Комплекс автоматизированного учета вагонооборота (КАУ-В) предназначен для применения на объектах железной дороги, на предприятиях, структурных подразделениях, использующих железнодорожное сообщение, в рамках технологического процесса которых необходима достоверная информация о пребывающих и отправляемых поездах.
Использование автоматизированных комплексов с возможностью распознавания номеров вагонов необходимо для решения актуальных для предприятий железнодорожного транспорта задач, поскольку номера подвижного состава содержат в себе важнейшую информацию для внутренних и межгосударственных перевозочных процессов. Номера вагонов позволяют осуществлять мониторинг продвижения грузов, поиск «потерянных» транспортных единиц и представляют собой общее средство коммуникации между предприятиями.
Известна система автоматического контроля положения подвижных объектов, содержащая не менее одной кодовой пластины, выполненной со световозвращающими кодовыми штрихами, и блок считывания информации, выполненный в виде последовательно расположенных на оптической оси источника направленного излучения, блока сканирования и светоделителя, а также фотоприемника, оптически сопряженного со светоделителем и подключенного к блоку обработки, отличающаяся тем, что она снабжена дополнительным фотоприемником, расположенным в плоскости сканирования, кодовые штрихи на каждой кодовой пластине расположены столбцами и выполнены шириной, соответствующей нулю или единице двоичного кода, а блок обработки выполнен в виде последовательно соединенных блока определения значений кодовых штрихов, первый вход которого соединен с выходом фотоприемника, блока распознавания кодов цифр, блока коррекции, регистра, оперативно-запоминающего устройства и блока сопряжения, а также блока управления, соответствующие выходы которого подключены к управляющим входам блока считывания информации, регистра, оперативно-запоминающего устройства и блока сопряжения, и формирователя сигналов начала и конца считывания, вход которого соединен с вторым выходом блока определения значений кодовых штрихов, а выход - с соответствующим входом блока управления, при этом выход дополнительного фотоприемника соединен с вторыми входами блока определения значений кодовых штрихов блока распознавания кодов цифр и блока коррекции (патент на изобретение №2007693, дата публикации 15.02.1994, МПК5 G01C 22/00, B61L 25/00, "Система автоматического контроля положения подвижных объектов").
К недостаткам известной системы относится необходимость оснащения всего вагонного парка дополнительным оборудованием идентификации вагонов, а именно, кодовыми пластинами. Такая унификация обозначений вагонов представляет собой значительную практическую проблему, когда вагонный парк проходящих контролируемых вагонов принадлежит различным собственникам, как государственным, так и частным, и часть вагонов, не оснащенная такими кодовыми пластинами, остается неидентифицированной.
Известна также система автоматической идентификации для двухпутных участков железных дорог, состоящая из множества кодовых бортовых датчиков и, как минимум, одного пункта считывания, который содержит антенны, подключенные к выходам антенного коммутатора, управляющий вход которого подключен к первому выходу блока управления, при этом сигнальный вход антенного коммутатора подключен к двунаправленному выводу циркулятора, выход которого соединен с первым входом приемника, второй вход и выход которого соединены соответственно со вторым выходом и первым входом блока управления, третий выход и второй вход которого соединены соответственно с первым входом и первым выходом передатчика, второй выход которого соединен со входом циркулятора, а двунаправленный вывод блока управления соединен с первым двунаправленным выводом модема, второй двунаправленный вывод которого соединен с сетью передачи данных, отличающаяся тем, что система содержит четыре антенны, расположенные по две с внешних сторон каждого пути двухпутного участка дороги, подключенные к первому, второму, третьему и четвертому выходам антенного коммутатора, и четыре счетчика осей, расположенных по одному перед каждой антенной на ближайшем к ней пути, и соединенных своими выходами с третьим, четвертым, пятым и шестым входами блока управления, к седьмому входу и четвертому выходам которого подключены первый выход и первый вход блока обработки сигнала, второй вход которого соединен со вторым выходом приемника, а второй выход соединен со входом модема (патент на изобретение RU 2314955, дата публикации 20.01.2008, МПК B61L 25/02, «Система автоматической идентификации для двухпутных участков железных дорог»]. Использование известной системы невозможно без использования элементов идентификации, устанавливаемых на бортах вагонов, в частности, наличия множества кодовых бортовых датчиков. В связи с тем, что часть вагонов может быть не оборудована такими кодовыми датчиками, либо они пришли в негодность, либо оказались удаленными с бортов вагонов, нарушается процесс учета вагонооборота, резко снижается эффективность процесса учета грузоперевозок.
Кроме того, данная система автоматической идентификации требует протяженности ее размещения на максимально возможную длину состава, расстояние между антеннами, установленными с одной стороны пути, должно быть больше максимально допустимой длины состава, проходящего через данный участок пути.
Задача, на решение которой направлено заявляемое техническое решение, заключается в повышении эффективности комплекса автоматизированного учета вагонооборота (КАУ-В) путем обеспечения универсальности его применения, высокой достоверности распознавания инвентарных номеров вагонов, при обеспечении высоких скоростей прохождения составов через точки считывания номеров вагонов, а также обеспечения интеграции комплекса с АСУ предприятия.
