Изобретение относится к медицинской технике, а именно к средствам для определения реальных и допустимых параметров чувствительности вестибулярных протезов, их тестирования и моделирования на базе полученных данных нагрузок на вестибулярный анализатор при проектировании вестибулярных протезов, а также для проведения нейрофизиологических экспериментов.
В настоящее время широко разрабатываются прототипы вестибулярных протезов и других микросенсорных систем для нужд персональной навигации лиц пожилого возраста и лиц с вестибулярными нарушениями, являющимися результатами наследственного заболевания, воздействия вирусов, применения антибиотиков, химиотерапии, следствием инсульта или травмы головы. Протезы, как правило, содержат микросхему управления, аккумулятор и датчики движения, аналогичные полукружным каналам и отолитовым органам внутреннего уха [1]. Сигналы, вырабатываемые протезом, передаются через имплантированные во внутреннее ухо пациента электроды на вестибулярные нервные окончания. Таким образом, вестибулярный протез заменяет работу поврежденного вестибулярного аппарата, создавая у пациента ощущение движения. Заключительным этапом перед выпуском в эксплуатацию этих изделий являются клинические испытания.
Для снижения участия человека в испытаниях, предполагающих возможную некомфортность и дополнительные нагрузки на вестибулярный анализатор испытателя, предпочтительно перед клиническими проводить и предклинические испытания, без участия пациента.
Известно устройство для измерения статокинетических раздражений [2], предназначенное для оценки функционального состояния вестибулярного анализатора и определения реальных и максимально допустимых нагрузок статокинетического характера. Устройство включает систему датчиков ускорений, размещенных в трех взаимно перпендикулярных плоскостях, и блок накопления информации. Получаемая с датчиков информация дает представление о воздействии линейных и угловых ускорений в соответствующих плоскостях. Устройство в некоторой степени моделирует работу вестибулярного анализатора человека, однако оно не пригодно для достижения целей, сформулированных выше.
Известна система для представления виртуального пространства пользователю [3], в которой имеется узел подвижной сферической платформы, имеющий шесть степеней свободы, внутри которой размещен пользователь, средство определения положения платформы и компьютеризированный блок обработки информации. Нашлемный дисплей подстраивает отображаемое пользователю изображение виртуальной реальности в соответствии с полученной информацией о перемещениях платформы с пользователем. Система отслеживает и имитирует вертикальное положение пользователя, однако степень достоверности моделирования низка, к тому же система не предназначена для использования без человека.
Наиболее близким к изобретению является устройство, представленное в [4]. Это устройство имитирует вертикальную позу человека с помощью перевернутого маятника, установленного на подвижной тележке и управляемого по показаниям от датчиков углов, угловых скоростей и угловых ускорений посредством блока обработки информации и программного управления. Перевернутый маятник представляет собой стержень, зафиксированный относительно тележки с возможностью колебаний в продольно-вертикальной плоскости. Тележка способна перемещаться поступательно по горизонтальной плоскости под действием управляющей силы. Перевернутый маятник предназначен для решения задачи стабилизации его вертикального положения и рассматривается в качестве имитатора тела человека. Однако указанное устройство имеет одну степень свободы, что не дает полного представления о вертикальной позе стоящего человека, и не использует информацию с вестибулярного аппарата, необходимую для сохранения вертикальной позы в экстремальных ситуациях, например для предотвращения падения.
Задачей данного изобретения является создание устройства, имитирующего вертикальную позу человека в движении для разработки и тестирования вестибулярного протеза и позволяющего преодолеть недостатки, присущие вышеуказанным известным решениям.
Достигаемый технический результат заключается в повышении корректности и точности проводимых измерений и исследований за счет использования антропоморфной схемы перевернутого маятника на подвижном основании и микроэлектромеханической системы (МЭМС) вестибулярной функции, имитирующей функционирование вестибулярного аппарата в экстремальных условиях падения.
