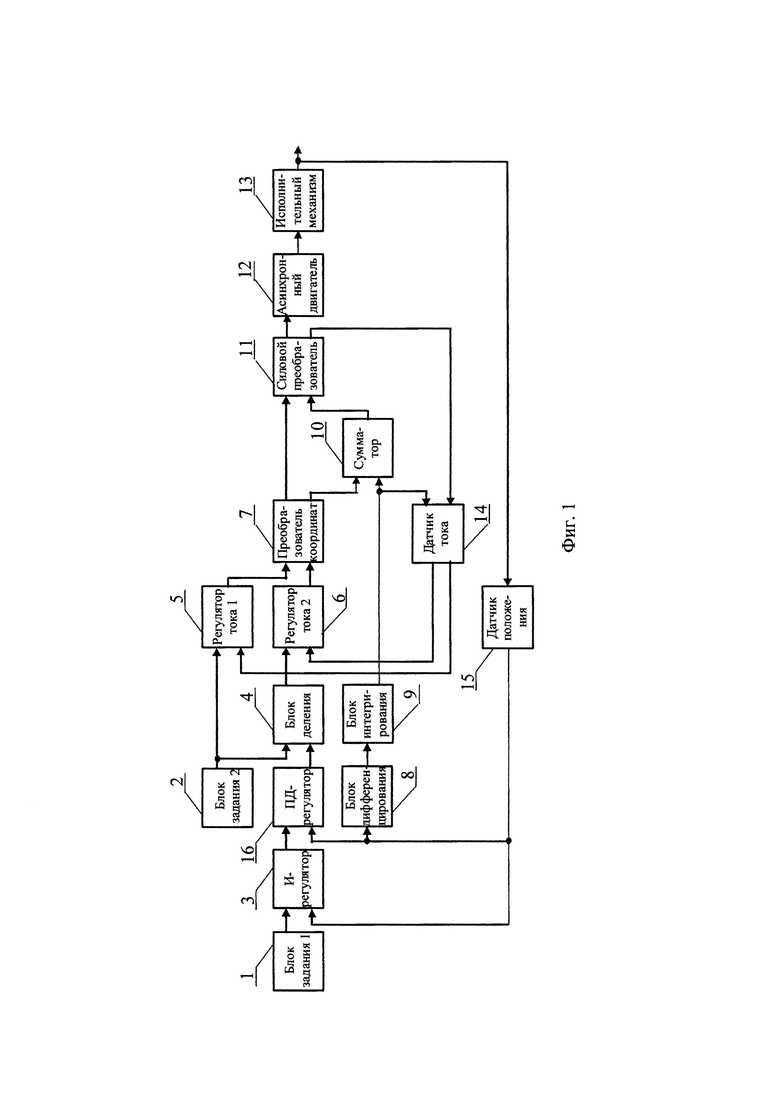
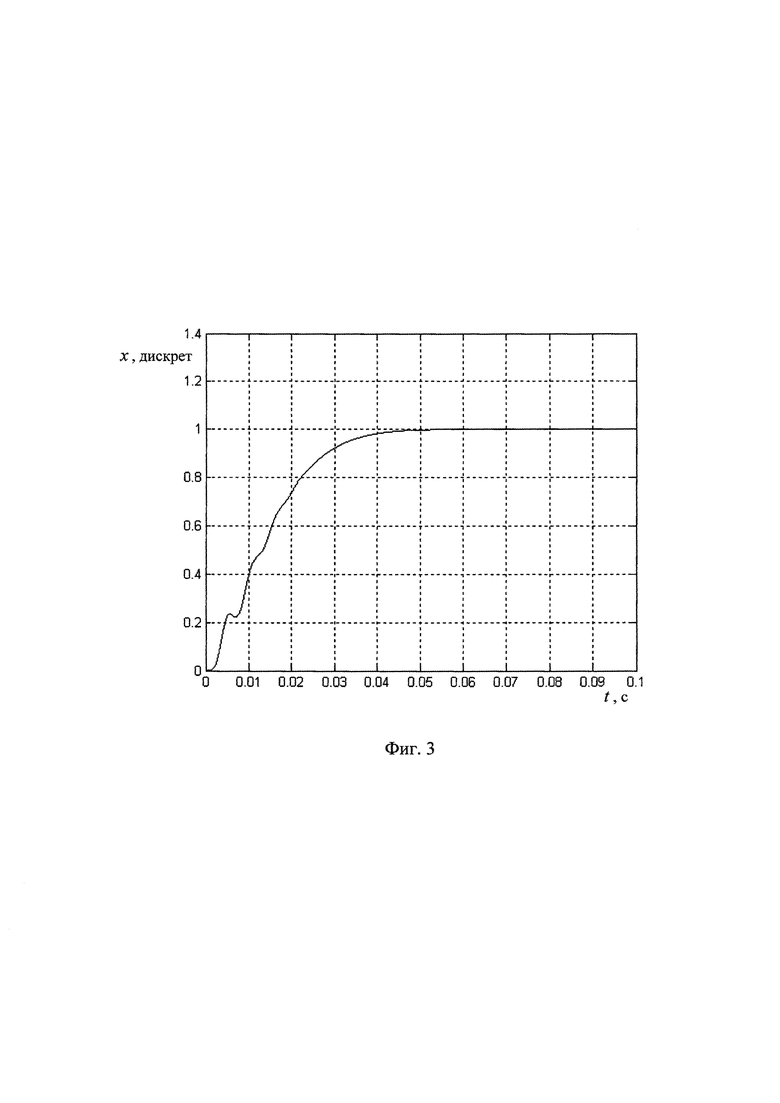
На фиг. 1 приведена функциональная схема следящего электропривода с асинхронным исполнительным двигателем; на фиг. 2 - структурная схема следящего электропривода с асинхронным исполнительным двигателем; на фиг. 3 - переходный процесс по управляющему воздействию в следящем электроприводе.
Следящий электропривод (фиг. 1) содержит блоки 1 и 2 задания, интегральный регулятор 3, блок 4 деления, регуляторы 5 и 6 тока, преобразователь 7 координат, блок 8 дифференцирования, блок 9 интегрирования, сумматор 10, силовой преобразователь 11, асинхронный электродвигатель 12 с исполнительным механизмом 13, датчик 14 тока, датчик 15 положения и пропорционально-дифференциальный регулятор 16.
Выход блока 1 задания соединен с первым входом интегрального регулятора 3, второй вход которого соединен с выходом датчика 15 положения. Выход блока 2 задания соединен с первыми входами регулятора 5 тока и блока 4 деления, выход которого соединен с первым входом регулятора 6 тока. Выход регулятора 5 тока соединен с первым входом преобразователя 7 координат, второй вход которого соединен с выходом регулятора 6 тока. Первый выход преобразователя 7 координат соединен с первым входом силового преобразователя 11, выход которого соединен с асинхронным электродвигателем 12, кинематически связанным с исполнительным механизмом 13, оснащенным датчиком 15 положения. Выход датчика 15 положения соединен с входом блока 8 дифференцирования. Второй выход силового преобразователя 11 соединен с первым входом датчика 14 тока, второй вход которого соединен с выходом блока 9 интегрирования и первым входом сумматора 10. Второй выход преобразователя координат 7 соединен с вторым входом сумматора 10, выход которого соединен с вторым входом силового преобразователя 11. Первый и второй выходы датчика 14 тока соединены соответственно с вторыми входами регуляторов 5 и 6 тока. Выход блока 8 дифференцирования соединен с входом блока 9 интегрирования. Выход интегрального регулятора 3 соединен с первым входом пропорционально-дифференциального регулятора 16, выход которого соединен с вторым входом блока 4 деления. Второй вход пропорционально-дифференциального регулятора 16 соединен с выходом датчика 15 положения.
