Изобретение относится к области робототехники.
Назначение изобретения - улучшение подвижности головного шлема и бедренных суставов в экзоскелете, применяемом для дистанционного управления в копирующем режиме антропоморфным шагающим роботом (антропоморфным роботом-аватаром).
У изобретения имеются прототипы: патент на изобретение №2134193 ш (дата публ. 10.08.1999 г.), заявка на изобретение №2019100888 (дата публ. 06.07.2020, также материалы этой заявки в полном объеме были опубликованы автором заявки в сети Интернет в феврале 2019 года - сайт:  ). Кроме того, к прототипам данного изобретения относятся материалы заявки на изобретение №2019114420 - опубл. автором после регистрации в Роспатенте на сайте:
). Кроме того, к прототипам данного изобретения относятся материалы заявки на изобретение №2019114420 - опубл. автором после регистрации в Роспатенте на сайте:  в июне 2019 года. Также к числу прототипов относится и заявка на полезную модель №2020110199 - опубл. в полном объеме на сайте
в июне 2019 года. Также к числу прототипов относится и заявка на полезную модель №2020110199 - опубл. в полном объеме на сайте  в апреле 2020 года.
в апреле 2020 года.
В заявке №2019100888 рассматривается способ принудительной ориентации тазового сегментом (трусов) экзоскелета, применяемого для управления в копирующем режиме антропоморфным роботом-аватаром. Однако способ принудительной ориентации таза человека-оператора (трусов экзоскелета), описанный в заявке №2019100888, имеет недостаток - наличие в экзоскелете жестких трусов, что ограничивает подвижность (угловую амплитуду) бедренных суставов при осуществлении махов ногами вперед.
На фиг. №1 демонстрируется изображение, взятое из Интернета, где показано, что у человека угловая амплитуда движения в бедренном суставе при махе ногой веред может достигать 130°. (Также в Интернете изредка встречаются значения угловых амплитуд до 145°). Но каково бы не было точное значение угловой амплитуды, важно учитывать, что оно достигается, в том числе и за счет того, что нижняя часть живота человека эластичная. При махе ногой вперед нога человека (бедро ноги) немного вдавливается в нижнюю часть живота.
Если же в экзоскелете для управления антропоморфным роботом-аватаром использовать жесткие трусы, как это описано в заявке на изобретение №2019100888, то нам не удастся осуществить вдавливания ноги в мягкий живот - стенки жестких трусов не дадут это сделать. Соответственно не удастся получить большой угловой амплитуды движения в бедренном суставе при махе ногой вперед.
Между тем, большая угловая амплитуда движения в бедренном суставе может быть полезна, например, для участия антропоморфных роботов-аватаров в военном параде - у военных принято при ходьбе парадным строевым шагом высоко задирать ноги вверх - см. фиг. №2.
Также большая угловая амплитуда движений в бедренном суставе может быть полезна при движении антропоморфного робота-аватара по стремянке - смотрите фиг. №3, где антропоморфный робот-аватар (робот-водолаз) передвигается по стремянке (вид со спины), и если при этом расстояния между ступеньками стремянки большие, то роботу потребуются большие угловые амплитуды движения бедренных суставов.
В заявке на изобретение №2019100888 на странице №18 указана возможность изготовления трусов экзоскелета частично из эластичной ткани, но подробно этот вопрос не анализировался. В данной же заявке на изобретение рассматривается конструкция трусов управляющего экзоскелета частично выполненная из эластичного вещества (полужесткие трусы). Для управления в копирующем режиме антропоморфным шагающим роботом используют механизм подвеса гироскопического типа - систему из шести (в упрощенном варианте - четырех) вложенных друг в друга колец, способных принудительно вращаться относительно друг друга на осях, расположенных вдоль диаметров колец. Оси каждого кольца перпендикулярны осям предыдущего кольца - см. фиг. №4, где для удобства анализа изображения кольца 1-6 механизма подвеса расположены в одной плоскости. Номером 7 обозначена т.н. «вертикальная дуга», с помощью которой поворачивают трусы (штаны) экзоскелета №8 относительно грудного отдела экзоскелета вокруг вертикальной оси грудного отдела экзоскелета №10, номером 9 обозначен шлем. На фиг. №5 - аксонометрическое представление фиг. №4. Фиг. №4 и №5 дают представление об общем взаимном положении колец механизма подвеса (о вложенности колец друг в друга), вертикальной дуги и экзоскелета, предназначенного для управления антропоморфным роботом. В действительности механизм подвеса в рабочем режиме никогда не будет выглядеть так, как показано на фиг. №4 и №5 - кольца никогда не будут находиться в одной плоскости. Более реалистичное (но, менее наглядное) изображение механизма подвеса в рабочем режиме дано на фиг. №6 - кольца 1-6 механизма подвеса расположены в разных плоскостях. В данной заявке на изображениях экзоскелета брючины штанов экзоскелета изображаются отдельно от трусов, см. фиг. №7 и др., где цифрой 8 отмечены трусы, цифрой 9 - шлем, цифрой 10 грудной отдел (жесткий жилет) экзоскелета.
Надо иметь в виду, что в реальной конструкции системы управления антропоморфным роботом трусы и брючины экзоскелета будут представлять единую систему, состоящую из набора взаимно подвижных жестких деталей. Но в силу того, что в данной заявке основное внимание концентрируется на трусах экзоскелета, они изображены отдельно от брючин, а устройство сопряжения трусов и брючин в данной заявке на изобретение не рассматривается (это делается в заявке на изобретение №2019114420). Просто надо подразумевать, что штаны экзоскелета (трусы и брючины) - единая динамически связанная система.
На фиг. №8 приведен вид слева на механизм подвеса без колец 1-6, т.е. показаны только основные внутренние части механизма подвеса: вертикальная дуга №7, задающая в механизме подвеса поворот трусов (штанов) экзоскелета относительно вертикальной оси G - G' грудного отдела экзоскелета №10, верхний манипулятор О-A-B-F, задающий ориентацию шлема №9 относительно грудного отдела экзоскелета, нижний манипулятор Q-O'-A'-B'-F', с узлами-суставами O'-A'-B'-F', задающий наклоны штанов экзоскелета относительно грудного отдела.
Кроме того, в данной заявке вносятся изменения в математическую теорию манипуляторов - головного манипулятора, задающего наклоны головы человека-оператора относительно грудного отдела, аналогичные изменения необходимо внести и для нижнего манипулятора, задающего ориентацию наклоны (ориентацию) таза человека-оператора относительно грудного отдела.
Заявленный способ отличается тем, что управляющие трусы экзоскелета изготавливают из материалов разной эластичности - задняя часть трусов экзоскелета состоит из жесткого вещества (например, из металла, твердой пластмассы и т.п.), передняя часть трусов экзоскелета состоит из эластичного материала, способного упруго деформироваться (например, из ткани - ситец, лен, брезент, синтетические волокна, кожа, …). Благодаря тому, что передняя часть трусов экзоскелета эластичная, ноги человека-оператора смогут немного вдавливаться в живот человека-оператора при осуществлении сильного маха ногой вперед или при приседании на корточки - см. фиг. №9. Конструкция трусов экзоскелета демонстрируется фиг.: №10 - вид трусов спереди, фиг. №11 - вид слева. Фиг. №12 показывает аксонометрический вид - эластичная ткань заштрихована клетчатой штриховкой, жесткая часть трусов (металл, пластмасса, композит) - заштрихована наклонными линиями. Номером 11 обозначен жесткий элемент - «петля», прикрепленный к задней жесткой половине трусов, посредством этой петли трусы подвижно подвешивают на нижнем манипуляторе механизма подвеса. Внутри трусов располагают герметичный раздувающийся пневматический элемент, изготовленный из эластичного материала, на фиг. №12 он отмечен точечной штриховкой. Назначение этого раздувающегося пневматического элемента фиксировать трусы экзоскелета на теле человека-оператора. После того, как человек-оператор, управляющий роботом, наденет на себя трусы экзоскелета, в пневматический эластичный элемент подают газ, под действием которого пневматический элемент раздувается и фиксирует трусы на теле человека-оператора (Работа таких пневматических эластичных фиксаторов и волокнистых элементов, позволяющих регулировать теплообмен и потоотделение, была подробно описана в заявке на изобретение №2019100888 - поэтому в дальнейшем в данной заявке работа пневматических раздувающихся элементов в трусах рассматриваться больше не будет. Следует только отметить, что конструкция пневматических эластичных фиксирующих элементов в трусах должна быть таковой, что не допускает сдавливания половых органов человека-оператора).
