Изобретение относится к гидроакустике, а именно к устройствам обнаружения гидроакустических сигналов, определения пространственного направления их прихода в точку наблюдения на фоне интенсивных изотропных и анизотропных акустических помех природного и техногенного происхождения.
Известно устройство для определения направления на источник акустических сигналов, содержащее дискретную антенную решетку состоящую из N ненаправленных акустических приемников, размещенных по случайному закону в апертурном объеме (случайная антенная решетка (CAP)), сигналы от которых по своим каналам передачи информации поступают на аддитивный формирователь отклика пространственного фильтра (характеристики направленности (ХН)) с частотной задержкой и оконным взвешиванием сигналов, включающий в себя вычислитель быстрого преобразования Фурье, вычислитель частотных коэффициентов компенсации (частотная линия задержки), экстраполятор сигналов, вычислитель взвешенных значений сигналов, сумматор напряжений, детектор и интегратор (Патент США №4559605; МПК G06F 015/31, G06F 015/332, G01S 003/80; НКИ 708/403, 250/265, 367/5, 367/122, 367/138, 708/5, 708/404; дата 17.12.85 г.).
Недостатками этого устройства являются: большое математическое ожидание поля добавочных максимумов, что в условиях малого отношениях сигнала к помехе на входе элементов CAP делает невозможным обнаружение сигнала с заданными вероятностями ложных тревог, правильного обнаружения сигнала и однозначного определения направления на источник сигнала; оно имеет высокие техническую сложность и экономические затраты на создание устройства.
На устранение этих недостатков направлено другое известное устройство для определения направления на источник акустических сигналов, содержащее дискретную антенную решетку, состоящую из N ненаправленных акустических приемников, размещенных в пространстве по случайному закону в апертурном объеме (CAP), а также N каналов передачи информации и корреляционный формирователь ХН с временной задержкой сигналов, включающий в себя линии задержки, сумматоры напряжений и мощности, корреляционный вычислитель и интегратор (Патент №23107 (RU); МПК7 G01S 3/00; приоритет 16.11.2001 г. Устройство для определения направления на источник акустических сигналов / Долгих В.Н., Бородин А.Е. // Изобретения. Полезные модели: Оф. бюл. Роспатента. - М.: ФИПС, 20.05.2002. - №14). При отношении сигнала к помехе на входе элементов CAP меньше единицы корреляционный формирователь ХН по сравнению с первым аналогом обеспечивает повышение помехоустойчивости на 15-20%, снижение математического ожидания поля добавочных максимумов, сужение главного максимума отклика пространственного фильтра при меньших конструктивных и экономических затратах (Долгих В.Н., Бородин А.Е. Высокопроизводительный метод корреляционной обработки информации в пространственном фильтре акустических сигналов. - М: ГЕОС, сб. труд. XI сессии РАО, 2001. Т-2, с.22-25).
Основным недостатком обоих известных аналогов является то, что они не могут применяться в условиях свободного дрейфа (случайного перемещения) элементов CAP, вызванного воздействием ветра и (или) гидродинамического поля океана. Вследствие этого воздействия происходит случайное изменение относительных координат элементов и пространственных размеров CAP, что ведет к увеличению математического ожидания поля добавочных максимумов, снижению помехоустойчивости пространственного фильтра и, в конечном итоге, к невозможности обнаружения сигнала и определения направления на его источник.
На устранение этого основного недостатка известных аналогов направлено выбранное в качестве прототипа устройство, содержащее дискретную антенную решетку, состоящую из N ненаправленных акустических приемников, размещенных по случайному закону в апертурном объеме (случайная антенная решетка CAP), сигналы от которых по своим каналам передачи информации поступают на аддитивный формирователь ХН с временной задержкой сигналов, включающий в себя линии задержки, сумматор напряжений, детектор и интегратор. Входящие в состав устройства М активно-пассивных элементов CAP, блок управления активно-пассивными элементами и блок вычисления относительных координат элементов CAP позволяют устранить негативный эффект от свободного дрейфа (случайного перемещения) элементов путем измерения с требуемой периодичностью их относительных координат и введения соответствующих поправок в линии задержки аддитивного формирователя ХН. Измерение направления на источник сигналов обеспечивается блоком управления ХН (Агравал, Лоу. Распределение бокового излучения в решетках со случайным расположением элементов. ТИИЭР, 57, 123-134, окт. 1969.)
Недостатком этого устройства является большое математическое ожидание поля добавочных максимумов в связи с применением аддитивного метода обработки входных процессов, что делает сложным однозначное определение направления на источник сигнала при малом отношении сигнала к помехе на входе антенной решетки. Устранение этого недостатка возможно при замене аддитивного формирователя ХН на корреляционный формирователь ХН.