Указанный результат достигается тем, что в мобильном имитаторе вертикальной позы (МИВП) для разработки и тестирования вестибулярных протезов, содержащем укрепленный на подвижном основании перевернутый маятник, снабженный датчиками углов и угловых скоростей, и блок обработки информации и программного управления, перевернутый маятник выполнен многозвенным и антропоморфным с тремя степенями свободы, в узлах которого установлены электромоторы и датчики углов и угловых скоростей, на верхнем звене маятника расположена платформа, выполненная с возможностью размещения на ней тестируемого прототипа вестибулярного протеза и препарированного вестибулярного аппарата животного для идентификации динамических параметров вестибулярной функции или микроэлектромеханической системы (МЭМС) вестибулярной функции, при этом датчики углов и угловых скоростей перевернутого маятника и блок управления электромоторами связаны каналами беспроводной связи с блоком обработки информации и программного управления, выполненным с возможностью приема по каналам беспроводной связи выходных сигналов микроэлектромеханической системы вестибулярной функции, сенсоров препарированного вестибулярного аппарата животного и тестируемого прототипа вестибулярного протеза.
Кроме того, антропоморфный маятник имеет пять звеньев, включающих два параллельных звена нижнего уровня, связанных через узлы в виде цилиндрических шарниров, с нижней платформой и соответствующими двумя параллельными звеньями среднего уровня, связанными, в свою очередь, через общий узел с верхним звеном, и выполнен с возможностью угловых перемещений в продольной плоскости.
Также подвижное основание представляет собой «бегущую» дорожку, на котором установлена нижняя платформа.
Предпочтительно, чтобы датчики углов и угловых скоростей были выполнены в виде потенциометра и тахометра, связанных с соответствующим электромотором.
Указанный выше результат также достигается тем, что микроэлектромеханическая система (МЭМС) вестибулярной функции включает акселерометр и гироскоп, последовательно подключенные через блок динамики волосковых клеток к блоку активности первичных нейронов.
МИВП, имитирующий вертикальную позу человека в экстремальных условиях возможного падения в сагиттальной плоскости, необходим для:
1. Идентификации параметров и совершенствование компьютерных моделей сенсорных систем вестибулярного аппарата.
2. Разработки, испытания и тестирования прототипов вестибулярного протеза.
3. Разработки, испытания и тестирования прототипов МЭМС персональной навигации пациента.
Изобретение поясняется чертежами, на которых представлены:
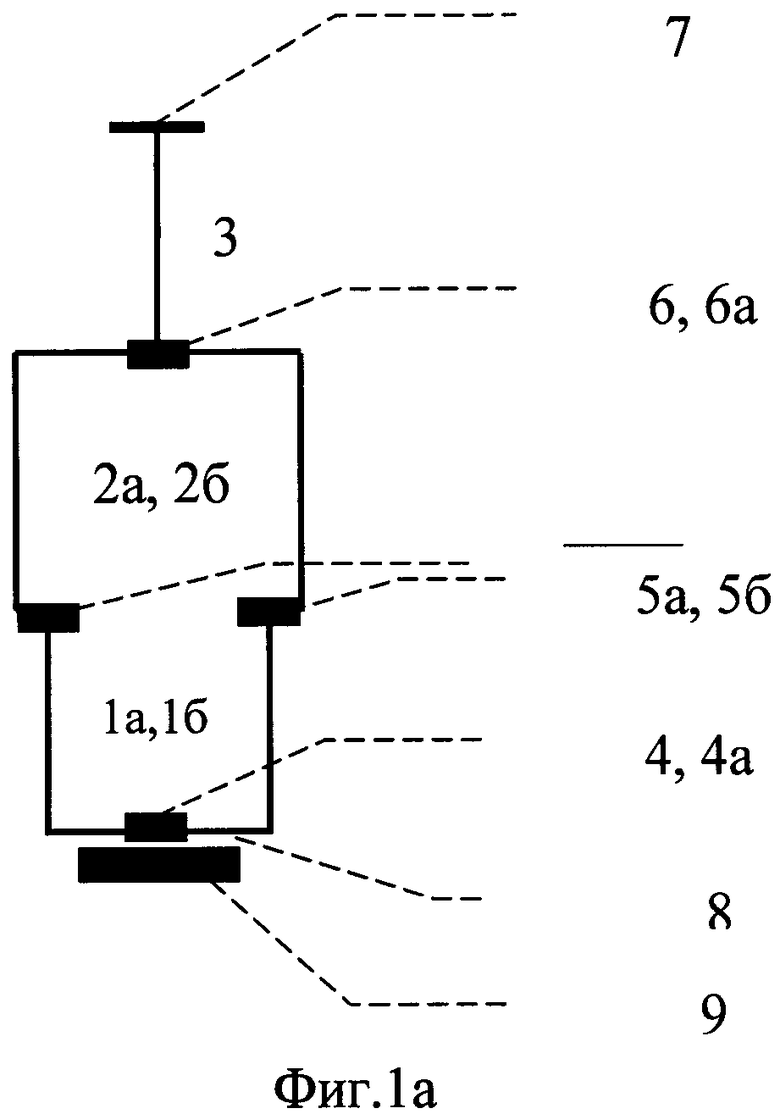
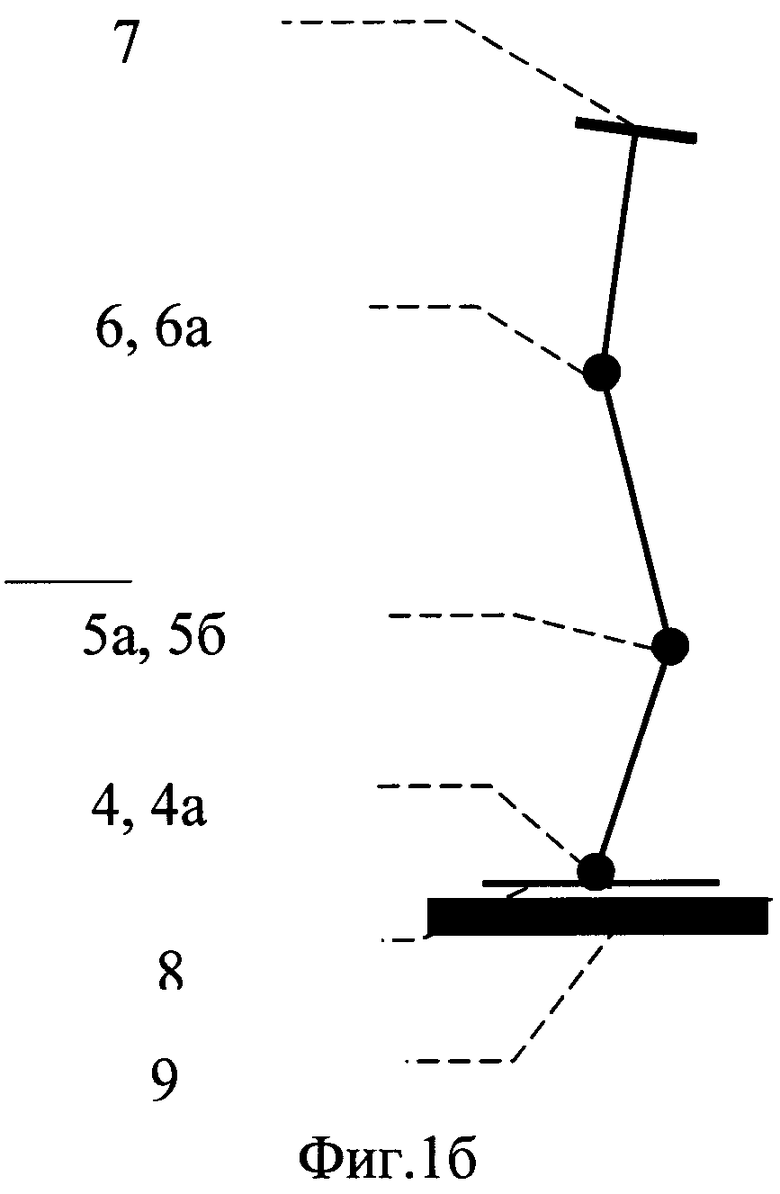
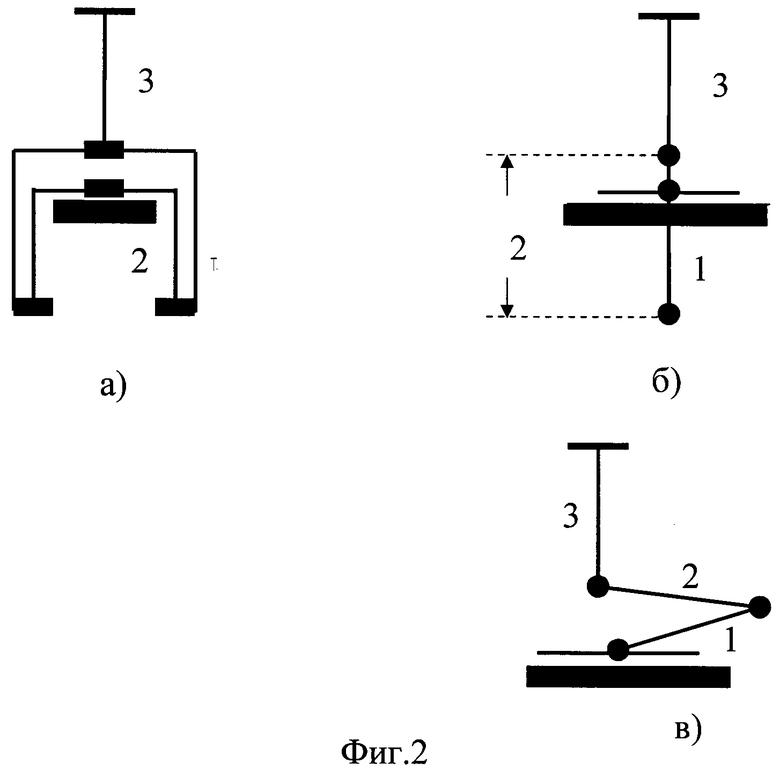
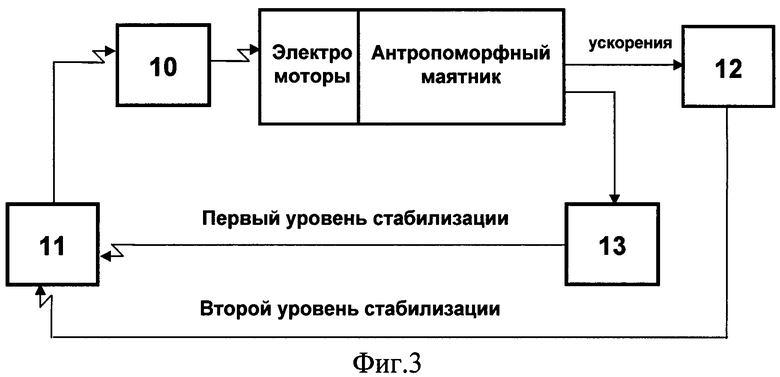
на фиг.1 - схематическое изображение антропоморфного перевернутого маятника, а) Вид спереди, б) Вид сбоку; на фиг.2 - схематическое изображение маятника для вариантов мягкой остановки, а) Вид спереди, б) Вид сбоку, в) Второй вариант вида сбоку; на фиг.3 - обобщенная блок-схема МИВП; на фиг.4 - блок-схема МЭМС вестибулярной функции.
На фиг.la, б схематически изображен антропоморфный перевернутый маятник, состоящий из пяти звеньев в виде стержней. Два параллельных стержня нижнего уровня 1а и 1б соединены цилиндрическим шарниром 4, имитирующим голеностопный сустав с нижней поддерживающей маятник платформой 8, установленной на подвижном основании 9, в качестве которого может использоваться «бегущая» дорожка для создания дополнительных возмущающих механических стимулов. Два параллельных стержня (звена) среднего уровня 2а и 2б соединены цилиндрическими шарнирами, имитирующими коленные суставы, с соответствующими стержнями нижнего уровня 1а и 1б и общим цилиндрическим шарниром 6, имитирующим тазобедренные суставы, с верхним стержнем 3, на котором ортогонально верхнему стержню жестко установлена платформа 7.