На фиг. №13 дано аксонометрическое изображение трусов сзади (пневматический эластичный фиксатор на данной и последующих фиг. не показан). Символами U-U' обозначена геометрическая ось, проходящая через петлю №И. Номером 12 на задней поверхности трусов отмечен жесткий элемент, который используют для закрепления эластичной прокладки, предназначенной для организации работы датчика силовых воздействий, оказываемых человеком на внутреннюю поверхность трусов экзоскелета.
В силу того, что конструкция трусов экзоскелета претерпела изменения по сравнению с конструкцией жестких трусов экзоскелета, описанной в заявке №2019100888 придется изменить расположение датчиков, ответственных за определение направлений и величин силовых воздействий, оказываемых человеком изнутри на трусы экзоскелета. Датчики размещают снаружи трусов (новая конструкция полужестких трусов экзоскелета такова, что теперь внутри трусов для размещения датчиков просто нет места).
Общий принцип работы датчиков силовых воздействий, оказываемых человеком-оператором на внутреннюю поверхность трусов экзоскелета, заключается в том, что под действием усилий человека трусы, в частности задняя жесткая часть трусов, стремятся изменить свое положение в пространстве относительно грудного отдела экзоскелета. При этом трусы экзоскелета на нижнем манипуляторе механизма подвеса прикреплены не абсолютно жестко, а с использованием промежуточной детали, позволяющей трусам совершать небольшие повороты относительно нижнего манипулятора. Между трусами, промежуточной деталью и манипулятором находятся эластичные прокладки, которые упруго деформируются под воздействием силовых воздействий, оказываемых человеком изнутри на трусы. Датчики поворотов, измеряющие изменения углов на осях промежуточной детали (это могут быть цифровые абсолютные угловые энкодеры с кодом Грея) позволяют определить направление и, с учетом упругих деформаций прокладок, величину оказываемых человеком силовых воздействий на внутреннюю поверхность трусов экзоскелета.
На фиг. №14 и №15 показаны типичные «наклоны вперед-назад» торса (грудного отдела) человека относительно таза. Для молодых спортивных людей угловые амплитуды таких наклонов торса вперед-назад относительно таза могут составлять до 45° (и даже больше), что отражено на фиг. указанием улов между осями: «b» {от английского «breast» - грудь) и «р» {от английского «pelvis» - таз).
Оборудование необходимое для организации работы угломерного датчика, предназначенного для измерения силовых управляющих воздействий, оказываемых человеком-оператором с целью осуществления таких наклонов торса экзоскелета вперед-назад относительно трусов экзоскелета, показано на фиг. №16. В устройстве используется «промежуточная деталь» №13 (наклонная пунктирная штриховка), механическая ось вращения №14, она сосна геометрической оси U - U', и упругая прокладка №15 (точечная штриховка). На фиг. №17 - показан условный чертеж спереди на промежуточную деталь №13, фиг. №18 - вид слева на промежуточную деталь №13, фиг. №19 -вид сверху, фиг. №20 - аксонометрический вид промежуточной детали №13. Фиг. №21 - разрез промежуточной детали по плоскости А-А (см. фиг. №17). Фиг. №22 - аксонометрическое изображение разреза, представленного на фиг. №21. Фиг. №23 - чертеж вида сзади на промежуточную деталь.
Фиг. №24 - аксонометрическое изображение вида сзади на промежуточную деталь №13.
Эластичная прокладка №15, устанавливаемая между задней жесткой частью трусов экзоскелета и промежуточной деталью №13 в разных проекциях изображена на фиг. №25 - 28. Где: фиг. №25 - вид спереди на эластичную прокладку. Фиг. №26 - вид на эластичную прокладку слева. Фиг. №27 - вид сверху. Фиг. №28 - аксонометрическое изображение эластичной прокладки №15.
На фиг. №29 представлено аксонометрическое изображение собранных вместе в единую систему трусов экзоскелета №8, промежуточной детали №13, оси вращения №14 и эластичной прокладки №15.
Попытка человека-оператора наклонить вперед свой торс относительно таза (см. фиг. №14) вызывает под действие усилий человека-оператора поворот трусов экзоскелета №8 относительно промежуточной детали №13, см. фиг. №30. - Величина этого поворота трусов экзоскелета №8 относительно промежуточной детали №13 с учетом деформации эластичной прокладки №15 позволяет электронике механизма подвеса определять величину и направлении прилагаемых человеком-оператором усилий. Это вызывает соответствующие повороты в узлах О'-А'-В' нижнего манипулятора и осуществляет изменение пространственного положения трусов экзоскелета относительно грудного одела экзоскелета, соответствующие наклону торса человека оператора вперед относительно таза - см. фиг. №31.
Если же человек-оператор оказывает на внутреннюю поверхность трусов экзоскелета усилия в противоположном направлении - наклоняет торс назад относительно трусов см. фиг. №15, то трусы экзоскелета поворачиваются вокруг оси №14 относительно промежуточной детали №13 в противоположном направлении - см. фиг. №32. Электроника механизма подвеса воспринимает это в качестве команды осуществить повороты деталей нижнего манипулятора в узлах О'-А'-В' таким образом, что трусы экзоскелета займут пространственное положение относительно грудного отдела экзоскелета соответствующее наклону торса назад - см. фиг. №33.
Наклоны торса человеческого тела влево-вправо (в стороны плеч) относительно таза демонстрируются фиг. №34 - для молодых спортивных людей угловые амплитуды таких наклонов (углы между осями «b» и «р», проведенными через торс и таз) могут достигать примерно 45°.
Датчик, определяющий усилия человека-оператора, управляющего антропоморфным роботом, совершать такие наклоны, также конструируют с использованием упругой деформируемой прокладки. В данном случае конструкция представляет аналог кулачковой муфты с упругой прокладкой, а датчик круговых перемещений (угловой энкодер) будет измерять повороты между полумуфтами. Для этого на стержне В' - F' нижнего манипулятора, ответственного за наклоны трусов экзоскелета, см. фиг. №35, насаживают подвижно «ведущую полумуфту» №16.
На фиг. №№36, 37, 38, 39 даны основные виды (вид спереди, слева и сверху) ведущей полумуфты №16 и ее аксонометрическое изображение. Ведущую полумуфту №16 можно принудительно поворачивать вокруг стержня-оси В'-F' нижнего манипулятора на ограниченный угол (Максимальная угловая амплитуда поворота этой ведущей полумуфты на оси В'-F' может составлять до 45° в одну и в другую сторону. Однако для каждого конкретного человека-оператора, дистанционно управляющего антропоморфным роботом-аватаром, эта максимальная угловая амплитуда будет существенно меньше - ее значение подбирают заранее в зависимости от индивидуальной гибкости конкретного человека-оператора). Промежуточную деталь №13 подвижно (с возможностью осуществлять вращения) также насаживают на стержень-ось В'-F' нижнего манипулятора таким образом, что кулачки ведущей полумуфты №16 размещаются в промежутках между кулачками промежуточной детали №13. При этом в пространстве между кулачками полумуфт находится упругая прокладка №17.
На фиг. №№40, 41, 42, 43 даны основные виды (спереди, слева и сверху) и аксонометрическое изображение упругой прокладки №17. Фиг. №44 дает представление о соосном расположении деталей №13, №16 и №17 (в данном случае они раздвинуты в пространстве) на одной геометрической оси В' - F'.