Кроме того, аналоги и прототип не имеют в своем составе устройств принятия решения об обнаружении сигнала и вычисления порога принятия решения, которые необходимы при решении задач обнаружения шумящих объектов.
Применение корреляционного формирователя ХН требует разработки нового устройства принятия решения со схемой вычисления порога принятия решения, учитывающего особенности многоканальной корреляционной обработки случайных входных процессов.
Перечисленные недостатки, присущие аналогам и прототипу, устранены в заявляемом техническом решении "Устройстве с корреляционным формирователем характеристики направленности для обнаружения гидроакустических сигналов и определения направления на их источник". Реализация поставленной задачи позволяет достичь:
1. стабилизации математического ожидания поля добавочных максимумов в условиях свободного дрейфа (случайного перемещения) элементов CAP за счет периодического определения относительных координат элементов CAP;
2. повышения помехоустойчивости устройства, за счет применения корреляционного формирователя ХН;
3. решения задачи обнаружения сигналов при использовании корреляционного формирователя ХН за счет включения устройства принятия решения с вычислителем порога принятия решения.
Указанный технический результат достигается тем, что заявляемое "Устройство с корреляционным формирователем характеристики направленности для обнаружения гидроакустических сигналов и определения направления на их источник" содержит дискретную антенную решетку, состоящую из N ненаправленных акустических приемников, размещенных по случайному закону в апертурном объеме (случайная антенная решетка CAP) и М (2-3) активно-пассивных элемента CAP, сигналы от которых по своим каналам (N+M) передачи информации поступают на блок вычисления относительных координат элементов CAP и на корреляционный формирователь ХН с временной задержкой сигналов, включающий в себя линии задержки, управляемые блоком управления ХН, сумматоры напряжений и мощности, квадраторы и квадратор суммы напряжений, корреляционный вычислитель и интегратор. В устройство дополнительно включены пороговое устройство с вычислителем порога принятия решения, блок управления активно-пассивными элементами и индикатор. Причем выход интегратора подключен к первому входу порогового устройства, второй вход которого соединен с выходом вычислителя порога обнаружения сигнала, а выход порогового устройства подключен к входу индикатора, выходы которого подключены ко второму входу блока управления ХН и входу вычислителя порога принятия решения.
Такое взаимное расположение вышеперечисленных конструктивных элементов необходимо для достижения следующих технических эффектов:
- измерения с заданной погрешностью относительных координат всех акустических приемников, входящих в состав антенной решетки;
- исключения помех приему полезных сигналов при работе активно-пассивных преобразователей в режиме излучения измерительных посылок;
- регулирование величин компенсационных временных задержек сигнала в каждом канале на выходе CAP в зависимости от взаимного пространственного расположения электроакустических преобразователей и заданного направления ХН;
- автоматическое или автоматизированное (при участии оператора) принятие решения об обнаружении сигналов;
- определение направления на источник сигналов.
Сущность изобретения поясняется чертежом. Устройство с корреляционным формирователем характеристики направленности для обнаружения сигналов и определения направления на их источник. Функциональная схема.
В состав устройства входят:
1. Пассивный элемент CAP (свободно перемещающийся в пространстве ненаправленный акустический приемник). Общее количество пассивных элементов в составе CAP равно N.
2. Активно-пассивный элемент CAP (свободно перемещающийся в пространстве ненаправленный акустический приемник с совмещенным ненаправленным акустическим излучателем). Общее количество активно-пассивных элементов в составе CAP равно М.
3. Канал передачи информации (число каналов равно N+M).
4. Блок вычисления относительных координат элементов CAP.
5. Блок управления ХН.
6. Линия временной задержки. Общее количество линий задержек равно M+N.
7. Корреляционный формирователь ХН с временной задержкой сигналов.
8. Сумматор напряжений.
9. Квадратор суммы напряжений.
10. Квадратор. Общее количество квадраторов равно M+N.
11. Сумматор мощности.
12. Корреляционный вычислитель.
13. Интегратор.
14. Пороговое устройство.
15. Вычислитель порога принятия решения.
16. Индикатор.
17. Блок управления активно-пассивными элементами.
