Изобретение относится к области радиотехники и может использоваться в радио- и гидролокационных следящих системах.
Известны устройства оценки параметров сигналов, содержащие фильтры, использующие принципы теории калмановской фильтрации, и преобразователи координат в системах местоопределения объектов [например, Казаринов Ю.М., Соколов А.И., Юрченко Ю.С. Проектирование устройств фильтрации радиосигналов. Л.: Изд-во Ленингр. ун-та, 1985, с.86-105, рисунки 5.1 и 5.2].
Известные устройства весьма чувствительны к измерениям с грубыми (аномальными) ошибками (помехами), значительно большими, чем принято для основной массы наблюдений.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство оценки координат, скорости и ускорения цели для следящей системы, содержащее антенну, к входу-выходу которой последовательно подключены приемно-излучающее устройство, сравнивающее устройство, блок умножителей, второй и третий входы которого соединены с вторыми и третьими выходами приемно-излучающего устройства, преобразователь координат инверсный, вычислитель переменного состояния, вырабатывающий оценки координат, скорости, ускорения, дальности цели и направляющих косинусов, второй выход которого соединен с вторым входом сравнивающего устройства и четвертым входом блока умножителей, преобразователь координат, второй вход которого соединен с вторым выходом преобразователя координат инверсного, блок управления антенной, выход которого подключен к вторым входам приемно-излучающего устройства и преобразователя координат инверсного, а также блок, вырабатывающий переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места, подключенный к пятым входам блока умножителей [Патент США №4179696 по классу G01S 9/22, 9/44 за 1980 г.].
Однако известное устройство имеет также недостаточную помехозащищенность. Поскольку реальная среда(особенно морская) оказывает весьма серьезные ограничения на распространения сигналов, то существует повышенная опасность того, что аномальные помехи могут увести апостериорную оценку устройства настолько, что последующее отождествление поступающих измерений с сопровождаемой целью станут невозможными.
Цель изобретения - повышение помехозащищенности устройства.
Для этого в устройство оценки координат, скорости и ускорения цели для следящей системы, содержащее антенну, к входу-выходу которой последовательно подключены приемно-излучающее устройство, сравнивающее устройство, блок умножителей, второй и третий входы которого соединены с вторыми и третьими выходами приемно-излучающего устройства, преобразователь координат инверсный, вычислитель переменного состояния, вырабатывающий оценки координат, скорости, ускорения, дальности цели и направляющих косинусов, второй выход которого соединен с вторым входом сравнивающего устройства и четвертым входом блока умножителей, преобразователь координат, второй вход которого соединен с вторым выходом преобразователя координат инверсного, блок управления антенной, выход которого подключен к вторым входам приемно-излучающего устройства и преобразователя координат инверсного, а также блок, вырабатывающий переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места, подключенный к пятым входам блока умножителей, введены обнаружитель аномальных помех, содержащий последовательно подключенные к каждой точке соединения входов блока умножителей с выходами приемно-излучающего и сравнивающего устройств, квадраторы, делители, к вторым входам которых присоединены выходы сумматоров, а к выходам - первые входы устройств принятия решений, и вычислитель оценок дисперсий измерений, подключенный первыми входами к точкам соединения выходов квадраторов с входами делителей, а вторыми входами - к выходам устройств принятия решений, причем выходы вычислителя оценок дисперсий измерений подключены к входам блока, вырабатывающего переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места, вторые выходы которого соединены с третьими входами вычислителя оценок дисперсий измерений и первыми входами сумматоров, при этом на вторые входы устройств принятия решений и сумматоров для дистанции, азимута и угла места цели поданы пороговые значения и дисперсии, принятые для основной массы измерений, соответственно.
На фиг.1 изображена структурная электрическая схема предложенного устройства; на фиг.2 - взаимное расположение систем координат:  - линии визирования (антенны) и XYZ-носителя; на фиг.3 - сравнительные оценки эффективности устройств по точности.
- линии визирования (антенны) и XYZ-носителя; на фиг.3 - сравнительные оценки эффективности устройств по точности.
Устройство содержит антенну 1, выполненную в виде решетки преобразователей, приемно-излучающее устройство 2, в котором имеются электронно-управляемые формирователи характеристик (диаграмм) направленности при приеме и излучении (на чертеже не показаны), сравнивающее устройство 3, блок умножителей 4, преобразователь координат инверсный 5, вычислитель переменного состояния 6, преобразователь координат 7, блок управления антенной 8, блок, вырабатывающий переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места 9, а также обнаружитель аномальных помех 10, содержащий квадраторы 11, делители 12, сумматоры 13, устройства принятия решений 14, и вычислитель оценок дисперсий измерений 15.