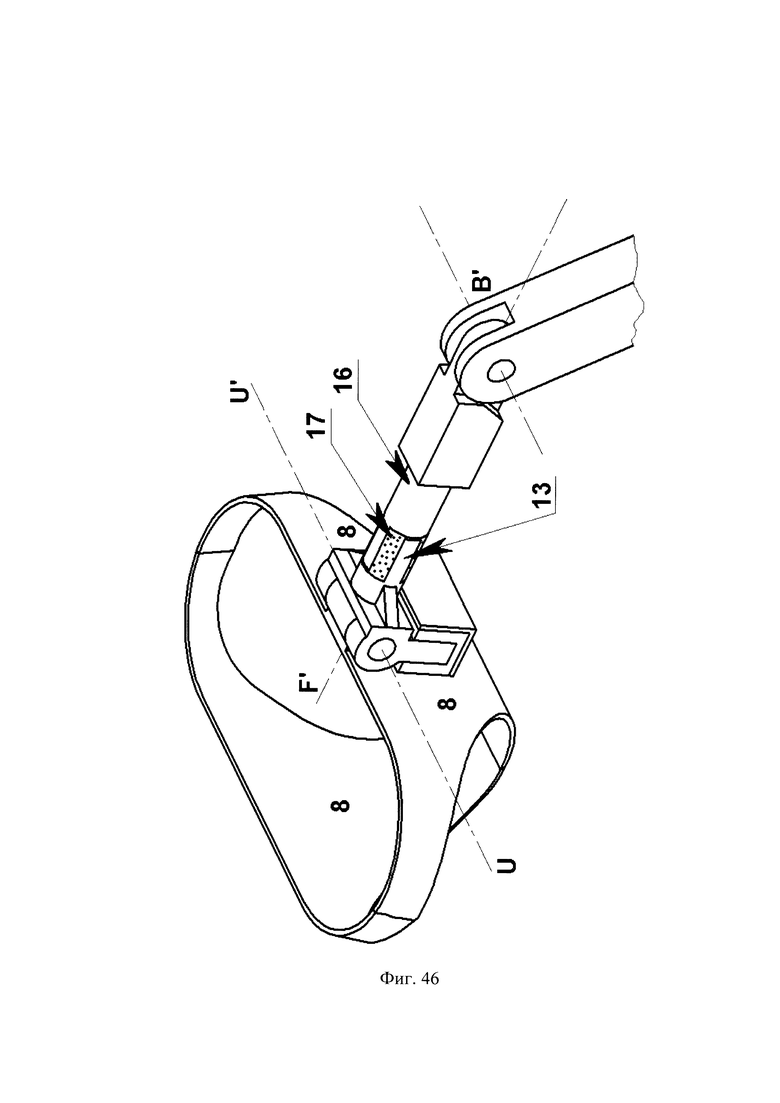
На фиг. №45 показана плотная состыковка деталей №13, №17 и №16. Фиг. №46 демонстрируется в аксонометрическом проекции окончательная сборка на нижнем манипуляторе деталей, ответственных за организацию работы датчиков, определяющих направления наклонов трусов экзоскелета относительно грудного отдела экзоскелета.
Усилия, наклоняющие трусы вправо-влево в стороны плеч, оказываемые человеком-оператором на внутреннюю поверхность трусов экзоскелета, передаются без изменений (ось №14, она же геометрическая ось U-U', перпендикулярна этим усилиям) на промежуточную деталь №13, в результате чего она немного поворачиваются вокруг механической оси F' - В' нижнего манипулятора относительно ведущей полумуфты №16. Эти небольшие повороты промежуточной детали №13 вокруг оси F'-В' относительно ведущей полумуфты №16 с учетом упругих деформаций расположенной между ними прокладки №17 позволяют цифровому абсолютному угловому энкодеру определить направление и величину силовых усилий человека-оператора. В результате чего электроника механизма подвеса после соответствующих вычислений наклонит трусы нужным образом.
Для эластичных прокладок, устанавливаемых между деталями нижнего манипулятора, желательно брать материал с большим модулем Юнга (условно говоря - использовать жесткие прокладки). При этом модуль Юнга эластичных прокладок, конечно, не должен превышать модуль Юнга (жесткость) силовых конструкций механизма подвеса. Жесткие эластичные прокладки в нижнем манипуляторе желательны по той причине, что это позволяет уменьшить влияние усилий человека-оператора, управляющего роботом, на изменения величин углов, измеренных цифровыми угловыми энкодерами в узлах (суставах) нижнего манипулятора и облегчит работу электронике. Однако увеличение жесткости эластичных прокладок вызывает проблему чувствительности электронных датчиков (угловых энкодеров), определяющих усилия оказываемые человеком-оператором на внутреннюю поверхность трусов. Решить эту дилемму можно посредством использования «механических редукторов, повышающих обороты» т.н. «мультипликаторов». Нечто подобное используется в барометрах-анероидах и в волосяных гигрометрах - за счет использования системы рычагов с большим отношением плеч и нитей (волоса), намотанных на шпиндель указательной стрелки (при этом шпиндель имеет малый диаметр), удается получить значительные угловые повороты указательных стрелок при относительно малых деформациях измерительных элементов (гофрированной вакуумированной коробочки и обезжиренного волоса). В нашем случае можно использовать механический мультипликатор. Принцип его работы демонстрируется на фиг. №47, где слева условно показаны две шестеренки - №13 обозначена шестеренка большого диаметра (на поверхность промежуточной детали №13 могут быть нанесены зубья, так что она в данном случае может считаться шестеренкой). С ней приходят в соприкосновение зубья шестеренки меньшего диаметра №18. Для удобства понимания на шестеренках изображены указательные линии - на фиг. №47 они расположены вертикально. В правой части фиг. №47 дан вид «слева» на шестеренки №13 и №18 - используются стандартные обозначения, применяемые на схемах. В нашем случае поворот шестеренки №13 (промежуточной детали №13 нижнего манипулятора механизма подвеса) вызовет поворот с большей угловой амплитудой (с бо'льшей угловой скоростью) шестеренки №18, что показано на фиг. №48 - шестеренка №13 (промежуточная деталь №13 нижнего манипулятора) повернулась на угол 20° против часовой стрелки, в то время как шестеренка №18 (ее указательная линия) повернулась по часовой стрелке на угол 90°. Если при этом вал углового абсолютного энкодера будет насажен на ось шестеренки №18, то мы получаем увеличение чувствительности системы в 4,5 раз. Учитывая, что мультипликатор может содержать в себе несколько аналогичных шестереночных звеньев, то понятно, что чувствительность может быть повышена в больше число раз. (При этом в шестереночном мультипликаторе будет необходимо избавиться от люфта между шестеренками - эта задача вполне решаема, но в данной заявке этот вопрос не рассматривается). Можно также продемонстрировать способ увеличения чувствительности работы датчика кругового перемещения с помощью фрикционной ременной передачи - см. фиг. №49. Где стандартными условными обозначениями, применяемыми в черчении, показаны шкивы с перекинутыми между ними ремнями (№13 условно обозначен шкив на промежуточной детали №13 нижнего манипулятора механизма подвеса). Угловой энкодер в данном случае будет измерять величину поворота шкива №19. Так как в данном случае передаточных звеньев-шкивов, вовлеченных во вращения, больше, чем на ранее рассмотренной фиг. №47 с шестеренками, то и усиление чувствительности будет больше. Так на фиг. №50 показано, что шкив №13 (промежуточная деталь №13 нижнего манипулятора механизма подвеса) повернулся на 2° по часовой стрелке, а самый маленький шкив №19, расположенный на фиг. №50 сверху, повернулся при этом на 53° - получаем увеличение чувствительности угловых измерений в 26,5 раз. Таким образом, благодаря мультипликаторам разного типа можно будет повысить чувствительность применяемых в устройстве абсолютных угловых энкодеров с кодом Грея, что позволяет использовать в механизме подвеса для измерения моментов сил эластичные прокладки с большей жесткостью.
В принципе для определения направления силовых воздействий, оказываемых человеком-оператором на внутреннюю поверхность трусов экзоскелета и вызывающих наклоны (вперед-назад, влево-вправо) трусов относительно грудного отдела экзоскелета вполне достаточно ранее описанных датчиков (цифровых угловых энкодеров), сопряженных с промежуточную деталь №13, расположенной между трусами экзоскелета и нижним манипулятором.
Однако на оси Q-О' нижнего манипулятора механизма подвеса можно добавить еще один датчик кругового перемещения (угловой энкодер) с использованием в его работе деформируемой эластичной прокладки - см. фиг. №51. Организация работы этого дополнительного датчика будет полностью аналогична организации работы рассмотренного ранее датчика, образованного деталями №№13, 16, 17. В данном случае, в организации работы дополнительного датчика, размещенного на оси Q-О' нижнего манипулятора опять используется аналог кулачковой муфты с эластичной прокладкой №20; ведущая полумуфта, она расположена ближе к основанию Q нижнего манипулятора, обозначена №21 и №22 обозначена ведомая полумуфта. Ранее на фиг. №35 эллипсами со стрелками были показаны повороты деталей нижнего манипулятора механизма подвеса в узле О'. Теперь на фиг. №51 эллипсами со стрелками показаны дополнительные повороты деталей нижнего манипулятора вокруг оси Q - О'. Таким образом, дополнительный угловой энкодер измеряет изменение угла между деталями №21 и 22 нижнего манипулятора, что дает электронике механизма подвеса дополнительную возможность определять силовые воздействия оказываемые человеком-оператором на внутреннюю поверхность трусов экзоскелета, при совершении человеком-оператором наклонов трусов экзоскелета влево-вправо относительно торса (условно говоря - в стороны плеч).
