Изобретение относится к медицинской технике, а именно к устройствам для исследования вестибулярной системы и ее роли в развитии болезни движения и нарушении ориентации в условиях измененной динамической и визуальной среды. Устройство может быть использовано для улучшения визуального управления движением на орбите, а также в системах виртуальной реальности для тренировок кандидатов в космонавты.
Система персональной навигации человека, включающая зрительный, вестибулярный, слуховой анализаторы, а также тактильные механорецепторы и проприоцепторы, позволяет человеку сохранять в условиях земной силы тяжести точность зрительного восприятия, вертикальную позу и ориентацию в пространстве. В условиях измененного гравитационного поля (в движущихся системах - воздушных, морских и космических кораблях) взаимодействие анализаторов системы персональной навигации может изменяться и приводить к нарушению ряда функций.
Условия космического полета приводят к изменению вестибулярной функции. В невесомости отсутствуют реакции компенсаторного противовращения глаз, рефлексы положения и установки тела, в течение длительного времени подавляется афферентация с отолитового аппарата, повышается реактивность полукружных каналов, меняется взаимодействие вестибулярного аппарата с глазодвигательным (Gualterotti Т. et al, 1970 [12]; Dai М. et al., 1994 [13]; Kornilova L.N. et al., 1983 [14], 1987 [15], 1997 [16]; Козловская И.Б. и соавт., 1981 [17], 1986 [18], 1994 [19]; Kozlovskaya I.B. et al., 1985 [20, 21, 22], Корнилова Л.Н. и соавт., 1982 [23], 2002 [24]). В частности, одним из главных препятствий для реализации высокоточного визуального управления движением в условиях микрогравитации на орбитальных станциях («Мир», МКС и др.) является наличие запаздывания при установке взора в два и более раз по сравнению с земными условиями (Корнилова Л.Н. и соавт., 2002 [24]; Томиловская Е.С., Козловская И.Б., 2010 [19]; Tomilovskaya E.S. et al., 2011 [18]).
Известны многочисленные попытки коррекции вестибуло-сенсорных, вестибуло-глазодвигательных и вестибуло-постуральных нарушений с помощью вестибулярной гальванической и стохастической электрической стимуляции (Halvacka F. et al., 1985 [10]; Fitzpatrick R. et al., 1999 [4], 2004 [5]; Baiter S. et al., 2004 [9]; Bent L. et al., 2000 [3]; Scinicariello A. et al., 2002 [6]; Collins J. et al., 2003 [11]; McDougall H.G. et al, 2006 [9]; Moore S.T. et al., 2006 [8]; Maeda T. et al., 2005 [1], 2007; Садовничий B.A., Александров B.B., 2010 [27], 2011 [28])
Прототипом технического устройства, которое можно было бы использовать для коррекции данного феномена, является устройство гальванической вестибулярной стимуляции (Galvanic Vestibular Stimulation GVS, разработанное группой японских исследователей корпорации Nippon Telegraph and Telephone в рамках программы "Shaking the World: Galvanic Vestibular Stimulation as A Novel Sensation Interface", http://www.siggraph.org/s2005/main.php?f=conference&p=:etech&s=etech24) [1], [7], представленное на 32-й Международной конференции по компьютерной графике и интерактивным технологиям SIGGRAPH в 2005 году в Лос-Анджелесе. Устройство представляет собой наушники, снабженные электродами, которые прилегают к сосцевидным отросткам заушной области правой и левой стороны. К одному из электродов присоединен анод, к противоположному - катод. С блока управления на электроды подаются микротоки (мА), которые через кости черепа стимулируют рецепторы вестибулярного аппарата. В зависимости от направления тока, задаваемого джойстиком, человек ощущает движение в ту или иную сторону и для сохранения равновесия совершает движение тела в противоположную сторону.
Данное устройство предназначено для создания у человека ощущения воздействия сил инерции переносного движения и не предусматривает возможности устранения физиологических последствий реальных внешних воздействий (нарушения равновесия, болезни движения и др.). Тем более данное устройство не предусматривает перманентную корректировку сигналов вестибулярной системы.
