Изобретение относится к гидроакустике, а именно к устройствам обнаружения гидроакустических сигналов, определения пространственного направления их прихода в точку наблюдения на фоне изотропных и анизотропных акустических помех природного и техногенного происхождения и может быть использовано в радиолокации, радиосвязи и радиоастрономии.
Известны устройства для формирования направленных свойств пространственных фильтров (ПрФ), содержащие дискретную антенную решетку (ДАР) и тракт обработки выходных процессов электроакустических преобразователей (ЭАП), на основе оценки корреляционных функций выходных процессов (смеси сигнала с помехой или только помех) ЭАП, описанные в ряде работ, например, Смарышев М.Д. Направленность гидроакустических антенн. - Л: Судостроение, 1973, - с.56-58; Долгих В.Н., Казанцев Г.И. Прикладная гидрофизика. Часть 1. Гидроакустика. - Владивосток, МО РФ ТОВМИ, 2005, - с.405-407, 436-449.
Основным недостатком этих устройств является большое число нелинейных операций, равное I2-I (где I - число ЭАП в составе ДАР), которое необходимо проводить в процессе обработки выходных процессов ЭАП.
Этот недостаток устранен в другом известном устройстве для обнаружения и определения направления на источник акустических сигналов. Второй аналог содержит ДАР, состоящую из N ненаправленных акустических приемников размещенных в заданном объеме пространства произвольным образом, в том числе по случайному закону (CAP), а также N каналов передачи информации и корреляционный формирователь ХН с временной задержкой сигналов, включающий в себя линии задержки, сумматоры напряжений и мощности, корреляционный вычислитель и интегратор. (Патент №23107 (RU); МПК7 G01S 3/00; приоритет 16.11.2001 г. Устройство для определения направления на источник акустических сигналов / Долгих В.Н., Бородин А.Е. // Изобретения. Полезные модели: Оф. бюл. Роспатента. - М.: ФИПС, 20.05.2002. - №14).
В этом устройстве число нелинейных операций равно I+1. Несмотря на то, что число нелинейных операций уменьшилось по сравнению с предыдущим аналогом в I раз, при большом числе ЭАП в составе ДАР оно является еще достаточно большим. Это обусловливает достаточно высокие требования к объему и скорости обработки смеси сигналов и помех, производимых трактом обработки, содержащимся в обнаружителе сигналов.
Кроме того, рассмотренные аналоги не имеют в своем составе блоков принятия решения об обнаружении сигнала и вычисления порога принятия решения, функционально необходимых при решении задач обнаружения сигналов, подаваемых объектами, а также в аналогах не предусмотрены блоки измерения координат ЭАП относительно центра ДАР, что не позволяет решать задачу формирования отклика ПрФ в случае, когда координаты ЭАП изменяются под воздействием внешних факторов.
Два последних недостатка второго аналога устранены другим известным устройством, наиболее близким заявленному техническому решению и выбранным в качестве прототипа. «Устройство с корреляционным формирователем характеристики направленности для обнаружения сигналов и определения направления на их источник» содержит ДАР, состоящую из I=N+М элементов, и соответствующих им I каналов передачи информации, блок управления характеристиками направленности, блок вычисления относительных координат элементов ДАР и корреляционный формирователь характеристики направленности, состоящий из I линий временной задержки, сумматор напряжений, квадратор суммы напряжений, I квадраторов, сумматор мощностей, корреляционный вычислитель и интегратор. При этом соответствующие выходы I каналов передачи информации подключены к I входам блока вычисления относительных координат элементов ДАР и входам I линий временной задержки, выходы I линий временной задержки подключены к соответствующим входам сумматора напряжений и входам I квадраторов. Выход сумматора напряжений через квадратор суммы напряжений подключен к первому входу корреляционного вычислителя, к второму входу которого подключен выход сумматора мощности, к соответствующим входам которого подключены выходы I квадраторов. Выход блока вычисления относительных координат элементов ДАР соединен с первым входом блока управления характеристиками направленности, соответствующие выходы которого соединены с управляющими входами I линий временной задержки. Кроме того в состав устройства входят пороговое устройство, вычислитель порога принятия решения, блок управления активно-пассивными элементами ДАР и индикатор. Причем выход интегратора подключен к первому входу порогового устройства, второй вход которого соединен с выходом вычислителя порога принятия решения, а выход порогового устройства подключен к входу индикатора, выходы которого подключены к второму входу блока управления характеристиками направленности и входу вычислителя порога принятия решения. При этом блок управления активно-пассивными элементами ДАР через М каналов передачи информации последовательно подает команды на излучение измерительных гидроакустических сигналов каждым активно-пассивным элементом ДАР (Патент на изобретение №2305297; МПК G01S 3/802 (2006.01); приоритет 05 июля 2005. Устройство с корреляционным формирователем характеристики направленности для определения направления на их источник. Бородин А.Е., Долгих В.Н., Ламека А.П. // Изобретения. Полезные модели: Оф. бюл. Роспатента. - М.: ФИПС, 20.05.2007. - №14).