В общем случае нижний манипулятор механизма подвеса позволяет подстраиваться под людей-операторов с разной анатомией. Однако в некоторых исключительных ситуациях, когда длина туловища человека-оператора очень сильно отличается от средних стандартов, возможно, использовать дополнительную настройку нижнего манипулятора путем смещения всего нижнего манипулятора вверх или вниз относительно вертикальной оси грудного одела экзоскелета - смотрите фиг. №52 и №53 (вдоль оси G-G'). Для этого в основании нижнего манипулятора механизма подвеса имеются пазы №23 - см. фиг. №54. Благодаря этим пазам нижний манипулятор может двигаться по направляющей №24, располагающейся на внутренней поверхности вертикальной дуги - см. фиг. №55 и №56.
До сих пор мы рассматривали организацию работы датчиков, ответственных только за наклоны трусов экзоскелета (вперед-назад, влево-вправо) относительно грудного отдела экзоскелета - примеры таких движений человеческого тела приведены на фиг. №№14, 15, 34. Теперь необходимо рассмотреть организацию работы датчиков, которые совместно с силовыми приводами позволят осуществить повороты верхнего грудного отдела туловища человека-оператора относительно таза вокруг вертикальной оси грудного отдела - пример таких поворотов показан на фиг. №57.
Следует учитывать, что в обычной жизни торс человека (верхняя часть туловища) поворачивается или наклонятся относительно таза за счет усилий мускул, расположенных в середине тела человека (за счет мускул, расположенных на животе и на спине между тазом и грудным отделом). Поэтому в соответствии с III законом Ньютона таз и торс человека получают от мышц, расположенных в средине туловища, одинаковые по модулю и противоположные по направлению силовые воздействия.
Поэтому датчики, определяющие силовые воздействия поворачивающие торс оказываемые человеком изнутри на трусы экзоскелета, размещаем... в грудном отделе экзоскелета.
На фиг. №58 показано крепление грудного отдела (жесткого жилета) управляющего экзоскелета №10 к стержню №25 механизма подвеса, внутренне кольцо механизма подвеса и заспинная дуга обозначены №1. Грудной отдел экзоскелета №10 крепится на стержне №25 подвижно, для этого используется ось вращения №26 - см. фиг. №59. Ось вращения №26 параллельна вертикальной оси G'-G грудного отдела экзоскелета - параллельна вертикальной оси торса (хребту) человека-оператора и в конструкции грудного одела экзоскелета на жестком жилете располагается максимально близко к хребту человека-оператора.
На окончании стержня №25 имеется «упорная плита» №27 с петлей №28, в которую продевается ось вращения №26 - фиг. №60.
Между грудным отделом экзоскелета №10 (жестким жилетом) и плитой №27 располагают эластичные прокладки №29 и датчики давления №30 - см. фиг. №61.
На фиг. №62 показан в разобранном виде (набор деталей) узел, ответственный за измерение поворачивающих усилий, вызывающих поворот таза вокруг вертикальной оси грудного отдела экзоскелета. На фиг. №63 показан узел, ответственный за измерение поворачивающих усилий, вызывающих поворот таза вокруг вертикальной оси грудного отдела экзоскелета, показан в собранном виде.
Таким образом, силовые воздействия, развиваемые мышцами живота и спины в средине туловища человека-оператора, предназначенные повернуть торс человека относительно таза (или таз относительно торса), вызывают небольшой поворот грудного отдела (жесткого жилета) экзоскелета №10 вокруг оси №26, параллельной вертикальной оси грудного отдела, относительно трусов экзоскелета. Это приводит к деформации эластичных прокладок №29 и изменению показаний датчиков давления №30, что позволяет электронике механизма подвеса определить направление, в котором необходимо повернуть вертикальную дугу, чтобы задать надлежащий поворот трусов экзоскелета относительно грудного отдела экзоскелета. (В принципе, здесь, как и ранее, можно использовать угловой энкодер с мультипликатором, расположив их на оси №26, но я для разнообразия в данном случае рассматриваю использование датчиков давления). Результат работы узла, измеряющего силовые усилия, скручивающие туловище человека-оператора (поворот таза относительно грудного отдела вокруг вертикальной оси грудного отдела) показан на фиг. №64 - электроника, сравнивая показаний левого и правого датчиков №30, расположенных за спиной человека-оператора (между жестким жилетом и плитой), приходит к выводу, что надо повернуть вертикальную дугу вокруг оси G-G'. Вместе с вертикальной дугой вокруг оси G - G' поворачивается и нижний манипулятор, а вместе с ним трусы и, соответственно, целиком штаны экзоскелета.
Следует учитывать, что основание головного манипулятора O-A-B-F-G крепится к грудному отделу экзоскелета №10 жестко и что конструкция головного манипулятора, осуществляющего подвес шлема относительно грудного одела экзоскелета, ни коем образом не входит в контур управления тазом, поэтому наклоны и повороты головы человека-оператора не оказывают влияния на работу датчиков №30 (не вызывают деформации упругих прокладок №29 и взаимных небольших поворотов деталей №10 и №27 на оси №26). Поэтому повороты и наклоны головы человека-оператора не будут оказывать влияний на работу датчиков, ответственных за ориентацию таза относительно грудного отдела. (Работа датчиков, ответственных за наклоны и повороты шлема была проанализирована мной в заявке на изобретение №2019100888). Теперь рассмотрим улучшение работы головного манипулятора, осуществляющего подвес шлема экзоскелета. В заявке на изобретение №2019100888 рассматривались математические формулы, описывающие работу головного манипулятора. Эти математические формулы носили самый общий (приближенный) характер - было просто показано, что мы можем производить расчеты, по алгоритму, который можно записать в электронику (либо аппаратно, либо программно). Однако в этих математических формулах никак не учитывался эффект изменения длины шеи человека-оператора при сильных наклонах головы. Между тем факт изменения длины шеи, ее укорочение, при сильных наклонах имеет важное значение для обеспечения правильного управления руками-манипуляторами робота при дистанционном управлении роботом в копирующем режиме. С этой проблемой уже столкнулись производители робота-аватара ФЕДОРА - плохую моторику рук-манипуляторов своего робота они ошибочно называют «Робастностью». Хотя на самом деле мы в данном случае сталкиваемся с классическим проявлением эффекта «Подростковой неуклюжести». В силу того, что длина конечностей дистанционно управляемого робота отличается (пусть и немного) от длины конечностей управляющего им человека-оператора, создатели робота ФЕДОРа не могут при одинаковых углах в узлах-суставах получить тождественной локализации в пространстве кистей манипуляторов робота ФЕДОРа, аналогичной той пространственной локализации, которую имеют кисти рук человека-оператора. - Для обеспечения более точного позиционирования верхних конечностей дистанционного антропоморфного робота соответственно верхним конечностям человека-оператора необходимо обеспечить в каждый момент времени тождество пропорций условных фигур, определяемых расстояниями между глазами и кистями рук - см. фиг. №65. Где с левой стороны изображения показана верхняя часть тела человека-оператора - справой стороны изображена верхняя часть антропоморфного робота. На поверхности этих изображений наложены линии, показывающие расстояние и углы между глазами (камерами) - ER-EL, плечами R-L, локтями и «основными рабочими инструментами» - кистями рук (кистями манипуляторов). Для обеспечения хорошего управления манипуляторами робота в копирующем режиме необходимо, чтобы пропорции и углы всех этих наложенных линий были одинаковы в любой момент времени - проблема «Подростковой неуклюжести» подробно рассматривалась мной в заявке на изобретение №2019114420. Поэтому необходимо учитывать изменение длины шеи человека-оператора при сильных наклонах головы.
Изменение длины шеи человека обусловлено ее анатомическим строением - семью шейными позвонками - см. фиг. №66.
