Настоящее изобретение в целом относится к области управления устройствами с изменяемой геометрией турбомашины. В частности, изобретение относится к оптимизации управления множеством устройств турбомашины.
Под термином «устройство с изменяемой геометрией» здесь понимается устройство, содержащее орган управления, размеры, форма, расположение и/или скорость которого способны по отдельности или в совокупности изменяться, в зависимости от возникающих событий или режимов работы турбомашины, с целью воздействия на работу турбомашины. Примерами изменяемых геометрий в подобных устройствах являются положения заслонок отбора воздуха из компрессора, радиальные зазоры лопаток турбины, скорости вращения топливного насоса и т.д.
Под термином «корпус», в том смысле, в котором он применяется в данном описании, здесь понимается узел турбомашины, содержащий в качестве своих основных органов компрессор и турбину, собранные на одной оси. Частным случаем корпусов является форсажная камера, в которой компрессор состоит только из дозвукового реактивного сопла и используется в прямоточных воздушно-реактивных двигателях. Типичными примерами отдельных корпусов турбомашины являются корпусы низкого и высокого давления турбореактивного двигателя.
Как правило, корпусы турбомашины имеют конструкцию, обеспечивающую возможность их работы независимо друг от друга (см., например, патент США №4403912). Скорости их вращения не зависят друг от друга, причем даже в тех случаях, когда они могут быть связаны друг с другом или коррелированны друг относительно друга в некоторых режимах работы.
Именно по причине этой независимости друг относительно друга различных корпусов одной турбомашины, обычно для управления устройствами с изменяемой геометрией, входящими в состав различных корпусов, предусматривают отдельные системы управления. По этой причине управление двумя устройствами с изменяемой геометрией двух отдельных корпусов требует, таким образом, как правило, двух контуров управления, двух приводных механизмов, двух источников питания и т.д.
Это приводит к тому, что масса, стоимость и габаритные размеры подобной системы управления оказываются относительно высокими. А это может представлять собой, в частности, проблему в случае турбомашин, применяемых на небольших самолетах, для которых подобная проблема является особенно острой.
Таким образом, первой задачей изобретения является создание системы управления для управления, по меньшей мере, двумя устройствами с изменяемой геометрией в турбомашине, имеющей корпус высокого давления и корпус низкого давления, причем система содержит приводной механизм, который воздействует на два устройства из указанных, по меньшей мере, двух устройств с изменяемой геометрией, при этом одно из указанных двух устройств с изменяемой геометрией является лопаточным устройством, имеющим, по меньшей мере, одну ступень лопаток статора с переменным углом установки, а другое из указанных двух устройств с изменяемой геометрией является клапанным устройством, представляющим собой клапан отбора воздуха для корпуса турбомашины, причем лопаточное устройство является частью корпуса высокого давления, а клапанное устройство является частью корпуса низкого давления, отличающаяся тем, что она выполнена с возможностью управления постепенным открытием ступени лопаток и постепенным закрытием клапана отбора воздуха по мере возрастания значения параметра управления приводным механизмом; причем такая система управления позволяет решить, по меньшей мере, частично указанные выше проблемы ее массы, стоимости и габаритных размеров.
Решение этой задачи обеспечивается за счет того, что принцип работы системы управления предусматривает управление постепенным открытием ступени лопаток и постепенным закрытием клапана отбора воздуха, по мере возрастания параметра управления приводного механизма.
Согласно одному из вариантов реализации изобретения, система управления способна управлять тремя и даже четырьмя устройствами с изменяемой геометрией, посредством одного единственного приводного механизма.
Согласно одному из вариантов реализации изобретения одно устройство с изменяемой геометрией является общим для нескольких корпусов турбомашины, в частности, для двух корпусов. Путем использования одного единственного приводного механизма, управляющего несколькими (по меньшей мере, двумя) устройствами с изменяемой геометрией, система управления позволяет уменьшить количество деталей турбомашины и обеспечить, таким образом, решение задачи изобретения. Проблем, связанных с весом, объемом, стоимостью второй системы управления вторым устройством с изменяемой геометрией, таким образом, удается, по меньшей мере, в значительной степени, избежать.
Изобретение может быть в частности применено в двухкорпусной турбомашине, то есть в турбомашине, располагающей корпусом высокого давления и корпусом низкого давления. Одна или несколько ступеней лопаток с переменным углом установки входят обычно в состав корпуса высокого давления. В этом случае, первое устройство, управляемое системой управления, может входить в состав корпуса низкого давления турбомашины, а второе управляемое устройство, которое включает в себя одну или несколько ступеней лопаток с переменным углом установки, входит в состав корпуса высокого давления.
Ступени лопаток с переменным углом установки, входящие в состав корпуса высокого давления турбомашины, поддаются, в частности, управлению совместно с устройством корпуса низкого давления, в том случае, когда они расположены по периферии (и несколько до) корпуса высокого давления. Таким образом, они располагаются вблизи корпуса низкого давления. Указанная близость способствует реализации системы управления, общей как для ступеней лопаток, так и для устройств, имеющих переменную геометрию корпуса низкого давления.
Согласно одному из вариантов реализации изобретения ступень лопаток во втором устройстве состоит из множества лопаток, каждая из которых установлена, с возможностью поворота, на корпусе компрессора турбомашины, а также из кольца управления, окружающего корпус компрессора и связанного с каждой из лопаток посредством рычагов, при этом приводной механизм способен приводить во вращение кольцо управления ступенью посредством приводного органа, установленного, с возможностью вращения, на корпусе компрессора.
Согласно варианту реализации изобретения устройство с изменяемой геометрией, которое представляет собой заслонку отбора воздуха турбомашины или содержит, по меньшей мере, одну заслонку отбора воздуха турбомашины, может представлять собой заслонку или даже набор разгрузочных заслонок или заслонок отбора воздуха.
Согласно другим различным вариантам реализации изобретения устройство с изменяемой геометрией, которое представляет собой или содержит, по меньшей мере, одну заслонку отбора воздуха, представляет собой или содержит один из следующих элементов или один элемент одного из следующих устройств:
- одну бустерную заслонку отбора воздуха (VBV);
- одну заслонку отбора воздуха из компрессора высокого давления с пропорциональным открытием (SBV);
- одну заслонку отбора воздуха из компрессора высокого давления, работающую в режиме "полностью открыто или закрыто" (HBV);
- одну заслонку регулирования расхода воздуха, участвующую в управлении зазором в турбине низкого давления (LPTACC) или в турбине высокого давления (НРТАСС).