Поставленная задача решается благодаря тому, что комплекс автоматизированного учета вагонооборота (КАУ-В) на предприятии содержит систему считывания номеров вагонов, систему обработки и передачи считываемых данных; систему распознавания номеров вагонов; систему централизованного сбора, передачи и долговременного хранения данных; автоматизированное рабочее место (АРМ) администратора, при этом система считывания номеров вагонов содержит, по крайней мере, одну точку считывания, выполненную в виде двух опор, установленных по обе стороны от контролируемого железнодорожного пути, на которые монтируются блок оптической регистрации, снабженный телекамерами, и осветительный блок, образованный светодиодными светильниками, а также содержащий датчиковую подсистему позиционирования вагона, состоящую из датчиков, размещенных на опорах, и магнитных датчиков, размещенных на одном рельсе по разные стороны от оси, соединяющей противоположные телекамеры; система обработки и передачи считываемых данных связана с системой считывания номеров вагонов, снабжена локальным сервером и содержит размещенные в контейнере контроллер, модуль локальной передачи данных и модуль удаленной передачи данных; система распознавания номеров вагонов связана с системой обработки и передачи считываемых данных и на каждой из точек считывания содержит видеосервер, программные модули счета вагонов, видеозахвата, распознавания номеров вагонов, оперативный архив видеоданных и архив составов; система централизованного сбора, передачи и долговременного хранения данных представляет собой центральный пост, содержащий долговременное хранилище данных, состоящее из накопительных модулей, программный модуль ведения баз данных и центральный сервер управления, связанный с системами считывания, распознавания через сеть Ethernet и снабженный программным модулем интеграции с АСУ предприятия; автоматизированное рабочее место (АРМ) администратора содержит программный модуль мониторинга состояния комплекса (КАУ-В) и программный модуль управления системой считывания.
Комплекс автоматизированного учета вагонооборота (КАУ-В) обеспечивает получение, обработку и хранение изображения подвижных единиц в составах поездов, следующих в любом направлении, и осуществляет автоматическое считывание и распознавание инвентарных номеров вагонов с последующей передачей обработанных данных в инфраструктурную сеть соответствующего подразделения предприятия.
Работа КАУ-В, основанная на оптическом считывании инвентарных номеров, нанесенных на поверхность вагонов, цистерн, платформ, обеспечивает универсальность применения комплекса для подвижных единиц всех участников перевозочного процесса на железных дорогах как внутри страны, так и для межгосударственных перевозок, при этом для идентификации подвижного состава нет необходимости в трудоемком и сложном процессе оснащения вагонного парка дополнительным оборудованием идентификации вагонов, например радиочастотными метками, которые могут быть повреждены или умышленно демонтированы.
Одновременно, исключение из процесса считывания номеров вагонов использования ручного списывания номеров оператором, позволяет существенно повысить эффективность работы персонала предприятия к снизить число сотрудников, задействованных в процессе обработки поездов.
Использование оптической системы считывания, взаимодействующей с системой распознавания номеров вагонов, обеспечивает значительное повышение скорости приема и отправления поездов, возможность параллельного приема и отправления поездов за счет одновременного считывания с нескольких путей, а также обеспечивает считывание номеров вагонов, находящихся в статическом положении, например, при их коммерческом осмотре, взвешивании, загрузке - разгрузке.
Система обработки и передачи считываемых данных обеспечивает бесперебойную круглосуточную автоматизацию процесса сбора и регистрации данных о подвижных единицах при любых метеорологических условиях, кроме экстремальных, резко ухудшающих видимость, и также обеспечивает одновременную обработку и передачу информации с нескольких путей.
Централизованный сбор и хранение информации осуществляется при помощи надежной системы сбора, передачи и долговременного хранения данных, рассчитанной на обеспечение архивирование информации о всех прошедших через точки считывания поездах на длительные сроки.
Важнейшую роль в повышении эффективности работы КАУ-В играет наличие интеграционной связи центрального сервера управления с АСУ предприятия, благодаря которой осуществляется мониторинг продвижения грузов, поиск потерянных транспортных единиц, а также осуществляется общая коммуникация центрального поста с операторами инфраструктуры предприятия, государственными органами.
Развитые возможности интеграции позволяют эффективно применять КАУ-В вне зависимости от того, какая система управления установлена на предприятии, КАУ-В является масштабируемым комплексом и обладает возможностью его использования на собственных предприятиях любой конфигурации, в том числе на входных и выходных участках путей сортировочных железнодорожных станций. Интеграционные возможности комплекса позволяют обеспечивать контроль за прохождением подвижных единиц - вагонов и локомотивов, - через границы подъездных путей коммерческихиредприятий или через границы зон ответственности различных предприятий железных дорог, например, станции и локомотивного депо.
Наличие в КАУ-В АРМа администратора обеспечивает дистанционное выполнение мониторинга, контроля и настройки всех систем комплекса, при его установке и в процессе эксплуатации.
Наличие отличительных признаков в заявляемом техническом решении позволяет сделать вывод о его соответствии условию патентоспособности «новизна».
Существенные признаки заявляемого комплекса, предопределяющие получение указанных технических результатов, явным образом не следуют из уровня техники, что позволяет сделать вывод о соответствии технического решения условию патентоспособности «изобретательский уровень».
Условие патентоспособности «промышленная применимость» подтверждено на примере конкретного осуществления.