Устройство работает следующим образом. Антенна 1, установленная в носовой обтекаемой части носителя (например, торпеды), с помощью приемно-излучающего устройства 2 излучает через повторяющиеся промежутки времени в морскую среду, по направлению к цели, импульсы акустической энергии. Цель отражает часть энергии назад к антенне 1.
Принятые антенной 1 эхо-сигналы подаются на приемно-излучающее устройство 2, вырабатывающие сигналы, соответствующие измеренным в k-й момент времени (k=1, 2, 3, ...) дальности (дистанции) Rk и остаточным значениям угловых координат цели по азимуту  и углу места
и углу места  в координатной системе линии визирования
в координатной системе линии визирования  (фиг.2а), проходящей через три оси, направления на которую указывает ось диаграммы направленности антенны (ξ), перпендикулярное к ней вправо (η) и вниз (ζ) ортогонально последним двум направлениям, в режиме слежения.
(фиг.2а), проходящей через три оси, направления на которую указывает ось диаграммы направленности антенны (ξ), перпендикулярное к ней вправо (η) и вниз (ζ) ортогонально последним двум направлениям, в режиме слежения.
Выработанные приемно-излучающем устройством 2 оценки сигналов Rk и εA, k, εE, k поступают на входы сравнивающего устройства 3 и блока умножителей 4 соответственно. По второму входу сравнивающее устройство 3 принимает из вычислителя переменного состояния 6 прогнозированное на основе предшествующих в (k-1)-ый момент времени оценок значение дальности  Сравнивая оценки поступивших сигналов устройство 3 вычисляет остаточные значения дистанции
Сравнивая оценки поступивших сигналов устройство 3 вычисляет остаточные значения дистанции 
С выхода сравнивающего устройства 3 остаточные значения дальности ΔRk вместе со значениями угловых координат цели εA, k, εE, k, выработанные в приемно-излучающем устройстве 2, поступают на блок умножителей 4 и на квадраторы 11 обнаружителя аномальных помех 10.
В блоке умножителей 4 остаточные значения величин εA, k и εE, k умножаются на прогнозированное значение дистанции цели  выработанное в вычислителе переменного состояния 6, с тем чтобы вычислить поперечные остаточные значения дистанции цели по азимуту
выработанное в вычислителе переменного состояния 6, с тем чтобы вычислить поперечные остаточные значения дистанции цели по азимуту  и углу места
и углу места  (фиг.2б,в). Затем полученные значения величин
(фиг.2б,в). Затем полученные значения величин 
 умножаются на переменные коэффициенты усиления оценки
умножаются на переменные коэффициенты усиления оценки  И
И  рассматриваемые как весовые коэффициенты для углов азимута и места цели соответственно. Остаточное значение дистанции цели ΔRk также умножается на весовые коэффициенты
рассматриваемые как весовые коэффициенты для углов азимута и места цели соответственно. Остаточное значение дистанции цели ΔRk также умножается на весовые коэффициенты  В результате перемножений на выходе блока умножителей 4 вырабатываются значения:
В результате перемножений на выходе блока умножителей 4 вырабатываются значения: 

 которые поступают на входы преобразователя координат инверсного 5, образованный из транспонированных преобразовательных матриц:
которые поступают на входы преобразователя координат инверсного 5, образованный из транспонированных преобразовательных матриц:
где
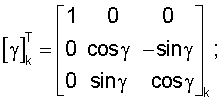
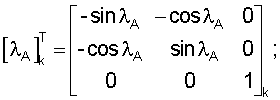
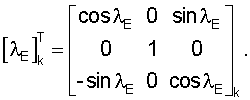
Информация об углах курса ψk, дифферента (тангажа) θk и крена γk носителя в k-тые моменты времени вырабатывается в преобразователе координат инверсном 5 используя автономную гироплатформу (на фиг.1 не показана), или снимается непосредственно с осей карданова подвеса гироплатформы системы управления носителя, как и в известном устройстве (прототипе), а значения величин углов λA, k- азимута и λE, k- возвышения оси диаграммы направленности антенны поступают на преобразователь координат инверсный 5 по второму входу из блока управления антенной 8.
