Изобретение представляет собой трелевочную установку, применяемую преимущественно в горной местности.
Известны трелевочные установки с радиальными тягово-несущими канатами, включающие приводную лебедку, грузонесущий орган и систему приводных канатов.
Целью изобретения является уменьшение канатоемкости установки и увеличение срока службы канатов.
Для этого грузонесущий орган выполнен в виде подвесной лебедки, снабженной канатоведущим шкивом с приводом от тягово-несущего каната, запасованного на двух барабанах приводной лебедки. С канатоведущим шкивом соединены при помощи трансмиссии три барабана, два из которых снабжены подпружиненными гидроцилиндрами, а третий выполнен с храповым механизмом.
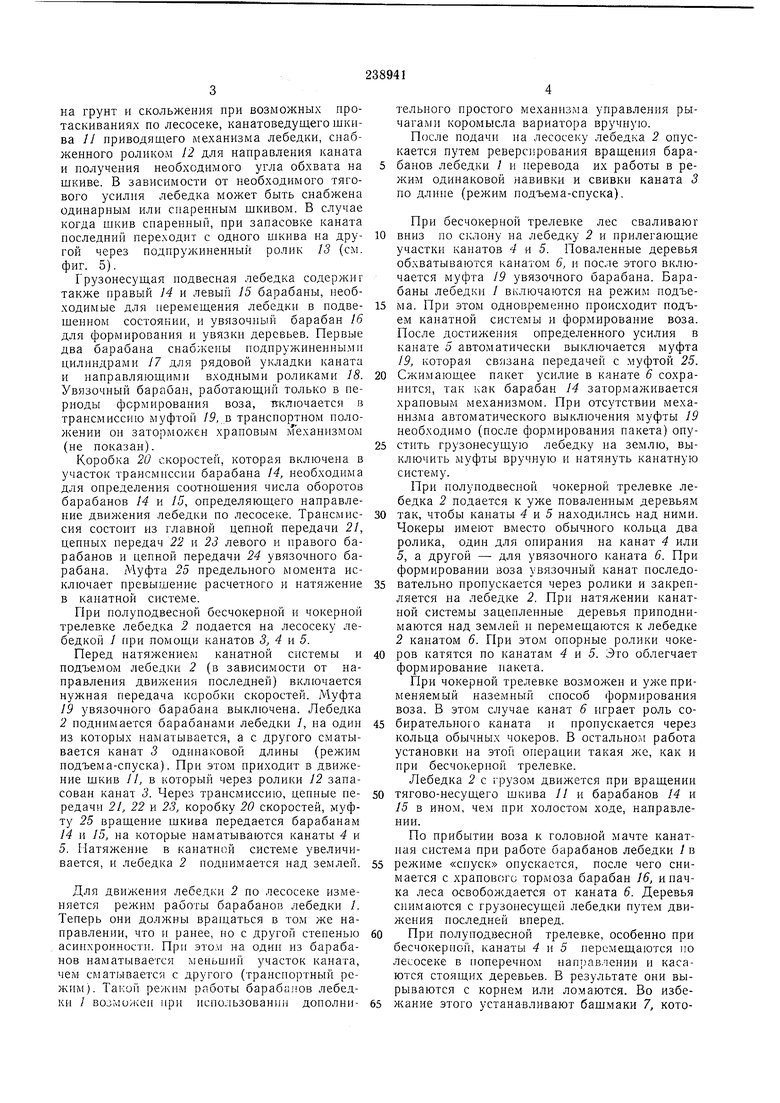
На фиг. 1 приведена схема полуподвесной бесчокерной установки; на фиг. 2 - схема полуподвесной чокерной установки; на фиг. 3 - схема трелевочной установки с аэростатом; на фиг. 4 схематически изображена грузонесущая подвесная лебедка; на фиг. 5 - установка с радиальными тягово-несущими канатами.