Сущность рассматриваемого технического решения поясняется представленными техническими рисунками и фотографиями, где
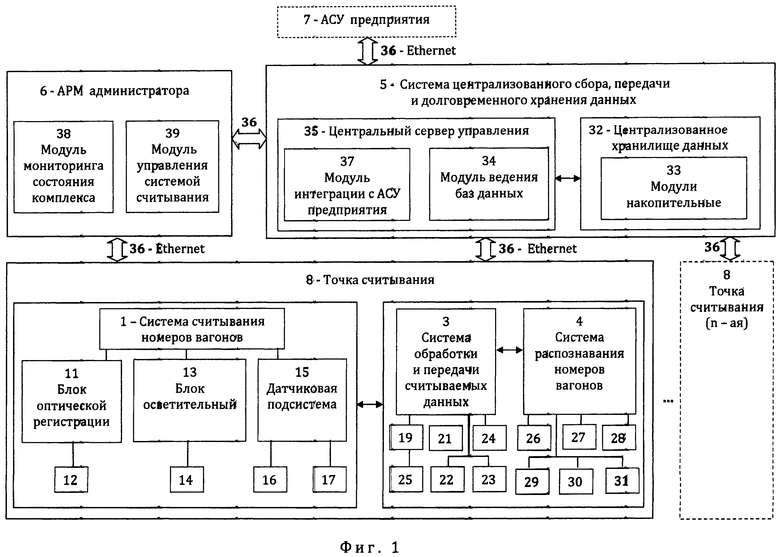
на фиг.1 - изображена структурная схема комплекса автоматизированного учета вагонооборота;
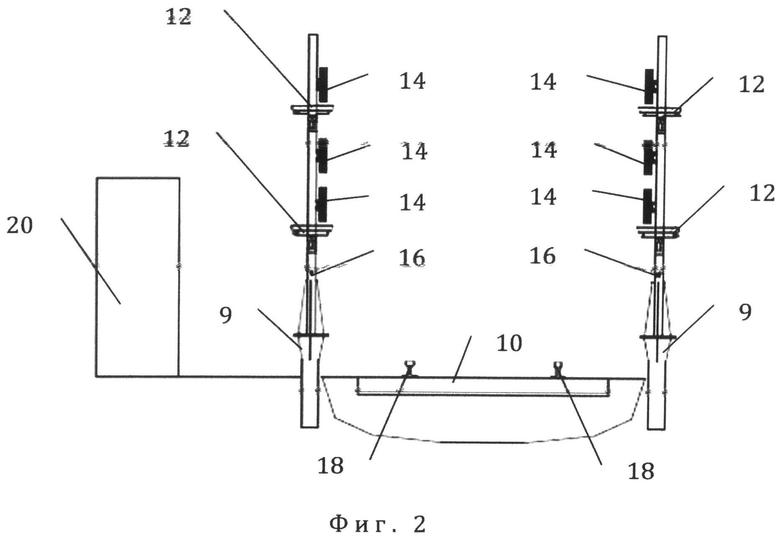
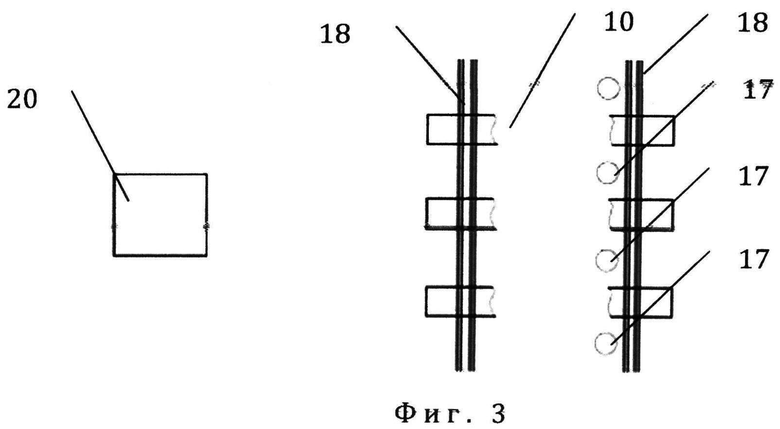
на фиг.2 и фиг.3 - общая схема размещения оборудования в точке считывания, вид спереди и вид сверху соответственно;
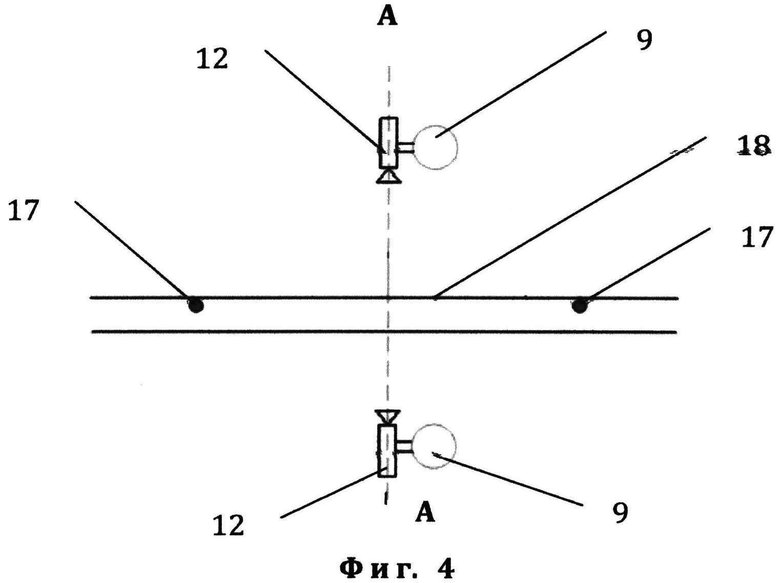
на фиг.4 - схема размещения магнитных датчиков, на одном рельсе;
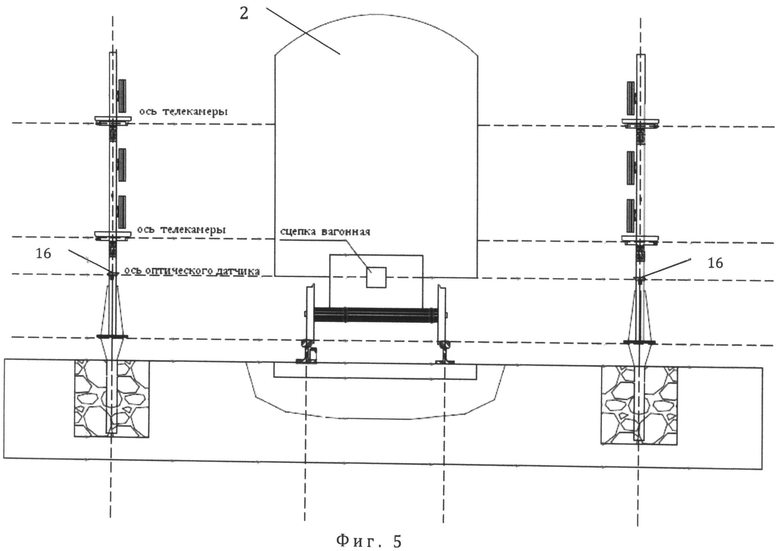
на фиг.5 - схема размещения двухпозиционного оптического датчика, на уровне оси сцепки вагонной;
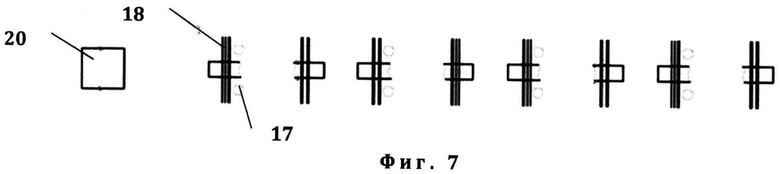
на фиг.6 и фиг.7 - представлен вариант размещения оборудования точек считывания для многопутного участка железной дороги, вид спереди и сверху соответственно;
на фиг.8 - фотография контейнера;
на фиг.9 - фотография центрального поста;
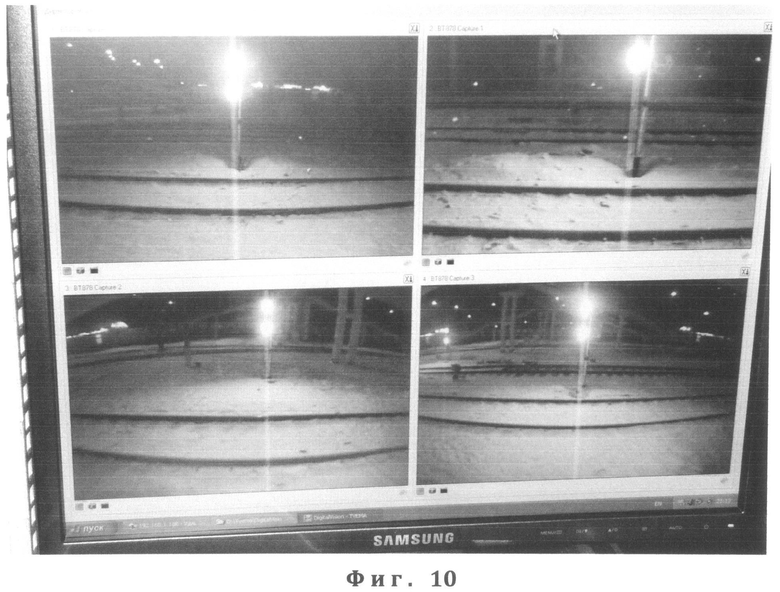
на фиг.10 - просмотр изображения контролируемого участка пути с четырех телекамер одновременно.
Комплекс автоматизированного учета вагонооборота (КАУ-В) размещают в зоне осмотра подвижного состава железнодорожной станции или другого предприятия, использующего железнодорожный транспорт. Место установки комплекса определяется технологическими условиями работы железнодорожной станции и габаритом приближения строений. КАУ-В может быть использован для работы с вагонами, цистернами или открытыми платформами.
Комплекс автоматизированного учета вагонооборота (КАУ-В) на предприятии содержит систему 1 (фиг.1) считывания номеров вагонов 2, систему 3 обработки и передачи считываемых данных; систему 4 распознавания номеров вагонов 2; систему 5 централизованного сбора, передачи и долговременного хранения данных; автоматизированное рабочее место 6 (АРМ) администратора, автоматизированную систему управления 7 (АСУ) предприятия.
Система 1 считывания номеров вагонов 2 содержит, по крайней мере, одну точку 8 считывания, выполненную в виде двух опор 9 (фиг.2, 3), установленных по обе стороны от контролируемого железнодорожного пути 10, на которые монтируют блок 11 оптической регистрации, снабженный телекамерами 12, и осветительный блок 13, образованный светодиодными светильниками 14.