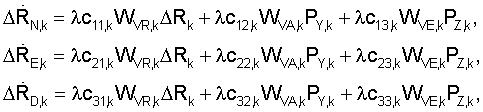
Преобразованные в k-м цикле измерений из координатной системы линии визирования  в стабильную опорную систему координат NED с осями, ориентированными, например, N - относительно севера, Е - востока и D - вниз ортогонально к ним оси, взвешенные значения остаточных величин:
в стабильную опорную систему координат NED с осями, ориентированными, например, N - относительно севера, Е - востока и D - вниз ортогонально к ним оси, взвешенные значения остаточных величин:
- координат
ΔRN,k=λc11,kWPR,kΔRk+λc12,kWPA,kPY,k+λc13,kWPE,kPZ,k
ΔRE,k=λc21,kWPR,kΔRk+λc22,kWPA,kPY,k+λc23,kWPE,kPZ,k
ΔRD,k=λc31,kWPR,kΔRk+λc32,kWPA,kPY,k+λc33,kWPE,kPZ,k
- первых производных координат (скорости)
и вторых производных координат (ускорения) цели
из преобразователя координат инверсного 5 вводятся в вычислитель переменного состояния 6.
Для получения откорректированных оценок вектора состояния цели, введенные остаточные величины складываются с соответствующими, прогнозированными к моменту k-го цикла измерения значениями координат  скорости
скорости  и ускорения цели
и ускорения цели  путем реализации в вычислителе переменного состояния 6 решения следующих уравнений:
путем реализации в вычислителе переменного состояния 6 решения следующих уравнений:

 ,
,
где



Δt - интервал времени между наблюдениями.
В вычислителе переменного состояния 6 вырабатываются также ожидаемые к моменту k-го цикла измерений значение дистанции  подаваемое по второму выходу на входы сравнивающего устройства 3 и блока умножителей 4, и оценки направляющих косинусов
подаваемое по второму выходу на входы сравнивающего устройства 3 и блока умножителей 4, и оценки направляющих косинусов
выдаваемых на преобразователь координат 7 (на фиг.1 обозначены  образованный из преобразовательных матриц
образованный из преобразовательных матриц
Значения величин углов курса ψ, дифферента θ и крена γ носителя подаются на преобразователь координат 7 по второму входу из преобразователя координат инверсного 5. Преобразованные из стабильной координатной системы (NED) в координатную систему носителя XYZ, которая проходит вдоль осей: Х - продольное направление носителя вперед, Y - вправо и Z - ортогонально последним двум направлениям вниз, прогнозированные оценки направляющих косинусов:



с выхода  (фиг.1) преобразователя 7 поступают на блок управления антенной 8 к моменту k-го цикла наблюдения. Блок 8, воздействуя на формирователь диаграммы направленности при приеме устройства 2, обеспечивает наведение антенны на цель путем поворота ее диаграммы направленности на прогнозированные значения углов по азимуту
(фиг.1) преобразователя 7 поступают на блок управления антенной 8 к моменту k-го цикла наблюдения. Блок 8, воздействуя на формирователь диаграммы направленности при приеме устройства 2, обеспечивает наведение антенны на цель путем поворота ее диаграммы направленности на прогнозированные значения углов по азимуту  и углу места
и углу места 
В обнаружителе аномальных помех 10 возведенные в квадрат остаточные значения  ,
,  выходов квадраторов 11 поступают одновременно на делители 12 и вычислитель оценок дисперсий измерений 15. На делителях 12 производятся нормирование поступивших остаточных значений по соответствующим, вычисленным в блоке вырабатывающем переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места 9 и сумматорах 13, дисперсиям априорных (теоретических) значений остаточных величин: дистанции
выходов квадраторов 11 поступают одновременно на делители 12 и вычислитель оценок дисперсий измерений 15. На делителях 12 производятся нормирование поступивших остаточных значений по соответствующим, вычисленным в блоке вырабатывающем переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места 9 и сумматорах 13, дисперсиям априорных (теоретических) значений остаточных величин: дистанции  угла азимута
угла азимута  и угла места
и угла места  цели, где ZR, ZA, ZE - принятые для основной массы наблюдений значения дисперсий измерений дистанции, углов азимута и места цели, подаваемые на вторые входы сумматора. Далее, полученные результаты для дистанции
цели, где ZR, ZA, ZE - принятые для основной массы наблюдений значения дисперсий измерений дистанции, углов азимута и места цели, подаваемые на вторые входы сумматора. Далее, полученные результаты для дистанции  углов азимута
углов азимута  и места цели
и места цели  в устройствах принятия решений 14, подключенных к выходам делителей 12, сравниваются с соответствующими пороговыми значениями для дистанции δR, угла азимута δA и угла места δE цели, подаваемых на вторые входы устройств 14.
