Изобретение относится к гидроакустике, а именно к устройствам обнаружения гидроакустических сигналов, определения пространственного направления их прихода в точку наблюдения на фоне изотропных и анизотропных помех природного и техногенного происхождения и может быть использовано в радиолокации, радиосвязи и радиоастрономии.
Известное устройство содержит дискретную антенную решетку (ДАР), состоящую из I=Ν+M элементов (N - пассивные ненаправленные ЭАП; M - активно-пассивные ЭАП) и соответствующих им I каналов передачи информации, блок управления характеристиками направленности, блок вычисления относительных координат элементов ДАР и корреляционный формирователь характеристики направленности. Кроме того, в состав устройства входят пороговое устройство, вычислитель порога принятия решения, блок управления активно-пассивными элементами ДАР и индикатор. Причем выход интегратора подключен к первому входу порогового устройства, второй вход которого соединен с выходом вычислителя порога принятия решения, а выход порогового устройства подключен к входу индикатора, выходы которого подключены ко второму входу блока управления характеристиками направленности и входу вычислителя порога принятия решения. При этом блок управления активно-пассивными элементами ДАР через M каналов передачи информации через заданный промежуток времени последовательно подает команды на излучение измерительных гидроакустических сигналов каждым активно-пассивным элементом ДАР (Патент на изобретение №2305297; МПК G01S 3/802 (2006.01); приоритет 05 июля 2005. Устройство с корреляционным формирователем характеристики направленности для обнаружения сигналов и определения направления на их источник. Бородин А.Е., Долгих В.Н., Ламека А.П. //Изобретения. Полезные модели: Оф. бюлл. Роспатента. - М.: ФИПС, 20.05.2007. - №14).
Основными недостатками аналога являются значительное число нелинейных операций: I+1, где I=N+М.
Этот недостаток аналога устранен в другом известном устройстве для обнаружения сигналов и определения направления на их источник (Патент №125719 Российская Федерация, МПК G01S 3/802. Устройство для обнаружения сигналов и определения направления на их источник /Долгих В.Н., Ушаков К.Α.; заявитель и патентообладатель Федеральное государственное казенное военное образовательное учреждение высшего профессионального образования «Военный учебно-научный центр Военно-Морского Флота «Военно-Морская Академия имени Адмирала Флота Советского Союза Н.Г. Кузнецова». - №2012126687/07; заявл. 26.06.2012; опубл.10.03.2013. Оф. бюлл. Роспатента №7. - 2 с.: ил.).
Недостатком прототипа является то, что при большом числе обнаруживаемых сигналов, приходящих с различных пространственных направлений, или в случае малого сектора обзора пространства может уменьшаться вероятность первичного обнаружения или пропуск сигналов, создаваемых маломощными источниками волн.
Следующий аналог представляет собой известное устройство для обнаружения сигналов и определения направления на их источник, которое является наиболее близким заявленному техническому решению и выбрано в качестве прототипа (Патент №2523095 Российская Федерация, МПК G01S 3/802. Устройство для обнаружения сигналов и определения направления на их источник /Долгих В.Н.; заявитель и патентообладатель Долгих В.Н. - №2013116621/28; заявл. 11.04.2013; опубл. 20.07.2014, Оф. бюлл. Роспатента №20. - 2 с.: ил.).
Прототип содержит ДАР, включающую N ненаправленных электроакустических преобразователей (ЭАП), которые могут перемещаться в пространстве под воздействием внешних сил на ДАР и ее ЭАП, M активно-пассивных ЭАП ДАР (ненаправленные акустические приемники с совмещенными ненаправленными акустическими излучателями, перемещающимися в пространстве под воздействием внешних сил на ДАР и ее ЭАП), канал передачи выходных процессов ЭАП ДАР (число каналов передачи информации равно I=N+М), блок вычисления относительных координат ЭАП ДАР, блок управления характеристиками направленности (ХН), формирователь ХН (ФХН) с временной задержкой сигналов, пороговое устройство, вычислитель порога принятия решения, индикатор, блок управления активно-пассивными элементами ДАР, пульт оператора. В состав ФХН входят цифровые сдвигающие устройства (линии временной задержки, общее количество линий задержек равно I=N+М), сумматор напряжений, квадратор суммы напряжений, интегратор, запоминающее устройство, блок определения среднего значения отклика обнаружителя, вычитающее устройство, микропроцессорное устройство.