Кроме того, система управления согласно изобретению может содержать, в частности, следующие различные усовершенствования.
Согласно одному из вариантов реализации изобретения приводной механизм системы управления содержит подвижный орган управления, перемещения которого сопровождаются подачей команды двум устройствам. В качестве органа управления может применяться, например, рычаг гидроцилиндра.
В одном варианте этого варианта реализации изобретения, приводной механизм предназначен для воздействия на первое из этих устройств за счет изменения параметра в диапазоне управления первым устройством, вне пределов которого он не в состоянии воздействовать на первое устройство, при этом приводной механизм предназначен для воздействия на второе из этих устройств за счет изменения того же параметра в диапазоне управления вторым устройством, вне пределов которого он не в состоянии воздействовать на второе устройство, причем, по меньшей мере, часть диапазона управления первым устройством находится вне пределов диапазона управления вторым устройством.
Указанным выше параметром приводного механизма является, как правило, параметр положения органа управления приводным механизмом. Например, в качестве этого параметра может рассматриваться положение конца рычага гидроцилиндра. Изменять этот параметр означает на самом деле перемещать эквивалентным образом конец гидроцилиндра или изменять положение воздействующего конца приводного механизма.
В этой системе управления, управление с помощью одного единственного приводного механизма двумя устройствами с изменяемой геометрией облегчается тем обстоятельством, что диапазоны управления обоими устройствами не соответствуют друг другу ввиду того, что диапазон управления одним из них (первое устройство) содержит участок, не входящий в состав диапазона другого (второго устройства).
Работа системы управления обычно предусматривается таким образом, чтобы изменений параметра приводного механизма внутри зоны, ограниченной двумя границами диапазона управления каждого из устройств, было достаточно для их приведения в действие с достаточной амплитудой в пределах этого диапазона.
Кроме того, в том случае, когда величина параметра управления меняется в интервале, выходящем за пределы диапазона управления устройствами, последнее не приводится в действие посредством приводного механизма. Подобный интервал значений параметра приводного механизма, внутри которого никакое воздействие по существу не прикладывается к рассматриваемому устройству, представляет собой зону «мертвого хода». В этом диапазоне приводной механизм, при любых изменениях значений параметра, не воздействует (или воздействует только незначительным образом) на рассматриваемое устройство.
Трудность управления при использовании этой системы управления заключается в том, что каждое воздействие на приводной механизм передается или может передаваться (в зависимости от того, находятся ли устройства внутри или за пределами своих диапазонов приведения их в действие) одному или другому устройству.
В частности, в том случае, когда изменение значения параметра управления производят внутри диапазона, являющегося общим для диапазонов управления обоими приводными механизмами, воздействуют одновременно как на одно, так и на другое устройство.
Например, изменение значения параметра приводного механизма внутри диапазона управления первым устройством, когда это изменение находится также внутри диапазона управления другим устройством, приводит к одновременной передаче новой команды сразу двум устройствам ввиду того, что обе команды обусловлены изменением одного и того же параметра, например, параметра управления.
Эту трудность использования системы управления согласно изобретению можно, тем не менее, рассматривать в качестве допустимой, а иногда и не заслуживающей внимания и даже несуществующей, в том случае, когда взаимное перекрытие диапазонов управления обоими устройствами достаточно мало, и/или когда амплитуда изменений управления, по меньшей мере, одним устройством может оставаться низкой или ограниченной даже тогда, когда параметр управления проходит по всему диапазону управления другого устройства.
Поэтому, несмотря на трудность использования системы управления согласно изобретению, все равно преимущество, связанное с возможностью одновременного управления в одной турбомашине двумя устройствами с изменяемой геометрией, представляет определенный интерес, с учетом возможности не заниматься в этом случае проблемами веса, габаритов и стоимости двойной системы управления.
Трудность использования этой системы управления может быть, кроме того, минимизирована за счет подбора наиболее подходящего из имеющихся в каждом конкретном случае вариантов реализации изобретения.
Согласно одному из вариантов реализации изобретения диапазон управления вторым устройством входит в диапазон управления первым устройством. Такая реализация изобретения позволяет получить значительную по величине амплитуду управления в случае первого устройства, что позволяет облегчить реализацию его механических устройств и ограничить механические напряжения, испытываемые органами управления и/или управляемыми элементами.
Согласно одному из вариантов реализации изобретения диапазон управления вторым устройством имеет амплитуду, меньшую 20%, и даже 10%, от полной амплитуды диапазона управления первым устройством. Амплитуда диапазона управления вторым устройством оказывается, таким образом, сниженной. Таким образом, в том случае, когда диапазон управления вторым устройством входит в состав диапазона управления первым устройством, управляющие воздействия на второе устройство вызывают всего лишь небольшое и мало ощутимое изменение управления первым устройством. Такая конструкция облегчает управление посредством одной единственной системы управления обоими управляемыми устройствами. В самом деле, управление первым устройством остается в этом случае по существу постоянным, или, по меньшей мере, его изменение остается слабым или второстепенным, в то время как управление вторым устройством выполняется с полной амплитудой управления, предусмотренной для последнего.
Согласно одному из вариантов реализации изобретения блок соединения приводного механизма с одним из устройств содержит устройство расцепления, способное отсоединять привод этого устройства посредством приводного механизма в диапазоне значений параметра управления. Этот диапазон значений располагается, таким образом, вне пределов диапазона управления рассматриваемым устройством. Таким образом, устройство расцепления позволяет зарезервировать интервал диапазона управления для одного единственного управления одним или несколькими управляемыми устройствами, отличными от рассматриваемого устройства. Это может оказаться важным в том случае, когда на рассматриваемое устройство не должно оказываться никакое воздействие даже в том случае, когда меняется управление одним из управляемых устройств.
Согласно одному варианту реализации изобретения устройство расцепления содержит первый орган управления, подвижный в свободном пространстве второго органа управления, причем этот интервал создает, таким образом, зону мертвого хода для второго устройства. В зоне мертвого хода, созданной благодаря этому органу управления подвижного управления, имеется возможность свободного управления первым устройством, причем без затрагивания этим управлением второго устройства.