Заявляемое устройство содержит: дискретную антенную решетку, состоящую из N пассивных элементов CAP (1), размещенных по случайному закону в апертурном объеме, и М (2-3) активно-пассивных элементов CAP (2), соответствующих им каналов передачи информации (3), выходы которых подключены к N+M входам блока вычисления относительных координат элементов CAP (4) и входам N линий временной задержки (6), выходы которых подключены к N входам сумматора напряжений (8) и входам N квадраторов (10). Выход сумматора напряжений (8) через квадратор суммы напряжений (9) подключен к первому входу корреляционного вычислителя (12). Ко второму входу корреляционного вычислителя (12) подключен выход сумматора мощности (11), к N входам которого подключены выходы N квадраторов (10). Выход корреляционного вычислителя (12) через интегратор (13) подключен к первому входу порогового устройства (14), второй вход которого соединен с выходом вычислителя порога принятия решения (15) об обнаружении сигнала или о наличии во входном процессе только помехи. Выход блока вычисления относительных координат элементов CAP (4) соединен с первым входом блока управления ХН (5), N выходов которого соединены с управляющими входами N линий временной задержки (6). Выход порогового устройства (14) подключен к входу индикатора, выходы которого подключены ко второму входу блока управления ХН (5) и входу вычислителя порога принятия решения (15) об обнаружении сигнала или наличии во входном процессе только помехи.
Устройство работает следующим образом.
Размещаются любым известным в морской практике способом по случайному закону N пассивных элементов CAP (1) с заданными максимальными размерами CAP. M активно-пассивных элементов CAP (2) устанавливаются в два (для плоских CAP, координаты элементов которой определяются двумя координатами X, Y) или три (для объемных CAP, координаты элементов которой определяются тремя координатами X, Y, Z)) угла разностороннего треугольника, в который вписаны все пассивные элементы CAP (1). Предусмотрено два режима работы устройства: "Измерение координат" и "Обзор".
В первом режиме "Измерение координат" выполняется цикл измерения относительных координат элементов CAP, для чего блок управления активно-пассивными элементами (17) через М каналов передачи информации (3) последовательно подает команды на излучение измерительных гидроакустических сигналов каждым активно-пассивным элементом CAP (2). Поступающая по каналам передачи (3) информация от N элементов CAP (1) и М активно-пассивных элементов CAP (2) автоматически обрабатывается в блоке вычисления относительных координат элементов CAP (4). Для этого корреляционным способом последовательно измеряются времена распространения измерительных сигналов от активно-пассивных элементов CAP (2), работающих в режиме излучения, до всех остальных элементов CAP, работающих в пассивном режиме и рассчитываются координаты элементов путем решения уравнений окружности (для плоских САР) или сферических поверхностей (для объемных CAP). Измеренные относительные координаты запоминаются в блоке управления ХН (5).
В режиме "Обзор" принятые пассивными элементами CAP (1) и активно-пассивными элементами CAP (2), работающими в пассивном режиме, акустические сигналы по соответствующим каналам передачи информации (3), которые выполняют предварительное усиление и фильтрацию сигналов, передаются на входы N+M линий временной задержки (6) корреляционного формирователя характеристики направленности с временной задержкой сигналов (7). В линиях задержки (6) устанавливается величины задержек, вычисленные блоком управления ХН (5), обеспечивающие настройку устройства на заданное пространственное направление с учетом относительных координат соответствующих пассивных элементов CAP (1). Напряжения с выходов линий задержек (6) поступают на входы сумматора напряжений (8) и входы соответствующих M+N квадраторов (10). С выхода сумматора напряжений (8) значение мгновенной суммы сигналов на пассивных элементах CAP (1) поступает на квадратор суммы напряжений (9) и с его выхода значение суммарной мгновенной мощности сигналов поступает на первый вход корреляционного вычислителя (12). Выходные значения M+N квадраторов (10) поступают на сумматор мощности (11). С его выхода сумма мгновенных мощностей поступает на второй вход корреляционного вычислителя (12). В корреляционном вычислителе (12) вычисляется мгновенное значение коэффициента пространственной корреляции акустического сигнала, приходящего с заданного направления, временное усреднение которого выполняется в интеграторе (13).
Усредненное значение коэффициента пространственной корреляции акустического сигнала сравнивается в пороговом устройстве (14) с порогом, вычисленным в вычислителе порога принятия решения (15) об обнаружении сигнала или помехи. Относительный порог принятия решения зависит от числа приемников в составе CAP, ее пространственных размеров и объема усредняемой выборки и может быть определен как

где U0 - пороговое значение; σn - эффективное значение помехи; Вlt - вероятность ложной тревоги; В - число функций взаимной корреляции между выходными процессами всех возможных пар приемников CAP; ρn - средний в рабочей полосе частот и по апертуре CAP пространственный коэффициент взаимной корреляции помех; К - объем усредняемой выборки (в случае использования аналоговых методов обработки объем усредняемой выборки можно заменить временем интегрирования Т). Необходимые исходные значения задаются оператором и поступают на вход вычислителя порога обнаружения сигнала (15) с первого выхода индикатора (16). Если выходной сигнал интегратора (13) превышает величину относительного порога, то принимается решение об обнаружении сигнала и на выходе порогового устройства (14) появляется сигнал, отображаемый на индикаторе (16).