В узлах маятника, представляющих собой цилиндрические шарниры, установлены электромоторы, снабженные соответствующими датчиками углов и угловых скоростей 13 (фиг.3). Для пятизвенного маятника электромоторы установлены в четырех узлах (1 нижний электромотор 4а, два средних электромотора 5а и 5б и 1 верхний электромотор 6а), каждый из которых электрически связан с соответствующим потенциометром и тахометром 13. Управление электромоторами осуществляется через блок управления двигателями 10, получающий управляющий сигнал по каналу беспроводной связи от блока обработки информации и программного управления 11. В свою очередь, сигналы датчиков 13 в узлах маятника также поступают по каналам беспроводной связи на блок 11, в состав которого входит компьютер с соответствующей периферией, обеспечивающей беспроводную связь с блоками устройства и элементами, размещенными на верхней платформе.
МИВП реализует четыре режима функционирования:
I - Имитация первого этапа неуправляемого падения (потери вертикального положения) при неподвижной нижней платформе.
II - Имитация стояния (стабилизации вертикального положения) при малых начальных возмущениях (нормальная ситуация).
III - Имитация стабилизации вертикального положения при постоянно действующих возмущениях, создаваемых подвижной нижней платформой (экстремальная ситуация).
IV - Мягкая остановка МИВП (фиг.2.). Этот режим обеспечивает сохранность объектов, расположенных на верхней платформе МИВП, после реализации основных режимов I-III.
В соответствии с перечисленными режимами на верхней платформе 7 для разработки и испытания вестибулярных протезов располагаются:
- в режиме имитации потери вертикального положения (I) - препарированный вестибулярный аппарат животного (или его часть) (на чертежах не показан) для проведения экспериментов с целью идентификации динамических параметров математической модели вестибулярной функции, используемой при разработке прототипа вестибулярного протеза, либо тестируемый прототип вестибулярного протеза.
- в режимах стабилизации вертикального положения (II и III) на верхней платформе размещается МЭМС 12 вестибулярной функции. Эта микроэлектромеханическая система содержит акселерометр 16 и гироскоп 17 (фиг.4), имитирующие реакцию отолитовых органов и вертикальных полукружных каналов на механический стимул, и компьютерную модель вестибулярной функции (блоки динамики волосковых клеток 18 и активности первичных нейронов 19), формирующую выходную информацию как первичную с волосковых клеток (в виде функции выходного напряжения V1), так и вторичную с первичных нейронов (в виде функции выходного напряжения V2), для реализации двух задач: а) формирования второго уровня стабилизации вертикального положения антропоморфного маятника по данным об изменении мембранного потенциала волосковых клеток - стабилизации по ускорениям; б) сравнительного анализа выходных сигналов с первичных нейронов с выходными сигналами с вестибулярного протеза или его прототипа.
МЭМС связана с блоком 11 по каналу беспроводной связи. В качестве МЭМС, размещенной на платформе, могут использоваться интегрированные устройства, объединяющие в себе механические и электрические электронные компоненты, в частности, применяемые в медицине [6, 7].
- при всех режимах стабилизации вертикальной позы (II или III) на верхней платформе располагается прототип вестибулярного протеза (на чертежах не показан). В качестве прототипа вестибулярного протеза могут использоваться системы, разработанные в Университете Калифорнии, США [5].
МЭМС 12, сенсоры препарированного вестибулярного аппарата и прототип вестибулярного протеза связаны с блоком 11 каналами беспроводной связи.
Устройство МИВП работает следующим образом.