шивается на блоках на головной мачте. Тыловыми опорамн (в зависимости от рельефа местности) служат деревья, пни и т. д. Установка содержит приводную двухбарабанную лебедку /, которая необходима для привода канатной системы в целом, грузонесущую подвесную лебедку 2 для транспортировки деревьев. Лебедка 2 имеет механизм для маневрирования по лесосеке, формирования и увязки воза.
Передний тягово-несущий канат 3 служит для подъема, опускания и транспортировки лебедк 2 с возом и без него и привода механизмов этой лебедки. Хвостовые тягово-несущие канаты 4 и 5 применяются для подъема, опускания и транспортировки лебедки 2 порожней и с возом по лесосеке и изменения направления ее движения в пределах треугольника разрабатываемой лесосеки, вершинами
которого являются головная и тыловая опоры. Увязочный канат 6 используется при формировании и увязке воза. Переносные башмаки 7 фиксируют направление канатов 4 и 5. Когда установка работает с аэростатом 8,
последний соединяют с грузонесущей подвесной лебедкой канатом постоянной длины.
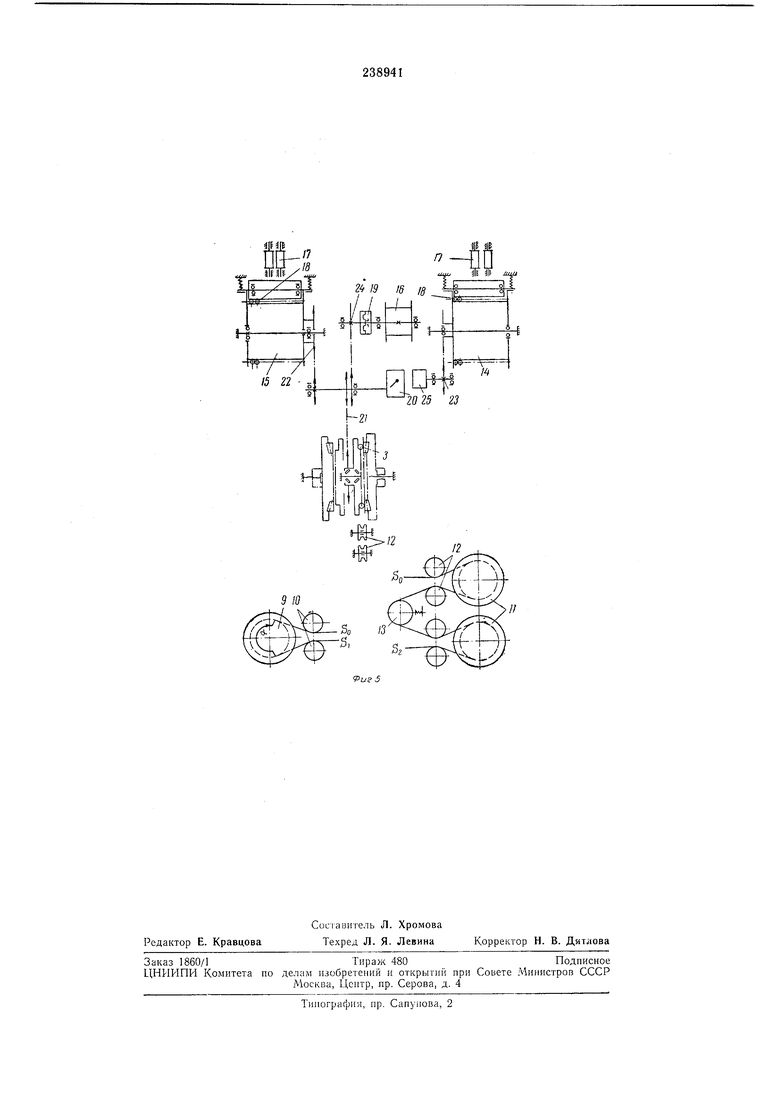
на грунт и скольжения при возможных протаскиваниях по лесосеке, канатоведущего шкива И приводящего механизма лебедки, снабженного роликом 12 для направления каната и получения необходимого угла обхвата на шкиве. В зависимости от необходимого тягового усилия лебедка может быть снабжена одинарным или спаренным шкивом. В случае когда шкив спаренный, при запасовке каната последний переходит с одного шкпва на другой через подпружиненный ролик 13 (см. фиг. 5).