Продемонстрировать изменение расстояние от основания шеи (точка D) до основания черепа (точка С) легче всего на биологических организмах с длинной шеей, например, с помощью шеи жирафа и лошади. Очевидно что длина шеи (расстояние С-D) будет максимальной, если шейные позвонки выстроятся вдоль одной линии, как это показано на фиг. №67 (изображение взято из Интернета). Если же шея жирафа согнута, например, в дугу - см. фиг. №68 (изображение взято из Интернета), или, если позвонки шеи расположены S-образно - см. фиг. №69 (в данном случае эффект демонстрируется на скелете лошади, т.к. с жирафом нужного изображения в Интернете мне найти не удалось), то длина шеи, расстояние от точки D до точки С, будет короче. Аналогичные уменьшения расстояния D-C характерно и для шеи человека при наклонах головы вперед-назад и в стороны плеч. Введем математическую формулу, моделирующую изменение длины шеи человека в зависимости от углов в основании шеи и углов основании черепа:

Где:
L - вычисленная длина шеи - в дальнейшем это значение используется в работе головного манипулятора;
постоянная «песк» - максимальная длина шеи человека, она определяется для каждого конкретного человека-оператора эмпирически в случае, когда все позвонки шеи человека выстроены вдоль одной прямой - см. фиг. №66;
 углы в основании шеи и в основании черепа, возникающие при наклонах головы вперед-назад относительно торса - см. фиг. №70;
углы в основании шеи и в основании черепа, возникающие при наклонах головы вперед-назад относительно торса - см. фиг. №70;
 углы в основании шеи и в основании черепа, возникающие при наклонах головы влево-вправо в стороны плеч - см. фиг. №71; появление коэффициентов 0.05 объясняется тем, что каждый угол D или С вносит по 5% в укорочение шеи, суммарно 10%;
углы в основании шеи и в основании черепа, возникающие при наклонах головы влево-вправо в стороны плеч - см. фиг. №71; появление коэффициентов 0.05 объясняется тем, что каждый угол D или С вносит по 5% в укорочение шеи, суммарно 10%;
знаменатель 22.5° получается из-за того, что голова человека может наклоняться от вертикали вперед или назад на угол 45° - см. еще раз фиг. №70. Поэтому каждый угол D и С вносит в эти наклоны по 22.5°. Пусть длина шеи человека будет наибольшая, если углы D и С равны 90° - смотрите фиг. №66 и 72, полученную как скриншот с экрана монитора компьютера - на момент написания этого текста мной уже разработана компьютерная программа, которая демонстрирует работу алгоритма головного манипулятора, вот я и использую в описании заявленного изобретения скриншот. При отличии углов D или С от 90° длина шеи уменьшается.
Сделаю несколько замечаний.
В реальной конструкции механизма подвеса длину шеи и ее укорочение придется учитывать индивидуально для каждого конкретного человека-оператора. Для этого перед началом первого сеанса управления роботом человеку-оператору вначале придется пройти измерение индивидуальной анатомии и внести эти данные в память электроники, управляющей механизмом подвеса. (У разных людей максимальная длина шеи может достигаться при разных значения углов D и С. - Это зависит от сутулости человека-оператора, управляющего роботом. Приведенная здесь формула №1 условная - она используется здесь только для демонстрации эффекта укорочения шеи и доказательства того, что углы О, А и В можно вычислять. В реальности изменение длины шеи от углов D и С может описываться и другими функциями, но сейчас это ни коем образом не влияет на правильность работы расчетного алгоритма, позволяющего вычислять углы сгибания узлов-суставов О, А, В головного манипулятора, как функции углов 
Договоримся, что в компьютерной программе, предназначенной для демонстрации работы алгоритма, управляющего головным манипулятором, не буем рассматривать наклоны головы влево и вправо в стороны плеч (и соответственно не будем рассматривать укорочение шеи от углов Остановимся только на наклонах головы вперед - назад. В этом случае формула №1 упростится:
Остановимся только на наклонах головы вперед - назад. В этом случае формула №1 упростится:

Очевидно, что производители роботов не захотят делать сложную, ненадежную конструкцию шеи роботов ИЗ СЕМИ позвонков. С большой вероятностью шея роботов будет изготовлена из одного стержня, как это было описано мной в заявке на изобретение №2019100888. А чтобы осуществить эффект укорочения шеи при наклонах головы робота можно будет смещать глаза-камеры робота внутри шлема-головы робота, как это было мной описано в заявке на изобретение №2019114420 - смотрите фиг. №73, где №31 - бронированный шлем головы робота; №32 - оптически прозрачный иллюминатор в шлеме робота; №33 глаза-камеры робота, способные смещаться вверх-вниз в зависимости от потребностей.
Либо можно сделать шею робота телескопической - способной укорачиваться при наклонах головы робота в той же мере, как в какой мере укорачивается шея человека-оператора, управляющего данным роботом. Но телескопическая шея может оказаться нежелательной при необходимости бронировать шею робота.
Как бы там ни было - мы получили возможность учитывать эффект укорочение шеи человека-оператора. Подобное же укорочение, в силу анатомии человека-оператора, будет наблюдаться и для нижней части тела человека при совершении им наклонов торса относительно таза. Учтем, что кинематика нижнего манипулятора схожа с кинематикой головного манипулятора, поэтому нет необходимости подвергать разбору укорочение тела человека-оператора - достаточно анализа укорочения шеи при наклонах головы.
Теперь непосредственно рассмотрим работу алгоритма, позволяющего вычислить углы О, А, В сгибания узлов-суставов головного манипулятора, как функции от углов D и С с учетом функции укорачивания шеи №2. Эта блок-схема (математика) гарантированно позволяет создать электронику или программное обеспечение. Будем рассматривать процессы на примере головного манипулятора О-А-В - смотрите использовавшиеся здесь ранее фиг. №8 и №63. (Для нижнего манипулятора О'-А'-В' вычислительная блок-схема будет в значительной степени аналогична, поэтому для нижнего манипулятора обсуждения не будет). Далее нам придется воспользоваться математическими формулами и графическими материалами из описания заявки на изобретение №2019100888 - здесь они представлены фиг. под №74, 75, 76, 77. (Математические формулы я немного изменил по сравнению с заявкой №2019100888 - не стал использовать функцию «arc sin» - использую во всем алгоритме только «arc cos», но это не меняет сути).
Наклон вперед-назад головы человека-оператора относительно грудного отдела экзоскелета задается принудительными изменениями значений углов О, А и В в узлах-суставах головного манипулятора - см. фиг. №74.
Для головного манипулятора можно начертить упрощенную кинематическую схему - см. фиг. №75, где введены вектора: вектор L - расстояние от основания шеи до основания черепа человека-оператора; вектор r - расстояние от основания черепа человека-оператора до узла-сустава В головного манипулятора; вектор р - расстояние от основания шеи человека-оператора до узла О головного манипулятора; вектора h и е - стержни головного манипулятора. Направления отсчета углов показаны на фиг. №75 стрелками.
Наклон вперед-назад головы человека-оператора (шлема экзоскелета) относительно торса (грудного отдела экзоскелета) измеряется углами D и С. Для задания с помощью головного манипулятора определенного наклона головы, определяемого значениями углов D и С, необходимо вычислить значения улов О, А, В. Математикам для этого вполне достаточно информации, приведенной в описании заявки на изобретение №2019100888. Но для написания подробной блок-схемы, предназначенной для цифровых вычислительных устройств, необходимо учитывать одну особенность - большинство компьютеров не могут напрямую вычислять значения углов посредством обратной функции «arc cos» - это необходимо делать через функцию «arc tg», которую-то как раз компьютеры и умеют вычислять. Из-за этого при составлении подробной блок-схемы придется использовать дополнительный анализ и дополнительные переменные для временного хранения значений промежуточных вычислений и проверять дополнительные условия, вызывающие разветвления блок-схемы. Дело в том, что функция «arc tg» определена на всей числовой прямой вещественных чисел:  однако область выдаваемых компьютерами результатов при вычислении значений функции «arc tg» ограничена диапазоном -90° -+90°. Поэтому для правильного вычисления значений углов О, А, В необходимо будет рассматривать (математическими методами) «треугольники», возникающие в манипуляторе - если посредством математических вычисления выяснится, что искомый угол «тупой», то значение угла вычисляется путем разности: 180° минус абсолютное значение ранее вычисленной значение функции «arc tg» в диапазоне острого угла.
однако область выдаваемых компьютерами результатов при вычислении значений функции «arc tg» ограничена диапазоном -90° -+90°. Поэтому для правильного вычисления значений углов О, А, В необходимо будет рассматривать (математическими методами) «треугольники», возникающие в манипуляторе - если посредством математических вычисления выяснится, что искомый угол «тупой», то значение угла вычисляется путем разности: 180° минус абсолютное значение ранее вычисленной значение функции «arc tg» в диапазоне острого угла.