Согласно одному из вариантов реализации изобретения система управления содержит устройство усиления управления, расположенное в блоке соединения между приводным механизмом и одним из устройств. Таким образом, даже при наличии мало амплитудного диапазона управления этим устройством, имеется возможность управлять последним с большой амплитудой в силу усиления, обеспечиваемого устройством усиления управления. Примером подобного устройства усиления может служить рычаг.
Согласно одному из вариантов реализации изобретения система управления содержит, кроме того, средства возврата, удерживающие орган управления одним из устройств в заданном положении, по меньшей мере, в том случае, когда параметр приводного механизма изменяется в интервале, расположенном вне диапазона управления устройством.
Второй задачей изобретения является создание турбомашины, оборудованной системой управления, содержащей приводной механизм, способный управлять двумя устройствами с меняющейся геометрией, входящими в состав двух различных корпусов турбомашины и отличающихся уменьшенной массой, стоимостью и/или габаритами.
Таким образом, согласно первому объекту настоящего изобретения создана система управления для управления, по меньшей мере, двумя устройствами с изменяемой геометрией в турбомашине, имеющей корпус высокого давления и корпус низкого давления, причем система содержит приводной механизм, который воздействует на два устройства из указанных, по меньшей мере, двух устройств с изменяемой геометрией, при этом одно из указанных двух устройств с изменяемой геометрией является лопаточным устройством, имеющим, по меньшей мере, одну ступень лопаток статора с переменным углом установки, а другое из указанных двух устройств с изменяемой геометрией является клапанным устройством, представляющим собой клапан отбора воздуха для корпуса турбомашины, причем лопаточное устройство является частью корпуса высокого давления, а клапанное устройство является частью корпуса низкого давления, отличающаяся тем, что она выполнена с возможностью управления постепенным открытием ступени лопаток и постепенным закрытием клапана отбора воздуха по мере возрастания значения параметра управления приводным механизмом.
Предпочтительно система выполнена с возможностью закрытия клапана отбора воздуха таким образом, что лопатки статора с переменным углом установки начинают открываться во время закрытия клапана отбора воздуха по мере постепенного увеличения значения параметра управления приводным механизмом.
Предпочтительно когда клапан отбора воздуха по существу закрыт, система управления выполняет основную функцию, заключающуюся в открытии лопаток ступени лопаток статора с переменным углом установки.
Предпочтительно ступень лопаток образована из множества лопаток, каждая из которых установлена с возможностью поворота на корпусе турбомашины, и кольца управления, окружающего корпус и соединенного с каждой из лопаток ступени соответствующими рычагами, при этом приводной механизм выполнен с возможностью поворота кольца управления ступенью посредством приводного органа, шарнирно установленного на корпусе.
Предпочтительно приводной механизм содержит подвижный орган управления, своими перемещениями передающий команды на оба устройства.
Предпочтительно приводной механизм выполнен с возможностью приведения в действие первого из устройств путем изменения параметра в диапазоне управления первого устройства, за пределами которого он не может воздействовать на первое устройство, при этом приводной механизм выполнен с возможностью приведения в действие второго из устройств путем изменения параметра в рабочем диапазоне второго устройства, за пределами которого он не может воздействовать на второе устройство, причем, по меньшей мере часть диапазона управления первым устройством находится за пределами диапазона управления вторым устройством.
Предпочтительно диапазон управления вторым устройством входит в диапазон управления первым устройством.
Предпочтительно соединение между приводным механизмом и одним из устройств содержит устройство расцепления, выполненное с возможностью отсоединения привода этого устройства приводным механизмом в диапазоне значений параметра управления приводного механизма.
Предпочтительно устройство расцепления содержит первый орган управления, выполненный с возможностью перемещения в свободном пространстве второго органа управления, причем это пространство образует зону мертвого хода для второго устройства.
Предпочтительно система дополнительно содержит средства возврата, которые удерживают орган управления одного из устройств в заданном положении, по меньшей мере, когда параметр приводного механизма изменяется в диапазоне, находящемся за пределами диапазона управления устройством.
Предпочтительно система дополнительно содержит устройство усиления управления, присоединенное между приводным механизмом и одним из устройств.
Предпочтительно система дополнительно содержит устройство усиления управления, присоединенное между приводным механизмом и одним из указанных двух устройств, причем устройство усиления управления содержит следящий орган, шарнирно установленный на корпусе компрессора, и дополнительный поворотный орган, установленный между следящим органом и клапанным устройством, для передачи команды от приводного механизма на клапанное устройство, при этом дополнительный поворотный орган установлен с возможностью вращения как на корпусе компрессора, так и на следящем органе.
Согласно второму объекту настоящего изобретения создана турбомашина, содержащая вышеописанную систему управления.
