Изобретение относится к машиностроению и может быть использовано в приводах машин и механизмов, особенно в автомобилях в качестве механической бесступенчатой передачи. Известна механическая бесступенчатая передача, содержащая соосно расположенные в корпусе ведущий и. ведомый валы, размещенный на ведущем валу эксцентрик, механизм изменения эксцентриситета и преобразующие механизмы, снабжена охватывающим эксцентрик полым промежуточным валом, на наружной поверхности которого жестко укреплен ведущий элемент по крайней мере одного преобразующего механизма связаны по одному с корпусом и(или) с ведомым валом.
Недостатком известной передачи является то, что она сочетает в себе наличие зубчатых колес, упругих элементов, кривошип, шарниры, что требует мощных опор валов, так как они значительно отстоят друг от друга, а это сдерживает ее применение на высоких разнопеременных оборотах, например, от автомобильного двигателя, так как в этом случае, неизбежен ее малый ресурс.
Поставленная задача изобретения - отказаться от усложненной по возможности динамики взаимодействия элементов всего набора деталей механической бесступенчатой передачи, одновременно преследуя цель уменьшения габаритов, (металлоемкости), хорошую адаптивность к разнопеременным оборотам, как повышения ресурса эксплуатации, так и порога применения, а так же упростить технологию ее производства. Указанная цель достигается тем, что передача содержит ведущий вал с раструбом на торце и прорезями в нем для размещения круглых тел, а ведомый вал, имея на торце промежуточное звено с профильными лысками, введен в раструб. Оси валов на одном уровне, но несколько смещены и параллельны, установлены на подшипники в частях корпуса. В свою очередь раструб с круглыми телами заключен в обойму, которая удерживается подшипниками в обечайке-маятнике, подвешенной на пальце, заключенном в частях корпуса. В нижней части обечайки-маятника имеются гребни взаимодействия с червяком, расположенном в корпусе. Допускается и использование эксцентрика вместо червяка. Для управления передачей применена синхронно-адаптивная схема, в которой, обобщены самостоятельные рычажные системы, как-то: червячный (или эксцентриковый) механизм, пантограф, педаль с рычагом и аналог рычажного фиксируемого устройства стояночного тормоза автомобиля.