Теперь, после такого предварительного объяснения, перейдем непосредственно к рассмотрению блок схемы: для вычисления углов О, А, В в зависимости от значений углов С и D. Для этого введем дополнительные углы «и» и «V» и воображаемый вектор ОВ - см. фиг. №75.
Еще две фигуры с кинематической схемой головного манипулятора представлены на фиг. №76 и №77 - они в дальнейшем будут необходимы для вычисления значения угла В - на этих фиг. введен в рассмотрение воображаемый вектор АС.
Подробная блок-схема алгоритма вычислений представлена на фиг. №78, №79, №80. Математические формулы вписаны в соответствующие блоки блок-схемы, пояснения к формулам даны в тексте описания заявки.
Вначале в блок-схему вводятся значения углов D и С, определяющие желаемый (будущий) наклон вперед-назад головы человека-оператора - блок №1. Далее в блоке №2 блок-схемы алгоритма последовательно производится несколько вычислений - рассчитываются длина шеи L в зависимости от заданных значений углов D и С, вычисляются компоненты вектора ОВ: ОВх и ОВу, с помощью теоремы Пифагора вычисляется длина вектора ОВ, а также в блоке №2 через функцию «arc tg» вычисляется значение угла и (Подразумевается, что длина вектора р всегда больше суммы длин векторов Lwr поэтому угол и (см. фиг. №74) всегда острый и для его вычисления можно напрямую, без всяких дополнительных условий, использовать функцию «arc tg», что и отображено в блоке №2).
В блоке №3 в дополнительную переменную cosV, предназначенную для временного хранения промежуточных вычислений, записываем значение «cos угла V», полученного с помощью теоремы косинусов из треугольника ОАВ - см. фиг. №75.
В блоке №4 проверяется - является ли угол V треугольника ОАВ прямым (это возможно только при условии, что значение в переменной cosV=0) - в этом случае в блоке №5 блок-схемы нашего алгоритма углу V присваивается значение 90°. В противном случае в блоке №6 происходит вычисление значение острого угла V посредством функции «arc tg». После этого в блоке №7 проверяем: не является ли угол V тупым, и если он в треугольнике ОАВ тупой, то в блоке №8 вычисляем значение тупого угла V вычитанием из 180° ранее вычисленного блоке №6 значения острого угла V.
Далее из-за того, что блок-схему приходится отображать на другой странице, используем на фиг. №77 соединитель №9.
После этого в блоке №10 (см, фиг. №78) производим вычисление угла О, а затем с помощью теоремы косинусов вычисляем cos внутреннего угла А треугольника ОАВ - смотрите фиг. №75. Далее посредством анализа значения переменной cosA вычисляем значение внутреннего угла А треугольника ОАВ - блоки 11-15 блок-схемы алгоритма.
В блоке №16 первым делом вычисляют искомый нами внешний угол А путем вычитания из 360° ранее полученного значения внутреннего угла А треугольника ОАВ. После этого в том же блоке №16 с помощью теоремы Пифагора вычисляем длину вектора АС - см. фиг. №76 и №77 - для этого складываем квадраты компонент вектора АС, а затем извлекаем квадратный корень. Далее в блок-схеме идет соединитель №17.
Используя теорему косинусов для треугольника ABC и ранее полученное в блоке №16 значение длины вектора АС, вычисляем в блоке №18 значение cos угла В. Последующие блоки №19-23 традиционно позволяют нам найти промежуточное значение угла В.
Однако следует учитывать то обстоятельство, что блоки №19-23 позволяют вычислять угол В в диапазоне от 0° до 180° - фиг. №77 демонстрирует эту ситуацию, в то время как угол В в некоторых случаях может превышать 180° -эту ситуацию демонстрирует фиг. №76. Чтобы выяснить указанное обстоятельства необходимо сравнить наклоны векторов АС и АВ - для этого в блоке №24 предварительно выполняем вычисление тангенсов векторов АС и АВ. Далее в блоке №25 осуществляем сравнение значений тангенсов (наклонов векторов), и если оно выполняется, то угол В пересчитывается, как разность: 360° минус ранее вычисленное значение угла В - блок №26. После этого используем блок-соединитель с №0, изображенный на фиг. №80, что возвращает нас в самое начало блок-схемы - см. фиг. №78 - таким образом, получается бесконечный цикл: требуется получить определенный наклон головы, определяемый углами D и С, и приведенная на фиг. №78 - 80 блок-схема алгоритма позволяет вычислить необходимые для этого значения углов О, А, В.
Для проверки работы приведенной блок-схемы алгоритма составлена демонстрационная программа, которая вместе с остальными материалами будет выложена в Интернет после регистрации данной заявки на изобретение в Роспатенте. Доступ к программе по ссылке:

Представленные здесь методы улучшения подвижности бедренных суставов и шлема экзоскелета, применяемого для управления антропоморфным дистанционным роботом, могут быть в полной мере использованы не только с механизмом подвеса гироскопического типа, состоящим из вложенных друг в друга колец, выполненных с возможностью принудительного вращения относительно друг-друга, как это описано в заявке №2019100888 и в патенте на изобретение №2134193, но и в упрощенном устройстве управления роботом, с использованием эффекта Гальванической вестибулярной стимуляции. Дело в том, что в некоторых случаях для дистанционного управления в копирующем режиме антропоморфным (полуантропоморфным) роботом-аватаром, а также для работы на тренажерах VR (виртуальной реальности) или при эксплуатации игровых устройств VR может НЕ требоваться слишком точного задания угловой пространственной ориентации тела человека-оператора относительно вертикали.
Это, например, может быть дистанционное управление в копирующем режиме антропоморфным (полуантропоморфным) роботом-аватаром в безопорной среде (в космической невесомости), где вертикальное положение априори неопределенно (не имеет значения). Для человека-оператора, осуществляющего управление космическим роботом, будут важны лишь повороты корпуса робота относительно окружающих робота космических объектов - Солнца, звезд, космических аппаратов. При этом избыточная точность угловой ориентации тела человека-оператора, управляющего роботом, здесь будет не важна. Другой случай - почти безопорная среда - управление в копирующем режиме подводным роботом в толще воды (без необходимости шагать по дну водоема). Третий случай - управление полуантропоморфным роботом, передвигающимся по местности на относительно устойчивом основании (на многоколесной или на гусеничной широкой платформе) по относительно ровной поверхности (условно горизонтальная поверхность). И четвертый случай - игровые симуляторы VR, не требующие большой практической ответственности и, соответственно, точности управления.
Поэтому ощущения «поворотов» тела человека в этих случаях в механизмах VR могут быть симулированы посредством «Эффекта гальванической вестибулярной стимуляции» (GVS), который позволяет манипулировать ощущениями органов равновесия человека.
При этом на тело человека-оператора предварительно надевают силовой экзоскелет, который позволит человеку-оператору ощущать своими органами чувств пространственное положение конечностей робота (положение конечностей игрового персонажа в игровом симуляторе VR), т.е. ощущать пространственную позу управляемого объекта. Затем тело человека-оператора подвешивают в пространстве за спину таким образом, что человек не достает своими конечностями до окружающих предметов и может свободно совершать движения своими конечностями перед собой, по бокам, сверху и снизу. Подвес и управление движениями шлема (головой человека-оператора) и нижней частью экзоскелета (штанами экзоскелета) осуществляют посредством специальных силовых манипуляторов со стороны спины человека-оператора.
Такое «Устройство управления роботом-аватаром и симулятором виртуальной реальности с использованием эффекта гальванической вестибулярной стимуляции» изображено на фиг. №81 - вид слева.