Необходимые исходные значения для вычисления относительного порога задаются оператором и поступают на вход вычислителя порога обнаружения сигнала (15) с первого выхода индикатора (16). Со второго выхода индикатора (16) на второй вход блока управления ХН (5) поступает значение заданного (или текущего) направления ХН. В результате происходит обнаружение сигнала и определяется направление на его источник. Устройство работает в режиме "Обзор" до истечения интервала времени, в течение которого осуществляется обзор пространства в заданном секторе пространственных углов.
Таким образом, технический результат изобретения заключается в создании нового устройства с корреляционным формирователем характеристики направленности для обнаружения гидроакустических сигналов и определения направления на их источник в условиях свободного перемещения в пространстве приемников случайной антенной решетки, позволяющего производить обнаружение и пеленгование нескольких надводных и (или) подводных объектов, находящихся в различных точках пространства, с меньшей вероятностью ложной тревоги и большей вероятностью обнаружения.
Заявляемое устройство промышленно применимо, так как при его изготовлении могут быть использованы широко распространенные устройства и компоненты, такие как: приемники акустических сигналов, аналоговые усилители и фильтры, аналого-цифровые преобразователи, цифровые устройства памяти с произвольным доступом, цифровые процессоры обработки сигналов, выпускаемые серийно отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2012 |
|
RU2499276C1 |
| КОРРЕЛЯЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2012 |
|
RU2501030C2 |
| Устройство для обнаружения сигналов и определения направления на их источник | 2016 |
|
RU2617884C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2013 |
|
RU2523095C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2549207C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ КВАДРАТУРНОГО ПРИЕМНИКА | 2013 |
|
RU2550757C1 |
| ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1991 |
|
RU2106652C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПЕЛЕНГОВАНИЯ АКУСТИЧЕСКИХ СИГНАЛОВ ЭМИССИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2610568C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2105321C1 |
| СПОСОБ НАПРАВЛЕННОГО ПРИЕМА ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1990 |
|
SU1840431A1 |
Устройство с корреляционным формирователем характеристики направленности (ХН) для обнаружения гидроакустических сигналов и определения направления на их источник относится к гидроакустике. Сущность изобретения заключается в том, что выполненный определенным образом корреляционный формирователь характеристики направленности, в совокупности с остальными элементами заявленного устройства, обеспечивает в условиях случайных входных процессов обнаружение и пеленгование нескольких надводных и (или) подводных объектов, находящихся в различных точках пространства. Достигаемым техническим результатом заявленного изобретения является повышение помехоустойчивости устройства, решение задачи обнаружения гидроакустических сигналов и стабилизация уровня ложной тревоги решения. Устройство обеспечивает стабилизацию обнаружителя при использовании корреляционного формирователя ХН и измерение направления на их источник при малых конструктивных и эксплуатационных затратах. 2 з.п. ф-лы, 1 ил.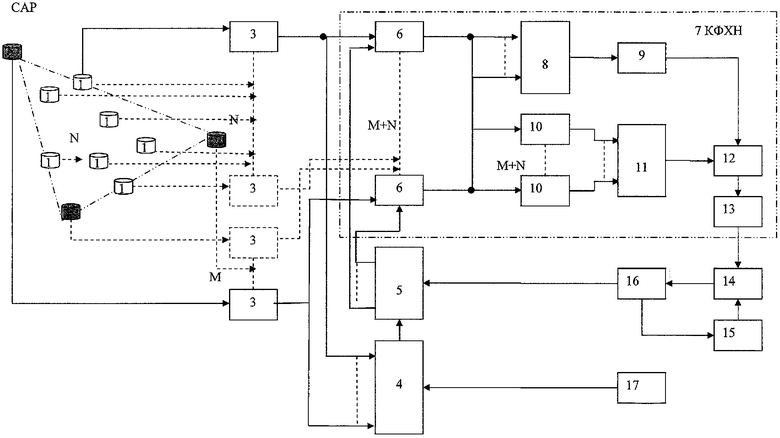
| Винтомоторный реактивный самолет с применением поворотных сопел | 1928 |
|
SU23107A1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЧАСТОТНЫХ ГИДРОАКУСТИЧЕСКИХ ИЗЛУЧЕНИЙ | 1995 |
|
RU2096808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ГИДРОАКУСТИЧЕСКОГО СИГНАЛА (ВАРИАНТЫ) | 2001 |
|
RU2196362C2 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКИХ ОБЪЕКТОВ | 1998 |
|
RU2145426C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| US 3462590, 19.08.1969 | |||
| 0 |
|
SU198796A1 | |
| Измельчитель (варианты) | 2024 |
|
RU2840998C1 |