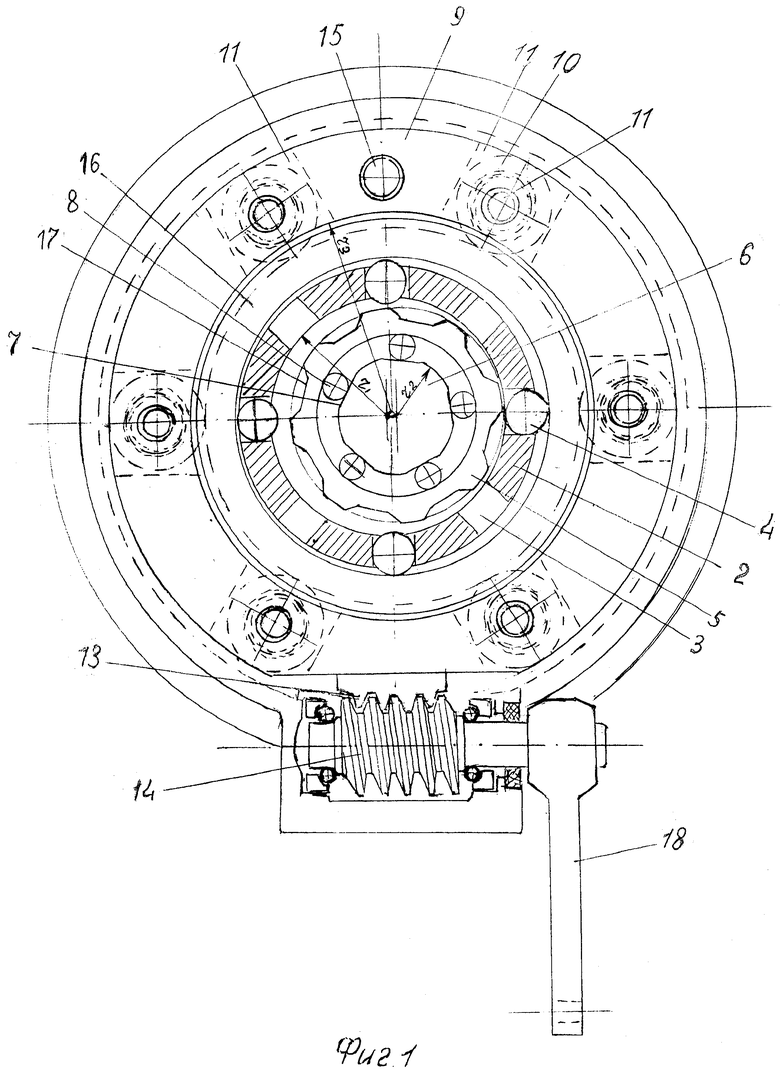
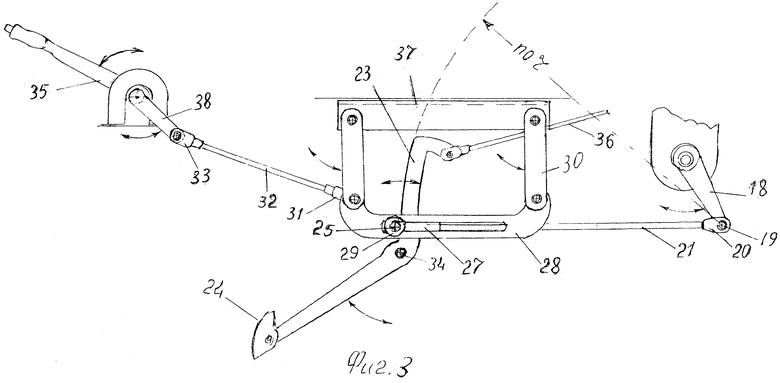
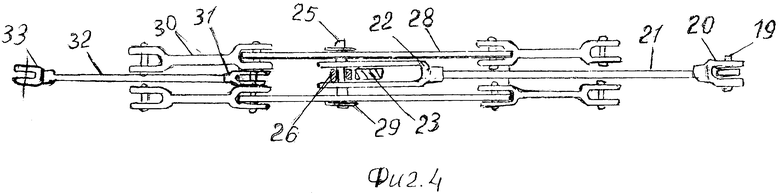
На фиг.1 изображена передача с элементами взаимодействия (поперечный разрез). На фиг.2 - то же, но в продольном разрезе. На фиг.3 изображена синхронно-адаптивная схема управления механической бесступенчатой передачей. На фиг.4 - вид снизу на сдвоенный пантограф.
Ведущий вал - 1 (фиг.2) с торцевым раструбом - 2 и прорезями - 3 для роликов - 4 совмещен через раструб - 2 с промежуточным звеном - 5, имеющим профильные лыски - 17, торца ведомого вала - 6 сочлененного (шлицевым) или инерционным способом через лыски - 7 на торце и роликами - 8. Подвешенная на пальце - 15 обечайка-маятник -9 с установленными подшипниками - 10 (с повышенной прочностью наружных обойм) в проемах - 11 на осях - 12. имеет гребни - 13 для контакта с червяком - 14, контактирует через подшипники - 10 с обоймой - 16 с буртиками. Обойма - 16 охватывает раструб - 2 с роликами - 4. На фиг.1 обозначены, исходящие от осей, стрелки радиусов: для ведущего вала - 1 как r1, для ведомого вала - 6 как r2 и для нейтрального положения обечайки-маятника - r3.
На фиг.3 изображено устройство синхронно-адаптивной схемы управления механической бесступенчатой передачи:
Рычаг - 18 проворота червяка соединен через палец - 19 с проушиной - 20 тяги - 21, соединенной с проушиной - 22, накинутой на рычаг - 23 с осевым отверстием - 34 и педалью - 24. После чего в проушину - 22 установлен палец - 25 и в гулка - 26. Палец - 25 имеет достаточную длину для прохождения вырезов - 27, щечек - 28 пантографа, имея торцевые ограничения в виде фиксированных шайб - 29. Шарнирно щечки - 28 соединены со звеньями - 30 пантографа и имеют с одной стороны общее пальчиковое соединение и с проушиной - 31. соединенной с тягой - 32, которая через проушину - 33 пальцем соединена с рычагом - 38 прототипа фиксирующего устройства рычага стояночного тормоза автомобиля - 35. Соединение тяги - 36 с рычагом - 23 предназначено для управления дроссельными заслонками двигателя; 37 - базовый швеллер пантографа. На фиг.4 - вид снизу на основание пантографа дает представление о расположении соединений тяг - 32:21; рычага - 23, звеньев - 30, щечек - 28, проушины - 20, пальца - 25, шайбы - 29.