При этом инвентарные номера, нанесенные на вагоны, должны соответствовать требованиям, предъявляемым к знакам и надписям на вагонах грузового парка железных дорог. Степень загрязнения, виды загрязнения номера вагона не приводят к нечитаемости номера.
Скорость прохождения состава через точку считывания 8 может составлять для пассажирских поездов до 200 км в час, считывание номеров вагонов товарных составов или цистерн осуществляется при скорости их движения до 60 км/час. Кроме того, КАУ-В позволяет осуществлять считывание номеров вагонов в их статическом положении, необходимом, например, при взвешивании вагонов, при их загрузке или разгрузке.
В представленном варианте исполнения блок 11 оптической регистрации состоит из четырех телекамер 12, размещенных в термокожухах и установленных попарно на опорах 9 с двух сторон от контролируемого состава.
Осветительный блок 13 состоит в данном случае из шести светодиодных светильников 14, размещенных на опорах 9.
Кроме того, система 1 считывания номеров вагонов 2 содержит датчиковую подсистему 15 позиционирования вагона 2, состоящую из датчиков 16, размещенных на опорах, и магнитных датчиков 17, размещенных на одном рельсе 18 по разные стороны от оси А-А (фиг.4), соединяющей противоположные телекамеры 12. Датчики 16 (фиг.2), размещенные на опорах 9, могут быть выполнены в виде одно- или двухпозиционных оптических датчиков, размещенных на противоположных опорах 9 по обе стороны от контролируемого пути 10, или, например, могут быть выполнены в виде радарных датчиков.
Двухпозиционный оптический датчик 16 (фиг.5) состоит из излучателя и приемника, размещенных на противоположных опорах 9 на уровне оси сцепки вагонов 2 проходящих по железнодорожному пути 10 составов.
Система 3 обработки и передачи считываемых данных (фиг.1) связана с системой 1 считывания номеров вагонов 2, снабжена локальным сервером 19 и содержит размещенные в контейнере 20 (фиг.8), контроллер 21, модуль 22 локальной передачи данных, модуль 23 удаленной передачи данных, а также коммутационную панель 24, и в данном варианте исполнения оснащена управляющей консолью 25.