В режиме (I) имитации падения кажущееся ускорение, которое имеет место в расчетной точке вестибулярного аппарата человека при его падении, воспроизводится в расчетной точке верхней платформы 7, где расположен прототип вестибулярного протеза. При этом угловое ускорение верхней платформы таково, что выходная информация с полукружного канала препарированного вестибулярного аппарата животного аналогична выходной информации соответствующего полукружного канала вестибулярного аппарата человека при падении. То есть происходит имитация углового ускорения по выходной информации. Таким образом, этот режим позволяет имитировать начало падения (первые 20-200 мс), вызванного спотыканием, толчком, проскальзыванием и т.д. Это дает возможность тестировать выходной сигнал с расположенного на верхней платформе имитатора 7 прототипа вестибулярного протеза на первом этапе падения путем его сравнения с полученным при этом же движении МИВП сигналом с препарированного вестибулярного аппарата, расположенного также на верхней платформе имитатора. Выходная информация как с протеза, так и с препарированного вестибулярного аппарата подается по беспроводной связи на блок 11, что позволяет сделать сравнительный анализ в постобработке и по результатам сравнения дать оценку качества функционирования протеза. Движение МИВП для воспроизведения требуемого стимула, то есть кажущегося и углового ускорения расчетной точки верхней платформы, осуществляется с помощью четырех электромоторов, на которые подаются через блок управления двигателями 10 необходимые управляющие сигналы с блока управления 11. Эти управляющие сигналы просчитываются и задаются в блоке управления заранее. В данном режиме функционирования система стабилизации не участвует, а моторы используются лишь для воссоздания необходимого стимула.
Работа МИВП по реализации режимов имитации стабилизации вертикальной позы (II и III) существенно отличается от реализации режима (I), так как в этих режимах функционируют два уровня системы управления, а четыре электромотора используются для стабилизации МИВП. Первый уровень стабилизации работает по показаниям датчиков углов и угловых скоростей 13, входящих в состав электромоторов. Второй уровень использует первичную выходную информацию V1 с МЭМС вестибулярной функции (фиг.4). На основе обработанной по заданным алгоритмам информации с двух уровней стабилизации формируются управляющие сигналы на электромоторы, обеспечивающие стабилизацию вертикальной позы имитатора.
При этом ответом на возникающее кажущееся и угловое ускорение верхней платформы МИВП является вторичная выходная информация V2 с МЭМС вестибулярной функции и выходной сигнал прототипа вестибулярного протеза, расположенного на верхней платформе МИВП. Эти выходные сигналы подаются по беспроводной связи на компьютер, где происходит их сравнительный анализ, по результатам которого можно будет дать оценку качества функционирования тестируемого протеза.
В режиме имитации стояния (II) нижняя платформа неподвижна, и рассматриваются лишь мгновенные возмущения, дестабилизирующие перевернутый антропоморфный маятник, в виде начальных отклонений по углам и/или угловым скоростям.
Режим имитации стабилизации в экстремальной ситуации (III) реализуется при помощи подвижной нижней платформы 4 с помощью «бегущей» дорожки 9, что дает возможность протестировать прототип вестибулярного протеза в условиях, когда создается постоянно действующая возмущающая сила (сила инерции), провоцирующая дестабилизацию вертикальной позы.
Режим (IV) мягкой остановки МИВП обеспечивает сохранность объектов, расположенных на верхней платформе МИВП после реализации основных режимов I-III.
При этом возможны различные варианты законов остановки МИВП. Главное, чтобы удар в момент остановки был минимальным. Время реализации данного режима не ограничено. При этом возможна остановка антропоморфного маятника, которая не соответствует движениям реального человека. Например, возможно прокручивание нижних звеньев МИВП (1а, 1б) относительно оси, проходящей через нижний электромотор 4, соответствующий голеностопному суставу (фиг.2, а)-б)). Или же возможна более реальная остановка МИВП (фиг.2, в)), аналогичная приседанию человека.
Выбор того или иного закона зависит от возможностей моторов и от начальных для режима "мягкой остановки" положений, скоростей и ускорений звеньев МИВП в момент окончания основных режимов I-III.
Также возможна различная комбинация режимов (I-IV).
