Настоящее изобретение относится к педальному механизму для торможения и руления-посредством-торможения для тракторов.
Как известно, обычные тракторы оборудованы педальным механизмом для торможения и руления-посредством-торможения, содержащим две тормозные педали, обеспечивающие так называемую функцию руления-посредством-торможения (SBF).
В таком типе тормозного педального механизма, если водитель нажимает только левую (или правую) педаль, тормозная система тормозит только заднее левое (или правое) колесо, сокращая, таким образом, радиус поворота трактора, особенно во время маневров на поворотной полосе.
В настоящее время для двух тормозных педалей есть просто-напросто управляемое водителем механическое стопорное устройство для соединения полностью педалей во время использования на дороге, или когда SBF не требуется.
Механический стопор следует всегда использовать при движении на дороге для защиты от неосторожного нажатия водителем только одной из двух педалей, когда трактор движется с высокой скоростью, приводящего, соответственно, к резкому отклонению от прямого пути или возможному опрокидыванию транспортного средства.
При движении на дороге две тормозные педали полностью соединены стопорным устройством и могут нажиматься только одновременно для замедления или остановки транспортного средства в целом.
Однако это решение имеет два основных недостатка:
1) водитель может пренебрегать приведением в действие стопорного устройства для соединения полностью двух тормозных педалей перед тем, как транспортное средства наберет скорость, приводя, таким образом, как указано, к высокоопасным ситуациям в случае экстренного торможения (отклонению от прямого пути транспортного средства на высокой скорости, если нажата только одна педаль);
2) при использовании настоящих систем функция руления-посредством-торможения (SBF) не может быть эффективно применена к электронным (например, ABS) тормозным системам.
Кроме того, в современных SBF системах каждая педаль имеет соответствующий главный цилиндр, поэтому гидравлические контуры двух главных цилиндров должны быть соединены с помощью компенсационного клапана для компенсации любой разницы в давлении между двумя гидравлическими контурами при торможении трактора в обычных условиях; причем все это серьезно усложняет гидравлические контуры тормозной системы трактора.
Поэтому основная задача настоящего изобретения заключается в создании педального механизма для трактора, выполненного с возможностью устранения вышеупомянутых недостатков, который в то же самое время является недорогим и легким для производства.
Дополнительная задача настоящего изобретения заключается в создании тормозной системы с электронным управлением, в частности ABS, содержащей, по меньшей мере, один новаторский педальный механизм для трактора.
Согласно настоящему изобретению создан педальный механизм для трактора, как заявлено в прилагаемой формуле изобретения.
Неограничивающий вариант осуществления настоящего изобретения будет описан для примера со ссылкой на прилагаемые чертежи, на которых:
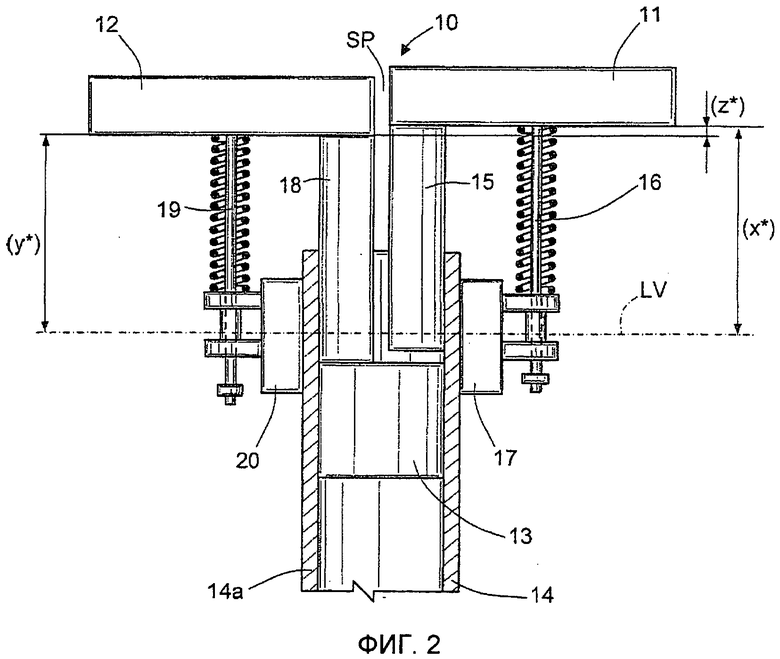