Где цифрами обозначено:
№7 - часть (четверть) вертикальной дуги, которая способна принудительно поворачиваться вокруг вертикальной оси G - G' и как следствие поворачивать вокруг этой оси нижний манипулятор Q-O'-A'-B' и полужесткие трусы №8 экзоскелета (в общем случае штаны экзоскелета);
№9 - шлем виртуальной реальности со встроенными в него аудио и видеосистемами, а также и системой гальванической вестибулярной стимуляции органов равновесия человека;
№10 - грудной сегмент экзоскелета, надетого на человека;
№25 - жесткий стержень, осуществляющий подвес грудного сегмента экзоскелета со стороны спины;
Символами: О-А-В - обозначены узлы-суставы головного манипулятора, осуществляющего подвес и движения шлема (подвес и движения головы человека-оператора) относительно грудного сегмента экзоскелета; Символами: Q-O'-A'-B' - обозначены узлы-суставы нижнего манипулятора, осуществляющего совместно с четвертью вертикальной дуги №7 подвес и движения (наклоны и повороты) нижнего сегмента экзоскелета (штанов экзоскелета) относительно грудного сегмента. Работа нижнего манипулятора организована с учетом всех методов, позволяющих улучшить подвижность бедренных суставов - они рассмотрены ранее в данной заявке. Поэтому на фиг. №81 встречаются обозначения, ранее использовавшиеся при обсуждении организации работы датчиков, ответственных за наклоны и повороты трусов (штанов) экзоскелета - указана прокладка №29 и промежуточная деталь №13;
№34 - обозначена внешняя жесткая опора (наклонная штриховка), задающая угол 90° между стержнем №25, подвешивающим грудной сегмент экзоскелета и осью G-G' грудного сегмента экзоскелета, относительно которой на четверти вертикальной дуги №7 происходит поворот нижнего сегмента (штанов) экзоскелета.
На фиг. №82 показан аксонометрический вид на только что рассмотренное устройство управления с использованием «Эффекта гальванической вестибулярной стимуляции».
Такое устройство управления с GVS будет иметь более компактные размеры по сравнению с устройствами управления, ранее описанных в патенте на изобретение №2134193 ш и в заявке на изобретение №2019100888 - «Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом» -  , что может быть полезно в тесных замкнутых пространствах (в подводных и космических обитаемых аппаратах, в военных бункерах).
, что может быть полезно в тесных замкнутых пространствах (в подводных и космических обитаемых аппаратах, в военных бункерах).
Однако следует заметить, что в силу малой точности задания угловой ориентации при использовании эффекта гальванической вестибулярной стимуляции применение такого устройства управления с GVS для обеспечения вертикальной ходьбы антропоморфного робота-аватара представляется малоперспективным.
В заключение остается обратить внимание на то, что уже в 1997 году в патенте на изобретение №2134193 указывалась потребность использовать в работе механизма подвеса т.н. «электронных противовесов». Которые планировалось применять с целью компенсации веса надеваемых на конечности человека-оператора устройств, задающих пространственное положение конечностей робота, и веса конечностей робота - смотрите по этому вопросу ссылку  Создание таких электронных противовесов весьма трудоемкая из-за своей объемности, но рутинная задача, решаемая математически с помощью матричных операций (Надо сказать, что в данный момент уже существуют реальные устройства с электронными противовесами, компенсирующими вес оборудования на конечности человека-оператора, управляющего роботом. Во всяком случае, создатели российского антропоморфного робота-аватара ФЕДОРа утверждают в Интернете, что им удалось решить эту задачу - соответствующие ссылки: страница №4
Создание таких электронных противовесов весьма трудоемкая из-за своей объемности, но рутинная задача, решаемая математически с помощью матричных операций (Надо сказать, что в данный момент уже существуют реальные устройства с электронными противовесами, компенсирующими вес оборудования на конечности человека-оператора, управляющего роботом. Во всяком случае, создатели российского антропоморфного робота-аватара ФЕДОРа утверждают в Интернете, что им удалось решить эту задачу - соответствующие ссылки: страница №4  и
и  ).
).
Рассмотренные здесь методы улучшения подвижности бедренных суставов и шлема в экзоскелете, применяемом для дистанционного управления антропоморфного шагающим роботом, также подразумевают использование «электронных противовесов» для компенсации веса оборудования на человеке-операторе или даже для создания у человека в некоторой степени чувства невесомости (если компенсировать не только вес надеваемого на человека оборудования, но и вес собственных биологических конечностей человека-оператора). Также возможно использование рассмотренных здесь методов улучшения подвижности бедренных суставов и шлема и без компенсации веса оборудования, но это не желательно, потому что такой режим будет приводить к быстрому утомлению человека-оператора.
Перечень фигур к заявке на изобретение
1. Демонстрация «Маха ногой вперед»
2. Демонстрация высокого поднятия ноги при движении парадным шагом
3. Поднятие ноги при лазании по стремянке
4. Демонстрация (вид спереди) условного взаимного расположение шести вложенных колец механизма управления антропоморфным роботом и экзоскелета внутри них
5. Демонстрация (аксонометрический вид) условного взаимного расположение шести вложенных колец механизма управления антропоморфным роботом и экзоскелета внутри них
6. Демонстрация (аксонометрический вид) реального взаимного расположение шести вложенных колец механизма управления антропоморфным роботом и экзоскелета внутри них
7. Условное деление экзоскелета на три части: трусы (штаны), шлем и грудной отдел
8. Приседание на корточки - при этом бедра ног немного вдавливаются в живот.
9. Аксонометрический вид на экзоскелет, вертикальную дугу и головной и нижний манипулятор
10. Полу жесткие трусы - вид спереди
11. Полужесткие трусы - вид сбоку
12. Полужесткие трусы - аксонометрический вид спереди
13. Полужесткие трусы - аксонометрический вид сзади
14. Изгиб спины человека при выполнении гимнастического упражнения «кошка»
15. Прогиб спины человека при выполнении гимнастического упражнения «корова»
16. Вид сбоку на полужесткие трусы, промежуточную деталь, и упругую прокладку
17. Промежуточная деталь - вид спереди
18. Промежуточная деталь - вид сбоку
19. Промежуточная деталь - вид сверху
20. Промежуточная деталь - аксонометрическая проекция вида сбоку
21. Разрез промежуточной детали
22. Разрез промежуточной детали - аксонометрический вид
23. Промежуточная деталь - вид сзади
24. Промежуточная деталь - аксонометрическая проекция вида сзади
25. Упругая прокладка - вид спереди
26. Упругая прокладка - вид сбоку
27. Упругая прокладка - вид сверху
28. Упругая прокладка - аксонометрический вид
29. Аксонометрическая проекция вида сзади на полужесткие трусы, упругую прокладку и промежуточную деталь
30. Демонстрация небольшого поворота полужестких трусов относительно промежуточной детали, возникающего при совершении человеком-оператором наклонов торса вперед
31. Демонстрация наклона торса вперед относительно вертикальной дуги
32. Демонстрация небольшого поворота полужестких трусов относительно промежуточной детали, возникающего при совершении человеком-оператором наклонов торса назад
33. Демонстрация наклона торса назад относительно вертикальной дуги
34. Демонстрация наклонов торса влево-вправо в стороны плеч
35. Указание детали, принудительно осуществляющей на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса
36. Вид спереди на деталь, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса
37. Вид сбоку на деталь, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса
38. Вид сверху на деталь, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса
39. Аксонометрический вид на деталь, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса
40. Вид спереди на упругодеформируемую прокладку, располагающуюся между деталью, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса и промежуточной деталью
41. Вид сбоку на упругодеформируемую прокладку, располагающуюся между деталью, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса и промежуточной деталью
42. Вид сверху на упругодеформируемую прокладку, располагающуюся между деталью, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса и промежуточной деталью
43. Аксонометрический вид на упругодеформируемую прокладку, располагающуюся между деталью, принудительно осуществляющую на нижнем манипуляторе наклоны вправо-влево таза (трусов экзоскелета) относительно торса и промежуточной деталью
44. Соосное расположение в разобранном виде на промежуточную деталь, упругую прокладку и деталью, осуществляющую на нижнем манипуляторе наклоны вправо-влево торса (трусов экзоскелета) относительно торса
45. Соосное расположение собранных вместе промежуточной детали, упругой прокладки и детали, осуществляющей на нижнем манипуляторе наклоны вправо-влево торса (трусов экзоскелета) относительно торса