Недостатком прототипа является то, что отсутствует возможность адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей, что может уменьшить вероятность первичного обнаружения или увеличить вероятность пропуска сигналов, создаваемых маломощными источниками волн.
Известно, что обязательным условием эффективной работы устройств такого типа является идентичность каналов передачи выходных процессов электроакустических преобразователей. Недостатком известного устройства является то, что в каналах передачи выходных процессов электроакустических преобразователей не предусмотрена возможность адаптивной компенсации их неидентичности, которая необходима в связи с ограниченностью объема выборки (длительности реализации) обрабатываемых случайных процессов, старением радиоэлементной базы и естественного «ухода» параметров усилителей и чувствительности электроакустических преобразователей с течением времени или под влиянием внешних факторов. Ограниченность выборки приводит к тому, что выходные процессы электроакустических преобразователей имеют разные случайные энергетические параметры (дисперсию и среднеквадратичное отклонение). Случайные значения энергетических параметров входных процессов усилителей, флуктуации коэффициентов усиления усилителей приводят к тому, что идентичность каналов передачи выходных процессов электроакустических преобразователей нарушается. В результате значения откликов устройств на смесь сигнала с помехой уменьшаются, что приводит к снижению отношения сигнала к помехе на входе устройства принятия решения, а значит и к уменьшению вероятности обнаружения сигнала. При малых отношениях сигнала к помехе на входе антенной системы отклик устройств на смесь помехи с сигналом, приходящим с определенного пространственного направления, маскируется откликом устройств на помехи, приходящие с других пространственных направлений. Это обусловлено тем, что большой уровень бокового поля пространственного отклика на смесь сигнала с помехой не позволяет определить направление прихода сигнала с заданной вероятностью. В результате снижается или даже полностью исключается возможность обнаружения сигнала и определения пространственного направления на его источник.
На устранение указанного недостатка прототипа направлено новое техническое решение «Устройство для обнаружения сигналов и определения направления на их источник» (сокращенно обнаружитель), технической задачей которого является создание нового обнаружителя, в состав которого введен блок адаптивной компенсации неидентичности каналов, позволяющий увеличить вероятность первичного обнаружения сигналов и уменьшить вероятность пропуска «слабых» сигналов. Принципиальным отличием заявленного изобретения от прототипа является то, что обнаружитель содержит блок адаптивной компенсации неидентичности каналов.
Реализация поставленной задачи при малых отношениях сигнала к помехе на входе ДАР позволяет получить следующий суммарный технический результат:
1. Повысить вероятность первичного обнаружения сигналов.
2. Уменьшить вероятность пропуска «слабых» сигналов.
3. Увеличить пространственную разрешающую способность сигналов.
4. Улучшить эффективность обнаружения сигналов и определения направления на их источник при больших отношениях сигнала к помехе на входе ДАР (по сравнению с аналогами и прототипом).
5. Уменьшить вероятность пропуска сигналов, создаваемых маломощными источниками волн.