Основным недостатком прототипа является значительное число нелинейных операций: I+1, где I=N+М. Несмотря на то, что число нелинейных операций уменьшилось по сравнению с первым аналогом в 1 раз, оно является еще достаточно большим при большом числе ЭАП в составе ДАР. Это обусловливает достаточно высокие требования к объему и скорости обработки смеси сигналов и помех, производимых трактом обработки прототипа.
На устранение указанного недостатка направлено новое техническое решение «Корреляционный обнаружитель сигналов», технической задачей которого является создание нового корреляционного формирователя ХН для обнаружения сигналов и определения направления на их источник, позволяющего существенно уменьшить число нелинейных операций в тракте обработки корреляционного обнаружителя сигналов на фоне естественных и искусственных помех. Заявленное устройство позволяет примерно в k раз сократить число нелинейных операций. Число k может изменяться в пределах I≥k>1, или (N+М)≥k>1.
Реализация поставленной задачи позволяет достичь:
1. Уменьшения числа квадраторов в составе корреляционного тракта обработки, что существенно упрощает конструкцию обнаружителя.
2. Снижения требований к средствам обработки процессов при сохранении эффективности решения задач обнаружителем.
3. Повышения быстродействия тракта обнаружения и пеленгования объектов.
Указанный технический результат достигается тем, что заявленное устройство «Корреляционный обнаружитель сигналов»,содержит дискретную антенную решетку (ДАР), включающую свободно дрейфующие N ненаправленные пассивные и М активно-пассивные элементы и соответствующие им I, равные N+M, каналы передачи выходных процессов ЭАП ДАР, блок управления характеристиками направленности, блок вычисления относительных координат элементов ДАР. Устройство содержит также корреляционный формирователь характеристик направленности с временной задержкой сигналов, включающий I цифровых сдвигающих устройств, сумматор напряжений, квадратор суммы напряжений, соответствующих квадраторов, подключенных к соответствующим входам сумматора квадрированных процессов, корреляционного вычислителя и интегратора. Перечисленные блоки связаны между собой электрическими связями следующим образом:
- соответствующие выходы I каналов передачи выходных процессов ЭАП ДАР подключены к I входам блока вычисления относительных координат элементов ДАР и входам I цифровых сдвигающих устройств, выходы которых подключены к соответствующим I входам сумматора напряжений и к соответствующим входам квадраторов;
- выход сумматора напряжений через квадратор суммы напряжений подключен к первому входу корреляционного вычислителя, выход которого подключен к входу интегратора, при этом выход интегратора подключен к первому входу порогового устройства, второй вход которого соединен с выходом вычислителя порога принятия решения;
- выход порогового устройства подключен к входу индикатора, выходы которого соответственно подключены к второму входу блока управления характеристиками направленности и к входу вычислителя порога принятия решения и далее к входу блока управления активно-пассивными элементами ДАР;
- выход блока вычисления относительных координат элементов ДАР соединен с первым входом блока управления характеристиками направленности, соответствующие I выходы которого соединены с управляющими входами I цифровых сдвигающих устройств.
Принципиальным отличием заявленного устройства от прототипа является то, что в корреляционном формирователе характеристики направленности с временной задержкой сигналов использовано I/k квадраторов, которые снабжены I/k соответствующими входами и I/k соответствующими выходами, подключенными к соответствующим I/k входам сумматора квадрированных процессов для суммирования в нем I/k квадрированных процессов, при I≥k>1, а между сумматором I/k квадрированных процессов и корреляционным вычислителем дополнительно установлен умножитель, вход которого подключен к выходу сумматора I/k квадрированных процессов, а выход умножителя подключен ко второму входу корреляционного вычислителя.
