Настоящее изобретение в основном имеет отношение к сфере освоения космического пространства, а более конкретно к устройству захвата объектов, находящихся в состоянии свободного полета в космосе, в соответствии с пунктом 1 формулы изобретения.
Более конкретно, настоящее изобретение относится к устройствам захвата, предназначенных для захвата объектов, находящихся в космосе в состоянии свободного полета, устанавливаемым на борту космических аппаратов, таких как, например, космический корабль.
Известные устройства захвата представляют собой сложные механические конструкции, такие как, например, роботизированные системы, имеющие в своем составе устройства типа механическая рука, управляемые с космического корабля, на борту которого они установлены.
Однако известные устройства имеют определенные недостатки.
В основном, такие устройства обладают большой массой, значительными размерами и чрезвычайно высокой сложностью. Данное обстоятельство особо существенно для прикладных применений в области освоения космического пространства, где увеличение массы по отношению к грузоподъемности приводит к увеличению затрат и где имеющийся объем на борту в общем случае является критическим параметром.
Следующий недостаток известных устройств захвата связан с тем фактом, что они в общем случае имеют в своем составе большое количество электромеханических устройств и сложных электронных модулей, что усложняет конструкцию и управление ею в целом, а следовательно, ведет к снижению ее надежности.
Задачей настоящего изобретения является осуществление устройства захвата, способное решить обозначенные выше проблемы, присущие известным устройствам.
Указанная задача решается при помощи устройства захвата в соответствии с определением и характеристикой, приведенными в наиболее общей форме в прилагаемом пункте 1 формулы изобретения, и в более частных примерах осуществления, приведенных в зависимых ее пунктах.