В качестве асинхронного электродвигателя 12 может быть использован, например, любой электродвигатель серии 1РН7. Исполнительный механизм 13, например, может представлять собой поворотный стол, соединенный с помощью червячного редуктора и муфты с валом электродвигателя 12. В качестве датчика 15 положения, например, может быть использован резольвер, встроенный в электродвигатель серии 1РН7, или любой фотооптический датчик угла поворота, установленный, например, на поворотном столе.
Все остальные блоки и элементы предлагаемого следящего электропривода, в том числе и силовой преобразователь 11, могут быть реализованы, например, на устройстве Simovert Masterdrives МС. В частности, блок 1 задания может быть выполнен, например, с помощью функции Basic positioner. Блок 2 задания, блок 4 деления, регуляторы 5 и 6 тока, преобразователь 7 координат, блок 9 интегрирования и сумматор 10 могут быть реализованы, например, с помощью функций Current controller asynchronous motor и Torque limitation. Датчик 14 тока, например, может быть выполнен на трансформаторах тока, встроенных в силовой преобразователь 11, и функций Actual values и Current controller asynchronous motor. Блок 8 дифференцирования, например, может быть реализован с помощью функции Set speed values. Интегральный регулятор 3, например, может быть реализован с помощью стандартного пропорционально-интегрального регулятора, входящего в состав функции Position control, в котором коэффициент передачи пропорциональной части приравнен нулю. Пропорционально-дифференциальный регулятор 16, например, может быть реализован с помощью вычитателей, сумматора, пропорциональных звеньев и дифференциального звена, входящих в состав свободных функциональных блоков (Free blocks) устройства Simovert Masterdrives МС, и BICO-технологии программирования.
Следящий электропривод работает следующим образом. В соответствии с величиной задающего сигнала, поступающего с выхода блока 1 задания, и сигнала датчика 15 положения интегральный регулятор 3 в совокупности с блоком 8 дифференцирования и пропорционально-дифференциальным регулятором 16 формируют сигнал на входе (входе делимого) блока 4 деления. Одновременно с блока 2 задания на вход регулятора 5 тока и вход (вход делителя) блока 4 деления поступает сигнал, пропорциональный требуемому значению составляющей тока I1dз статора во вращающейся вместе с ротором системе координат. Результат деления с выхода блока 4 является сигналом задания составляющей тока I1qз статора, поступающей на вход регулятора 6 тока. Датчик 14 тока формирует на своих выходах действительные значения проекций вектора тока статора I1d и I1q во вращающейся системе координат, которые получаются посредством измерения фазных токов на втором выходе силового преобразователя 11, трехфазно-двухфазного преобразования и перехода к проекциям через угол поворота ротора, формируемого на выходе блока 9 интегрирования. В свою очередь на вход блока 9 интегрирования подается сигнал, пропорциональный скорости вращения ротора с выхода блока 8 дифференцирования. Регуляторы 5 и 6 тока сравнивают заданные величины проекций вектора тока во вращающейся системе координат с действительными значениями, поступающими с выходов датчика 14 тока, и в соответствии со своими передаточными функциями формируют на своих выходах проекции U1d и U1q на вращающиеся оси вектора напряжения, которое надо подать на статорные обмотки асинхронного электродвигателя 12. Преобразование проекций вектора напряжения в реальное трехфазное напряжение на статорных обмотках осуществляется с помощью преобразователя 7 координат, сумматора 10 и собственно силового преобразователя 11. А именно в преобразователе 7 координат производится вычисление модуля вектора напряжения статора  и угла поворота вектора напряжения относительно оси абсцисс вращающейся системы координат
и угла поворота вектора напряжения относительно оси абсцисс вращающейся системы координат  . В сумматоре 10 происходит сложение угла ϕ1 с углом поворота ротора ϕр ϕ=ϕ1+ϕр. По сигналам U1 и ϕ на первом выходе силового преобразователя формируется система трехфазного напряжения:
. В сумматоре 10 происходит сложение угла ϕ1 с углом поворота ротора ϕр ϕ=ϕ1+ϕр. По сигналам U1 и ϕ на первом выходе силового преобразователя формируется система трехфазного напряжения:
Полученное трехфазное напряжение с первого выхода силового преобразователя 11 заставляет вращаться вал асинхронного электродвигателя 12, который приводит в движение исполнительный механизм 13. Перемещение исполнительного механизма 13 измеряется датчиком 15 положения. Движение продолжается до тех пор, пока величина сигнала с датчика 15 положения не сравняется с величиной задающего сигнала, поступающего с выхода блока 1 задания.