Такое взаимное расположение вышеперечисленных конструктивных элементов необходимо для достижения следующих технических эффектов:
1. Уменьшения числа нелинейных преобразований в тракте обработки до 
2. Упрощения конструкции корреляционного формирователя отклика (ХН) ПрФ при эффективности аналогичной эффективности прототипа и сохранении его основных функций:
- измерения с заданной погрешностью относительных координат всех акустических приемников, входящих в состав антенной решетки;
- исключения помех приему полезных сигналов при работе активно-пассивных преобразователей в режиме излучения измерительных посылок;
- регулирования величин компенсационных временных задержек сигнала в каждом канале на выходе ДАР в зависимости от взаимного пространственного расположения электроакустических преобразователей и заданного направления ХН;
- автоматического или автоматизированного (при участии оператора) принятие решения об обнаружении сигналов;
- определения направления на источник сигналов.
Дополнительным отличием является то, что N ненаправленных пассивных и М активно-пассивных элементов размещены с возможностью изменения координат элементов ДАР относительно центра ДАР под воздействием внешних факторов. Эта, отсутствующая в прототипе, особенность необходима для эксплуатации антенных систем, элементы которых закреплены на гибком каркасе, и не исключает возможность использования заявленного устройства в случае свободного дрейфа ЭАП ДАР.
Сущность изобретения поясняется чертежом:
Фиг.1. Корреляционный обнаружитель сигналов. Функциональная схема.
В состав устройства входят:
1. Пассивный элемент ДАР (свободно перемещающийся в пространстве ненаправленный акустический приемник, общее количество пассивных элементов в составе ДАР равно N).
2. Активно-пассивный элемент ДАР (свободно перемещающийся в пространстве ненаправленный акустический приемник с совмещенным ненаправленным акустическим излучателем, общее количество активно-пассивных элементов в составе ДАР равно М).
3. Канал передачи выходных процессов ЭАП ДАР (число каналов равно I=N+М).
4. Блок вычисления относительных координат элементов ДАР.
5. Блок управления ХН.
6. Корреляционный формирователь ХН с временной задержкой сигналов.
7. Цифровые сдвигающие устройства (линия временной задержки, общее количество линий задержек равно I=N+М).
8. Сумматор напряжений.
9. Квадратор суммы напряжений.
10. Квадратор (общее количество квадраторов равно I/k).
11. Сумматор I/k квадрированных процессов.
12. Умножитель (умножает выходной процесс сумматора I/k квадратированных процессов на величину k).
13. Корреляционный вычислитель.
14. Интегратор.
15. Пороговое устройство.
16. Вычислитель порога принятия решения.
17. Индикатор.
18. Блок управления активно-пассивными элементами ДАР.
Заявленное устройство содержит дискретную антенную решетку, состоящую из N пассивных элементов ДАР (1), и М активно-пассивных элементов ДАР (2), размещенных произвольным образом в заданном объеме пространства с возможностью изменения их координат в системе координат ДАР. Им соответствуют I=N+М каналов передачи выходных процессов ЭАП ДАР (3). Выходы этих каналов подключены к I=N+М входам блока вычисления относительных координат элементов ДАР (4) и входам I цифровых сдвигающих устройств (7) (линий временной задержки), выходы которых подключены к I входам сумматора напряжений (8) и входам I/k квадраторов (10). Выход сумматора напряжений (8) через квадратор суммы напряжений (9) подключен к первому входу корреляционного вычислителя (13). Ко второму входу корреляционного вычислителя (13) подключен выход умножителя (12), вход которого подключен к выходу сумматора I/k квадрированных процессов (11), к I/k входам которого подключены выходы I/k квадраторов (10). Выход корреляционного вычислителя (13) через интегратор (14) подключен к первому входу порогового устройства (15), второй вход которого соединен с выходом вычислителя порога принятия решения (16) об обнаружении сигнала или о наличии во входном процессе только помехи. Выход блока вычисления относительных координат элементов ДАР (4) соединен с первым входом блока управления ХН (5), I выходов которого соединены с управляющими входами I цифровых сдвигающих устройств (7) (линий временной задержки). Выход порогового устройства (15) подключен к входу индикатора (17), выходы которого подключены соответственно ко второму входу блока управления ХН (5) и входу вычислителя порога принятия решения (16) об обнаружении сигнала или наличии во входном процессе только помехи и входу блока управления активно пассивными элементами ДАР (18).