фиг. 1 - продольный разрез педального механизма согласно настоящему изобретению в первом исходном положении;
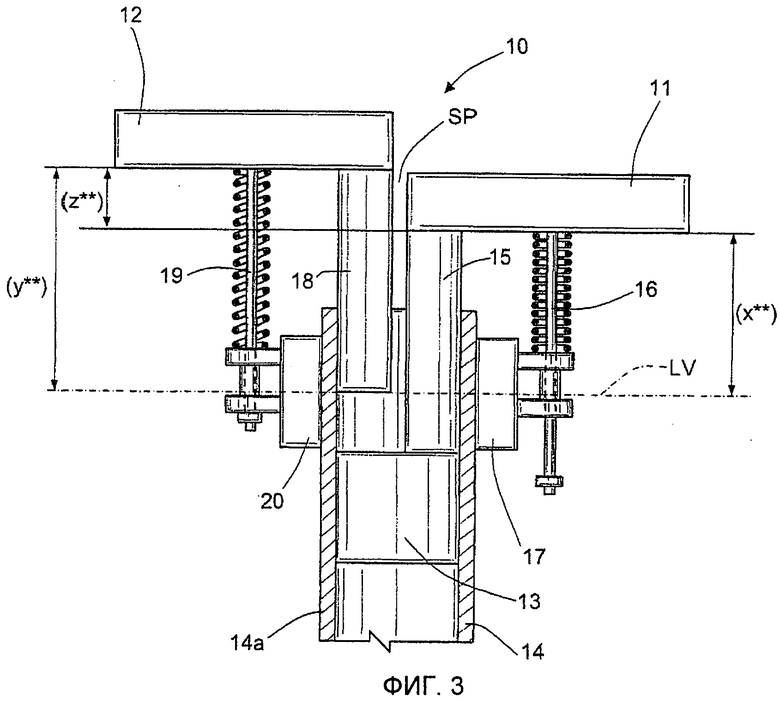
фиг. 2 - продольный разрез педального механизма с фиг. 1 во втором положении нормального торможения; и
фиг. 3 - продольный разрез педального механизма с фиг. 1 и 2 в третьем положении с включенной функцией руления-посредством-торможения (SBF).
Как показано на фиг. 1, педальный механизм 10 согласно настоящему изобретению содержит правую педаль 11 и левую педаль 12, которые действуют (синхронно или асинхронно) на единственный главный цилиндр 13, размещенный с возможностью скольжения внутри цилиндрической направляющей 14.
Педали 11, 12 расположены на противоположных сторонах продольной оси симметрии (AX) педального механизма 10 в целом.
Правая педаль 11 соединена механически с главным цилиндром 13 соответствующим толкающим стержнем 15, направляемого, по меньшей мере, частично, а также с возможностью скольжения внутри цилиндрической направляющей 14 главного цилиндра 13.
В исходном положении, показанном на фиг. 1, нижняя поверхность 15a толкающего стержня 15 опирается на верхнюю поверхность 13a главного цилиндра 13.
В исходном положении согласно фиг. 1 верхняя поверхность 13a главного цилиндра 13 также выровнена с фиксированной опорной линией LV.
Правая педаль 11 снабжена управляющим стержнем 16 для управления соответствующим правым потенциометром 17.
При фактическом использовании управляющий стержень 16, управляющий потенциометром 17, скользит внутри втулки 16a, выполненной за одно целое с потенциометром 17 при помощи двух опор 16b, 16c с отверстиями. Первый конец 16* управляющего стержня 16 прикреплен к педали 11, а второй конец 16** снабжен, с помощью не показанного известного средства, пружинной шайбой RD.
Управляющий стержень 16 вставлен внутри соответствующей винтовой пружины SP1, расположенной между педалью 11 и опорой 16b и возвращающей педаль 11 в положение по фиг. 1, когда водителем прикладывается давление ногой и затем убирается с педали 11.
Подобным образом левая педаль 12 соединена механически с главным цилиндром 13 с помощью соответствующего толкающего стержня 18, также направляемого, по меньшей мере, частично, внутри цилиндрической направляющей 14.
В исходном положении, показанном на фиг. 1, нижняя поверхность 18a толкающего стержня 18 опирается на верхнюю поверхность 13a главного цилиндра 13.
Вдоль оси (AX) между двумя педалями 11, 12 оставлен промежуток SP.
Левая педаль 12 снабжена управляющим стержнем 19 для управления соответствующим левым потенциометром 20.
При фактическом использовании управляющий стержень 19, управляющий потенциометром 20, скользит внутри втулки 19a, выполненной за одно целое с потенциометром 20 при помощи двух опор 19b, 19c с отверстиями. Первый конец 19* управляющего стержня 19 прикреплен к педали 12, а второй конец 19** снабжен, с помощью непоказанного известного средства, пружинной шайбой RD.
Управляющий стержень 19 вставлен внутри соответствующей винтовой пружины SP2, расположенной между педалью 12 и опорой 19b и возвращающей педаль 12 в положение по фиг. 1, когда водителем прикладывается давление ногой и затем убирается с педали 12.