Указанный технический результат достигается тем, что заявленное изобретение «Устройство для обнаружения сигналов и определения направления на их источник» содержит дискретную антенную решетку (ДАР), включающую N ненаправленных пассивных и M активно-пассивных элементов и соответствующих им I, равных N+M, каналов передачи выходных процессов электроакустических преобразователей ДАР, блок вычисления относительных координат элементов ДАР, блок управления характеристиками направленности, пороговое устройство, вычислитель порога принятия решения, индикатор, блок управления активно-пассивными элементами ДАР и пульт оператора, а также формирователь характеристик направленности с временной задержкой сигналов, содержащий I цифровых сдвигающих устройств, сумматор напряжений, квадратор суммы напряжений, интегратор, запоминающее устройство, блок определения среднего значения отклика обнаружителя, микропроцессорное устройство и вычитающее устройство; при этом соответствующие выходы I каналов передачи выходных процессов ЭАП ДАР параллельно подключены к I входам блока вычисления относительных координат элементов ДАР; выходы соответствующих цифровых сдвигающих устройств подключены к соответствующим I входам сумматора напряжений, а выход сумматора напряжений через квадратор суммы напряжений подключен к входу интегратора, выход которого подключен к входу запоминающего устройства; в свою очередь первый выход запоминающего устройства соединен с первым входом блока определения среднего значения отклика обнаружителя, а второй выход - с первым входом вычитающего устройства, выход которого подключен ко второму входу порогового устройства; второй выход порогового устройства соединен со вторым входом блока определения среднего значения отклика обнаружителя; причем первый вход порогового устройства соединен с выходом вычислителя порога принятия решения, а первый выход порогового устройства подсоединен к первому входу индикатора, первый и второй выходы которого соединены со вторым входом блока управления характеристиками направленности и входом блока управления активно-пассивными элементами ДАР соответственно; в свою очередь выход блока управления активно-пассивными элементами ДАР параллельно подключен к соответствующему входу блока вычисления относительных координат элементов ДАР и к входам M каналов передачи выходных процессов активно-пассивных ЭАП ДАР, выход блока вычисления относительных координат элементов ДАР соединен с первым входом блока управления характеристиками направленности, I выходов которого соединены с управляющими входами I цифровых сдвигающих устройств; первый выход микропроцессорного устройства соединен со вторым входом вычитающего устройства, а второй выход - с входом вычислителя порога принятия решения; входы микропроцессорного устройства соединены соответственно с выходом блока определения среднего значения отклика обнаружителя, вторым выходом порогового устройства и вторым выходом пульта оператора, первый выход пульта оператора соединен со вторым входом индикатора, третий выход которого подключен к входу пульта оператора, а остальные выходы пульта оператора соединены с управляющими входами блока питания, каналов передачи данных выходных процессов ЭАП ДАР, блока управления характеристиками направленности и цифровыми сдвигающими устройствами. Принципиальным отличием заявленного изобретения от прототипа является то, что устройство дополнительно содержит блок адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР. При этом выходы каналов передачи выходных процессов N ненаправленных пассивных и M активно-пассивных элементов ДАР подсоединены к соответствующим входам блока адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР, выходы которого подсоединены к входам I цифровых сдвигающих устройств формирователя характеристик направленности.
Объем оперативной памяти блока адаптивной компенсации неидентичности каналов и программное обеспечение его функционирования должны обеспечивать оценку среднеквадратичного отклонения выходных процессов каналов передачи выходных процессов электроакустических преобразователей антенной решетки, оценку и хранение текущего среднего значения средне-квадратических отклонений выходных процессов каналов, расчет и хранение весовых коэффициентов для каждого канала, умножение выходных процессов каналов передачи на весовые коэффициенты.
Умножение выходных процессов каналов передачи выходных процессов N ненаправленных пассивных и M активно-пассивных элементов ДАР позволяет получить идентичные параметры всех выходных процессов каналов тракта предварительной обработки выходных процессов электроакустических преобразователей антенной решетки.
Именно наличие этих отличительных признаков позволяет получить заявленный технический результат.
В заявленном устройстве - обнаружителе такое взаимное расположение вышеперечисленных конструктивных элементов необходимо для достижения следующих технических эффектов:
1. Повысить вероятность первичного обнаружения сигналов.
2. Уменьшить вероятность пропуска «слабых» сигналов.
3. Увеличить пространственную разрешающую способность сигналов.
4. Уменьшить вероятность пропуска сигналов, создаваемых маломощными источниками волн.
При этом повышается эффективность пеленгования, пространственного разрешения и обнаружения сигналов при малых отношениях сигнала к помехе на входе ДАР и сохраняются основные положительные качества аналогов и прототипа при любых отношениях сигнала к помехе на входе ДАР:
- измерение с заданной погрешностью относительных координат всех акустических приемников, входящих в состав антенной решетки;
- исключение помех приему полезных сигналов при работе активно-пассивных преобразователей в режиме излучения измерительных посылок;
- регулирование величин компенсационных временных задержек сигнала в каждом канале на выходе ДАР в зависимости от взаимного пространственного расположения электроакустических преобразователей и заданного направления обзора пространства;
- автоматическое или автоматизированное (при участии оператора) принятие решения об обнаружении сигналов;
- определение направления на источник сигналов.
Сущность изобретения поясняется чертежом:
Фиг. 1. Устройство для обнаружения сигналов и определения направления на их источник. Функциональная схема.