Задачей настоящего изобретения является создание устройства, которое обеспечило бы ответ вестибулярной системы на движения головой в условиях разного рода движущихся систем, в частности, в условиях микрогравитации на орбитальной станции, соответствующий ответу при естественных поворотах головы в земных условиях при визуальном управлении движением.
Технический результат изобретения направлен на минимизацию запаздывания взора человека в условиях микрогравитации - автоматическую коррекцию стабилизации взора по показаниям микросенсоров при визуальном управлении космическим объектом.
Указанный результат достигается тем, что устройство автоматической коррекции установки взора человека при визуальном управлении движением в условиях микрогравитации содержит автономный блок питания, блок обработки и формирования сигналов управления, снабженный устройством сопряжения с компьютером и связанный электродным блоком с датчиками ориентации. Электродный блок состоит из двух групп электродов, каждая из которых размещена на одном из наушников шлема с возможностью плотного контакта с кожей головы человека в районе сосочковых бугорков за ушами. Датчики ориентации включают микроакселерометр в лобной части шлема и датчик угловой скорости на верхней части шлема. Блок обработки и формирования сигналов управления расположен на задней части шлема, снабжен переключателем режимов, связан двумя параллельными линиями связи с двумя блоками электродов и выполнен с возможностью формирования корректирующих сигналов на электроды в виде бифазных импульсов двух режимов - в режиме информационной имитации силы тяжести и в режиме сигналов, соответствующих поворотам головы при реализации вестибуло-окулярного рефлекса.
Результат также достигается тем, что блок обработки и формирования сигналов управления в режиме информационной имитации силы тяжести формирует бифазные импульсы предварительно установленной частоты, а в режиме, соответствующем угловым скоростям и ускорениям поворотов головы, - формирует бифазные импульсы переменной частоты, при этом частота импульсов определяется в соответствии с сигналом с датчика угловой скорости и/или в соответствии с сигналом с микроакселерометра.
Также результат достигается тем, что блок обработки и формирования сигналов управления выполнен в виде микроконтроллера, а устройство сопряжения с компьютером выполнено беспроводным.
Кроме того, датчиком угловой скорости является микровиброгироскоп, а датчиком кажущегося ускорения - акселерометр. Информация об ускорении углового рассогласования позволяет уменьшить запаздывание процесса стабилизации [29].
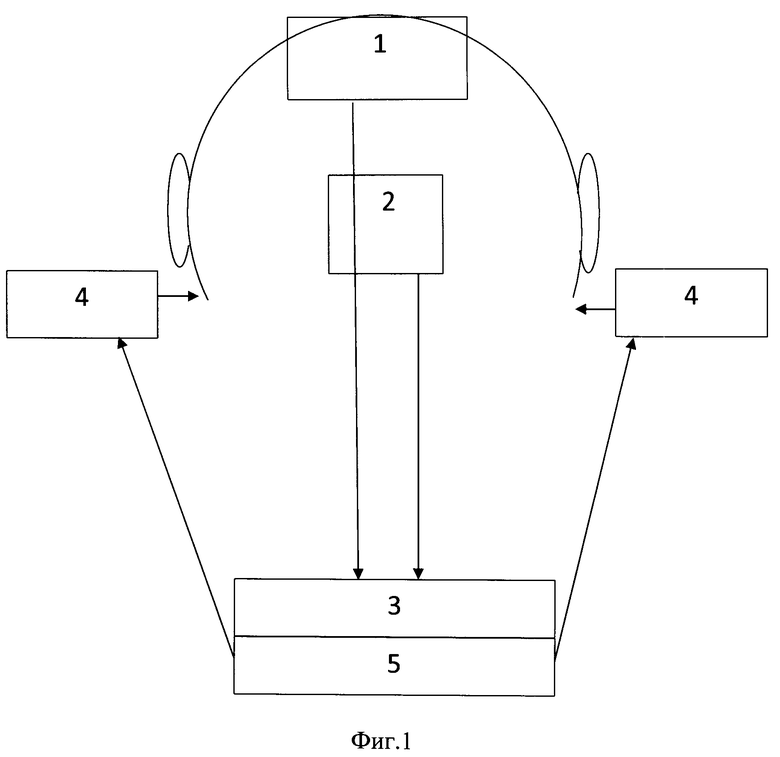
На фиг.1 представлена блок-схема устройства.