в устройствах принятия решений 14, подключенных к выходам делителей 12, сравниваются с соответствующими пороговыми значениями для дистанции δR, угла азимута δA и угла места δE цели, подаваемых на вторые входы устройств 14.
В случае устойчивой работы предлагаемого устройства значения величин: JR,k, JA,k, JE,k распределены по закону  Задаваясь вероятностью р, близкой к 1 из таблиц
Задаваясь вероятностью р, близкой к 1 из таблиц  - распределения можно определить значения пороговых уровней δR, δA, δE, результаты сравнения с которыми можно использовать для контроля расходимости процесса оценивания. При превышении пороговых уровней
- распределения можно определить значения пороговых уровней δR, δA, δE, результаты сравнения с которыми можно использовать для контроля расходимости процесса оценивания. При превышении пороговых уровней  и
и  на выходах устройств принятия решений 14 выставляются значения величин
на выходах устройств принятия решений 14 выставляются значения величин  равными 1, т.е. принимается решение о поступлении на обработку измерений с аномальными помехами. Иначе, при
равными 1, т.е. принимается решение о поступлении на обработку измерений с аномальными помехами. Иначе, при  значения величин μR, k, μA, k, μA, k равны нулю.
значения величин μR, k, μA, k, μA, k равны нулю.
В вычислителе оценок дисперсий измерений 15 по поступившим на его входы из блоков 9, 11 и 14 данным вычисляются оценки дисперсий измерений:



В блоке 9 значения оценок  дисперсий k-го измерения дистанции азимута и угла места цели соответственно используются при вычислении переменных коэффициентов усиления оценок:
дисперсий k-го измерения дистанции азимута и угла места цели соответственно используются при вычислении переменных коэффициентов усиления оценок:
Здесь прогнозированные значения элементов матриц ошибок в оценке дистанции  угловых координат цели
угловых координат цели  вычисляются в блоке 9 путем реализации решения
вычисляются в блоке 9 путем реализации решения
следующих ковариационных матричных уравнений:
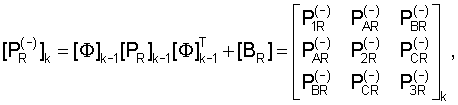
где
[BR], [BAZ], [ВEL] - ковариантные матрицы шума процесса обработки (для учета помех; возникающих при дискретизации и квантовании сигналов; а также ошибки из-за ограниченности разрядной сетки вычислителей);
Фk-1 и  - переходная и транспонированная переходная матрицы системы, индивидуальные элементы которых расположены следующим образом:
- переходная и транспонированная переходная матрицы системы, индивидуальные элементы которых расположены следующим образом:
Δt - интервал времени между измерениями.
Блок вычисления переменных коэффициентов усиления оценки 9 предназначен также для проведения следующих вычислений:
связанных со снижением неопределенности ковариационных матриц  ошибок в оценке дистанции, азимута и угла места цели соответственно с их первыми двумя производными.
ошибок в оценке дистанции, азимута и угла места цели соответственно с их первыми двумя производными.
Выработанные переменные коэффициенты усиления оценки, используемые для взвешивания остаточных величин: дистанции цели  азимута
азимута  и угла места
и угла места  подаются на пятые входы блока умножителей 4.
подаются на пятые входы блока умножителей 4.
Анализ рекуррентных соотношений для переменных коэффициентов усиления: оценки показывает, что в моменты появления аномальных помех коэффициенты  уменьшаются по модулю и оценки слабее зависят от измерений, в то время как соответствующие весовые коэффициенты в известном устройстве учитывают изменения помех в среднем.
уменьшаются по модулю и оценки слабее зависят от измерений, в то время как соответствующие весовые коэффициенты в известном устройстве учитывают изменения помех в среднем.