Изобретение станет более понятным, а его преимущества более очевидными после прочтения нижеследующего подробного описания примеров реализации изобретения, приведенных со ссылкой на прилагаемые чертежи, на которых:
Фиг.1 - вид в перспективе системы управления согласно изобретению;
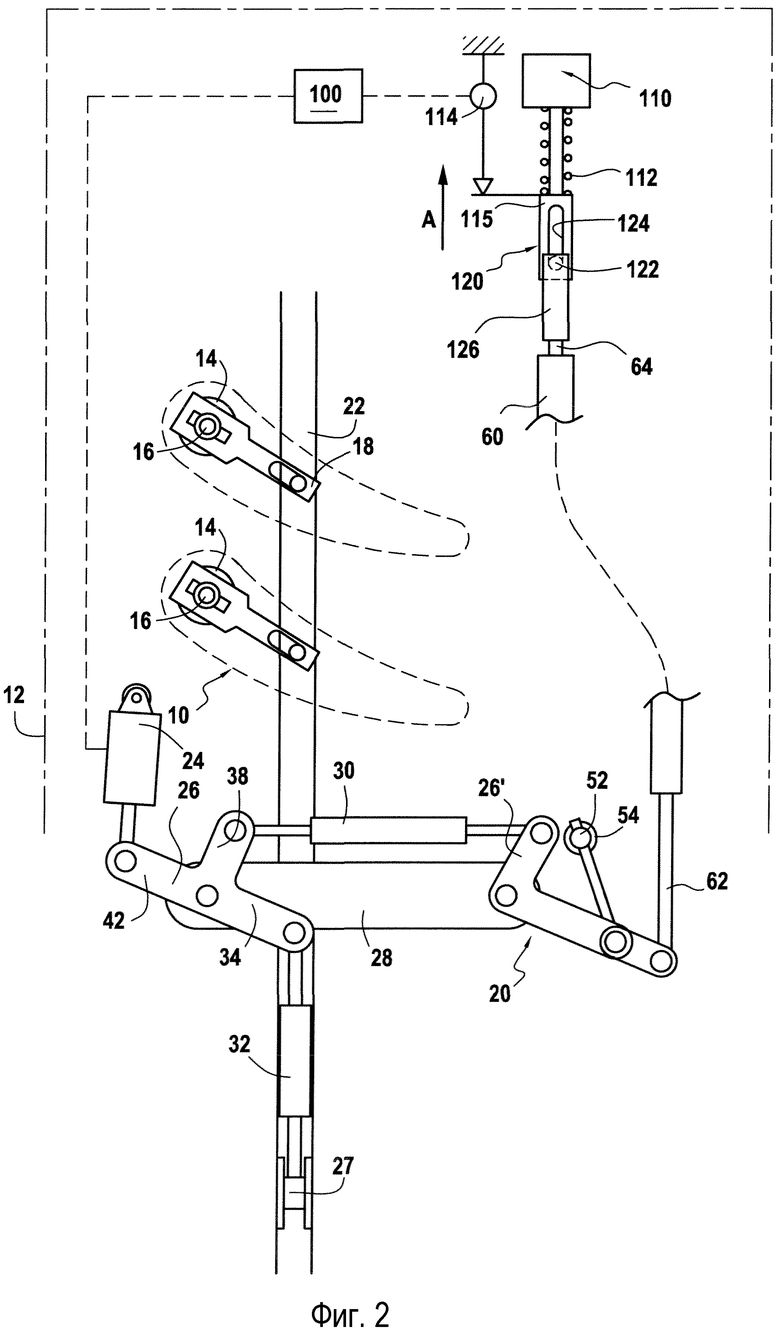
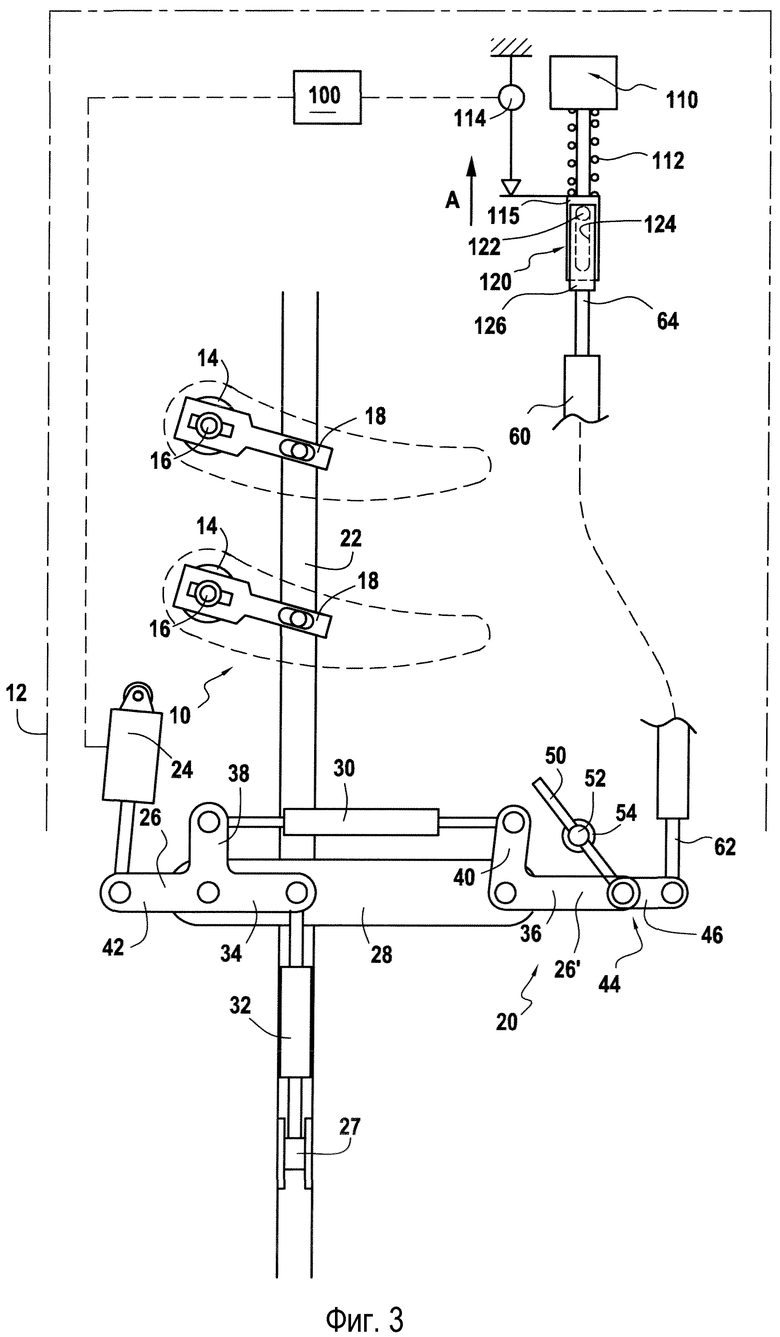
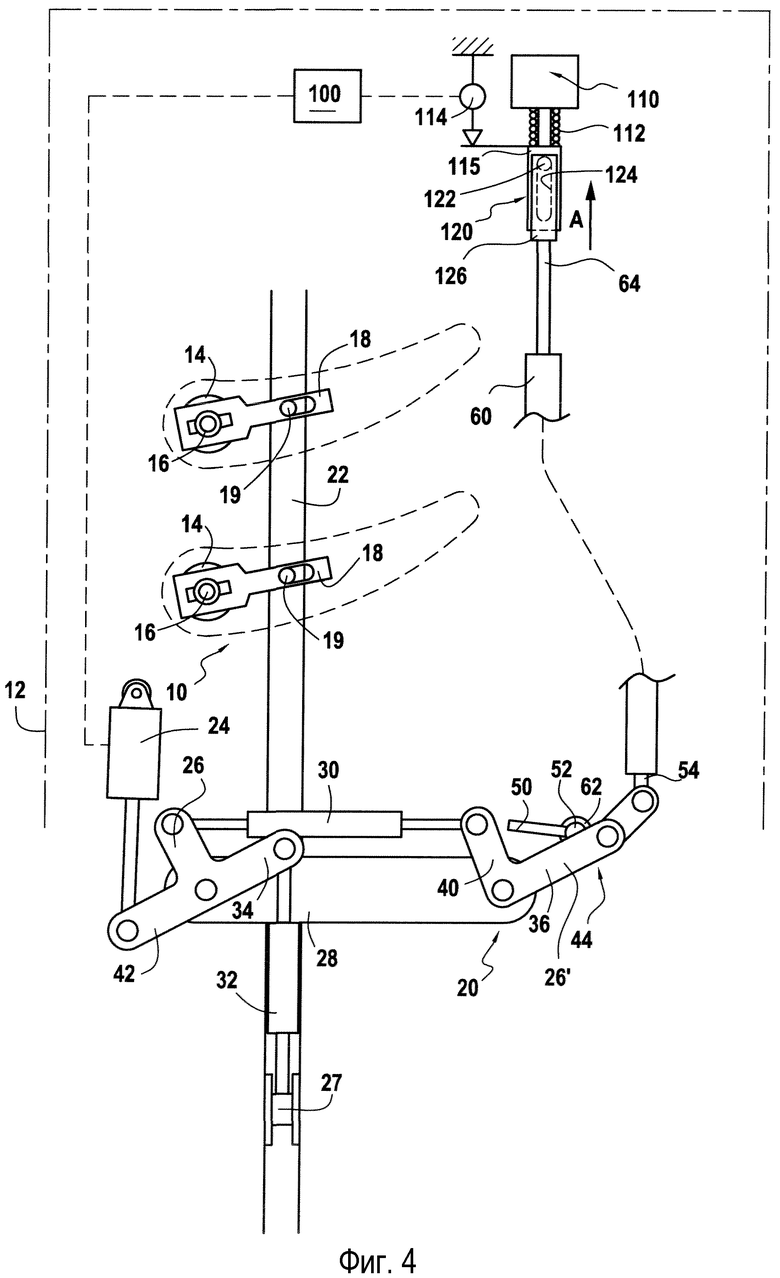
Фиг.2, 3 и 4 - виды сверху системы с фиг.1 при минимальном, промежуточном и максимальном выдвижениях штока приводного механизма, соответственно;
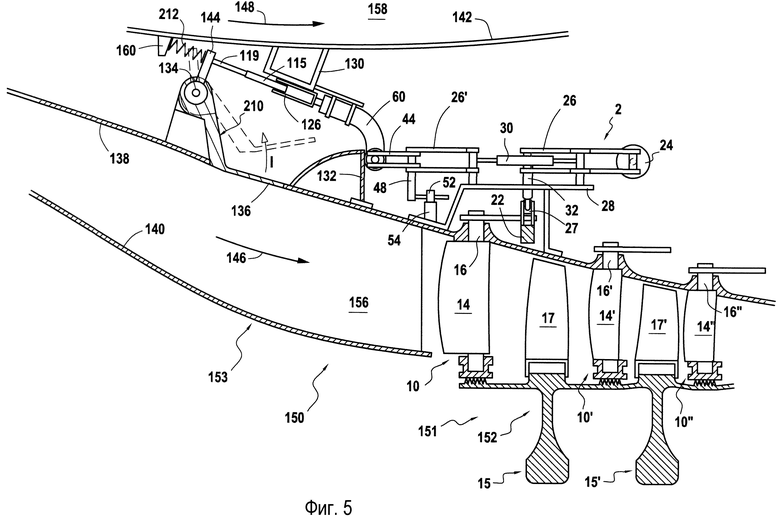
Фиг.5 - вид в продольном разрезе системы управления с фиг.1-4, для частного случая, когда устройство с изменяемой геометрией выполнено в виде устройства отбора воздуха из корпуса высокого давления;