В варианте осуществления, показанном на прилагаемых чертежах два потенциометра 17, 20 прикреплены к внешней поверхности цилиндрической направляющей 14.
Как будет ясно специалисту в данной области техники, потенциометры 17, 20 можно заменять любым другим механическим, электромеханическим или электронным устройством, обеспечивающим определение в определенный момент положения педалей 11 и 12, или расстояния между ними, или расстояния между ними и фиксированной опорной линией LV.
Как указано, потенциометры 17 и 20 определяют расстояние (X) правой педали 11 и расстояние (Y) левой педали 12 от фиксированной опорной линии LV, соответственно.
Величины расстояний (X) и (Y) передаются в форме сигнала электронному центральному блоку CL управления, который обрабатывает входящие данные и осуществляет стратегии управления, чтобы при помощи них управлять гидравлическим контуром (не показан) главного цилиндра 13 (см. ниже).
Как показано на фиг. 2, главный цилиндр 13 может приводиться в действие обеими педалями 11, 12 педального механизма 10; причем в таком случае выполняется только обычное торможение, например, четырех ведущих колес (не показаны) трактора. Поэтому в положении согласно фиг. 2 функция SBF не используется.
Как показано на фиг. 2, при торможении обычным образом (т.е. когда функция SBF, как указано, не используется) расстояния между педалями 11, 12 и фиксированной опорной линией LV изменяются (сейчас (X*) и (Y*) соответственно), но не в одинаковой мере.
Другими словами, поскольку водителю практически невозможно нажимать обе педали 11, 12 одинаковым образом и с одинаковой силой, величина (X*) при торможении трактора обычным образом никогда не будет, как правило, точно равна (Y*).
Электронная система управления (соединенная с электронным центральным блоком CL управления), тем не менее, допускает небольшую разницу (Z*) между двумя расстояниями (Y*) и (X*) и по-прежнему интерпретирует сигнал, как указание на намерение водителя затормозить обычным образом (т.е. с отключенной функцией SBF).
Однако, как показано на фиг. 3, если разница между расстояниями (X**) и (Y**) увеличивается сверх заданной пороговой величины, электронная система интерпретирует это как намерение водителя повернуть направо, например, как показано по существу на фиг. 3 (разница может быть положительной или отрицательной; в конфигурации согласно фиг. 3 она является отрицательной, поскольку величина (Y**) больше, чем (X**)).
То же самое применимо, когда водитель поворачивает налево, поскольку в этом случае разница между величиной (X) и (Y) является положительной.
Для повышения безопасности управления может, преимущественно, хотя и не обязательно, введено требование на педаль, в том смысле, что для приведения в действие функции руления-посредством-торможения (SBF) не только расстояние между педалями 11 и 12 должно превышать пороговую величину, но и педаль, не вовлеченная в операцию управления, должна также находиться в исходном положении, показанном на фиг. 1.
Также может быть осуществлена другая функция, благодаря чему функция SBF выводится из строя автоматически, когда скорость трактора превышает заданную пороговую величину.
Основные преимущества настоящего изобретения состоят в следующем:
оно решает проблему пренебрежения водителем соединения полностью двух тормозных педалей до того, как транспортное средство достигнет высокой скорости;
оно предусматривает применение функции руление-посредством-торможения (SBF) к электронным (например, ABS) тормозным системам; и
один главный цилиндр обслуживает как тормозную педаль, так и педаль для руления-посредством-торможения.