Также предметом настоящего изобретения является космический аппарат в соответствии с пунктами 14 и 15 формулы, касающимися одного и того же конкретного примера осуществления изобретения.
Изобретение наилучшим образом будет раскрыто посредством последующего описания примеров осуществления, которые носят пояснительный, а не ограничивающий характер, со ссылкой на прилагаемые чертежи, где:
- фиг. 1 - вид устройства захвата в изометрии в соответствии с примером осуществления настоящего изобретения;
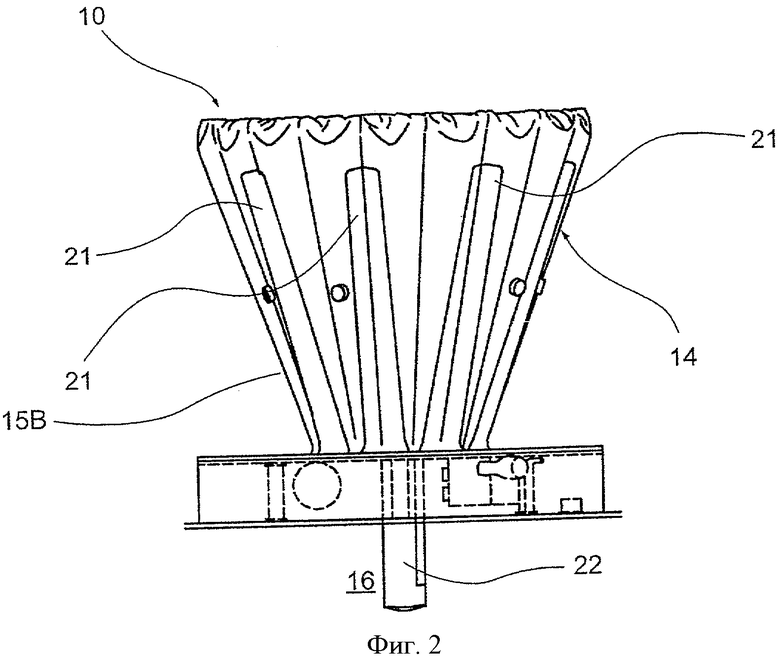
- фиг. 2 показывает вид спереди (вертикальную проекцию) устройства захвата с фиг. 1;
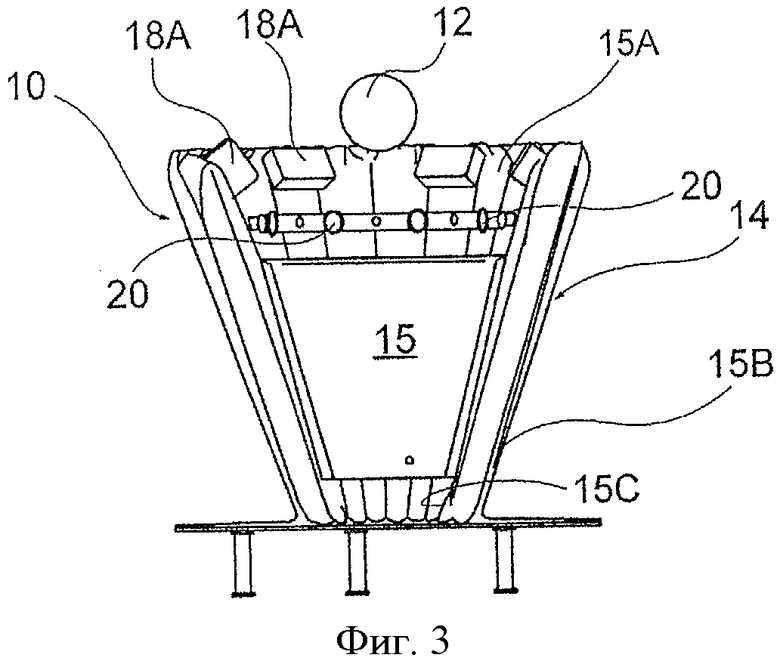
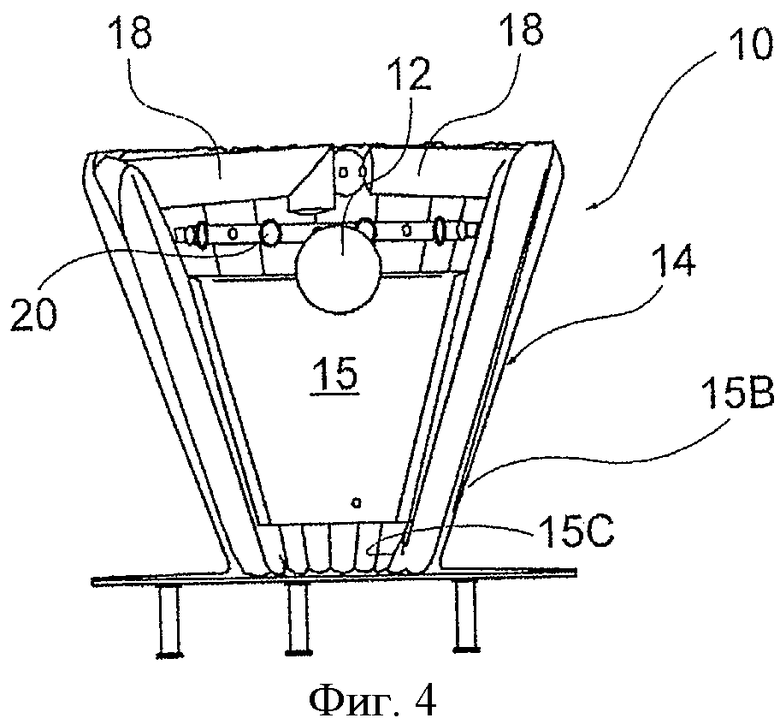
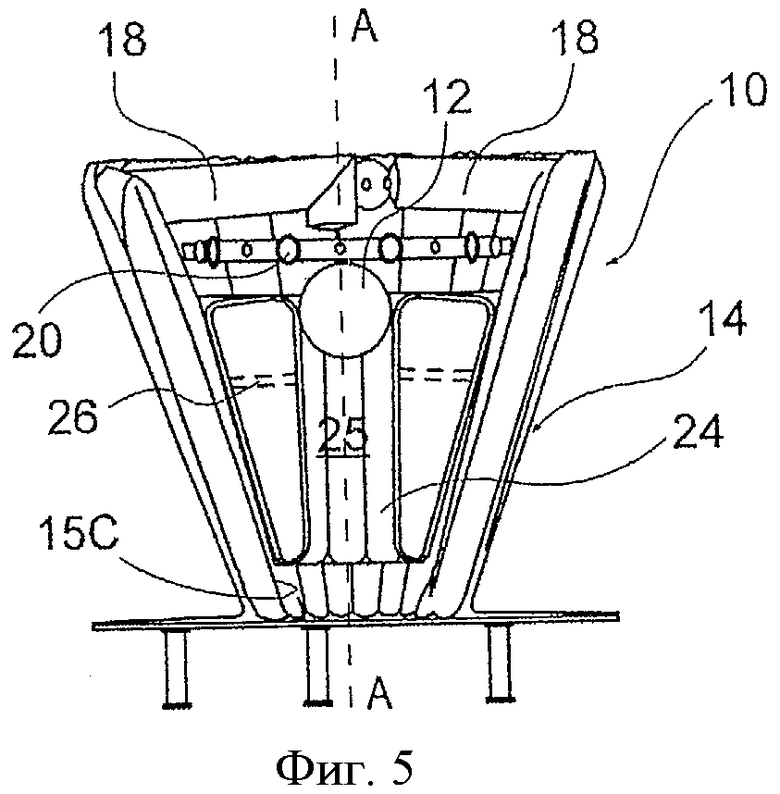
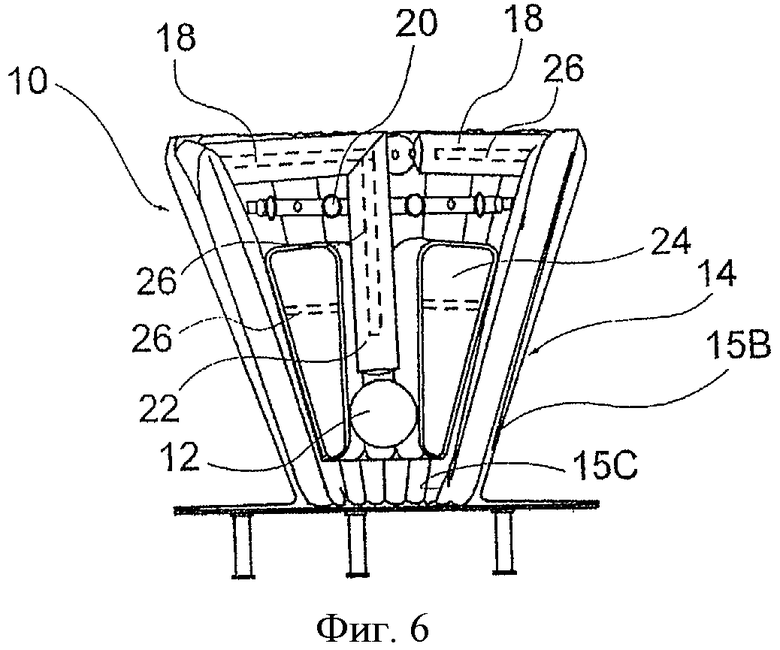
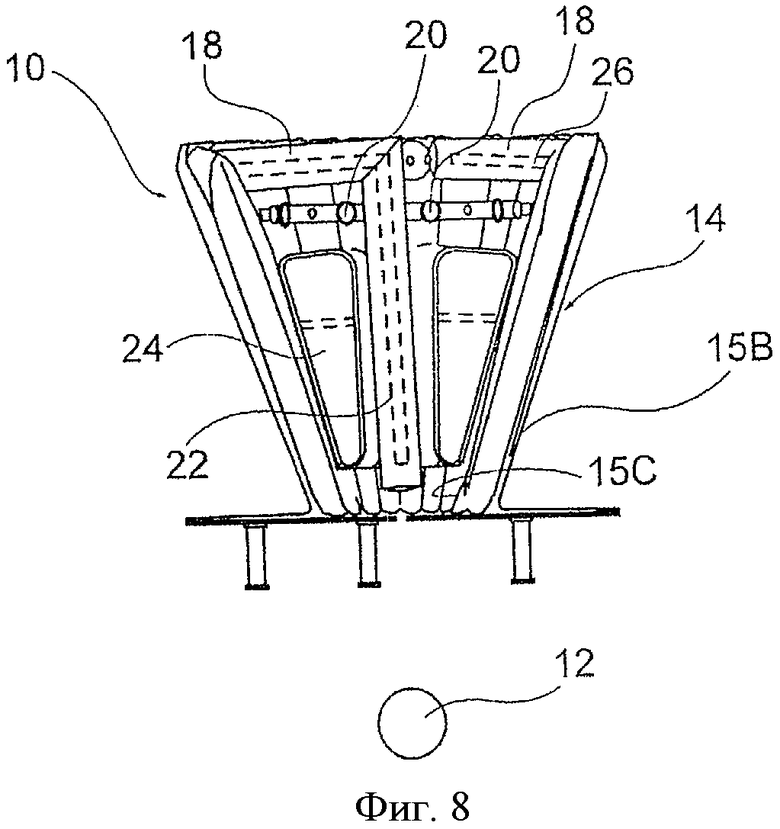
- фиг. с 3 по 8 показывают продольные разрезы устройства с фиг. 1 в различных рабочих положениях, соответствующих последовательности процесса захвата объекта, находящегося в состоянии свободного полета в космическом пространстве;
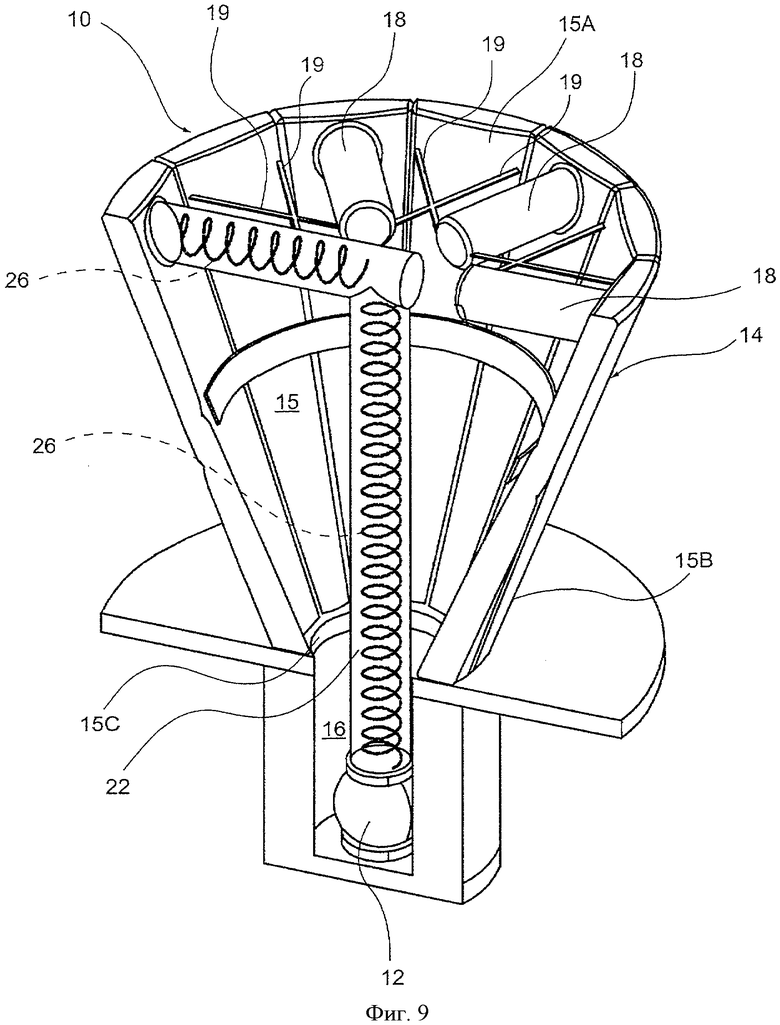
- фиг. 9 представляет изометрический разрез для примера осуществления устройства захвата в соответствии с настоящим изобретением, где отдельные элементы опущены; и
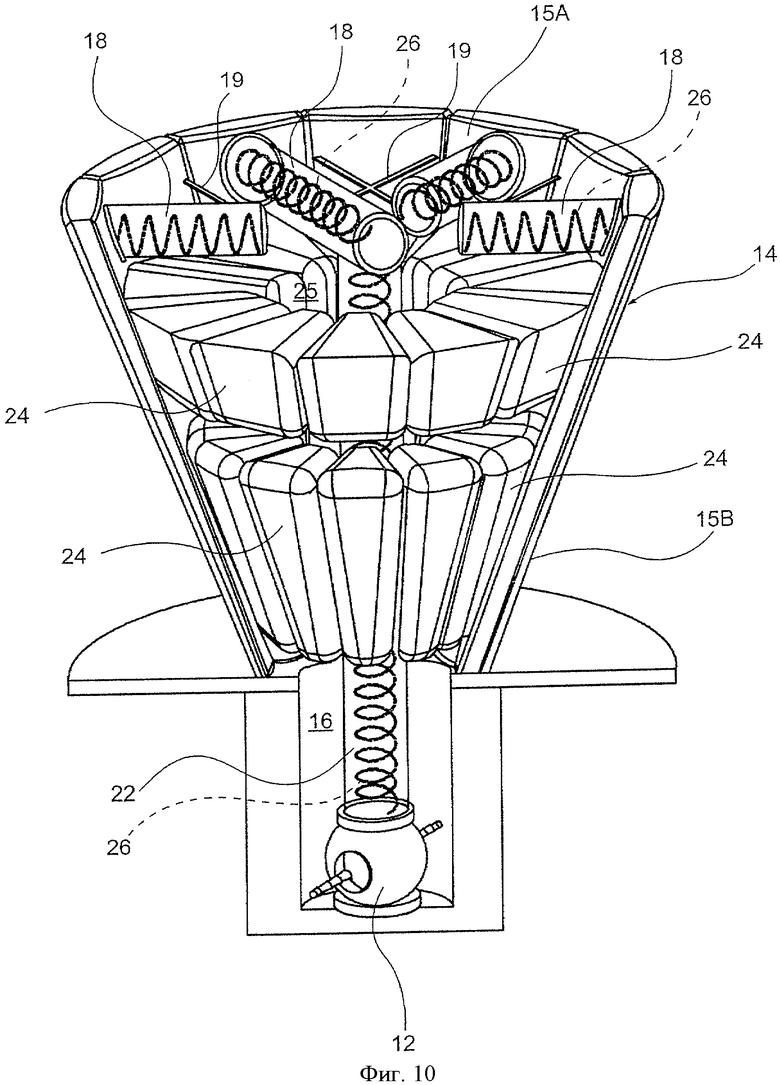
- фиг. 10 представляет вид в изометрии устройства захвата с фиг. 9, где видны некоторые элементы указанного устройства, не показанные на фиг. 9.
В нижеследующем описании одни и те же или подобные элементы имеют одинаковые позиции на всех фигурах.
В исходном положении, устройство захвата в соответствии с примером осуществления настоящего изобретения по фиг. 1 и 2 представлено в общем виде на фиг. 10.