Устройство работает следующим образом.
N пассивных элементов ДАР (1), с заданными максимальными размерами ДАР, размещаются в заданном пространстве любым, известным в морской практике, способом или по случайному закону. М активно-пассивных элемента ДАР (2) устанавливаются в два (для плоских ДАР, координаты элементов которой определяются двумя координатами X, Y) или в три (для объемных ДАР, координаты элементов которой определяются тремя координатами X, Y, Z) угла разностороннего треугольника, с максимально возможными расстояниями между ними, ограничиваемые размерами ДАР. Предусмотрено два режима работы устройства: «Измерение координат элементов ДАР в системе координат ДАР» и «Обзор».
В первом режиме «Измерение координат элементов ДАР в системе координат ДАР» выполняется цикл измерения координат элементов ДАР относительно центра ДАР. Для этого по команде начала работы при завершении обзора пространства, формируемой в индикаторе (17), блок управления активно-пассивными элементами ДАР (18) через М каналов передачи информации (3) последовательно подает команды на излучение измерительных гидроакустических сигналов каждым активно-пассивным элементом ДАР (2).
Поступающая по каналам передачи выходных процессов ЭАП ДАР (3) информация от N пассивных элементов ДАР (1) и М активно-пассивных элементов ДАР (2) автоматически обрабатывается в блоке вычисления относительных координат элементов ДАР (4). Для этого в блоке вычисления относительных координат элементов ДАР (4) корреляционным способом последовательно измеряют времена распространения измерительных сигналов от активно-пассивных элементов ДАР (2), работающих в режиме излучения, до всех остальных элементов ДАР, работающих в пассивном режиме и рассчитывают координаты элементов путем решения уравнений окружности (для плоских ДАР) или сферических поверхностей (для объемных ДАР). В блоке управления ХН (5) измеренные относительные координаты преобразуются в число сдвигов отсчетов выборок выходных процессов из каналов передачи выходных процессов ЭАП ДАР (3) относительно друг друга.
В режиме «Обзор» принятые пассивными элементами ДАР (1) и активно пассивными элементами ДАР (2), работающими в пассивном режиме, акустические сигналы по соответствующим каналам передачи выходных процессов ЭАП ДАР (3), которые выполняют предварительное усиление, фильтрацию выходных процессов ЭАП и их преобразование в цифровую форму, передаются на входы I цифровых сдвигающих устройств (7) (линий временной задержки) корреляционного формирователя характеристики направленности с временной задержкой сигналов (6). В цифровых сдвигающих устройствах (7) устанавливаются величины сдвига оцифрованных выходных процессов каналов передачи информации, вычисленные блоком управления ХН (5), обеспечивающие настройку устройства на заданное пространственное направление с учетом относительных координат соответствующих элементов ДАР (1, 2). Оцифрованные значения процессов с выходов I цифровых сдвигающих устройств (7) поступают на соответствующие входы сумматора напряжений (8) и с выходов I/k цифровых сдвигающих устройствах (7) на входы соответствующих квадраторов (10). С выхода сумматора напряжений (8) значение мгновенной суммы I процессов поступает на квадратор суммы напряжений (9) и с его выхода значение суммарного напряжения поступает на первый вход корреляционного вычислителя (13). Выходные значения I/k квадраторов (10) поступают на соответствующие входы сумматора I/k квадрированных процессов (11). Выходной процесс сумматора I/k квадрированных процессов (11) умножается умножителем (12) на k и результат умножения поступает на второй вход корреляционного вычислителя (13). В корреляционном вычислителе (13) вычисляется мгновенное значение пространственной корреляции акустического процесса, приходящего с заданного направления, временное усреднение и нормировка которого выполняется в интеграторе (14).
Усредненное значение коэффициента пространственной корреляции акустического процесса сравнивается в пороговом устройстве (15) с порогом, вычисленным в вычислителе порога принятия решения (16) об обнаружении сигнала или помехи. Относительный порог принятия решения зависит от числа приемников в составе ДАР, ее пространственных размеров и объема усредняемой выборки и может быть определен как

где U0 - пороговое значение; σn - эффективное значение помехи; Blt - вероятность ложной тревоги; В - число функций взаимной корреляции между выходными процессами всех возможных пар приемников ДАР; ρn - средний в рабочей полосе частот и по апертуре ДАР пространственный коэффициент взаимной корреляции помех; К - объем усредняемой выборки (в случае использования аналоговых методов обработки, объем усредняемой выборки можно заменить временем интегрирования Т).