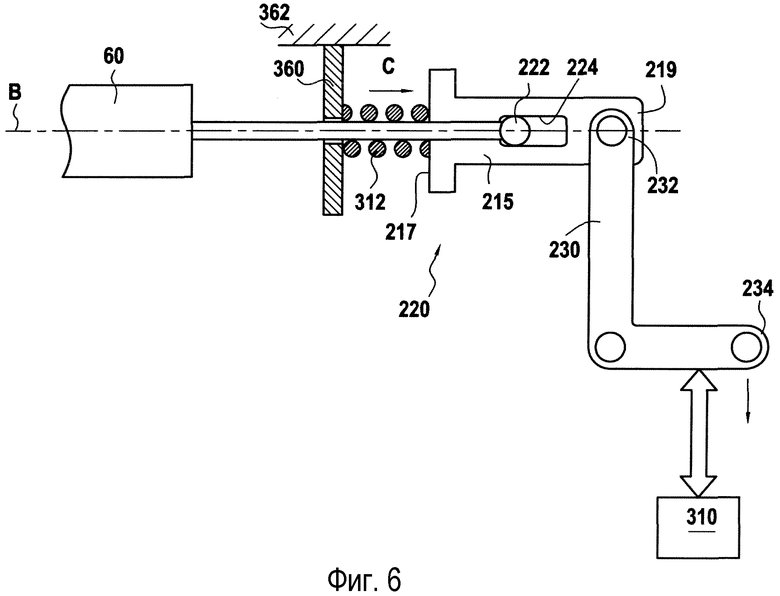
Фиг.6 - вариант системы расцепления, позволяющей создать зону «мертвого хода»; и
Фиг.7 - график, иллюстрирующий управление устройствами системы управления согласно изобретению, включающей в себя устройство расцепления с фиг.6.
Далее со ссылками на фиг.1-4 приводится описание одного из вариантов реализации изобретения системы 1 управления согласно изобретению.
Система 1 управления позволяет управлять одновременно вращением кольца 22 управления ступени 10 лопаток с переменным углом установки (первое устройство 10) и перемещением органа 115 управления второго устройства 110.
Второе устройство 110 с изменяемой геометрией может быть разных типов, например, оно может быть выполнено в виде клапана отбора воздуха турбомашины.