Интегральный регулятор 3 компенсирует действие всех помех, охваченных датчиком 15. Пропорционально-дифференциальный регулятор 16 обеспечивает компенсацию основных инерционностей электродвигателя 12 и исполнительного механизма 13.
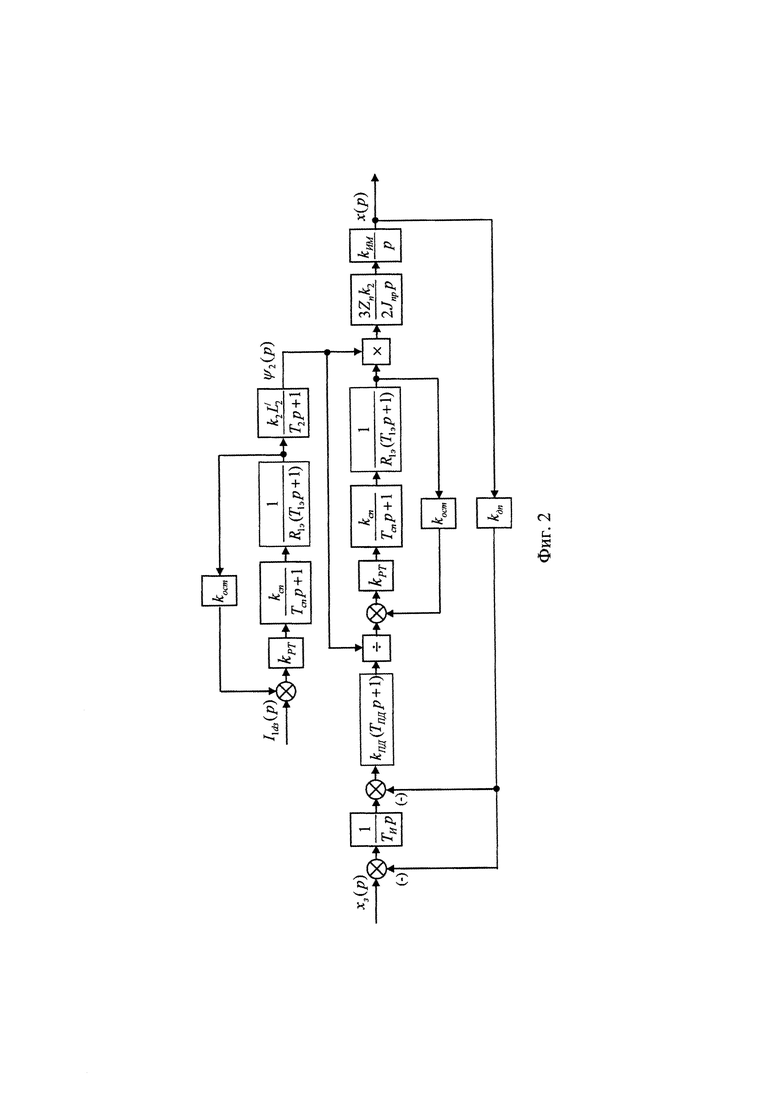
Для подтверждения высокого быстродействия предлагаемого следящего электропривода с асинхронным электродвигателем рассмотрим его структурную схему (фиг. 2). Она содержит две взаимосвязанные системы управления: систему стабилизации составляющей тока I1d (и, следовательно, потока ψ2 ротора) и систему управления перемещением x исполнительным механизмом (в простейшем случае - углом ϕр поворота вала двигателя). В систему управления перемещением входят четыре контура: контур тока и два контура положения.