Устройство захвата 10 может быть установлено на борту космического аппарата для захвата характерных объектов, находящихся в состоянии свободного полета в космическом пространстве.
Такое устройство может иметь и иные типы прикладных применений, таких как, например, отклонение траектории метеорита или восстановление работы спутников, находящихся в нерабочем состоянии.
Космический аппарат с бортовым устройством захвата 10 может представлять собой, например, космический корабль, такой как искусственный спутник, орбитальный космический модуль, орбитальная космическая платформа, космический челнок и т.п.
Желательно, чтобы космический аппарат, на борту которого устанавливается устройство 10, являлся космическим кораблем, выведенным на планетарную орбиту, таким как спутник.
В приведенных примерах объект, находящийся в состоянии свободного полета в космическом пространстве, подлежащий захвату, представляет собой контейнер 12 для сбора образцов материалов, которые взяты, например, с поверхности планеты и подлежат анализу в лаборатории. Однако объекты, находящиеся в состоянии свободного полета в космическом пространстве, могут представлять собой и объекты или космический объект иного рода, как, например, детали космических аппаратов, пилотирование которых прекращено, объекты или аппараты, отделившиеся от космических кораблей и т.д.
Устройство захвата 10 преимущественно содержит основной надувной корпус 14, который, предпочтительно, выполнен таким образом, что имеет одну камеру, которая образует, по меньшей мере, частично, камеру захвата 15 (фиг. 3) для приема контейнера 12.
В примерах осуществления изобретения, показанных на фигурах, основной корпус 14 имеет форму корзины. Корпус 14 имеет входное отверстие, через которое может пройти контейнер 12 для расположения внутри камеры захвата 15.