Система 4 (фиг.1) распознавания номеров вагонов 2 связана с системой 3 обработки и передачи считываемых данных и на каждой из точек 8 считывания содержит видеосервер 26, программный модуль 27 счета вагонов, программный модуль 28 видеозахвата, программный модуль 29 распознавания номеров вагонов 2, оперативный архив 30 видеоданных и архив 31 составов. Программный модуль 29 распознавания номеров вагонов содержит, кроме того, вспомогательную программу дораспознавания для определения номеров, не распознанных в штатном режиме.
Локальный сервер 19 обладает процессором, мощность которого обеспечивает одновременное проведение текущего распознавания, в режиме реального времени, и решение задач, связанных с анализом архивных данных.
Система 5 централизованного сбора, передачи и долговременного хранения данных (фиг.1) представляет собой центральный пост (фиг.9), содержащий долговременное хранилище 32 данных, состоящее из накопительных модулей 33, программный модуль 34 ведения баз данных, входящий в центральный сервер 35 управления, связанный с системой 4 распознавания через локальную сеть 36 Ethernet (фиг.1) и снабженный программным модулем 37 интеграции с АСУ 7 предприятия.
Автоматизированное рабочее место 6 (АРМ) (фиг.1) администратора содержит программный модуль 38 мониторинга состояния комплекса (КАУ-В) и программный модуль 39 управления системой 1 считывания.
Система жизнеобеспечения локального сервера 19 и оборудования передачи считываемых данных, размещенных в термостабилизированном контейнере 20 (фиг.8), состоит из вентилятора, конвектора, электрического щита, коммутационного щита, стабилизатора напряжения, сетевого фильтра и системы пожаротушения (на фиг.не показаны).
КАУ-В может включать в себя одну или несколько точек считывания 8, в зависимости от поставленной на предприятии задачи. На опору 9, установленную на участке между железнодорожными путями 10, можно закрепить оборудование считывания, предназначенное для контроля путей, находящихся по обе стороны опоры 9, которая называется в таком случае двусторонней. При размещении КАУ-В на многопутном участке пути, с целью рационального использования оборудования, устанавливают двусторонние опоры и может быть установлен один контейнер, обслуживающий несколько опор (фиг.6, 7).
Блок оптической регистрации 11 точки считывания 8 состоит в данном случае из четырех телекамер 12, предназначенных для визуального контроля проходящих составов и выдачи видеосигналов на монитор (фиг.10).
Каждая из телекамер 12 установлена в термокожухе со встроенным обогревателем, который защищает телекамеры 12 от неблагоприятных воздействий окружающей среды, рабочий температурный диапазон выбирается в зависимости от климатической зоны, в которую устанавливается КАУ-В.
Для того чтобы комплекс выполнял одно из своих основных функциональных назначений - автоматическое распознавание номеров - блоки 11 оптической регистрации устанавливают и настраивают таким образом, что достигается минимальный уровень оптического искажения, обеспечивается достаточный обзор борта вагона 2 с необходимым перекрытием кадров нижней и верхней телекамер 12, обеспечивается достаточная ширина кадра, обеспечивается своевременная запись видеоизображения и корректная их обработка.
В связи с этим проводят как аппаратную настройку телекамер 12, так и настройку программного обеспечения для каждой телекамеры 12. Работа по установке и аппаратной настройке телекамер 12 ведут по следующим направлениям: размещение телекамер 12 относительно уровня головки рельса 18 и их положение в горизонтальной плоскости, настройку фокусного расстояния и фокусировку телекамер 12, настройку положения телекамер 12 в вертикальной плоскости, настройку горизонтальности кадра.
Входные данные, полученные от телекамер 12, организованы в виде потока графических данных, поступающих в дальнейшем в систему 4 распознавания номеров вагонов 2.
При наступлении условий недостаточной видимости для освещения железнодорожного состава, проходящего через точку считывания 8, предназначен блок 13 осветительный, входящий в состав системы 1 считывания номеров вагонов КАУ-В.
Автоматическое включение блока 13 осветительного при снижении естественной освещенности ниже порогового уровня осуществляет реле автоматического включения освещенности, взаимодействующее с датчиком освещенности (на фигурах не показаны), который формирует сигнал, соответствующий уровню освещенности. Для установки порогового уровня производится регулировка реле.
Для позиционирования вагона 2 во время движения состава через зону контроля точки считывания 8 используют смонтированные на рельсе 18 датчики 17 магнитные. По сигналам, поступающим с магнитных датчиков 17, определяются и фиксируются время прохождения каждого вагона 2 через точку считывания 8, а также направление движения и скорость состава. Для фиксации факта нахождения состава в точке считывания 8 используется оптический датчик 16, состоящий в данном случае из излучателя и приемника. Излучатель и приемник установлены на противоположно стоящих опорах 9 на уровне оси сцепки (фиг.5) проходящих по пути вагонов 2 (рис.2).
При монтаже датчика 16 важна точная ориентация излучателя на приемник (их соосность), при которой максимальное количество светового потока из излучателя должно попадать непосредственно в приемник. Если соосность установлена, то светодиод, находящийся на обратной стороне приемника, светится. В случае нахождения состава в точке считывания 8 световой луч, исходящий от излучателя к приемнику, всегда перекрыт вагоном 2 и светодиод на обратной стороне приемника гаснет, что обеспечивает возможность фиксации факта нахождения вагона 2 в зоне работы точки считывания.
Один контроллер 21 позволяет подключать до четырех датчиков 17 магнитных и до четырех комплектов оптических датчиков 16.
КАУ-В имеет два режима работы: «ожидание» - при отсутствии подвижных единиц (вагонов, цистерн, платформ) в точке считывания 8, и «работа» - при вступлении подвижных единиц в точку считывания.