Система стабилизации составляющей тока I1d содержит только один контур - контур тока.
Контуры тока в обоих системах выполнены идентично и содержат пропорциональные регуляторы тока с коэффициентами передачи kPT, апериодические звенья  , характеризующие динамические свойства силового преобразователя, и передаточные функции статорной цепи асинхронного электродвигателя
, характеризующие динамические свойства силового преобразователя, и передаточные функции статорной цепи асинхронного электродвигателя  . В этих формулах приняты обозначения:
. В этих формулах приняты обозначения:  ;
;  ;
;  ;
;  ;
;  ;
;  ; R1 и L1 - активное сопротивление и индуктивность цепи статора;
; R1 и L1 - активное сопротивление и индуктивность цепи статора;  и
и  - приведенные активное сопротивление и индуктивность цепи ротора; L0 - взаимная индуктивность обмоток; kсп и Тсп - коэффициент передачи и постоянная времени силового преобразователя соответственно.
- приведенные активное сопротивление и индуктивность цепи ротора; L0 - взаимная индуктивность обмоток; kсп и Тсп - коэффициент передачи и постоянная времени силового преобразователя соответственно.
В первый (внутренний) контур положения входят пропорционально-дифференциальный регулятор, делительное звено, замкнутый контур тока, множительное звено, интегральное звено  и передаточная функция исполнительного механизма
и передаточная функция исполнительного механизма  . Здесь приняты обозначения: Zп - число пар полюсов асинхронного электродвигателя; Jпр - приведенный момент инерции вала двигателя; kим - коэффициент передачи исполнительного механизма. Делительное и множительное звенья осуществляют взаимосвязь системы стабилизации тока возбуждения с системой управления перемещением через потокосцепление ψ2 ротора, причем потокосцепление связано с проекцией тока I1d посредством передаточной функции
. Здесь приняты обозначения: Zп - число пар полюсов асинхронного электродвигателя; Jпр - приведенный момент инерции вала двигателя; kим - коэффициент передачи исполнительного механизма. Делительное и множительное звенья осуществляют взаимосвязь системы стабилизации тока возбуждения с системой управления перемещением через потокосцепление ψ2 ротора, причем потокосцепление связано с проекцией тока I1d посредством передаточной функции  .
.
Пропорционально-дифференциальный регулятор представлен передаточной функцией
WПД(р) = kПД(ТПДр + 1),
где kПД - коэффициент передачи, а ТПД - постоянная времени регулятора.
Интегральный регулятор внешнего контура положения представлен передаточной функцией

где ТИ - постоянная времени.
Промоделируем рассматриваемый следящий электропривод в среде «MATLAB SIMULINK» для конкретной технической реализации, когда kдп=1, kим=326 дискрет/рад; kсп=0,0067 В/дискрету; Тсп=0,0016 с; R1э=13,53 Ом; Т1э=0,0157 с; Т2=0,0273 с; Zп=1; Jпр=0,001 кгм2; kост=6826 дискрет/А; ТПД=0,4 с; kПД=8; ТИ=0,015 с. График переходного процесса (фиг. 3) показывает, что время переходного процесса по управлению в предлагаемом следящем электроприводе составляет tпп=0,0392 с, а перерегулирование - σ=0%. Для сравнения надо сказать, что время переходного процесса в устройстве, взятом за прототип, при стандартных настройках регуляторов составляет 2,5 с.
Отсюда следует, что предложенный следящий электропривод с асинхронным исполнительным двигателем более чем в 40 раз превосходит по быстродействию устройство, взятое за прототип.