В состав устройства входят:
1. Пассивный элемент дискретной антенной решетки (ДАР) (перемещающийся в пространстве под воздействием внешних сил на ДАР и ее ЭАП, ненаправленный акустический приемник, общее количество пассивных элементов в составе ДАР равно N).
2. Активно-пассивный элемент ДАР (перемещающийся в пространстве под воздействием внешних сил на ДАР и ее ЭАП, ненаправленный акустический приемник с совмещенным ненаправленным акустическим излучателем, общее количество активно-пассивных элементов в составе ДАР равно М).
3. Канал передачи выходных процессов электроакустических преобразователей (ЭАП) ДАР (число каналов передачи информации равно I=N+М).
4. Блок адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР.
5. Блок вычисления относительных координат элементов ДАР.
6. Блок управления характеристиками направленности (ХН).
7. Формирователь ХН с временной задержкой сигналов (ФХН).
8. Цифровое сдвигающее устройство (линия временной задержки, общее количество линий задержек равно I=N+М).
9. Сумматор напряжений.
10. Квадратор суммы напряжений.
11. Интегратор (цифровой).
12. Запоминающее устройство.
13. Блок определения среднего значения отклика обнаружителя.
14. Микропроцессорное устройство.
15. Вычитающее устройство.
16. Пороговое устройство.
17. Вычислитель порога принятия решения.
18. Индикатор.
19. Блок управления активно-пассивными элементами ДАР.
20. Пульт оператора.
Заявленное устройство содержит дискретную антенную решетку, состоящую из N пассивных элементов ДАР (1) и M активно-пассивных элементов ДАР (2), размещенных произвольным образом в заданном объеме пространства с возможностью изменения их координат в пространстве в системе координат ДАР под воздействием внешних сил, включая свободный дрейф. Соответствующие выходы элементов ДАР соединены с соответствующими входами I=Ν+M каналов передачи выходных процессов ЭАП ДАР (3). При этом N - каналы передачи информации, M - излучающие тракты. Выходы этих каналов параллельно подключены к I=Ν+M входам блока вычисления относительных координат элементов ДАР (5) и входам I=Ν+M блока адаптивной компенсации неидентичности каналов (4). Выходы блока адаптивной компенсации неидентичности каналов передачи выходных процессов ЭАП ДАР (4) подключены к соответствующим входам цифровых сдвигающих устройств (8) (цифровых линий временной задержки), выходы которых подключены к I входам сумматора напряжений (9). Выход сумматора напряжений (9) через квадратор суммы напряжений (10) подключен к входу интегратора (11). Выход интегратора (11) подсоединен к входу запоминающего устройства (12). Первый выход запоминающего устройства (12) подключен к первому входу блока определения среднего значения отклика обнаружителя (13), а второй - к первому входу вычитающего устройства (15). Выход блока определения среднего значения отклика обнаружителя (13) подключен к первому входу микропроцессорного устройства (14). Первый выход микропроцессорного устройства соединен со вторым входом вычитающего устройства (15), второй выход - со входом вычислителя порога принятия решения об обнаружении сигнала (17). Выход вычитающего устройства (15) подключен ко второму входу порогового устройства (16). Первый вход порогового устройства (16) соединен с выходом вычислителя порога принятия решения (17) об обнаружении сигнала или о наличии во входном процессе только помехи. Второй выход порогового устройства (16) подсоединен параллельно ко второму входу микропроцессорного устройства (14) и второму входу блока определения среднего значения отклика обнаружителя (13), а первый выход порогового устройства (16) подсоединен к первому входу индикатора (18). Первый и второй выходы индикатора (18) подключены ко второму входу блока управления ХН (6) и входу блока управления активно-пассивными элементами ДАР (19) соответственно. Выход блока управления активно-пассивными элементами ДАР (19) параллельно подсоединен к соответствующему входу блока вычисления относительных координат элементов ДАР (5) и к входам M каналов передачи выходных процессов активно-пассивных ЭАП (3) ДАР. Выход блока вычисления относительных координат элементов ДАР (5) соединен с первым входом блока управления ХН (6), I выходов которого соединены с управляющими входами I цифровых сдвигающих устройств (8) (линий временной задержки). Соответствующие выходы M каналов передачи выходных процессов активно-пассивных ЭАП ДАР (3) подключены к соответствующим входам M активно-пассивных ЭАП ДАР (2). Первый выход пульта оператора (20) подсоединен ко второму входу индикатора (18), третий выход которого подключен к входу пульта оператора (20), в свою очередь третий вход микропроцессорного устройства (14) подключен ко второму выходу пульта оператора (20). Остальные выходы пульта оператора (20) соединены с управляющими входами блока питания (не указанного на чертеже), каналов передачи данных, блока управления характеристиками направленности и цифровыми сдвигающими устройствами, взаимодействующими с обнаружителем устройствами для управления работой обнаружителя.