При прохождении состава по железнодорожному пути 10 через точку считывания 8 на контроллер 21 поступает сигнал для начала работы. Контроллер 21 снимает сигналы с датчиков датчиковой подсистемы 15 позиционирования, передает в модуль 22 локальной передачи данных, в локальный сервер 19. Видеосигналы из блока 11 оптической регистрации передаются через коммутационную панель 24 и модуль 22 локальной передачи данных. С помощью управляющей консоли 25 осуществляют контроль за действиями оборудования и доступ к программному обеспечению точки считывания 8. Модуль 23 удаленной передачи данных передает выходные данные на центральный пост, в центральный сервер 35 управления.
В случае необходимости преобразования аналоговых сигналов, поступающих от системы 1 считывания, в цифровой видеопоток, функционирует блок обработки видеосигналов (на фигурах не показан).
Система 4 распознавания номеров вагонов 2 обрабатывает, хранит информацию, полученную с контролируемого железнодорожного пути 10, а также управляет полученными данными.
Программное обеспечение КАУ-В кроме автоматического режима, при котором программное обеспечение комплекса после приведения его в рабочее состояние непрерывно производит сбор и обработку данных, и при формировании результатов автоматически пересылает данные в АСУ 7 предприятия, дополнительно может имееть и ручной режим - с участием оператора.
Под управлением видеосервера 26 работают программный модуль 29 распознавания номеров вагонов 2, программный модуль 27 счета вагонов и наполняются хранилища данных.
Программный модуль 27 счета вагонов предназначен для обработки информации, исходящей от датчиковой подсистемы 15 через контроллер 21. В результате определяется факт проезда и время начала и окончания проезда каждого вагона через точку считывания 8.
Модуль 27 счета вагонов управляет записью программного модуля 28 видеозахвата и экспортом полученной видеоинформации в оперативный архив
30 видеоданных. Сигнал на начало работы программного модуля 27 счета вагонов выдается контроллером 21.
Видеосервер 26 осуществляет подробное протоколирование работы КАУ-В. Сообщения, выводящиеся в окно монитора АРМ администратора, позволяют просмотреть, на каком этапе в настоящий момент осуществляется работа комплекса. Видеосервер 26 запускает процесс репликации - копирование записанных фотоизображений считанных составов, видео вагонов, а также текстовой информации из архива 31 составов программного модуля 29 распознавания точки считывания 8 в централизованное долговременное хранилище 32 данных. Готовая к копированию информация выстраивается в очередь в порядке уменьшения приоритетов. Приоритетными в процессе копирования являются фото - и видеоизображения вагонов, по которым произведено частичное распознавание номеров либо по каким-либо причинам распознавание не произведено. Результаты копирования записываются в логи репликации. «Лог» - это текстовый файл, в котором каждому событию соответствует одна строка с временем и некоторыми дополнительными сведениями. Для удобства пользователей лог-файлы часто группируются по датам, что облегчает поиск необходимых сведений» («Энциклопедия хостинга», ).
Видеосервер 26 дает команду на передачу в АСУ 7 предприятия файла из архива 31 составов, содержащего список распознанных номеров.
В конфигурационных файлах видеосервера 26 осуществляют такие настройки как определение количества вагонов 2 в пакетах архива 31 составов, установка параметров автоматической очистки архива 31 составов, удаление локомотива из результирующего файла, содержащего список вагонов 2 и инвентарных номеров для всего состава и файлов, содержащих список номеров в формате, предназначенном для отправки в АСУ 7 предприятия, а также осуществляют установку времени начала-окончания естественного светового дня.
Устанавливает и меняет значения параметров настроек видеосервера 26 администратор программного обеспечения.
Программный модуль 27 счета вагонов по мере поступления данных с датчиков 17 магнитных начинает формировать список прошедших вагонов 2. Программный модуль 27 счета вагонов обрабатывает информацию, исходящую от датчиковой подсистемы 15, в результате чего определяется факт проезда и время начала и окончания проезда каждого вагона 2 через точку считывания 8; программный модуль счета 27 вагонов управляет записью программного модуля 28 видеозахвата и экспортом полученной видеоинформации в оперативный архив 30 видеоданных. Программный модуль видеозахвата 28 производит запись данных с телекамер 12 и формирует оперативный архив 30 видеоданных.
Программный модуль 28 видеозахвата записывает видео изображения составов в оперативный архив 30 видеоданных и обеспечивает их получение из оперативного архива 30 видеоданных, создаваемых на основании сведений о времени начала и окончания проезда вагонов 2; в результате создаются отдельные файлы с видеоизображениями проезда вагонов через точку 8 считывания для каждой телекамеры 12.
С началом формирования списков вагонов 2 запускается обработка записанных данных. Путем экспорта видео из оперативного архива 30 видеоданных формируют папку состава. Затем автоматически запускается программный модуль 29 распознавания, который, используя файлы папки состава, производит распознавание номеров.
В результате работы системы 4 распознавания номеров вагонов в папке состава записываются сведения о каждом вагоне 2 и о составе в целом.
Программный модуль распознавания 29 номеров вагонов 2 автоматически запускается в процессе создания программным модулем 28 видеозахвата видеофайлов каждой из телекамер 12 для каждого вагона 2 и производит распознавание номеров вагонов, используя указанные файлы. Результаты работы программного модуля 29 распознавания номеров записываются в архивные папки, по каждому пакету (один или несколько) вагонов; в папке состава находится также результирующий файл; расшифровка содержания файлов представлена в архиве 31 составов; для определения нераспознанных номеров используется дополнительная вспомогательная программа дораспознавания.
Оперативный архив 30 видеоданных предназначен для кратковременного хранения видеоинформации, записанной телекамерами 12 при срабатывании магнитных датчиков 17 позиционирования.