Ступень 10 лопаток с переменным углом установки, например, образует компрессор турбомашины. Компрессор содержит кольцеобразную оболочку 12 статора (или корпуса компрессора), которая центрирована относительно оси Х-Х турбомашины.
Ступень 10 состоит из множества лопаток 14, расположенных в радиальном направлении вокруг оси Х-Х турбомашины. Каждая из лопаток 14 способна вращаться вокруг оси 16 (или штифта), которая проходит через корпус 12 компрессора.
Каждый штифт 16 лопаток 14 с переменным углом установки присоединен к концу связи или рычага 18 управления, другой конец которого шарнирно закреплен вокруг стержней 19, расположенных в радиальном направлении по кольцу 22 управления.
Кольцо 22 управления окружает корпус компрессора 12 и центрировано относительно оси Х-Х турбомашины. Синхронизированное изменение углового положения лопаток 14 обеспечивается, таким образом, за счет вращения кольца 22 управления вокруг оси Х-Х турбомашины.
Кроме того, система управления содержит приводной механизм 24 типа гидроцилиндра, закрепленный на корпусе 12 компрессора для приведения во вращение кольца 22 управления ступени 10 посредством приводного органа 26 типа направляющего ролика, установленного с возможностью вращения на коробке 28 корпуса 12 компрессора турбомашины.
Приводной механизм 24 управляется электронным блоком 100 управления (показанным на фиг.2-4).
Поводок 32 управления, типа винтового талрепа, обеспечивает передачу движения от направляющего пилотного ролика 26 кольцу 22. Этот поводок проходит касательно по отношению к кольцу 22, к которому он прикреплен посредством соединительной скобы 27. На своем конце, противоположном относительно расположения скобы 27, поводок 32 прикреплен к рычагу (или плечу) 34 направляющего пилотного ролика 26 и шарнирно связан с ним.
Направляющий ролик 26 и поводок 32 образуют совместно цепь передачи воздействия от приводного механизма 24 к кольцу 22 управления.
Передача команды второму управляемому устройству 110 обеспечивается, прежде всего, посредством синхронизационной рейки 30.
Синхронизационная рейка 30 передает движение от гидроцилиндра 24 второму устройству 110, посредством следящего органа 26' типа направляющего ролика, установленного также с возможностью вращения на узле 28 корпуса 12 компрессора.
Таким образом, синхронизационная рейка 30 системы управления объединяет два рычага 38 и 40, соответственно, направляющих роликов, пилотного 26 и следящего 26', с которыми она шарнирно связана. Приводной механизм 24 шарнирно присоединен к третьему рычагу 42 направляющего пилотного ролика 26, расположенного напротив рычага 34, к которому прикреплен поводок 32.
Кроме того, система управления, представленная на фиг.1-4, содержит устройство 20 усиления управления (не существенное для изобретения), установленное на блоке соединения приводного механизма 24 с устройством 110 с изменяемой геометрией.
Это устройство содержит, в частности, дополнительный поворотный орган 44 (или дополнительный направляющий ролик), установленный между следящим органом 26' и устройством 110 с изменяемой геометрией. Этот дополнительный направляющий ролик 44 установлен с возможностью вращения одновременно относительно следящего органа 26' и косвенно относительно корпуса 12 компрессора посредством направляющей тяги 50 и поворотной опоры 54.
На самом деле, дополнительный направляющий ролик 44 содержит рычаг 46, первый конец которого шарнирно соединен с концом 62 кабеля 60 управления устройства 110 с изменяемой геометрией, а второй конец установлен с возможностью вращения на конце рычага 36 направляющего следящего ролика 26'. На уровне этого второго конца рычага 46, дополнительный направляющий ролик 44 содержит также ось 48 направляющего ролика, проходящую перпендикулярно первому рычагу 46 вдоль поворотной оси Z дополнительного направляющего ролика 44 на следящий орган 26'. Направляющая тяга 50 проходит через эту ось направляющего ролика 48. Она установлена со скользящей посадкой внутри кольца 52 скольжения, которое установлено с возможностью вращения на корпусе 12 компрессора, посредством поворотной опоры 54, приваренной к корпусу.
Соединение между устройством 20 усиления управления и устройством 110 с изменяемой геометрией обеспечивается дистанционно посредством кабеля 60 механизма тянуще-толкающего типа (например, кабеля 'Bowden') и скользящего стыковочного органа 120.
Действие приводного механизма 24, передаваемое направляющим роликом 26, синхронизационной рейкой 30 и следящим направляющим роликом 26', усиленное затем устройством 20 усиления управления (работа этого устройства будет описано далее), передается кабелю 60 управления.
Конец 64 кабеля 60 управления присоединен к средней части хомута или U-образной детали 126. Два плеча хомута 126 огибают с одной и с другой стороны орган 115 устройства 110 с изменяемой геометрией, который управляет перемещениями устройства 110 с изменяемой геометрией в направлении, указанном стрелкой А. Этот орган 115 управления имеет вид прямоугольной пластины, в которой просверлено овальное отверстие 124. Оба плеча хомута 126 соединяются между собой посредством штанги 122, проходящей через овальное отверстие 124.
Хомут 126 и штанга 122, скользящая в отверстии вытянутой формы 124, образуют совместно скользящий стыковочный орган 120. Приводной механизм 24 приводит в движение, через этот скользящий стыковочный орган 120, второе устройство 110, перемещение которого соответствует зоне мертвого хода. В самом деле, пока штанга 122 перемещается внутри отверстия вытянутой формы 124 вплоть до блокировки ее перемещения концом последнего, ее перемещение не вызывает никакого движения органа 115 управления, другими словами движения приводного механизма (гидроцилиндра 24) не вызывают никакого движения органа 115 управления устройства 110.
Следует также отметить, что согласно другому варианту изобретения (не описанному в описании), конец 62 кабеля 60 управления может быть непосредственно присоединен к концу рычага 36 следящего направляющего ролика 26' (см. фиг.1), что позволяет получить длину хода, идентичную длине хода первого управляемого устройства 10 (кольцо 22 управления ступени 10 лопаток с переменным углом установки). Этот вариант изобретения предназначен для того случая применения, когда для управления вторым устройством не требуется увеличения длины хода управления.