Устройство работает следующим образом.
- Включение и выключение обнаружителя осуществляется с пульта оператора (20) от блока питания, не указанного на чертеже. Оператор с помощью пульта может задать объем усредняемой выборки входных процессов обнаружителя, задать сектор обзора пространства, режим работы обнаружителя, управления режимами работы активно-пассивных ЭАП; режимами работы индикатора; задать исходные данные в микропроцессорное устройство; исключить из анализа неисправные каналы ДАР и соответствующие сдвигающие устройства в ФХН; передать результаты обнаружения сигналов и определения направления их прихода во взаимодействующие с обнаружителем устройства и оборудование.
N пассивных элементов ДАР (1), с заданными максимальными размерами ДАР, размещаются в заданном пространстве любым, известным в морской практике, способом. M активно-пассивных элементов ДАР (2) устанавливаются в два (для плоских ДАР, координаты элементов которой определяются двумя координатами Χ, Y) или в три (для объемных ДАР, координаты элементов которой определяются тремя координатами Χ, Υ, Ζ ограничиваемые размерами ДАР) угла разностороннего треугольника, с максимально возможными расстояниями между ними. Предусмотрено два режима работы устройства: «Измерение координат элементов ДАР» и «Обзор». Режимы выполняются последовательно в автоматическом режиме (исключая случай задания режима работы оператором), начиная с «Измерение координат элементов ДАР».
В первом режиме «Измерение координат элементов ДАР» выполняется цикл измерения координат ЭАП ДАР относительно центра ДАР. Для этого по команде начала работы обнаружителя или при завершении обзора исследуемого пространства, формируемой в индикаторе (18), блок управления активно-пассивными элементами ДАР (19) через M каналов передачи выходных процессов ЭАП (3), включающих кроме усилителей, полосовых фильтров, АЦП еще излучающие тракты, последовательно подает команды на излучение измерительных гидроакустических сигналов каждым активно-пассивным элементом ДАР (2). Поступающая по каналам передачи выходных процессов ЭАП ДАР (3) информация от N пассивных элементов ДАР (1) и от M активно-пассивных элементов ДАР (2), работающих в пассивном режиме, автоматически обрабатывается в блоке вычисления относительных координат элементов ДАР (5). Для этого в блоке вычисления относительных координат элементов ДАР (5) корреляционным способом последовательно измеряют время распространения измерительных сигналов от активно-пассивных элементов ДАР (2), работающих в режиме излучения, до всех остальных элементов ДАР, работающих в пассивном режиме, и рассчитывают координаты элементов путем решения уравнений окружности (для плоских ДАР) или сферических поверхностей (для объемных ДАР). В блоке управления ХН (6) измеренные относительные координаты с учетом пространственного направления обзора пространства преобразуются в число сдвигов отсчетов выборок выходных процессов каналов передачи выходных процессов ЭАП ДАР (3) относительно друг друга.