Кроме того, возможно использовать МИВП для идентификации параметров и совершенствования компьютерных моделей сенсорных систем вестибулярного аппарата. Вестибулярный стимул, то есть кажущееся или угловое ускорение, которое имеет место в расчетной точке вестибулярного аппарата человека при его движении, например при его падении, воспроизводится в расчетной точке верхней платформы МИВП, где расположен препарированный вестибулярный аппарат животного или его часть. Одновременно рассматриваемый вестибулярный стимул является входом для компьютерной модели сенсорных систем вестибулярного аппарата.
Управляющие сигналы на электромоторы для создания необходимых вестибулярных стимулов просчитываются и задаются в блоке управления заранее. При этом снимается выходная информация (первичная или вторичная) с препарированного вестибулярного аппарата животного, расположенного на верхней платформе МИВП. Эта информация подается на компьютер и используется для сравнительного анализа с аналогичными данными компьютерного эксперимента. По результатам сравнения возможно производить идентификацию и корректировку параметров компьютерной модели.
Источники информации
1. J.Liu, A.M.Shkel "System Design and Experimental Evaluation of a MEMS based Semicircular Canal Prosthesis", Proceedings of the 1st International IEEE EMBS Conference on Neural Engineering Capri Island, Italy, March 20-22, 2003.
2. RU 2008056, 28.02.1994.
3. US 5490784 A, 13.02.1996.
4. A Feedback Model Reproduces Muscle Activity During Human Postural Responses to Support-Surface Translations. Torrence D.J. Welch and Lena H. Ting. Journal of Neurophysiology 99, 2007, p.1032-1038, fig. 1-3.
5. J. Liu and A.M. Shkel, "An Electronic Prosthesis Mimicking the Dynamic Vestibular Function", 2003 IEEE Sensors Conference, vol.2, pp.996-1001.
6. CN 1948969, 2007.
7. В.Я.Распопов. Микроэлектромеханические системы. Датчики и системы. №3, 2005, с.17-21.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ КОРРЕКЦИИ УСТАНОВКИ ВЗОРА ЧЕЛОВЕКА ПРИ ВИЗУАЛЬНОМ УПРАВЛЕНИИ ДВИЖЕНИЕМ В УСЛОВИЯХ МИКРОГРАВИТАЦИИ | 2012 |
|
RU2500375C1 |
| Способ получения информации о психофизиологическом состоянии человека | 2015 |
|
RU2629247C2 |
| Способ трекинга гибкого хирургического инструмента на основе инерциальных МЭМС датчиков | 2021 |
|
RU2767174C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЕДЕНИЯ ДИАЛОГОВ С ВИРТУАЛЬНЫМИ ПЕРСОНАЖАМИ В ВИРТУАЛЬНОЙ СРЕДЕ | 2020 |
|
RU2747861C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ДИФФЕРЕНЦИАЛЬНЫМ ПОЗИЦИОНИРОВАНИЕМ НА ОСНОВЕ СЕТИ CORS | 2017 |
|
RU2704614C1 |
| МИКРОЭЛЕКТРОМЕХАНИЧЕСКИЙ ДАТЧИК МАГНИТНОГО ПОЛЯ | 2012 |
|
RU2490754C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА В ПРОСТРАНСТВЕ | 2016 |
|
RU2626755C1 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |
| СПОСОБ ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ ПОЛЕЙ ЗРЕНИЯ ПРИБОРОВ НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ ВОЕННЫХ ГУСЕНИЧНЫХ И КОЛЕСНЫХ МАШИН | 2020 |
|
RU2796212C2 |
| СПОСОБ ДЛЯ ВЫЯВЛЕНИЯ АСИММЕТРИЙ ДВИЖЕНИЙ | 2017 |
|
RU2654600C1 |

Изобретение относится к медицинской технике, а именно к средствам для определения реальных и допустимых параметров чувствительности вестибулярных протезов, их тестирования и моделирования на базе полученных данных нагрузок на вестибулярный анализатор при проектировании вестибулярных протезов, а также для проведения нейрофизиологических экспериментов. Мобильный имитатор содержит укрепленный на подвижном основании перевернутый маятник, снабженный датчиками углов и угловых скоростей, и блок обработки информации и программного управления, при этом перевернутый маятник выполнен многозвенным и антропоморфным с тремя степенями свободы, в узлах которого установлены электромоторы и датчики углов и угловых скоростей. На верхнем звене маятника расположена платформа, на которой размещаются в зависимости от режима работы: тестируемый прототип вестибулярного протеза, препарированный вестибулярный аппарат животного для идентификации динамических параметров вестибулярной функции или микроэлектромеханическая система вестибулярной функции. Датчики углов и угловых скоростей перевернутого маятника и блок управления электромоторами связаны каналами беспроводной связи с блоком обработки информации и программного управления, выполненным с возможностью приема по каналам беспроводной связи выходных сигналов микроэлектромеханической системы вестибулярной функции, сенсоров препарированного вестибулярного аппарата животного и тестируемого прототипа вестибулярного протеза. Использование изобретения позволяет повысить корректность и точность проводимых измерений и исследований. 4 з.п. ф-лы, 4 ил.