Для облегчения понимания работы системы 1 управления, на фиг.2-4 показано движение этой системы в трех положениях, соответствующих минимальному, промежуточному и максимальному выдвижениям штока приводного механизма 24. В системе 1 управления, перемещение приводного механизма 24 представляет собой параметр управления этим приводным механизмом.
На фиг.2 показано, например, начало управления этими устройствами. В самом начале своего срабатывания (см. фиг.2) приводной механизм находится в положении, соответствующем минимальному выдвижению его штока, и лопатки 14 с переменным углом установки находятся в открытом положении.
Начиная с этого положения, воздействие приводного механизма 24 приводит к вращению пилотного направляющего ролика 26, а за ним и другого следящего направляющего ролика 26', приводимого в движение посредством синхронизационной рейки 30. Вращение направляющего ролика 26 вокруг его поворотной оси, находящейся на узле 28, приводит в свою очередь в движение поводок 32, который заставляет поворачиваться в итоге в одну или другую сторону кольцо 22 вокруг оси Х-Х турбомашины. Как это было показано выше, вращение кольца 22 вызывает одновременное изменение углового положения лопаток 14 ступени 10, осуществляемое посредством рычагов 18 управления.
С другой стороны, вращение направляющего ролика 26' приводит во вращение, с изменением угла передачи относительно вращения направляющего ролика 26', дополнительный направляющий ролик 44. Изменение угла связано с тем обстоятельством, что поворот следящего направляющего ролика 26' заставляет ось (рычаг 48) дополнительного направляющего ролика 44 пройти очень близко от поворотной точки на корпусе компрессора (поворотная опора 54). В этих условиях очень слабое вращение следящего направляющего ролика 26' вызывает очень сильное (относительно) вращение дополнительного направляющего ролика 44.
Вращение дополнительного направляющего ролика 44 вызывает скольжение как кабеля 60 управления внутри его оболочки, так и хомута 126, которые толкают рычаг 46 дополнительного направляющего ролика 44.
Фиг.3 соответствует особому положению штока приводного механизма 24 при его выдвижении.
При выдвижении приводным механизмом 24 своего штока, кабель 60 управления толкает хомут 126 и штангу 122 в овальное отверстие 124 в направлении стрелки А. Положение, представленное на фиг.3, соответствует в точности тому моменту, когда штанга 122, жестко связанная с хомутом 126, упирается в конец отверстия 124, двигаясь в направлении стрелки А (которое представляет собой, для органа 115 управления, направление приложения воздействия), причем это положение, начиная с которого штанга 122 начинает перемещать орган управления (пластина 115) устройства 110 с изменяемой геометрией. И наоборот, начиная с начала выдвижения штока приводного механизма 24 и вплоть до достижения им этого положения, орган 115 управления не покидает своего исходного положения (см. фиг.2), и это несмотря на перемещение хомута 126. Поэтому диапазон управления приводного механизма 24, между его исходным положением (см. фиг.2) и промежуточным положением (см. фиг.3), представляет собой зону мертвого хода для второго управляемого устройства 110.
Начиная со специфического положения или положения начала управления, представленного на фиг.3, любое дополнительное перемещение приводного механизма 24 вынуждает штангу 122, жестко связанную с хомутом 126, выталкивать в направлении стрелки А орган 115 управления и вызывает перемещение последнего. Положения приводного механизма 24, заходящие за это положение или соответствующие ему, представляют собой диапазон управления вторым устройством 110.
Кроме того, следует отметить, что как только приводной механизм 54 превышает это положение начала управления, пружина 112 срабатывает как средство возврата, позволяющее удержать орган 115 управления в постоянном контакте со штангой 122. Таким образом, орган 115 управления отслеживает в каждый момент времени перемещения штанги 122, как в направлении стрелки А, так и в противоположном направлении. И, наоборот, на протяжении мертвого хода скользящего стыковочного органа 120, орган 115 управления остается блокированным в положении «низкое» на фиг.2 и 3.
Наконец, система управления содержит датчик 114 положения, расположенный вблизи устройства с изменяемой геометрией и способный передавать информацию, касающуюся положения устройства 110 с изменяемой геометрией. В рассматриваемом варианте реализации изобретения, датчик 114 предназначен для определения положения органа 115 управления устройства 110 с изменяемой геометрией и передачи этой информации в электронный блок 100 управления.
Ниже, со ссылкой на фиг.5 описан вариант реализации системы 2 управления согласно изобретению. На этом чертеже показан особый случай, в котором второе устройство с изменяемой геометрией представляет собой систему 210 отбора воздуха, состоящую из набора устройств 136 отбора воздуха.
Система управления 2 очень близка по своей работе системе, описанной со ссылкой на фиг.1-4; причем для одинаковых элементов сохранены те же ссылочные позиции.
На фиг.5 показан частичный разрез турбомашины 150, которая представляет собой турбореактивный двухконтурный двигатель. Во входной части турбомашины 150 поток воздуха, поступающий в турбомашину, разделяется на первичный поток 146 и вторичный поток 148. Первичный поток представляет собой окислитель топлива, обеспечивающий возможность горения топлива, впрыскиваемого в камеру сгорания.
Первая часть энергии, высвободившейся в результате сжигания топлива, используется посредством первой турбины (турбины высокого давления) в основном первом блоке турбомашины, то есть в корпусе 151 высокого давления. Корпус высокого давления получил такое название ввиду того, что газы, входящие в состав первичного потока, сжимаются перед их впуском в камеру сгорания до высокого давления компрессором 152, называемым компрессором высокого давления, часть которого показана на фиг.5.
Вторая часть энергии, высвободившейся в результате сжигания топлива, используется посредством второй турбины во втором основном блоке турбомашины в корпусе 153 низкого давления. Этот корпус низкого давления содержит, по меньшей мере, одну ступень лопаток (лопатки воздуходувки), приводимых во вращение таким образом, чтобы создавать за счет реакции наибольшую часть тяги, создаваемой турбомашиной 150.
В силу указанных особенностей, корпусы высокого и низкого давления относительно независимы один от другого; в частности, это касается пределов скоростей вращения. Из этого следует, что команды, подлежащие подаче их устройству, могут быть обоснованы, в зависимости от конкретного случая, соображениями, полностью отличными или независимыми друг от друга.