Необходимые исходные значения задаются оператором и поступают на вход вычислителя порога принятия решения (16) с первого выхода индикатора (17). Если выходной процесс интегратора (14) превышает величину относительного порога, то принимается решение об обнаружении сигнала и на выходе порогового устройства (15) появляется сигнал, отображаемый на индикаторе (17). Со второго выхода индикатора (17) на второй вход блока управления ХН (5) поступает значение заданного (или текущего) направления ХН. В результате происходит обнаружение сигнала и определяется направление на его источник. Устройство работает в режиме «Обзор» до истечения интервала времени, в течение которого осуществляется обзор пространства в заданном секторе пространственных углов. После завершения цикла обзора пространства со второго выхода индикатора (17) на вход блока управления активно-пассивными элементами ДАР (18) поступает команда на включение режима работы «Измерение координат элементов ДАР в системе координат ДАР».
Определение числа и номеров каналов цифровых сдвигающих устройств (7), выходные процессы которых возводятся в квадрат квадраторами (10), а затем суммируются сумматором I/k квадратированных процессов (11) и умножаются умножителем (12) на k, осуществляется следующим образом:
1. Число каналов К=I/k должно быть целым числом.
2. Выбор числа и номеров выходных каналов, цифровых сдвигающих устройств (7), должен осуществляться таким образом, чтобы результат умножения выходного процесса сумматора I/k квадратированных процессов (11) умножителем (12) не более чем на 1% отличался от результата суммирования квадратов всех выходных процессов цифровых сдвигающих устройств (7). В этом случае эффективность устройства не уменьшается по сравнению с прототипом.
Результаты имитационного моделирования показали, что для цилиндрических звукопрозрачных антенных решеток с четным числом ЭАП в составе ДАР величина k может быть выбрана равной 2.
Таким образом, технический результат изобретения заключается в создании нового устройства с корреляционным формирователем характеристики направленности, в котором число нелинейных операций равно 
Заявленное устройство промышленно применимо, так как при его изготовлении могут быть использованы широко распространенные устройства и компоненты, такие как: приемники акустических сигналов, аналоговые усилители и фильтры, аналого-цифровые преобразователи, цифровые устройства памяти с произвольным доступом, цифровые процессоры обработки процессов, выпускаемые серийно отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2012 |
|
RU2499276C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2013 |
|
RU2523095C1 |
| Устройство для обнаружения сигналов и определения направления на их источник | 2016 |
|
RU2617884C1 |
| УСТРОЙСТВО С КОРРЕЛЯЦИОННЫМ ФОРМИРОВАТЕЛЕМ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2005 |
|
RU2305297C2 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1998 |
|
RU2173468C2 |
| УСТРОЙСТВО ОЦЕНКИ ДЛЯ СЛЕДЯЩЕЙ СИСТЕМЫ | 2005 |
|
RU2304790C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1991 |
|
RU2106652C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ СИГНАЛОВ НАДВОДНОЙ ЦЕЛИ В МОНОИМПУЛЬСНОЙ РЛС | 2004 |
|
RU2278397C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2008 |
|
RU2378660C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