Желательно, чтобы корпус 14 имел суживающуюся форму, предпочтительно, форму усеченного конуса.
Более конкретно, в примерах осуществления изобретения, представленных на фигурах, корпус 14 имеет форму, сходящуюся в направлении от входного отверстия 15А к нижнему участку 15В корпуса 14.
В представленных примерах корпус в полностью надутом состоянии имеет форму усеченного конуса, характеризующуюся углом примерно 20°, диаметром входного отверстия 15А от приблизительно 600 мм до приблизительно 1000 мм и высотой от приблизительно 1000 мм до приблизительно 1300 мм, но не ограничивающуюся указанными значениями.
Согласно другим примерам осуществления настоящего изобретения, основной корпус 14 может иметь, тем не менее, форму, отличную от конической, например, цилиндрическую.
В предпочтительном варианте корпус 14 имеет выходное отверстие 15С (фиг. 3), находящееся напротив входного отверстия 15А. Более конкретно, выходное отверстие расположено в нижнем участке 15В корпуса 14.
В соответствии с примером осуществления идеи изобретения, выходное отверстие 15С может сообщаться с камерой для хранения 16, в которой может располагаться контейнер 12 по окончании этапа захвата. В предпочтительном варианте камера для хранения 16 образована соответствующей оболочкой или кожухом, расположенным на стороне, противоположной камере захвата, по отношению к выходному отверстию 15С.
В соответствии с примером осуществления изобретения, устройство захвата снабжено заградительными средствами для удержания контейнера 12 внутри камеры захвата 15 после того, как указанный контейнер пройдет через входное отверстие 15А корпуса 14. На практике заградительные средства служат для того, чтобы загородить, хотя бы частично, контейнер 12 после его приема камерой захвата 15, не давая ему возможности выйти через это отверстие, например, при сотрясении части корпуса 14.