Архив 31 составов хранит в папках составов собранные и обработанные сведения о пройденных составах на рабочем диске локального сервера 19. Каждая папка составов имеет свой уникальный номер, в ней группируются пакеты вагонов. В папке составов также находятся файлы, содержащие сведения о составе в целом: список распознанных номеров в формате, предназначенном для отправки в АСУ 7 предприятия; результирующий файл, содержащий список вагонов, порядковые номера и инвентарные номера для всего состава; файл с данными о зафиксированном поясном времени начала и завершения прохождения каждого вагона через точку считывания 8.
Имя пакета означает порядковые номера вагонов, диапазон номеров, сведения по которым находятся в данном пакете. Количество вагонов в пакете может быть изменено в настройках видеосервера 26.
При необходимости, по запросу оператора, сохраненные фото- или видеоизображения направляются в АСУ 7 предприятия. Список номеров вагонов отправляется в АСУ 7 предприятия каждый раз после окончания обработки данных по составу.
Видео по всему составу с каждой телекамеры 12 можно просмотреть в папке экспорт, также находящейся в папке составов.
Оперативный архив 30 видеоданных осуществляет автоматическую очистку данных по истечении заданного срока, например, по истечение трех суток для железнодорожной станции.
Центральный пост КАУ-В осуществляет сбор, передачу и долговременное хранение данных, предоставляет оператору возможность работы с пользовательским интерфейсом программной составляющей комплекса КАУ-В, а также организует информационное взаимодействие с внешними системами КАУ-В.
Централизованное долговременное хранилище 32 данных входит в состав оборудования центрального поста КАУ-В. Централизованное долговременное хранилище 32 данных состоит из накопительных модулей 33, которые используются в качестве запоминающих устройств и являются основными накопителями данных. Накопительные модули 33 обеспечивают в автоматическом режиме сохранение информации в случае выхода из строя одного из накопительных модулей 33 и ее восстановление на накопительном модуле, установленном на месте накопительного модуля, вышедшего из строя.
Накопительный модуль 33 долговременного централизованного хранилища 32 данных, объем которого, например, равен одному терабайту, имеет архив записанных данных, включая видеоизображения, который может содержать записи приблизительно для пяти тысяч поездов или трехсот тысяч вагонов. Объем хранилища данных зависит от скорости движения поездов, наличия остановок, кодека сжатия видео и в среднем может составлять примерно три мегабайта на один вагон.
Централизованное долговременное хранилище 32 данных использует центральный сервер 35 управления хранилищем данных, подключенный к системе 1 считывания через локальную сеть 36 ETHERNET. Наполнение централизованного долговременного хранилища 32 данных происходит под управлением видеосервера 26.
Программный модуль 37 интеграции с АСУ 7 предприятия, например, железнодорожной станции, предназначен для передачи выходных данных в систему АСУ 7 железнодорожной станции, передачи изображений по запросу, получения списков рассогласования, которые формируются программным обеспечением АСУ 7 железнодорожной станции при сравнении выходных результатов КАУ-В с натурными листами составов.
«Натурный лист - основной технологический документ, используемый для организации процесса обработки вагонопотоков на станциях железных дорог» («Инструкция по составлению натурного листа поезда»).
Сравнение номеров фактически поступивших вагонов с данными натурных листов помогает избежать ошибок при формировании составов, позволяет добиться ощутимой экономии времени и средств. Производится подсчет количества и выявление ошибочного месторасположения вагонов в составе, проверка соответствия номеров прибывающих и отправляемых вагонов данным натурных листов, выдача списков рассогласования.
Устанавливаемое на входном участке предприятия оборудование КАУ-В автоматически считывает номера вагонов поезда и по каналам сети передачи данных предоставляет эту информацию к учету в базе данных АСУ 7 предприятия. В случае несоответствия данных о фактически поступившем на станцию поезде его натурному листу разногласия будут учтены при составлении всех технологических операций. Это позволит предотвратить неверную обработку поезда и, как следствие, избежать лишних временных и материальных затрат.Для дополнительного контроля результатов операций по обработке поездов и во избежание отправки неверно сформированных поездов оборудование КАУ-В может быть также установлено за сортировочным парком на выходном участке предприятия.
АРМ 6 администратора содержит персональный компьютер, сетевое оборудование, позволяет конфигурировать и настраивать оборудование и модули программного обеспечения всего комплекса, а также предоставляет доступ к архивной информации о прошедших составах.
Программный модуль 38 мониторинга состояния комплекса обеспечивает удаленный контроль, диагностику, мониторинг комплекса КАУ-В, - обеспечивает просмотр текущего состояния всех систем комплекса, и осуществляет доступ в централизованное долговременное хранилище данных.
Программный модуль 39 управления системой считывания осуществляет контроль за оборудованием считывания и имеет возможность удаленной настройки программного обеспечения КАУ-В.
АРМ 6 администратора отображает информацию о зафиксированных проездах, просмотрах видеоизображений выбранных вагонов, предоставляет доступ к архивной информации о прошедших проездах.
Таким образом, КАУ-В обеспечивает эффективное ведение автоматической круглосуточной видеозаписи подвижного состава; автоматическое считывание и распознавание номеров вагонов с высокой точностью в любых метеорологических условиях; консолидацию данных о подвижном составе с системами контроля предприятия, требующими его статичного положения, а также обеспечивает возможность учета вагонооборота на скорости перемещения пассажирского состава до 200 км/час, а грузового состава - до 60 км /час.