Таким образом, предлагаемый электропривод позволяет повысить быстродействие следящих систем с асинхронными исполнительными двигателями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2499351C1 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2002 |
|
RU2226739C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2605948C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2489798C1 |
| Следящий привод стабилизации бортовой и килевой качки | 2020 |
|
RU2766552C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
Изобретение относится к области электротехники и может быть использовано в следящих электроприводах с асинхронными исполнительными двигателями. Техническим результатом является повышение быстродействия следящего электропривода с асинхронным исполнительным двигателем. Следящий электропривод содержит первый и второй блоки задания, интегральный регулятор, блок деления, первый и второй регуляторы тока, преобразователь координат, блок дифференцирования, блок интегрирования, сумматор, силовой преобразователь, асинхронный электродвигатель с исполнительным механизмом, датчик тока, датчик положения и пропорционально-дифференциальный регулятор. Предлагаемый электропривод позволяет повысить быстродействие следящих систем с асинхронными исполнительными двигателями. 3 ил.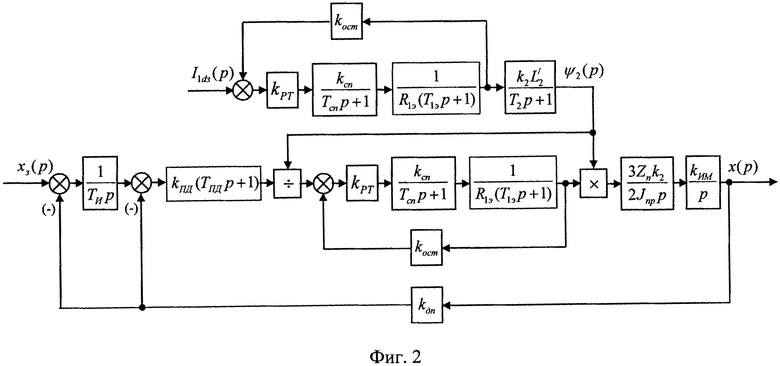
Следящий электропривод, содержащий первый и второй блоки задания, интегральный регулятор, блок деления, первый и второй регуляторы тока, преобразователь координат, блок дифференцирования, блок интегрирования, сумматор, силовой преобразователь, асинхронный электродвигатель с исполнительным механизмом, датчик тока и датчик положения, причем выход первого блока задания соединен с первым входом интегрального регулятора, второй вход которого соединен с выходом датчика положения, выход второго блока задания соединен с первыми входами первого регулятора тока и блока деления, выход которого соединен с первым входом второго регулятора тока, выход первого регулятора тока соединен с первым входом преобразователя координат, второй вход которого соединен с выходом второго регулятора тока, первый выход преобразователя координат соединен с первым входом силового преобразователя, выход которого соединен с асинхронным электродвигателем, кинематически связанным с исполнительным механизмом, оснащенным датчиком положения, выход которого соединен с входом блока дифференцирования, второй выход силового преобразователя соединен с первым входом датчика тока, второй вход которого соединен с выходом блока интегрирования и первым входом сумматора, второй выход преобразователя координат соединен с вторым входом сумматора, выход которого соединен с вторым входом силового преобразователя, первый и второй выходы датчика тока соединены соответственно с вторыми входами первого и второго регуляторов тока, а выход блока дифференцирования соединен с входом блока интегрирования, отличающийся тем, что в него дополнительно введен пропорционально-дифференциальный регулятор, причем выход интегрального регулятора соединен с первым входом пропорционально-дифференциального регулятора, выход которого соединен с вторым входом блока деления, второй вход пропорционально-дифференциального регулятора соединен с выходом датчика положения.
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2006 |
|
RU2358382C2 |
| Способ измерения разности фаз | 1934 |
|
SU42616A1 |
| US 8129936 B2, 06.03.2012 | |||
| DE 102006042038 B3, 07.02.2008. | |||