В соответствии с наиболее предпочтительным примером осуществления изобретения, заградительные средства включают в себя множество надувных консолей 18, которые могут совершать движения от положения ожидания до рабочего положения. В положении ожидания эти надувные консоли находятся в сдутом и, желательно, свернутом состоянии, каждое в соответствующем гнезде 18А (фиг. 3). Например, каждая консоль 18 может быть соответствующим образом свернута, чтобы позволить контейнеру 12 пройти сквозь входной отверстие 15А устройства 10.
В рабочем положении надувные консоли надуты, например, при помощи газа и направлены внутрь корпуса 14.
В соответствии с предпочтительным примером осуществления идеи изобретения, надувные консоли располагаются у входного отверстия корпуса 14, например, на равных угловых расстояниях и выходят из корпуса в направлении от его периферии к центру указанного отверстия.
В представленных примерах осуществления изобретения, где входное отверстие имеет практически круглую форму, надувные консоли 18 выходят в практически радиальном направлении от периферии к центру указанного отверстия.
В соответствии с примером осуществления изобретения, заградительные средства снабжены дополнительными заградительными деталями для усиления эффекта заграждения входного отверстия 15А. Наличие дополнительных заградительных средств обеспечивает удержание контейнера 12 внутри камеры захвата 15 после его приема внутрь и приведения в действие заградительных средств. Иными словами, со ссылкой на приведенные примеры осуществления изобретения, дополнительные заградительные средства позволяют удерживать контейнер 12 внутри камеры захвата 15, когда надувные консоли 18 находятся в рабочем положении.
В отношении примеров осуществления изобретения, представленных на фигурах, дополнительные заградительные средства содержат множество отрезков заградительных лент 19 (отчетливо видны на фиг. 9), протянутых между надувными консолями 18, подобно сети или паутине, когда указанные консоли находятся в рабочем положении. Более конкретно, в соответствии с примером осуществления изобретения, дополнительные заградительные средства имеют пары отрезков лент, расположенных крестообразно, в предпочтительном варианте связанных друг с другом, либо образованных из единой детали крестообразной формы, у каждого из которых один конец прикреплен к корпусу 14, а противоположный - к одному из надувных консолей 18.
Заградительные ленты 19, например, не позволяют контейнеру 12 покинуть пределы объема захвата, пройдя между двумя соседними надувными консолями 18.
Такое может произойти, если размеры контейнера будут малы до такой степени, что позволят ему пройти сквозь свободное пространство между указанными консолями.
Следовательно, желательно, чтобы размеры лент 19 соответствовали размерам контейнера 12 и входного отверстия 15А таким образом, чтобы не дать возможности захваченному контейнеру 12, вошедшему в камеру захвата покинуть ее.
Устройство захвата 10 преимущественно имеет в своем составе сенсорную систему, реагирующую на присутствие контейнера 12 внутри камеры захвата 15, когда указанный контейнер проходит зону чувствительности, например, через плоскость, расположенную перпендикулярно оси симметрии корпуса 14, направленной вдоль линии, соединяющей входное отверстие 15А с выходным отверстием 15С.
В соответствии с примером осуществления идеи изобретения, сенсорная система имеет в своем составе чувствительные средства или датчики, расположенные внутри камеры захвата. В примере, представленном на фигурах, эти чувствительные средства образованы множеством оптоэлектронных устройств, таких как фотоэлектрические датчики 20 (фиг. 3), установленные на опорной конструкции, имеющейся на стенке корпуса 14, и контролирующие камеру захвата 15.
В предпочтительном варианте датчики 20 располагаются ниже надувных консолей 18 в направлении от входного отверстия 15А к нижнему участку 15В корпуса 14, т.е. в направлении вхождения контейнера 12 в камеру захвата 15.
В соответствии с примером осуществления изобретения, устройство захвата 10 снабжено защитными полостями 21 для кабелей, которые содержат электрические кабели, соединяющие датчики 20 и дополнительные детали, подвергающиеся тепловому воздействию. Такие защитные полости в предпочтительном варианте располагаются в продольном направлении от входного отверстия 15А к выходному отверстию 15С корпуса 14, вдоль стенки корпуса, расположенной с противоположной стороны камеры захвата 15.
В соответствии с представленными примерами осуществления изобретения, устройство захвата 10 снабжено толкателем для перемещения контейнера 12 в камеру хранения 16.
В соответствии с примером осуществления изобретения, толкатель имеет надувной участок, связанный с одной из надувных консолей 18. В частности, толкатель 22 в надутом состоянии направлен от связанной с ним консоли к выходному отверстию 15С корпуса 14. В предпочтительном варианте толкатель 22 в полностью надутом состоянии направлен от соответствующей надувной консоли таким образом, чтобы пройти через выходное отверстие 15С корпуса 14.
В соответствии с предпочтительным примером осуществления изобретения, надувная камера основного корпуса и надувные консоли выполнены с возможностью их пневматического соединения друг с другом. Аналогично и толкатель 22, и соответствующая ему надувная консоль пневматически соединены друг с другом.
В частности, надувная камера основного корпуса 14, надувные консоли 18 и толкатель 22 имеют различные давления активации.
В предпочтительном варианте надувная камера корпуса 14 и надувные консоли 18, а также толкатель 22 и соответствующая надувная консоль взаимодействуют посредством соответствующих клапанов (не показаны). Такие клапаны могут срабатывать, когда давление в надувной камере корпуса 14 достигает заданного значения, для обеспечения последующего надувания надувных консолей. Подобным образом клапан, имеющийся между толкателем 22 и соответствующей надувной консолью, может приводиться в действие, когда давление в указанной консоли достигает заданного значения, позволяющего произвести надувание толкателя 22.