Группа изобретений относится к области управления транспортным средством. Педальный механизм для торможения и руления-посредством-торможения для тракторов содержит работающие синхронно или асинхронно правую педаль и левую педаль и, по меньшей мере, один гидравлический или пневматический контур, соединенный с исполнительным средством, приводимым в действие, по меньшей мере, одной из упомянутых педалей. Исполнительное средство содержит только один главный цилиндр и содержит обнаруживающее средство, соединенное при помощи электронных устройств с электронным центральным блоком управления. Обнаруживающее средство определяет расстояние между педалями, а электронный центральный блок управления определяет на основе принятых от обнаруживающего средства данных, следует ли приводить в действие функцию руления-посредством-торможения. Тормозная система с электронным управлением, в частности система AВS, может содержать вышеуказанный педальный механизм. Решение направлено на повышение безопасности управления транспортным средством. 2 н. и 6 з.п. ф-лы, 3 ил.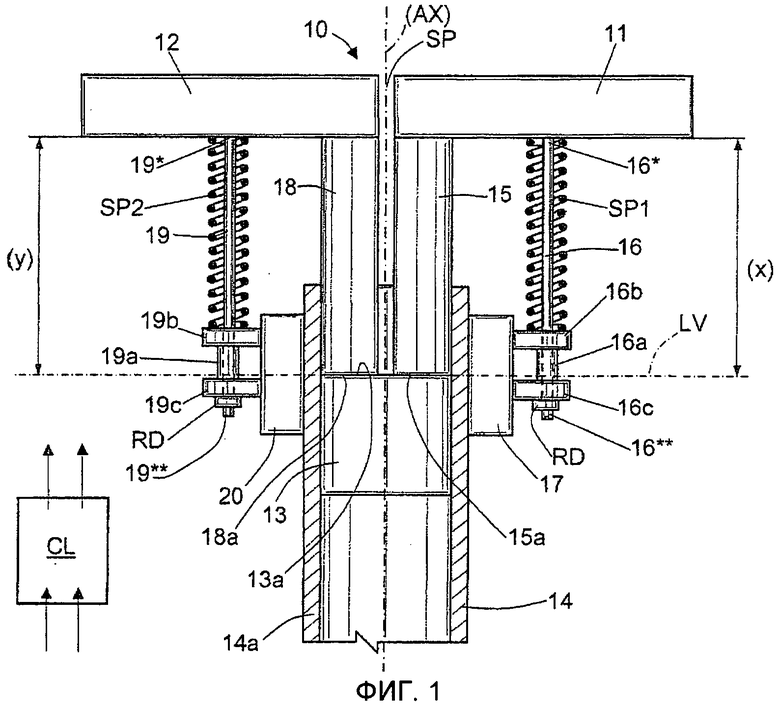
1. Педальный механизм для торможения и руления-посредством-торможения для тракторов, содержащий:
правую педаль и левую педаль, работающие синхронно или асинхронно; и, по меньшей мере, один гидравлический или пневматический контур, соединенный с исполнительным средством, приводимым в действие, по меньшей мере, одной из упомянутых педалей, отличающийся тем, что исполнительное средство содержит только один главный цилиндр и содержит обнаруживающее средство, соединенное при помощи электронных устройств с электронным центральным блоком управления;
при этом обнаруживающее средство определяет расстояние между педалями; а электронный центральный блок управления определяет на основе принятых от обнаруживающего средства данных, следует ли приводить или нет в действие функцию руления-посредством-торможения.
2. Педальный механизм по п.1, отличающийся тем, что обнаруживающее средство дополнительно определяет расстояния педалей от фиксированной опорной линии.
3. Педальный механизм по п.2, отличающийся тем, что если водителем одновременно нажаты две педали ниже заданной разницы между двумя расстояниями двух педалей от фиксированной опорной линии, то электронный центральный блок управления приводит в действие обычную функцию торможения.
4. Педальный механизм по п.2, отличающийся тем, что при превышении заданной разницы между двумя расстояниями двух педалей от фиксированной опорной линии электронный центральный блок управления приводит в действие функцию руления-посредством-торможения в одном из двух направлений.
5. Педальный механизм по п.4, отличающийся тем, что для действительного приведения в действие функции руления-посредством-торможения электронный центральный блок управления определяет, что педаль, не вовлеченная в операцию руления, находится в исходном положении.
6. Педальный механизм по п.1, отличающийся тем, что обнаруживающее средство содержит, по меньшей мере, потенциометр.
7. Педальный механизм по п.1, отличающийся тем, что обнаруживающее средство содержит любое механическое, электромеханическое или электронное устройство, выполненное с возможностью определения мгновенного положения двух педалей, или расстояния между ними, или расстояния между ними и опорной линией.
8. Тормозная система с электронным управлением, в частности система ABS, отличающаяся тем, что она содержит, по меньшей мере, один педальный механизм, содержащий:
правую педаль и левую педаль, работающие синхронно или асинхронно; и, по меньшей мере, один гидравлический или пневматический контур, соединенный с исполнительным средством, приводимым в действие, по меньшей мере, одной из упомянутых педалей, причем исполнительное средство содержит только один главный цилиндр и содержит обнаруживающее средство, соединенное при помощи электронных устройств с электронным центральным блоком управления; при этом обнаруживающее средство определяет расстояние между педалями; а электронный центральный блок управления определяет на основе принятых от обнаруживающего средства данных, следует ли приводить или нет в действие функцию руления-посредством-торможения.
| ХОЛОДИЛЬНЫЙ ШКАФ С БАРЬЕРАМИ ДЛЯ УДЕРЖИВАНИЯ ВОЗДУХА | 2010 |
|
RU2523063C2 |
| DE 3135174 A1, 17.03.1983 | |||
| СКВАЖИНА-УТИЛИЗАТОР | 2013 |
|
RU2544196C1 |
| JP 2006089034 A, 06.04.2006 | |||
| Устройство комбинированного поворота транспортного средства | 1989 |
|
SU1676906A1 |
| Устройство для управления механизмами поворота и тормозами гусеничной машины с разделением потока мощности | 1973 |
|
SU485022A2 |