Устройство автоматической коррекции установки взора человека при визуальном управлении движением в условиях микрогравитации представляет собой шлем, на котором размещены автономный блок питания 5 (фиг.1) (аккумуляторная батарея), блок обработки и формирования сигналов управления 3 на задней части шлема, снабженный беспроводным устройством сопряжения с компьютером (на рисунке не показано) и связанный с МЭМС датчиками 1, 2 и электродным блоком 4. Устройство сопряжения позволяет передавать на компьютер информацию о работе устройства и изменять алгоритм обработки данных в микроконтроллере.
Электродный блок состоит из двух групп электродов 4, каждая из которых размещена на одном из наушников шлема с возможностью плотного контакта с кожей головы человека в районе сосочковых бугорков за ушами.
Датчики ориентации состоят из микроакселерометра 1 в лобной части шлема и датчика угловой скорости (ДУС) 2 на верхней части шлема, причем ДУС представляет собой микровиброгироскоп. Все датчики выполнены в виде МЭМС-элементов (элементов микроэлектромеханической системы).
Блок обработки и формирования сигналов управления 3 расположен на задней части шлема, снабжен переключателем режимов, представляет собой микроконтроллер и связан двумя параллельными линиями связи с блоком электродов 4. Блок 3 формирует корректирующие сигналы на электроды 4 в виде бифазных импульсов двух режимов - в режиме информационной имитации силы тяжести и в режиме сигналов, соответствующих поворотам головы при реализации вестибуло-окулярного рефлекса. Частота импульсов при втором режиме определяется в соответствии с сигналом с ДУС при медленных (низкочастотных) поворотах головы относительно заранее установленного уровня и в соответствии с сигналом с микроакселерометра при быстрых (высокочастотных) поворотах головы относительно заранее установленного уровня. Выходной сигнал формируется как линейная комбинация этих сигналов на фоне «окрашенного» белого шума. В случае использования устройства в экстремальных условиях визуального управления движением на Земле режим информационной имитации силы тяжести не используется.
Работа устройства заключается в подаче сигналов с помощью гальванического тока на область наружных проекций вестибулярного аппарата (в районе сосочковых бугорков за ушами) для имитации реакции вестибулярной системы, соответствующей реакции системы в естественных земных условиях. Чувствительные элементы устройства (МЭМС датчики ориентации) измеряют значения углового ускорения и угловой скорости. Эти значения передаются в микроконтроллер, который в соответствии с математической моделью вестибулярной функции, реализованной в виде ее двухканального выполнения, вычисляет текущие параметры бифазного сигнала (абсолютная величина, длительность фаз, частота и т.д.), который должна формировать электрическая схема, входящая в состав устройства и который подается на первичные нейроны вестибулярного нерва через электроды. При этом осуществляется комбинация детерминированного сигнала с «окрашенным» белым шумом.
Устройство является компактным и легким и реализует возможность решения задачи определения корректирующих сигналов в ускоренном режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |
| Способ и устройство контроля положения головы пациента и его коррекции путем неинвазивной нейростимуляции | 2022 |
|
RU2822711C2 |
| КОМПЬЮТЕРНЫЙ СПОСОБ ПРОФИЛАКТИКИ И КОРРЕКЦИИ НЕБЛАГОПРИЯТНЫХ ПЕРЦЕПТИВНЫХ И СЕНСОМОТОРНЫХ РЕАКЦИЙ | 2005 |
|
RU2301622C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ С ЦЕРЕБРАЛЬНЫМ ИНСУЛЬТОМ | 2012 |
|
RU2489129C1 |
| Устройство определения координат линии взора наблюдателя в режиме реального времени | 2020 |
|
RU2738070C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВЕСТИБУЛЯРНОГО АНАЛИЗАТОРА В УСЛОВИЯХ МОДЕЛИРУЕМОЙ НЕВЕСОМОСТИ | 1997 |
|
RU2114772C1 |
| МОБИЛЬНЫЙ ИМИТАТОР ВЕРТИКАЛЬНОЙ ПОЗЫ ДЛЯ РАЗРАБОТКИ И ТЕСТИРОВАНИЯ ВЕСТИБУЛЯРНЫХ ПРОТЕЗОВ | 2008 |
|
RU2379007C1 |
| СПОСОБ ДИАГНОСТИКИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2146494C1 |