46. Трусы экзоскелета, промежуточная деталь, упругая прокладка и часть нижнего манипулятора
47. Условный шестереночный мультипликатор, предназначенный для увеличения угла поворота с целью увеличения чувствительности датчика поворота - исходное положение
48. Условный шестереночный мультипликатор после поворота шестерен
49. Условный фрикционный ременной мультипликатор, предназначенный для увеличения угла поворота с целью увеличения чувствительности датчика поворота - исходное положение
50. Условный фрикционный ременной мультипликатор после поворота шкивов
51. Дополнительный датчик наклонов таза в стороны плеч на оси Q-О' нижнего манипулятора
52. Возможность дополнительного перемещения нижнего манипулятора вверх-вниз вдоль оси G-G' на вертикальной дуге - показано максимальное смещение вверх
53. Показано смещение нижнего манипулятора вниз на вертикальной дуге
54. Пазы с помощью, которых нижний манипулятор смещается вверх-вниз
55. Вертикальная дуга с направляющей, предназначенной для смещения нижнего манипулятора вверх-вниз
56. Аксонометрический вид на вертикальную дугу
57. Повороты верхней части тела (грудного отдела) относительно таза вокруг вертикальной линии
58. Внутреннее кольцо механизма подвеса, заспинная дуга, стержень поддерживающий грудной отдел экзоскелета со стороны спины, верхняя часть экзоскелета (грудной отдел - жесткий жилет и шлем)
59. Вертикальная ось вращения, расположенная на спине жесткого жилета, небольшие повороты жесткого жилета вокруг которой, позволяют определять направление силовых воздействий, оказываемых человеком для поворота грудного отдела экзоскелета вокруг вертикальной оси
60. Расположение упорной плиты на стержне, предназначенном для подвеса грудного отдела экзоскелета
61. Расположение упругих прокладок и датчиков давления между упорной плитой и жестким жилетом грудного отдела экзоскелета
62. Набор деталей (в разобранном виде), предназначенных для организации работы датчиков, определяющие повороты грудного отдела экзоскелета вокруг вертикальной линии
63. Изображение в собранном виде комплекта деталей, предназначенных для организации работы датчиков, определяющие повороты грудного отдела экзоскелета вокруг вертикальной линии
64. Результат работы датчиков, определяющих направление силовых воздействий человека-оператора, направленных на поворот грудного отдела экзоскелета вокруг вертикальной линии, - принудительный поворот вертикальной дуги, а вместе с ней нижнего манипулятора и штанов экзоскелета вокруг вертикальной линии
65. Для качественного управления манипуляторами робота в копирующем режиме необходимо соблюдать для человека и для тождество пропорций отрезков между глазами и кистями
66. Максимальная длина шеи человека в условиях, когда позвонки шеи, выстроенные в прямую линию
67. Позвонки шеи жирафа, выстроенные в прямую линию - длина шеи жирафа максимальна
68. Шея жирафа согнутая дугой - расстояние меду основанием шеи и основанием черепа жирафа уменьшилось
69. S-образный изгиб шеи лошади - в данном случае расстояние между основанием шеи и основанием черепа короче, чем если бы позвонки шеи были выстроены в прямую линию
70. Максимальные угловые амплитуды наклона человеком головы вперед назад
71. Максимальные угловые амплитуды при наклонах человеком головы в стороны плеч
72. Демонстрация максимальной длины шеи при углах D и С равных 90°
73. Возможность смещения глаз-камер в голове робота
74. Полная схема головного манипулятора
75. Упрощенная схема головного манипулятора для расчета значений углов u, V, О и А.
76. Упрощенная схема для расчета угла В, если его величина больше 180°
77. Упрощенная схема для расчета угла В, если его величина меньше или равна 180°
78. Блок-схема расчетного алгоритма для вычисления значений углов О, А, В - часть, отвечающая за вычисление угла V
79. Блок-схема расчетного алгоритма для вычисления значений углов О, А, В - часть, отвечающая за вычисление углов О и А
80. Блок-схема расчетного алгоритма для вычисления значений углов О, А, В - часть, отвечающая за вычисление угла В
81. Демонстрация использования улучшенной подвижности бедренных суставах и шлема в механизме подвеса с эффектом гальванической вестибулярной стимуляции
82. Аксонометрический вид на механизм подвеса с эффектом гальванической вестибулярной стимуляции
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ принудительной угловой ориентации головы и таза человека-оператора в механизме подвеса, применяемого для дистанционного управления антропоморфным роботом | 2019 |
|
RU2743952C2 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| СПОСОБ КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2724769C1 |
| Способ распределенной защиты человека-оператора от ударных перегрузок | 2015 |
|
RU2620703C2 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ С ПОМОЩЬЮ КОНТРОЛЛЕРОВ И ШЛЕМА ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2019 |
|
RU2718240C1 |
| СИСТЕМА ЗАЩИТЫ ГОЛОВЫ, ШЕЙНОГО И ВЕРХНЕ-ГРУДНОГО ОТДЕЛОВ ПОЗВОНОЧНОГО СТОЛБА ОПЕРАТОРА И/ИЛИ ПАССАЖИРА ТРАНСПОРТНОГО СРЕДСТВА, ОТНОСИТЕЛЬНО НЕПОДВИЖНО ЗАФИКСИРОВАННОГО ТУЛОВИЩЕМ В НЕМ (ВАРИАНТЫ) | 2000 |
|
RU2196059C2 |
| УСТРОЙСТВО ДЛЯ СИДЕНИЯ | 2002 |
|
RU2199258C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |













































































Изобретение относится к области робототехники и может быть использовано для дистанционного управления в копирующем режиме антропоморфным роботом-аватаром. Экзоскелет содержит механизм подвеса с вертикальной дугой и стержнем, шлем, выполненный с возможностью размещения на голове оператора, жесткий жилет, выполненный с возможностью размещения на грудном отделе оператора, трусы и управляющее устройство, связанное с датчиками для определения силовых воздействий таза оператора на внутреннюю поверхность трусов, при этом шлем связан с жилетом посредством головного манипулятора, жилет закреплен с возможностью поворота вокруг вертикальной оси на стержне механизма подвеса, а трусы посредством нижнего манипулятора, выполненного с возможностью задания наклонов трусов, связаны с вертикальной дугой механизма подвеса, причем упомянутые манипуляторы соответствующим образом связаны с управляющим устройством. При этом трусы выполнены эластичными спереди и жесткими сзади, датчики наклонов трусов распложены на задней части трусов, а датчик поворота грудного отдела экзоскелета вокруг вертикальной линии расположен на спине жесткого жилета. Управляющее устройство учитывает эффект укорачивания шеи оператора при совершении им наклонов головы. Использование изобретения позволяет улучшить подвижность элементов экзоскелета и повысить точность передачи копирующих движений. 82 ил.
Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом, содержащий гироскопический механизм подвеса человека-оператора с вертикальной дугой и стержнем, шлем, выполненный с возможностью размещения на голове человека-оператора, жесткий жилет, выполненный с возможностью размещения на грудном отделе человека-оператора, трусы и управляющее устройство, связанное с датчиками для определения силовых воздействий таза человека-оператора на внутреннюю поверхность трусов, при этом шлем связан с жилетом посредством головного манипулятора, жилет закреплен с возможностью поворота вокруг вертикальной оси на стержне гироскопического механизма подвеса, а трусы посредством нижнего манипулятора, выполненного с возможностью задания наклонов трусов, связаны с вертикальной дугой гироскопического механизма подвеса, причем упомянутые манипуляторы соответствующим образом связаны с управляющим устройством, отличающийся тем, что он снабжен датчиками для определения силовых воздействий, вызывающих повороты трусов вокруг вертикальной оси жилета, которые установлены на спине жилета между жилетом и упомянутым стержнем и связаны с управляющим устройством, трусы выполнены полужесткими, передняя часть которых выполнена из эластичного деформируемого вещества, а задняя часть выполнена из жесткого вещества, при этом упомянутые датчики для определения силовых воздействий таза оператора размещены на задней жесткой части трусов между трусами и нижним манипулятором, причем все упомянутые датчики содержат эластичные деформируемые прокладки, а управляющее устройство выполнено с возможностью учета при управлении упомянутыми манипуляторами укорочения шеи и тела человека-оператора при совершении им наклонов головы относительно торса и наклонов торса относительно таза.
| КОМПЛЕКС УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2018 |
|
RU2710290C1 |
| КОМПЛЕКС КОПИРУЮЩЕГО УПРАВЛЕНИЯ МАНИПУЛЯТОРАМИ АНТРОПОМОРФНОГО РОБОТА | 2019 |
|
RU2725930C1 |
| КОМПЛЕКС ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2019 |
|
RU2724775C1 |
| RU 2019100888 A, 16.07.2020 | |||
| US 2003223844 A1, 04.12.2003 | |||
| WO 2017200593 A1, 23.11.2017. | |||