1. Мобильный имитатор вертикальной позы для разработки и тестирования вестибулярных протезов, содержащий укрепленный на подвижном основании перевернутый маятник, снабженный датчиками углов и угловых скоростей, и блок обработки информации и программного управления, отличающийся тем, что перевернутый маятник выполнен многозвенным и антропоморфным с тремя степенями свободы, в узлах которого установлены электромоторы и датчики углов и угловых скоростей, на верхнем звене маятника расположена платформа, выполненная с возможностью размещения на ней тестируемого прототипа вестибулярного протеза и препарированного вестибулярного аппарата животного для идентификации динамических параметров вестибулярной функции или микроэлектромеханической системы вестибулярной функции, при этом датчики углов и угловых скоростей перевернутого маятника и блок управления электромоторами связаны каналами беспроводной связи с блоком обработки информации и программного управления, выполненным с возможностью приема по каналам беспроводной связи выходных сигналов микроэлектромеханической системы вестибулярной функции, сенсоров препарированного вестибулярного аппарата животного и тестируемого прототипа вестибулярного протеза.
2. Мобильный имитатор по п.1, отличающийся тем, что антропоморфный маятник имеет пять звеньев, включающих два параллельных звена нижнего уровня, связанных через узлы в виде цилиндрических шарниров, с нижней платформой и соответствующими двумя параллельными звеньями среднего уровня, связанными в свою очередь через общий узел с верхним звеном, и выполнен с возможностью угловых перемещений в продольной плоскости.
3. Мобильный имитатор по п.1 или 2, отличающийся тем, что подвижное основание представляет собой «бегущую» дорожку, на котором установлена нижняя платформа.
4. Мобильный имитатор по п.2, отличающийся тем, что датчики углов и угловых скоростей выполнены в виде потенциометра и тахометра, связанных с соответствующим электромотором.
5. Мобильный имитатор по п.2, отличающийся тем, что микроэлектромеханическая система вестибулярной функции включает акселерометр и гироскоп, последовательно подключенные через блок динамики волосковых клеток к блоку активности первичных нейронов, с возможностью формирования первичной выходной информации с волосковых клеток в виде функции выходного напряжения V1 и вторичной выходной информации с первичных нейронов в виде функции выходного напряжения V2.
| US 2005240253 A1, 27.10.2005 | |||
| US 5490784 A, 13.02.1996 | |||
| US 2005267549 A1, 01.12.2005 | |||
| US 2004123661 A1, 01.07.2004 | |||
| US 2005062754 A2, 14.07.2005 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТОКИНЕТИЧЕСКИХ РАЗДРАЖЕНИЙ | 1990 |
|
RU2008056C1 |
| Устройство для оценки вестибулярной сенсорной системы | 1985 |
|
SU1258380A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Optimal sensorimotor transformations for balance | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