В режиме «Обзор» гидроакустические процессы, принятые пассивными элементами ДАР (1) и активно-пассивными элементами ДАР (2), работающими в пассивном режиме, по соответствующим каналам передачи выходных процессов ЭАП ДАР (3), которые выполняют предварительное усиление, фильтрацию выходных процессов ЭАП и их преобразование в цифровую форму, передаются на I входов блока адаптивной компенсации неидентичности каналов (4), I выходы которого подключены к соответствующим входам цифровых сдвигающих устройств (8) (цифровых линий временной задержки) формирователя характеристики направленности с временной задержкой сигналов (7). В цифровых сдвигающих устройствах (8) устанавливаются величины сдвига оцифрованных выходных процессов каналов передачи информации, вычисленные блоком управления ХН (6), обеспечивающие настройку устройства на заданное пространственное направление с учетом относительных координат соответствующих элементов ДАР (1, 2). Оцифрованные значения процессов с выходов I цифровых сдвигающих устройств (8) поступают на соответствующие входы сумматора напряжений (9). С выхода сумматора напряжений (9) значение мгновенной суммы I процессов поступает на квадратор суммы напряжений (10) и с его выхода значение суммарного напряжения поступает на интегратор (11). Выход интегратора (11) соединен с входом запоминающего устройства (12), в котором запоминаются значения откликов обнаружителя для всех пространственных углов обзора пространства. После завершения обзора пространства соответствующие выходные сигналы запоминающего устройства подаются на первый вход блока определения среднего значения пространственного отклика обнаружителя (13). Если сигнал не обнаружен, то с выхода блока (13) значение среднего отклика подается на первый вход микропроцессорного устройства (14), где оно запоминается. С первого выхода микропроцессорного устройства (14) оно подается на второй вход вычитающего устройства (15). Если на последующем цикле или нескольких последующих циклах обзора пространства сигнал обнаружен, то со второго выхода микропроцессорного устройства (14) на вход вычислителя порога принятия решения об обнаружении сигнала (17) поступает ранее запомненное среднее значение пространственного отклика обнаружителя на помеху. Если в процессе обнаружения сигналов изменяются статистические параметры помехи, о чем оператор может судить по результатам, отображаемым на экране индикатора (18), то оператор через пульт оператора (20) задает исходные данные в микропроцессорное устройство (14) для выбора среднего значения пространственного отклика обнаружителя соответствующего изменившейся помеховой обстановке. В качестве исходных данных могут использоваться скорость носителя (если обнаружитель расположен на борту носителя), координаты района, волнение моря, время суток и т.д. База данных средних значений отклика обнаружителя на помеху может формироваться в процессе испытаний и эксплуатации обнаружителя. Для этого оператор через пульт оператора (20) задает данные по скорости носителя (если обнаружитель расположен на его борту), волнению моря, координатам района расположения обнаружителя, времени и т.д. в микропроцессорное устройство (14) и результат оценки среднего значения пространственного отклика обнаружителя заносится в базу данных микропроцессорного устройства. Если при включении обнаружителя сигнал или сигналы, приходящие с разных пространственных направлений, обнаруживаются, начиная с первого цикла обзора пространства, то оператор через пульт оператора (20) задает исходные данные для выбора из базы данных микропроцессорного устройства соответствующей величины среднего отклика обнаружителя на помеху. Если после нескольких циклов обзора пространства, в течение которых сигнал или сигналы обнаруживались, сигнал (сигналы) не обнаруживаются, то в микропроцессорном устройстве вновь осуществляется запись среднего отклика обнаружителя на помеху. Далее алгоритм функционирования микропроцессорного устройства повторяется. Управление алгоритмами усреднения и работы микропроцессорного устройства (14) осуществляется по команде порогового устройства (16) и при необходимости управление алгоритмами работы микропроцессорного устройства (14) осуществляет оператор через пульт оператора (20). На первый вход вычитающего устройства (15) поступает результат определения среднего значения отклика обнаружителя по области обзора пространства со второго выхода запоминающего устройства (12). Разность между значениями откликов обнаружителя и средним значением его отклика на помеху поступает на соответствующие входы порогового устройства (16). Среднее значение отклика обнаружителя на помеху с соответствующего выхода микропроцессорного устройства поступает на соответствующий вход вычислителя порога принятия решения об обнаружении сигнала (17). В пороговом устройстве (16) осуществляется сравнение выходных значений вычитающего устройства (15) с пороговым значением, выработанным в вычислителе порога принятия решения об обнаружении сигнала (17). Если выходные значения вычитающего устройства (15) больше либо равны порогу принятия решения, то на вход блока определения среднего значения отклика обнаружителя (13) и микропроцессорного устройства (14) подается команда о выборе алгоритма их функционирования, а выходной процесс порогового устройства (16) подается на вход индикатора (18). С соответствующих выходов индикатора (18) сигналы о завершении цикла обзора пространства (завершения цикла обработки процессов в обнаружителе) поступают на соответствующие входы блока управления ХН (6) и блока управления активно-пассивными элементами ДАР (19). Устройство работает в режиме «Обзор» до истечения интервала времени, в течение которого осуществляется обзор пространства в заданном секторе пространственных углов и обработки входных процессов обнаружителя. После завершения цикла обзора пространства или числа циклов обзора пространства, заданного оператором, через пульт оператора (20) со второго выхода индикатора (18) на вход блока управления активно-пассивными элементами ДАР (19) поступает команда на включение режима работы «Измерение координат элементов ДАР в системе координат ДАР».