Грузонесушая подвесная лебедка содержит также правый 14 и левый 15 барабаны, необходимые для 1еремеш.ения лебедки в подвешепнем состоянии, и увязочиый барабан 16 для формирования и увязки деревьев. Первые два барабана снабжены подпружиненными цилиндрами 17 для рядовой укладки каната и иаправляюшими входными роликами 18. Увязочиый барабан, работаюш,ий только в периоды формирования воза, Пключается в трансмиссию муфтой /5,, в транспортном положении он заторможен храповым леханизмом (не показан).
Коробка 20 скоростей, которая включена в участок трансмпссии барабана 14, необходима для определения соотношения числа оборотов барабанов 14 и 15, определяющего направление движения лебедки по лесосеке. Трансмпссия состоит из главной цепной нередачи 21, цепных передач 22 и 23 левого н правого барабанов и цепной передачи 24 увязочного барабана. Муфта 25 предельного момента исключает превышение расчетного и натяжение в каиатной системе.
При полуподвесной бесчокерной и чокерной трелевке лебедка 2 подается на лесосеку лебедкой / при помоши канатов 3, 4 и 5.
Перед иатяжением канатной системы и подъемом лебедки 2 (в зависимости от направления движения последней) включается нужная передача коробки скоростей. Муфта 19 увязочного барабана выключена. Лебедка 2 поднимается барабанами лебедки 1, на один из которых наматывается, а с другого сматывается канат 3 одинаковой длины (режим подъема-спуска). При этом приходит в движение шкив У/, в который через ролики 12 запасован канат 3. Через трансмиссию, цепные передачи 21, 22 н 23, коробку 20 скоростей, муфту 25 вращение шкива передается барабанам 14 и 15, на которые наматываются канаты 4 и 5. Натяжение в канатной системе увеличивается, и лебедка 2 поднимается над землей.
Для движения лебедки 2 по лесосеке изменяется режим работы барабанов лебедки /. Теперь они должны врапдаться в том же направлении, что и ранее, но с другой степенью асинхронности. При этом на один из барабанов наматывается меньший участок каната, чем сматывается с другого (транспортный режнм). Такой режим работы барабанов лебедки / возмо 1Сеи при использовании дополнительного простого механизма управления рычагами коромысла вариатора вручную.
После подачи на лесосеку лебедка 2 опускается путем реверс1фования вращения барабанов лебедки / и перевода их работы в режим одинаковой навивки и свивки каната 3 по длине (режим подъема-спуска).
При бесчокериой трелевке лес сваливают вниз по склону на лебедку 2 и прнлегающие участки канатов 4 я 5. Поваленные деревья обхватываются канатом 6, и после этого включается муфта 19 увязочного барабана. Барабаны лебедки 1 включаются на режим подъема. При этом одновременно нроисходит подъем канатной системы и формирование воза. После достижения определенного усилия в канате 5 автоматически выключается муфта 19, которая связана передачей с муфтой 25. Сжимающее пакет усилие в канате 6 сохранится, так как барабан 14 затормаживается храповым механизмом. При отсутствии механизма автоматического выключения муфты 19 необходимо (после формирования пакета) опустить грузонесущую лебедку на землю, выключить муфты вручную и натянуть канатную систему.
При иолуиодвесной чокерной трелевке лебедка 2 подается к уже поваленным деревьям так, чтобы канаты 4 и 5 находились над ними. Чокеры имеют вместо обычного кольца два ролика, один для опирания на канат 4 или 5, а другой - для увязочного каната 6. При формировании воза увязочный канат последовательно пропускается через ролики и закрепляется на лебедке 2. При натяжении канатной системы зацепленные деревья приподнимаются над землей н перемещаются к лебедке 2 канатом 6. При этом опорные ролики чокеров катятся по капатам 4 я 5. Это облегчает формирование иакета.