Использование: в радиолокации, радиосвязи и радиоастрономии. Сущность: корреляционный обнаружитель сигналов содержит выполненную определенным образом дискретную антенную решетку (ДАР), включающую N ненаправленных пассивных и М активно-пассивных электроакустических преобразователей, соответствующие им I каналы передачи информации, блок управления характеристикой направленности, блок вычисления относительных координат элементов ДАР, пороговое устройство, вычислитель порога принятия решения, индикатор, блок управления активно-пассивными элементами ДАР, а также корреляционный формирователь характеристик направленности с временной задержкой сигналов. В корреляционном формирователе характеристики направленности с временной задержкой сигналов использовано I/k квадраторов, выходы которых подсоединены к соответствующим I/k входам сумматора квадрированных процессов, при I≥k>1, а между сумматором I/k квадрированных процессов и корреляционным вычислителем дополнительно установлен умножитель, вход которого подключен к выходу сумматора I/k квадратированных процессов, а выход умножителя подключен ко второму входу корреляционного вычислителя. Технический результат: упрощение конструкции обнаружителя, повышение быстродействия тракта обнаружения и пеленгования объектов. 1 з.п. ф-лы, 1 ил.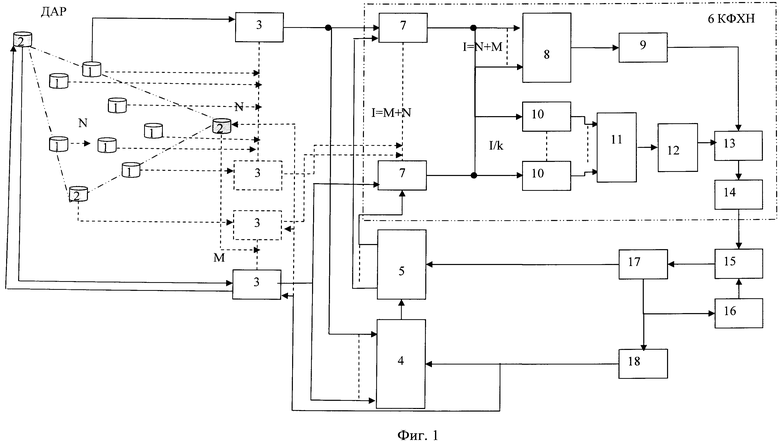
1. Корреляционный обнаружитель сигналов, содержащий дискретную антенную решетку (ДАР), включающую свободно дрейфующие N ненаправленные пассивные и М активно-пассивные элементы и соответствующие им I, равные N+M, каналы передачи выходных процессов ЭАП ДАР, блок управления характеристиками направленности, блок вычисления относительных координат элементов ДАР, а также корреляционный формирователь характеристик направленности с временной задержкой сигналов, содержащий I цифровых сдвигающих устройств, сумматор напряжений, квадратор суммы напряжений, соответствующие квадраторы, подключенные к соответствующим входам сумматора квадрированных процессов, корреляционный вычислитель и интегратор, при этом соответствующие выходы I каналов передачи выходных процессов ЭАП ДАР подключены к I входам блока вычисления относительных координат элементов ДАР и входам I цифровых сдвигающих устройств, выходы которых подключены к соответствующим I входам сумматора напряжений и к соответствующим входам квадраторов, а выход сумматора напряжений через квадратор суммы напряжений подключен к первому входу корреляционного вычислителя, выход которого подключен к входу интегратора, при этом выход интегратора подключен к первому входу порогового устройства, второй вход которого соединен с выходом вычислителя порога принятия решения, а выход порогового устройства подключен к входу индикатора, выходы которого соответственно подключены к второму входу блока управления характеристиками направленности и к входу вычислителя порога принятия решения и далее к входу блока управления активно-пассивными элементами ДАР; выход блока вычисления относительных координат элементов ДАР соединен с первым входом блока управления характеристиками направленности, соответствующие I выходы которого соединены с управляющими входами I цифровых сдвигающих устройств, отличающееся тем, что в корреляционном формирователе характеристики направленности с временной задержкой сигналов использовано I/k квадраторов, которые снабжены I/k соответствующими входами и I/k соответствующими выходами, подключенными к соответствующим I/k входам сумматора квадрированных процессов для суммирования в нем I/k квадрированных процессов, при I≥k>1, а между сумматором I/k квадрированных процессов и корреляционным вычислителем дополнительно установлен умножитель, вход которого подключен к выходу сумматора I/k квадрированных процессов, а выход умножителя подключен ко второму входу корреляционного вычислителя.
2. Устройство по п.1, отличающееся тем, что N ненаправленных пассивных и М активно-пассивных элементов размещены с возможностью изменения координат элементов ДАР относительно центра ДАР под воздействием внешних факторов.
| Устройство для многоточечного дистанционного контроля, регулирования и сигнализации физических параметров | 1956 |
|
SU118443A1 |
| УСТРОЙСТВО С КОРРЕЛЯЦИОННЫМ ФОРМИРОВАТЕЛЕМ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2005 |
|
RU2305297C2 |
| Резец | 1939 |
|
SU63550A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ОТНОШЕНИЯ СИГНАЛ/ШУМ | 2007 |
|
RU2341808C1 |
| US 3462590 A, 19.08.1969. | |||