Технический результат изобретения заключается в создании нового устройства для обнаружения сигналов и определения направления на их источник (источники) с числом нелинейных операций, равным 2. В этом устройстве отклик обнаружителя формируется в результате обработки гарантированно идентичных выходных процессов электроакустических преобразователей ДАР без влияния на него среднего значения пространственного отклика обнаружителя на помеху с учетом возможности перемещения в пространстве элементов дискретной антенной решетки под воздействием внешних сил. Заявленное устройство позволяет производить обнаружение и определение направления на источник (источники) сигналов при больших отношениях сигнала к помехе с эффективностью обнаружения и определения направления на их источник не хуже чем эффективность аналогов или прототипа. При малых отношениях сигнала к помехе на входе обнаружителя его эффективность больше, чем эффективность аналогов и прототипа.
Заявленное устройство промышленно применимо, так как при его изготовлении могут быть использованы широко распространенные устройства и компоненты, такие как: приемники акустических сигналов, аналоговые усилители и фильтры, аналого-цифровые преобразователи, цифровые устройства памяти с произвольным доступом, цифровые процессоры обработки процессов и микропроцессоры, выпускаемые серийно отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2013 |
|
RU2523095C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2012 |
|
RU2499276C1 |
| КОРРЕЛЯЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2012 |
|
RU2501030C2 |
| УСТРОЙСТВО С КОРРЕЛЯЦИОННЫМ ФОРМИРОВАТЕЛЕМ ХАРАКТЕРИСТИКИ НАПРАВЛЕННОСТИ ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2005 |
|
RU2305297C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ КРИВИЗНЫ ФРОНТА ВОЛНЫ | 2010 |
|
RU2431153C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2098297C1 |
| Эхолот | 2019 |
|
RU2719210C1 |
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2037842C1 |

Представлено устройство для обнаружения сигналов и определения направления на их источник. Технический результат изобретения заключается в создании нового устройства для обнаружения сигналов и определения направления на их источник (источники) с числом нелинейных операций в тракте обработки, равным 2. В этом устройстве отклик обнаружителя формируется в результате обработки гарантированно идентичных выходных процессов электроакустических преобразователей ДАР без влияния на него среднего значения пространственного отклика обнаружителя на помеху с учетом возможности перемещения в пространстве элементов дискретной антенной решетки под воздействием внешних сил. Для этого обнаружитель содержит выполненную определенным образом дискретную антенную решетку (ДАР), включающую N ненаправленных пассивных и M активно-пассивных электроакустических преобразователей (ЭАП), соответствующих им I каналов передачи информации, блок вычисления относительных координат элементов ДАР, блок управления характеристиками направленности, пороговое устройство, вычислитель порога принятия решения, индикатор, блок управления активно-пассивными элементами ДАР, пульт оператора, а также формирователь характеристик направленности с временной задержкой сигналов. Принципиальным отличием заявленного устройства от прототипа является то, что обнаружитель дополнительно содержит блок адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР, позволяющий получить идентичные параметры всех выходных процессов электроакустических преобразователей ДАР, что является обязательным условием для увеличения вероятности первичного обнаружения сигналов и уменьшения вероятности пропуска «слабых» сигналов. 1 ил.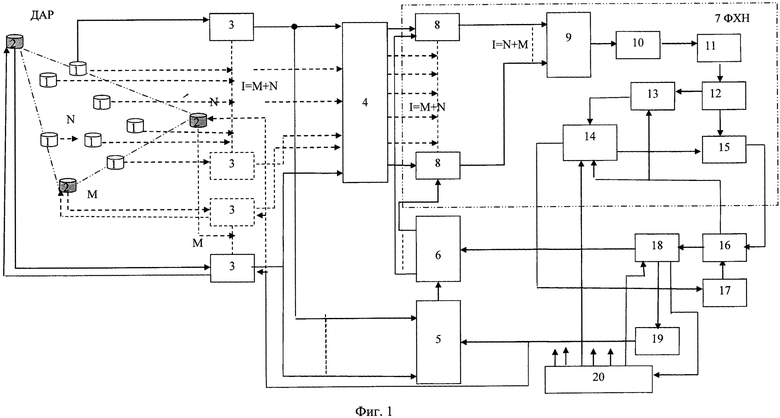