При чокерной трелевке возможен и уже применяемый наземный сиособ формирования воза. В этом случае канат 6 играет роль собирательного каната н пропускается через кольца обычных чокеров. В остальнога работа установки на этой операции такая же, как и при бесчокерпой трелевке.
Лебедка 2 с грузом движется при вращении тягово-несущего шкива 11 и барабанов 14 и 15 в ином, чем при холостом ходе, направлении.
По прибытии воза к головной мачте канатная система при работе барабанов лебедки 1 в режиме «спуск опускается, после чего снимается с храпового тормоза барабан 16, и пачка леса освобождается от каната 6. Деревья снимаются с грузоиесущей лебедки путем движения носледней вперед.
При полуподвесной трелевке, особенно при бесчокерпой, канаты 4 и 5 перемещаются по лесосеке в топеречиом направлении и касаются стоящих деревьев. В результате они вырываются с корнем или ломаются. Во избежание этого устанавливают бащмаки 7, которые в отдельные моменты трелевки фиксируют положение канатов 4 и 5.
При аэростатной подвесной чокерной трелевке установка работает в основном так же, как и при полуподвесной трелевке. С той лишь разницей, что лебедка 2 опускается для захвата деревьев и затем поднимается. При опускании лебедки канатная система натягивается и канаты 4 V(. 5 наматываются на барабаны 14 и У5, при подъеме канаты сматываются с барабанов. Канат 5 играет роль собирательного и имеет постоянную длину. Барабан 16 отключен от трансмиссии и заторможен храповым механизмом.
Предмет изобретения
Трелевочная установка с радиальными тягово-несущими канатами, включающая приводную лебедку, грузонесущий орган и систему приводных канатов, отличающаяся тем, что, с целью уменьшения канатоемкости установки и увеличения срока службы канатов, грузонесущий орган выполнен в виде подвесной лебедки, снабженной канаторзедущим шкивом с приводом от тягово-несущего каната, запасованного на двух барабанах приводной лебедки, причем с канатоведущим шкивом соединены при помощи трансмиссии три барабана, два из которых снабжены подпружиненными гидроцилиндрами, а третий выполнен с храповым механизмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАНАТНО-ПОДВЕСНАЯ УСТАНОВКА ДЛЯ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1967 |
|
SU205058A1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1971 |
|
SU315634A1 |
| УСТРОЙСТВО ДЛЯ ЛЕБЕДОЧНОЙ (КАНАТНОЙ) ТРЕЛЕВКИ ДРЕВЕСИНЫ | 2004 |
|
RU2246204C1 |
| КАНАТНАЯ ТРЕЛЕВОЧНАЯ УСТАНОВКА | 1990 |
|
RU2009919C1 |
| КАНАТНАЯ УСТАНОВКА ДЛЯ ПОЛУПОДВЕСНОЙ БЕСЧОКЕРНОЙ | 1968 |
|
SU211561A1 |
| СПОСОБ КАНАТНОЙ ТРЕЛЕВКИ ДРЕВЕСИНЫ | 2011 |
|
RU2492630C2 |
| Способ лебедочной трелевки и устройство для ее осуществления | 2016 |
|
RU2633792C1 |
| ОДНОПРОЛЕТНАЯ ПОДВЕСНАЯ КАНАТНАЯ ДОРОГ* | 1973 |
|
SU377291A1 |
| СПОСОБ ЛЕСОЗАГОТОВОК ПРИ КАНАТНОЙ ТРЕЛЕВКЕ ДРЕВЕСНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2178967C1 |
| КАНАТНО-ПОДВЕСНАЯ УСТАНОВКА ДЛЯ ПОЛУПОДВЕСНОЙ ТРЕЛЕВКИ ДЕРЕВЬЕВ | 1967 |
|
SU195486A1 |