Заявляемое изобретение представляет собой высокоэффективное законченное техническое решение, которое не требует использования идентификационных устройств и обеспечивает универсальность применения КАУ-В для всех участников железнодорожных перевозок, повышает эффективность его использования на предприятиях любого масштаба, осуществляет интеграционное взаимодействие с АСУ предприятия и внешними структурными подразделениями перевозочного процесса, благодаря чему повышается эффективность автоматизированного учета вагонооборота.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА МОНИТОРИНГА ПОДВИЖНОГО СОСТАВА | 2020 |
|
RU2744048C1 |
| Автоматизированная система контроля инвентарных номеров вагонов | 2018 |
|
RU2682126C1 |
| АВТОМАТИЧЕСКИЙ ИДЕНТИФИКАТОР НОМЕРА ВАГОНА | 2012 |
|
RU2508216C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ НОМЕРА ВАГОНА | 2013 |
|
RU2524806C1 |
| Способ автоматизированного учета вагонов и контейнеров в движущемся железнодорожном составе | 2022 |
|
RU2784230C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОММЕРЧЕСКОГО ОСМОТРА 3D КОНТРОЛЬ | 2019 |
|
RU2718769C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ИЗМЕРЕНИЙ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК И ВЫЯВЛЕНИЯ ВАГОНОВ С ОТРИЦАТЕЛЬНОЙ ДИНАМИКОЙ | 2015 |
|
RU2582761C1 |
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| ИНФОРМАЦИОННОЕ ВЗАИМОДЕЙСТВИЕ СИСТЕМ КОНТРОЛЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДВИЖНОГО СОСТАВА С ГРАФИКОМ ИСПОЛНЕННОГО ДВИЖЕНИЯ ЖЕЛЕЗНОЙ ДОРОГИ | 2008 |
|
RU2386562C1 |
| Способ управления технологическим процессом железнодорожной станции | 2020 |
|
RU2738779C1 |

Изобретение предназначено для применения на объектах железной дороги для получения информации о пребывающих и отправляемых поездах. Комплекс автоматизированного учета вагонооборота содержит систему считывания номеров вагонов; систему обработки и передачи данных; систему распознавания номеров вагонов; систему централизованного сбора, передачи и хранения данных; автоматизированное рабочее место (АРМ). Система считывания номеров вагонов выполнена в виде двух опор, установленных по обе стороны от контролируемого железнодорожного пути, на которые монтируются телекамеры и осветительный блок, а также датчики позиционирования вагона. Система обработки и передачи данных связана с системой считывания номеров вагонов, снабжена локальным сервером и содержит контроллер и модули передачи данных. Система распознавания номеров вагонов связана с системой обработки и передачи данных и на каждой из точек считывания содержит видеосервер, программные модули счета вагонов, видеозахвата, распознавания номеров вагонов, оперативный архив видеоданных и архив составов. Система сбора, передачи и хранения данных состоит из накопительных модулей и центрального сервера управления, связанного с системами считывания, распознавания через сеть Ethernet и снабженного программным модулем интеграции с предприятием. АРМ содержит программный модуль мониторинга состояния комплекса и программный модуль управления системой считывания. Решение направлено на повышение эффективности учета вагонооборота. 10 ил.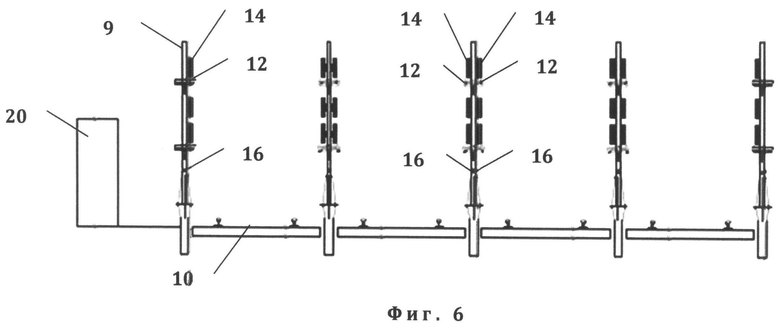
Комплекс автоматизированного учета вагонооборота (КАУ-В) на предприятии, характеризующийся тем, что он содержит систему считывания номеров вагонов, систему обработки и передачи считываемых данных; систему распознавания номеров вагонов; систему централизованного сбора, передачи и долговременного хранения данных; автоматизированное рабочее место (АРМ) администратора, при этом система считывания номеров вагонов содержит, по крайней мере, одну точку считывания, выполненную в виде двух опор, установленных по обе стороны от контролируемого железнодорожного пути, на которые монтируются блок оптической регистрации, снабженный телекамерами, и осветительный блок, образованный светодиодными светильниками, а также содержащий датчиковую подсистему позиционирования вагона, состоящую из датчиков, размещенных на опорах, и магнитных датчиков, размещенных на одном рельсе по разные стороны от оси, соединяющей противоположные телекамеры; система обработки и передачи считываемых данных связана с системой считывания номеров вагонов, снабжена локальным сервером и содержит размещенные в контейнере контроллер, модуль локальной передачи данных, модуль удаленной передачи данных; система распознавания номеров вагонов связана с системой обработки и передачи считываемых данных и на каждой из точек считывания содержит видеосервер, программные модули счета вагонов, видеозахвата, распознавания номеров вагонов, оперативный архив видеоданных и архив составов; система централизованного сбора, передачи и долговременного хранения данных представляет собой центральный пост, содержащий долговременное хранилище данных, состоящее из накопительных модулей, программный модуль ведения баз данных и центральный сервер управления, связанный с системами считывания, распознавания через сеть Ethernet и снабженный программным модулем интеграции с АСУ предприятия; автоматизированное рабочее место (АРМ) администратора содержит программный модуль мониторинга состояния комплекса (КАУ-В) и программный модуль управления системой считывания.
| СИСТЕМА АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1992 |
|
RU2007693C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ ДЛЯ ДВУХПУТНЫХ УЧАСТКОВ ЖЕЛЕЗНЫХ ДОРОГ | 2005 |
|
RU2314955C2 |
| УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ СМЕННОЙ ИНФОРМАЦИИ С ПОДВИЖНЫХ ОБЪЕКТОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 1991 |
|
RU2042551C1 |
| CN 102043977 A, 04.05.2011. | |||