РАБОТА МЕХАНИЧЕСКОЙ БЕССТУПЕНЧАТОЙ ПЕРЕДАЧИ
Вращающийся раструб - 2 торца ведущего вала - 1 увлекает ролики - 4 и они от центробежной силы расходятся в прорезях - 3, прижимаясь к обойме - 16. Обойма - 16 может вращаться вместе с ними, опираясь на подшипники - 10, встроенные в обечайку-маятник - 9, в прорези - 11. Сама обечайка-маятник - 9, подвешенная в корпусе на пальце - 15 может смещаться в поперечном направлении осей валов - 1 и 6. В корпусе передачи встроен червяк - 14, который находится в непосредственном контакте с гребнями - 13 обечайки-маятника - 9. Проворачиваемый рычагом - 18, червяк - 14 сдвигает обечайку-маятник - 9, а она увлекает обойму - 16, которая смещает орбиту роликов - 4, и они начинают поочередно западать в профильные лыски - 17 промежуточного звена - 5. От величины режима смещения орбиты зависит погружение роликов - 4, а это определяет протяженность их контакта с промежуточным звеном - 5. В соответствии с этим происходит сподвижка промежуточного звена - 5, от которого вращение через инерционное соединение с роликами - 8 передается ведомом} валу - 6 с лысками - 7. Альтернативой инерционному соединению не исключается применение более жесткого шлицевого. Для выбора нужной частоты вращения необходимо корректирующее устройство (фиг.3, 4,), которым является синхронно-адаптивная схема управления, объединившая функции разных самостоятельных рычажных систем. С помощью пантографа, базированного на швеллере - 37 с рычажным устройством - 35 и через тягу - 32, и проушины - 31, смещаются с помощью звеньев пантографа - 30, направляющие щечки - 28 и одновременно палец - 25 с проушиной - 27 тяги - 21 от оси 34, педального рычага - 23. Так подготавливается режим для получения нужных частот силового вращения вала. Теперь, если нажать на педаль - 24, то рычаг - 18 провернет червяк - 14 (фиг.1) на определенный угол, это и будет заданная величина погружения роликов - 4 (фиг.1) в промежуточное звено - 5 (фиг.1), что будет соответствовать определенной частоте вращения ведомого вала - 6 (фиг.1). Одновременно, если мы имеет дело с автомобильным двигателем, то через тягу - 36, по желанию, получим увеличение его оборотов до максимума независимо от того, на каком уровне находится палец - 25 от оси - 34 педального рычага - 23. Устранив нажатие на педаль - 24, получим немедленно нейтральное положение (за счет подпружининой тяги - 36) ведомого вала - 6.
Таким образом, можно как угодно влиять на работу бесступенчатой передачи, задавая скоростные режимы, и при этом, сохраняя неограниченное управление дроссельными заслонками двигателя через тягу - 36, и выдерживать избранную частоту вращения ведомого вала, сопоставимую с оборотами ведущего вала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2000 |
|
RU2179674C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1995 |
|
RU2091637C1 |
| Двухпоточная бесступенчатая коробка передач | 1981 |
|
SU1229483A1 |
| МЕХАНИЧЕСКАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1990 |
|
RU2018746C1 |
| Механическая бесступенчатая передача | 1986 |
|
SU1352124A1 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2240455C2 |
| БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2005 |
|
RU2298714C2 |
| ИМПУЛЬСНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 2002 |
|
RU2240456C2 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2003 |
|
RU2247884C1 |
| АВТОМАТИЧЕСКАЯ БЕССТУПЕНЧАТАЯ МЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 1997 |
|
RU2109188C1 |