Устройство для обнаружения сигналов и определения направления на их источник, содержащее дискретную антенную решетку (ДАР), включающую N ненаправленных пассивных и М активно-пассивных элементов и соответствующих им I, равных N+M, каналов передачи выходных процессов электроакустических преобразователей ДАР, блок вычисления относительных координат элементов ДАР, блок управления характеристиками направленности, пороговое устройство, вычислитель порога принятия решения, индикатор, блок управления активно-пассивными элементами ДАР, пульт оператора, а также формирователь характеристик направленности с временной задержкой сигналов, содержащий I цифровых сдвигающих устройств, сумматор напряжений, квадратор суммы напряжений, интегратор, запоминающее устройство, блок определения среднего значения отклика обнаружителя, микропроцессорное устройство, вычитающее устройство; при этом соответствующие выходы I каналов передачи выходных процессов ЭАП ДАР параллельно подключены к I входам блока вычисления относительных координат элементов ДАР; выходы соответствующих цифровых сдвигающих устройств подключены к соответствующим I входам сумматора напряжений, а выход сумматора напряжений через квадратор суммы напряжений подключен к входу интегратора, выход которого подключен к входу запоминающего устройства; в свою очередь первый выход запоминающего устройства соединен с первым входом блока определения среднего значения отклика обнаружителя, а второй выход - с первым входом вычитающего устройства, выход которого подключен ко второму входу порогового устройства; второй выход порогового устройства соединен со вторым входом блока определения среднего значения отклика обнаружителя; причем первый вход порогового устройства соединен с выходом вычислителя порога принятия решения, а первый выход порогового устройства подсоединен к первому входу индикатора, первый и второй выходы которого соединены со вторым входом блока управления характеристиками направленности и входом блока управления активно-пассивными элементами ДАР соответственно; в свою очередь выход блока управления активно-пассивными элементами ДАР параллельно подключен к соответствующему входу блока вычисления относительных координат элементов ДАР и к входам М каналов передачи выходных процессов активно-пассивных ЭАП ДАР, выход блока вычисления относительных координат элементов ДАР соединен с первым входом блока управления характеристиками направленности, I выходов которого соединены с управляющими входами I цифровых сдвигающих устройств; первый выход микропроцессорного устройства соединен со вторым входом вычитающего устройства, а второй выход - с входом вычислителя порога принятия решения; входы микропроцессорного устройства соединены соответственно с выходом блока определения среднего значения отклика обнаружителя, вторым выходом порогового устройства и вторым выходом пульта оператора, первый выход пульта оператора соединен со вторым входом индикатора, третий выход которого подключен к входу пульта оператора, а остальные выходы пульта оператора соединены с управляющими входами блока питания, каналов передачи данных выходных процессов ЭАП ДАР, блока управления характеристиками направленности и цифровыми сдвигающими устройствами, отличающееся тем, что устройство дополнительно содержит блок адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР, при этом выходы каналов передачи выходных процессов N ненаправленных пассивных и М активно-пассивных элементов ДАР подсоединены к соответствующим входам блока адаптивной компенсации неидентичности каналов передачи выходных процессов электроакустических преобразователей ДАР, выходы которого подсоединены к входам I цифровых сдвигающих устройств формирователя характеристик направленности.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2013 |
|
RU2523095C1 |
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ СИГНАЛОВ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИХ ИСТОЧНИК | 2012 |
|
RU2499276C1 |
| КОРРЕЛЯЦИОННЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 2012 |
|
RU2501030C2 |
| Резец | 1939 |
|
SU63550A1 |
| US3462590 A1, 19.08.1969. | |||