Сравнительные оценки по точности предлагаемого и известного устройств, при наличии измерений с аномальными помехами, иллюстрированы графиками (Фиг.3) результатов экспериментального исследования устройств путем статистического моделирования на ЭВМ процесса оценивания вектора состояния цели. Нормированные по оценкам оптимального (для известных истинных значений аномальных помех и моментов их поступления) устройства ошибок:
Р(1R)k - дистанции (Фиг.3а);
P(LA)k - азимута (Фиг.3б);
Р(1E)k - угла места цели (Фиг.3в),
вычисленные предлагаемым устройством (кривые 1), при пороговых значениях δR=δA=δE=9.0 превосходят по точности (близки к оценкам оптимального устройства) оценок ошибок (кривые 2) известного устройства (прототипа). Это подтверждает работоспособность и защищенность от аномальных помех предлагаемого устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| Способ определения координат воздушного судна по сигналам несинхронизированных передатчиков помех глобальным навигационным спутниковым системам | 2023 |
|
RU2811068C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2009 |
|
RU2419106C1 |
| СПОСОБ АДАПТИВНОЙ ПРОСТРАНСТВЕННОЙ КОМПЕНСАЦИИ ПОМЕХ ПРИ МОНОИМПУЛЬСНОМ АМПЛИТУДНОМ СУММАРНО-РАЗНОСТНОМ ПЕЛЕНГОВАНИИ И НАЛИЧИИ ОШИБОК КАЛИБРОВКИ ПРИЕМНЫХ КАНАЛОВ | 2011 |
|
RU2456631C1 |
| СПОСОБ ПОИСКА ИСТОЧНИКОВ ИЗЛУЧЕНИЙ СЛОЖНЫХ СИГНАЛОВ | 2016 |
|
RU2605691C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2022 |
|
RU2801361C1 |
Изобретение относится к области радиотехники и может использоваться в радио- и гидролокационных следящих системах. Техническим результатом является повышение помехозащищенности устройства. Устройство оценки координат, скорости и ускорения цели для следящей системы содержит антенну, приемно-излучающее устройство, сравнивающее устройство, блок умножителей, преобразователь координат инверсный, вычислитель переменного состояния, преобразователь координат, блок управления антенной, блок, вырабатывающий переменные коэффициенты усиления оценки, при этом в устройство введены обнаружитель аномальных помех и вычислитель оценок дисперсий измерений. 3 ил.
Устройство оценки координат, скорости и ускорения цели для следящей системы, содержащее антенну, к входу-выходу которой последовательно подключены приемно-излучающее устройство, сравнивающее устройство, блок умножителей, второй и третий входы которого соединены с вторыми и третьими выходами приемно-излучающего устройства, преобразователь координат инверсный, вычислитель переменного состояния, вырабатывающий оценки координат, скорости, ускорения, дальности цели и направляющих косинусов, второй выход которого соединен с вторым входом сравнивающего устройства и четвертым входом блока умножителей, преобразователь координат, второй вход которого соединен с вторым выходом преобразователя координат инверсного, блок управления антенной, выход которого подключен к вторым входам приемно-излучающего устройства и преобразователя координат инверсного, а также блок, вырабатывающий переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места, подключенный к пятым входам блока умножителей, отличающееся тем, что в устройство введены обнаружитель аномальных помех, содержащий последовательно подключенные к каждой точке соединения входов блока умножителей с выходами приемно-излучающего и сравнивающего устройств, квадраторы, делители, к вторым входам которых соединены выходы сумматоров, а к выходам - первые входы устройств принятия решений, и вычислитель оценок дисперсий измерений, подключенный первыми входами к точкам соединения выходов квадраторов с входами делителей, а вторыми входами - к выходам устройств принятия решений, причем выходы вычислителя оценок дисперсий измерений подключены к входам блока, вырабатывающего переменные коэффициенты усиления оценки остаточных величин дистанции, поперечных значений дистанции цели по азимуту и углу места, вторые выходы которого соединены с третьими входами вычислителя оценок дисперсий измерений и первыми входами сумматоров, при этом на вторые входы устройств принятия решений и сумматоров для дистанции, азимута и угла места цели поданы пороговые значения и дисперсии, принятые для основной массы измерений, соответственно.
| US 4179696 А, 18.12.1979 | |||
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СИСТЕМА ПОДСВЕТА ОБЪЕКТА | 1999 |
|
RU2163353C1 |
| СЛЕДЯЩИЙ РАДИОЛОКАЦИОННЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ С ЗАЩИТОЙ ОТ УВОДЯЩИХ ПОМЕХ | 2000 |
|
RU2178895C1 |
| СЫРЬЕВАЯ СМЕСЬ ДЛЯ ИЗГОТОВЛЕНИЯ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2009 |
|
RU2415103C1 |
| JP 2002162463 A, 07.06.2002. | |||