Изобретение относится к механической бесступенчатой передаче и ее способу управления. Механическая бесступенчатая передача содержит соосно расположенные в корпусе ведущий и ведомый валы, размещенный на ведущем валу эксцентрик, охваченный полым промежуточным валом, на наружной поверхности которого жестко укреплен ведущий элемент одного преобразующего механизма. Ведомые элементы связаны по одному с корпусом и/или с ведомым валом. Причем передача имеет ведомый вал и его торцевая часть с промежуточным звеном с профильными лысками свободно помещена в раструб ведущего вала с прорезями для размещения круглых тел. При вращении они от центробежной силы расходятся и принимают орбиту, ограниченную обоймой и возможностью фиксации задаваемых смещений в поперечном направлении принудительно с помощью имеющихся гребней, контактирующих с червяком, сдвигая орбиту из круглых тел, вводя их поочередно в контакт с профильными лысками промежуточного звена. Способ управления заключается в избирательной фиксации частот вращения с применением синхронно-адаптивной схемы; при нажатии на педаль рычаг повернет рычаг на заданный угол для погружения роликов в промежуточное звено на соотносимую величину, что будет соответствовать определенной частоте вращения ведомого вала и передачи момента. Синхронно-адаптивная схема позволяет скоординированно объединить группу рычажных устройств. Достигаются компактность и повышение ресурса устройства. 3 н.п. ф-лы, 4 ил.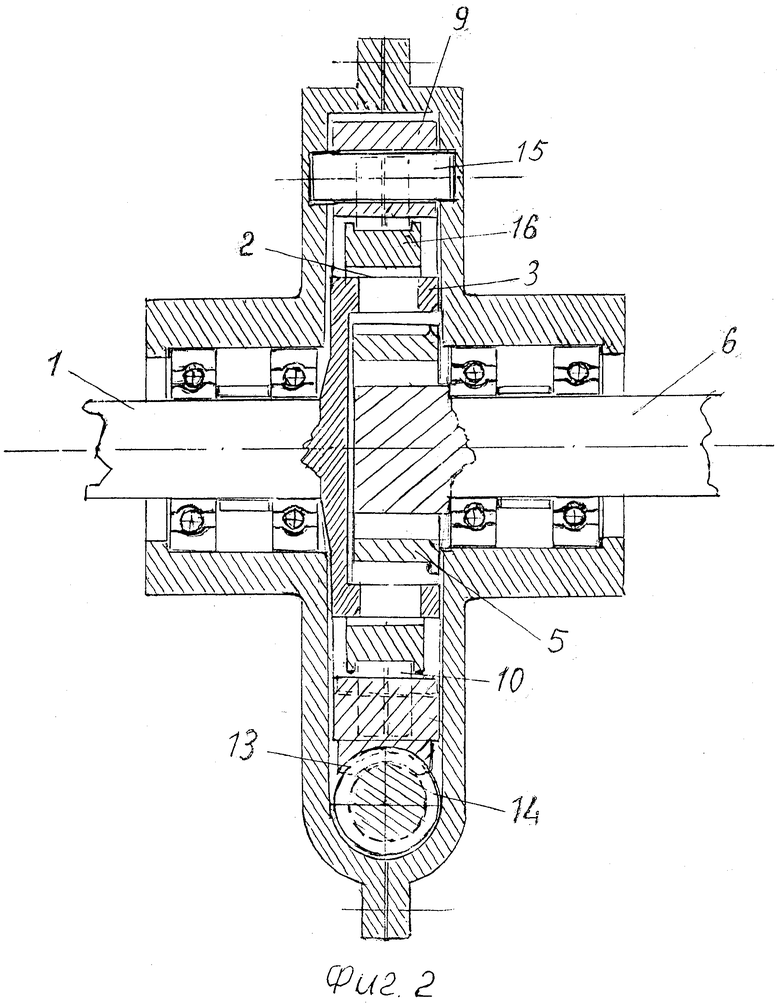
1. Механическая бесступенчатая передача, содержащая соосно расположенные в корпусе ведущий и ведомый валы, размещенный на ведущем валу эксцентрик, охваченный полым промежуточным валом, на наружной поверхности которого жестко укреплен ведущий элемент по крайней мере одного преобразующего механизма, а ведомые элементы связаны по одному с корпусом и/или с ведомым валом, отличающаяся тем, что механическая бесступенчатая передача имеет ведомый вал, параллельно отстоящий от оси ведущего вала, и его торцевая часть с промежуточным звеном с профильными лысками свободно помещена в раструб ведущего вала с прорезями для размещения круглых тел, при вращении которого они от центробежной силы расходятся и принимают орбиту, ограниченную обоймой (кольцом), заключенной в подвешенной, в частях корпуса, на ось обечайки-маятника с подшипниками и возможностью фиксации задаваемых смещений в поперечном направлении принудительно с помощью имеющихся гребней, контактирующих с червяком, сдвигая орбиту из круглых тел, вводя их поочередно в контакт с профильными лысками промежуточного звена, тем самым передавая ему момент и частоту вращения через инерционно-сопряженному (или шлицевым способом) с ним ведомому валу.
2. Способ управления механической бесступенчатой передачей заключается в избирательной фиксации частот вращения с применением синхронно-адаптивной схемы, включающей пантограф, базированный на швеллере с рычажным устройством; через тягу и проушины смещают звенья пантографа с направляющими щечками и одновременно палец с проушиной тяги от оси педального рычага; при нажатии на педаль рычаг повернет рычаг на заданный угол для погружения роликов (круглых тел) в промежуточное звено на соотносимую величину, что будет соответствовать определенной частоте вращения ведомого вала и передачи момента.
3. Синхронно-адаптивная схема позволяет скоординировано объединить группу рычажных устройств так: рычаг проворота червяка соединен через палец с проушиной тяги, соединенной с проушиной, накинутой на рычаг с осевым отверстием и педалью; в проушину установлены палец и втулка, палец имеет достаточную длину для прохождения вырезов щечек пантографа, имея торцевые ограничения в виде фиксированных шайб, шарнирно соединенные щечки звеньев пантографа имеют и общее пальчиковое соединение с проушиной тяги, которая соединена через проушину с фиксирующим устройством, а педальный рычаг присоединен к тяге управления дроссельными заслонками двигателя.
| Механическая бесступенчатая передача | 1980 |
|
SU977885A1 |
| ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 1991 |
|
RU2029168C1 |
| МЕХАНИЧЕСКИ УПРАВЛЯЕМАЯ БЕССТУПЕНЧАТАЯ АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 2004 |
|
RU2350803C2 |
| US 6231468 B1, 15.05.2001. | |||