Поскольку надувная камера корпуса 14, надувные консоли 18 и толкатель могут взаимодействовать друг с другом и, поскольку устанавливаются различные значения давления для запуска процесса надувания, можно накачать корпус 14, надувные консоли 18 и толкатель 22 в соответствии с предварительно определенной последовательностью.
В предпочтительном варианте устройство захвата 10 содержит надувные направляющие элементы 24 (фиг. 5), расположенные внутри камеры захвата 15, для направления контейнера 12 при его движении к камере хранения 16.
В соответствии с представленным примером осуществления изобретения надувные направляющие элементы 24 располагаются вдоль стенки корпуса 14 вокруг оси АА (фиг. 5) указанного корпуса. В предпочтительном варианте ось АА является осью симметрии корпуса 14, направленной вдоль линии, соединяющей входное отверстие 15А с выходным отверстием 15С.
В соответствии с примером осуществления изобретения, надувные направляющие элементы 24 представляют собой единую надувную камеру (фиг. 5). Однако в соответствии с другим примером осуществления изобретения, надувные направляющие элементы 24 могут быть выполнены в виде нескольких отдельных элементов, каждый из которых снабжен соответствующей надувной камерой (фиг. 10).
Надувные направляющие элементы 24 выполнены таким образом, чтобы обеспечить путь или траекторию 25 (фиг. 5 и 10) для направления контейнера к выходному отверстию 15С корпуса 14.
В предпочтительном варианте надувные направляющие элементы 24 обеспечивают центрирование для выравнивания контейнера 12 по отношению к выходному отверстию 15С перед и/или во время этапа, когда надувной толкатель 22 выталкивает указанный контейнер.
Далее описывается работа устройства захвата 10 в соответствии с настоящим изобретением, со ссылкой на иллюстрированные примеры осуществления.
В исходном положении корпус 14 находится в соответствующем месте в незаполненном состоянии в свернутом, например, в сложенном виде.
Незадолго до начала этапа захвата, корпус 14 быстро накачивается при помощи соответствующего средства и располагается таким образом, чтобы входное отверстие пересекало траекторию контейнера 12.
На данном этапе надувные консоли 18 находятся в положении ожидания. Более конкретно, надувные консоли остаются в положении ожидания, пока контейнер 12, после прохождения через входное отверстие корпуса 14, движется сквозь зону чувствительности, определенную датчиками 20.
Когда это происходит, датчики 20 посылают сигнал к началу заполнения надувных консолей 18, дополнительных направляющих элементов 24, если таковые присутствуют, и толкателя 22. В предпочтительном варианте последовательность наполнения включает в себя предварительную фазу, во время которой накачиваются консоли 18, вслед за тем происходит накачивание надувных направляющих элементов 24, и финальную фазу накачивания толкателя 22. Благодаря предварительному наполнению надувных консолей 18 и, если они присутствуют, дополнительным заградительным лентам 19, обеспечивается быстрый захват контейнера 12 внутри камеры захвата 15, предотвращая его выход через входное отверстие 15А.
Толкатель 22 постепенно приводится в накачанное состояние, проходя через направляющий канал 25, образованный надувными направляющими элементами 24, если они присутствуют, проталкивая контейнер 12 к выходному отверстию 15С, пока он не окажется в камере хранения 16. Это воздействие давлением на контейнер 12 особенно усиливается за счет формы устройства захвата, особенно если отсутствуют надувные направляющие элементы 24, поскольку геометрия корпуса 14 вынуждает контейнер 12 двигаться в направлении выходного отверстия 15С, чтобы войти в камеру хранения 16.
На основании приведенного выше описания, можно понять, как устройство захвата в соответствии с настоящим изобретением может решить обозначенные выше проблемы, с учетом известного уровня техники.
В частности, условие создания устройства захвата на пневматическом принципе позволяет выгодно снизить как массу такого устройства, так и его размер, а следовательно, и добиться значительного снижения его стоимости, в частности, затрат на его создание.
Более того, условие создания устройства захвата на пневматическом принципе позволяет значительно уменьшить количество электромеханических устройств и электронных модулей, требуемых для управления таким устройством и контроля за ним, а следовательно, повысить его надежность.
Очевидно, что могут быть представлены видоизменения и вариации вышеописанного и иллюстрированного примера, не меняющие его сути.
В соответствии с представленным предпочтительным примером осуществления изобретения, устройство захвата 10 имеет восстанавливающую систему, реализующую режим многократной работы.
В представленных примерах осуществления изобретения такая система включает в себя множество восстанавливающих средств, связанных с надувными консолями 18 и толкателем 22.
В соответствии с примерами осуществления изобретения, представленными на фиг. 9 и 10, восстанавливающие устройства представляют собой упругие детали в виде спиральных пружин, каждая из которых вставляется внутрь каждой надувной консоли 18 и внутрь толкателя 22. Однако в соответствии с другими примерами осуществления идеи изобретения, эластичные восстанавливающие устройства могут быть иными, например упругие тросы.
Предпочтительно, восстанавливающими устройствами 26 оснащаются и дополнительные направляющие устройства 24.
Когда надувные консоли находятся в положении ожидания, восстанавливающие пружины 26 находятся в ненагруженном состоянии, тогда как в рабочем положении надувных консолей они создают нагрузку. В частности, когда надувные консоли накачиваются и движутся из положения ожидания в рабочее положение, пружины 26 противодействуют наполнению и стремятся вернуть указанные консоли в положение ожидания. Когда давление в надувных консолях сброшено, пружины 26 более не уравновешиваются давлением газа, позволяя надувным консолям вернуться в положение ожидания. Таким образом, устройство захвата готово снова осуществить фазу захвата.