| Устройство для демонстрации изображений в определенном диапазоне пространства, отстоящем от линии взора наблюдателя на заданный угол, и фиксации реакции на это изображение | 2020 |
|
RU2739519C1 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
Изобретение относится к медицинской технике. Устройство содержит автономный блок питания, блок обработки и формирования сигналов управления, снабженный устройством сопряжения с компьютером и связанный с датчиками ориентации и электродным блоком. Электродный блок состоит из двух групп электродов, каждая из которых включает по меньшей мере один электрод и размещена на одном из наушников шлема с возможностью плотного контакта с кожей головы человека в районе сосочковых бугорков за ушами. Датчики ориентации включают микроакселерометр в лобной части шлема и датчик угловой скорости на верхней части шлема. Блок обработки и формирования сигналов управления расположен на задней части шлема, снабжен переключателем режимов, связан двумя параллельными линиями связи с блоком электродов и выполнен с возможностью формирования корректирующих сигналов на электроды в виде бифазных импульсов двух режимов - в режиме информационной имитации силы тяжести и в режиме сигналов, соответствующих угловому движению головы при реализации вестибуло-окулярного рефлекса. Использование изобретения позволяет минимизировать запаздывание взора человека в условиях микрогравитации и экстремальных условиях визуального управления движением на Земле, т.е. автоматическая коррекция стабилизации взора. 6 з.п. ф-лы, 1 ил.
1. Устройство автоматической коррекции установки взора человека при визуальном управлении движением в условиях микрогравитации, содержащее автономный блок питания, блок обработки и формирования сигналов управления, снабженный устройством сопряжения с компьютером и связанный с датчиками ориентации и электродным блоком, отличающееся тем, что электродный блок состоит из двух групп электродов, каждая из которых включает по меньшей мере один электрод и размещена на одном из наушников шлема с возможностью плотного контакта с кожей головы человека в районе сосочковых бугорков за ушами, датчики ориентации включают микроакселерометр в лобной части шлема и датчик угловой скорости на верхней части шлема, блок обработки и формирования сигналов управления расположен на задней части шлема, снабжен переключателем режимов, связан двумя параллельными линиями связи с блоком электродов и выполнен с возможностью формирования корректирующих сигналов на электроды в виде бифазных импульсов двух режимов - в режиме информационной имитации силы тяжести и в режиме сигналов, соответствующих угловому движению головы при реализации вестибуло-окулярного рефлекса.
2. Устройство по п.1, отличающееся тем, что блок обработки и формирования сигналов управления в режиме информационной имитации силы тяжести выполнен с возможностью предварительной установки частоты.
3. Устройство по п.1, отличающееся тем, что блок обработки и формирования сигналов управления в режиме сигналов, соответствующих угловому движению головы, формирует бифазные импульсы переменной частоты, при этом частота импульсов определяется в соответствии с сигналом с датчика угловой скорости и/или в соответствии с сигналом с микроакселерометра.
4. Устройство по любому из пп.1-3, отличающееся тем, что блок обработки и формирования сигналов управления выполнен в виде микроконтроллера.
5. Устройство по п.1, отличающееся тем, что устройство сопряжения с компьютером выполнено беспроводным.
6. Устройство по п.1, отличающееся тем, что датчиком угловой скорости является микровиброгироскоп, а датчиком углового ускорения - микроакселерометр.
7. Устройство по п.1, отличающееся тем, что датчики ориентации выполнены в виде МЭМС-элементов.
| Galvanic Vestibular Stimulation GVS, Nippon Telegraph and Telephone, 32-я Международная конференции по компьютерной графике и интерактивным технологиям SIGGRAPH, 2005, Лос-Анджелес, http://www.siggraph.org/s2005/main.php?r=conference&p=etech&s=etech24 | |||
| ПРИБОР ДЛЯ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ЛЮДЕЙ, ЛИШЕННЫХ ЗРЕНИЯ | 2006 |
|
RU2305525C1 |
| US 2010308999 A1, 09.12.2010 | |||
| US 2009312817 A1, 17.12.2009. | |||