Основные принципы изобретения неизменны, но варианты его осуществления и детали могут быть подвержены изменениям и усовершенствованиям, не меняющим его сути, относительно описания и иллюстраций, которые представлены здесь в качестве примеров изобретения, определенного в прилагаемой формуле, не ограничивающегося приведенными примерами.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДУВНОЙ АВТОНОМНЫЙ КОСМИЧЕСКИЙ МОДУЛЬ | 2003 |
|
RU2241644C1 |
| ШИБЕРНЫЙ ЗАТВОР ДЛЯ КОНТЕЙНЕРА С РАСПЛАВЛЕННЫМ МЕТАЛЛОМ | 2018 |
|
RU2766944C2 |
| Космический аппарат с устройством аэродинамического торможения для увода космических объектов с орбиты в атмосферу Земли и способ управления его полетом | 2020 |
|
RU2748483C1 |
| Спускаемый аппарат-буксир для снятия космических объектов с орбиты | 2015 |
|
RU2626788C2 |
| АЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2436715C2 |
| СПОСОБ УВОДА КОСМИЧЕСКОГО АППАРАТА, ЗАВЕРШИВШЕГО АКТИВНОЕ ФУНКЦИОНИРОВАНИЕ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ | 2023 |
|
RU2824862C1 |
| СПОСОБ ДОСТАВКИ ГРУЗОВ С ПИЛОТИРУЕМЫХ ОРБИТАЛЬНЫХ СТАНЦИЙ НА ПОВЕРХНОСТЬ ЗЕМЛИ | 2008 |
|
RU2381967C1 |
| БАТАРЕЯ И СПОСОБ ИЗГОТОВЛЕНИЯ БАТАРЕИ | 2018 |
|
RU2693575C1 |
| СПОСОБ УСКОРЕНИЯ СХОДА С ОРБИТЫ КОСМИЧЕСКОГО АППАРАТА, ЗАВЕРШИВШЕГО АКТИВНОЕ ФУНКЦИОНИРОВАНИЕ | 2022 |
|
RU2783669C1 |
| АППАРАТ ДЛЯ СОРТИРОВКИ ДРАГОЦЕННЫХ КАМНЕЙ | 2017 |
|
RU2702029C1 |

Группа изобретений относится к устройствам захвата свободно летящих объектов, устанавливаемым на борту космического аппарата (КА), в частности космического корабля. Устройство (10) захвата объекта (12), первоначально находящегося в состоянии свободного полета, содержит надувной корпус (14) и камеру захвата, образованную (хотя бы частично) указанным корпусом (14). Камера захвата имеет входное отверстие, через которое захватывается объект (12), и выходное отверстие (15С) для прохода через него объекта (12) в камеру хранения (в частности, на борт КА). Для выталкивания объекта (12) через отверстие (15С) предусмотрен надувной толкатель (22). Для более надежной передачи объекта (12) в камеру хранения имеются надувные направляющие элементы (24). Устройство содержит также заградительные средства (18) входного отверстия (15А) для удержания объектов (12), находящихся в состоянии свободного полета, внутри камеры захвата (15). Технический результат изобретений направлен на упрощение конструкции устройства, повышение его надежности и снижение массы КА. 2 н. и 18 з.п. ф-лы, 10 ил.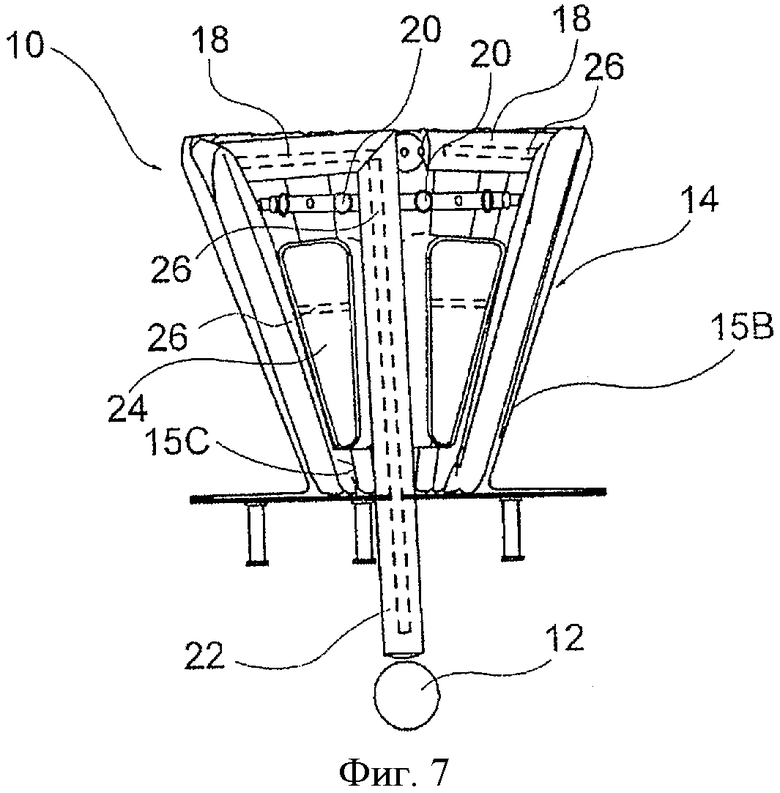
1. Устройство захвата (10) для захвата, по крайней мере, одного объекта (12), находящегося в состоянии свободного полета в космическом пространстве, которое может быть установлено на борту космического аппарата, содержащее
надувной основной корпус (14),
камеру захвата (15), которая, по меньшей мере, частично образована надувным основным корпусом (14) и имеет входное отверстие (15А), выполненное с возможностью прохода через него подлежащего захвату объекта (12), находящегося в состоянии свободного полета в космическом пространстве, в камеру захвата (15),
выходное отверстие (15С), выполненное с возможностью прохода через него объекта (12), находящегося в состоянии свободного полета в космическом пространстве, в камеру (16), сообщающуюся с указанным выходным отверстием (15С),
характеризующееся тем, что
снабжено выталкивающим устройством (22) для выталкивания объекта (12), находящегося в состоянии свободного полета, через выходное отверстие (15С).
2. Устройство захвата (10) по п.1, характеризующееся тем, что указанный надувной основной корпус (14) имеет форму, сходящуюся в направлении от входного отверстия (15А) к выходному отверстию (15С).
3. Устройство захвата (10) по п.2, характеризующееся тем, что указанный надувной основной корпус (14) имеет форму, близкую к форме усеченного конуса.
4. Устройство захвата по одному из предыдущих пунктов, характеризующееся тем, что содержит заградительные средства (18), предназначенные для, по крайней мере, частичного заграждения входного отверстия (15А) для удержания объектов (12), находящихся в состоянии свободного полета, внутри камеры захвата (15).
5. Устройство захвата (10) по п.4, характеризующееся тем, что заградительные средства представляют собой множество надувных консолей (18), которые могут совершать движение из положения ожидания, в котором они находятся в сдутом и сложенном состоянии, каждое в соответствующем месте, в рабочее положение, в котором указанные надувные консоли выступают внутрь основного надувного корпуса (14), для, по крайней мере, частичного перекрытия входного отверстия (15А).
6. Устройство захвата (10) по п.5, характеризующееся тем, что снабжено дополнительными заградительными средствами для усиления эффекта заграждения входного отверстия (15А) с целью обеспечения удержания объекта (12), находящегося в состоянии свободного полета, внутри камеры захвата (15), при этом указанные дополнительные заградительные средства представляют собой множество заградительных лент (19), расположенных в форме сети или паутины между надувными консолями (18) в их рабочем положении.
7. Устройство захвата (10) по п.5 или 6, характеризующееся тем, что содержит сенсорную систему, формирующую зону чувствительности, которая генерирует сигнал для активации указанных заградительных средств (18), когда указанный объект (12), находящийся в состоянии свободного полета, проходит через указанную зону чувствительности.
8. Устройство захвата (10) по п.4, характеризующееся тем, что содержит сенсорную систему, формирующую зону чувствительности, которая генерирует сигнал для активации указанных заградительных средств (18), когда указанный объект (12), находящийся в состоянии свободного полета, проходит через указанную зону чувствительности.
9. Устройство захвата (10) по п.7, характеризующееся тем, что указанная сенсорная система содержит множество датчиков (20), установленных за заградительными средствами (18) в направлении входа объекта (12), находящегося в состоянии свободного полета, внутрь камеры захвата (15).
10. Устройство захвата (10) по п.4, характеризующееся тем, что оно снабжено выталкивающим устройством (22) для выталкивания объекта (12), находящегося в состоянии свободного полета через выходное отверстие (15С).
11. Устройство захвата (10) по п.7, характеризующееся тем, что оно снабжено выталкивающим устройством (22) для выталкивания объекта (12), находящегося в состоянии свободного полета через выходное отверстие (15С).
12. Устройство захвата (10) по пп.1-3, 5, 6, 8, 9, 10, 11, характеризующееся тем, что основной надувной корпус (14) снабжен стенкой, связанной с камерой захвата (15), а устройство захвата (10) снабжено надувными направляющими элементами (24), расположенными вдоль указанной стенки основного надувного корпуса (14), причем надувные направляющие элементы (24) выполнены с возможностью направления указанного объекта (12), находящегося в состоянии свободного полета, по траектории (25) к выходному отверстию (15С).
13. Устройство захвата (10) по п.7, характеризующееся тем, что основной надувной корпус (14) снабжен стенкой, связанной с камерой захвата (15), а устройство захвата (10) снабжено надувными направляющими элементами (24), расположенными вдоль указанной стенки основного надувного корпуса (14), причем надувные направляющие элементы (24) выполнены с возможностью направления указанного объекта (12), находящегося в состоянии свободного полета, по траектории (25) к выходному отверстию (15С).
14. Устройство захвата (10) по пп.1-3, 5, 6, 8, 9, 10, 11, 13, характеризующееся тем, что снабжено восстанавливающей системой для обеспечения режима многократного захвата.
15. Устройство захвата (10) по п.4, характеризующееся тем, что снабжено восстанавливающей системой для обеспечения режима многократного захвата.
16. Устройство захвата (10) по п.7, характеризующееся тем, что снабжено восстанавливающей системой для обеспечения режима многократного захвата.
17. Устройство захвата (10) по п.12, характеризующееся тем, что снабжено восстанавливающей системой для обеспечения режима многократного захвата.
18. Устройство захвата (10) по п.5, характеризующееся тем, что снабжено восстанавливающей системой для обеспечения режима многократного захвата, содержащей восстанавливающие устройства (26), обеспечивающие противодействие наполнению указанных надувных консолей (18).
19. Космический аппарат, характеризующийся тем, что снабжен устройством захвата (10) по пп.1-18.
20. Космический аппарат по п.19, характеризующийся тем, что он является космическим кораблем.
| СТЫКОВОЧНОЕ УСТРОЙСТВО ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 1979 |
|
SU805587A1 |
| УСТРОЙСТВО РЕВЕРСИРУЕМОГО ДЕЙСТВИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2003 |
|
RU2261216C1 |
| Устройство для дискретного перемещения объекта | 1976 |
|
SU604813A1 |
| US 4381092 A, 26.04.1983 | |||
| US 4057207 A, 08.11.1977 | |||
| ФОТОДЕТЕКТОР ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 2023 |
|
RU2806342C1 |