Как известно, при прохождении вторичного потока воздуха по турбомашине в направлении из ее входной части в выходную, вторичный поток воздуха подвергается сжатию вначале в компрессоре низкого давления, а затем - в компрессоре высокого давления; потом он попадает в камеру сгорания, а затем расширяется, проходя последовательно через турбины высокого и низкого давления. Компрессор высокого давления располагается таким образом за компрессором низкого давления.
Первичный 146 и вторичный 148 потоки проходят через турбомашину 150 по ее кольцеобразным концентрическим проходам, обозначенным ссылочными позициями 156 и 158, соответственно. Проход 156 первичного потока проходит между наружным 138 и внутренним обтекателями 140. Проход 158 вторичного потока проходит между наружным обтекателем, не представленным в описании, который представляет собой внутренний обтекатель гондолы, и внутренним обтекателем 142.
Система 2 управления располагается между обтекателями 138 и 142, отделяющими друг от друга первичный и вторичный потоки.
Как правило, управление положением лопаток ступеней лопаток с переменным углом установки осуществляется в зависимости от давления окружающей среды и скорости вращения корпуса высокого давления.
С другой стороны, как правило, управление открытием устройств 136 отбора воздуха выполняется в зависимости от давления окружающей среды и расхода воздуха на выходе из компрессора низкого давления. Таким образом, отбор воздуха из вторичного потока за компрессором низкого давления производится для того, чтобы изменить режим работы этого компрессора.
Несмотря на то что обычные параметры управления ступенями лопаток с переменным углом установки и устройствами отбора воздуха, о которых уже упоминалось выше, и отличаются друг от друга, система 2 управления позволяет, тем не менее, осуществлять управление двумя устройствами: с одной стороны - ступенями 10, 10', 10” лопаток с переменным углом установки; и с другой стороны - устройством 210 с изменяемой геометрией, состоящим из набора устройств 136 отбора воздуха.
Ступени 10, 10' и 10” лопаток с переменным углом установки содержат соответственно три ряда лопаток 14, 14' и 14”, способных поворачиваться вокруг осей 16, 16', 16”. Два лопастных колеса 15, 15' с установленными на них подвижными лопатками 17, 17' вставлены между ступенями 10 и 10', 10' и 10”, соответственно.
В целях упрощения, на чертеже представлено управление только первой ступенью 10 лопаток и не представлено управление другими ступенями 10', 10”. Управление этой ступенью идентично управлению, приведенному при описании фиг.1-4. Второе управляемое устройство представляет собой набор устройств 136 отбора воздуха. В нижеследующем описании описано только одно устройство отбора воздуха; однако в действительности, турбомашина содержит целый набор идентичных устройств, распределенных в обтекателе 138 по всей периферии турбомашины и управляемых аналогично управлению вышеописанным устройством 136 отбора воздуха.
Устройство 136 отбора воздуха выполняет несколько функций. Одна из функций заключается в том, чтобы в случае чрезмерной перегрузки влагой воздуха, засасываемого в турбомашину (дождем, снегом или градом), обеспечивалось удаление из первичного потока части этого воздуха во избежание нарушения процесса сжигания топлива, которое может произойти вследствие присутствия чрезмерного количества воды в горючей смеси. Другая функция устройства отбора воздуха заключается в разгрузке контура первичного потока в случае сильного торможения, или же в случае пониженного режима. Команда, выданная приводным механизмом 24, передается устройству 136 отбора воздуха, кабелю 60, хомуту 126 и органу 115 управления. Кабель 60 прикреплен к обтекателям 138, 142 посредством опор 130 и 132. Опора 130 служит также средством направления при перемещении хомута 126 и органа 115 управления.
Управление устройством 136 отбора воздуха несколько отличается от управления устройством, показанным на фиг.1-4, а именно тем, что средство возврата (пружина 212) отличается по своей сути от пружины 112, представленной на фиг.1-4.
Устройство 136 отбора воздуха способно поворачиваться вокруг оси 134 поворота (вращение по стрелке I). Как правило, оно закрыто и возвращается в закрытое положение с помощью пружины 212. Один конец пружины 212 закреплен на опоре 160, жестко связанной с обтекателем 142, тогда как другой конец воздействует с силой возврата на приводной рычаг 144, жестко связанный с устройством 136 отбора воздуха, которое закрывает устройство 136 отбора воздуха.
Для открытия устройства 136, управление приводным механизмом 24 должно производиться тогда, когда последний находится в таком положении выдвижения своего штока, которое достаточно для перемещения органа 115 управления устройства 136 отбора воздуха (то есть за специфическим положением, представленным на фиг.3). Начиная с этого специфического положения и вне его или начиная с положения начала управления, параметр приводного механизма 24 меняет свое значение в диапазоне управления устройством 136 отбора воздуха. Первым следствием этого является то, что лопаткам 14 придается, в тех случаях, когда необходимо открыть устройство 136 отбора воздуха, угол установки, соответствующий сильному сжатию приводного механизма 24.
В этом диапазоне управления хомут 126 перемещает орган 115 управления устройства 136 отбора воздуха. Этот орган 115 управления имеет форму пластины, продолжением которой является штанга 119. Конец штанги 119 опирается на приводной рычаг 144. Орган 115 управления при своем перемещении толкает рычаг 144, вызывая тем самым вращение и открытие устройства 136.
Воздух, отбираемый из первичного потока устройством 136 отбора воздуха, отводится затем во вторичную струю (этот этап не представлен на фиг.5). Этот воздух добавляется к воздуху, содержащемуся во вторичном потоке, движение которого ускоряется вследствие действия вентиляторных лопаток.
Когда приводной механизм раздвинут или удлинен, то в тот момент, когда необходимо закрыть устройство 136 отбора воздуха, кабелем 60 управления затягивают назад хомут 126 и орган 115 управления. Устройство отбора воздуха 136 тогда закрывается под действием пружины 212.
На фиг.6 представлена система 220 расцепления, входящая в состав системы управления двумя устройствами с изменяемой геометрией, состоящей из двух различных корпусов, причем второй из них представляет собой устройство 310. Система 220 расцепления сопоставима с системой расцепления, вариант реализации которой представлен на фиг.1-4, состоящей из скользящего стыковочного органа 120в. Как и последняя, система расцепления 220 также позволяет создавать зону «мертвого хода».
Система расцепления 220 предназначена для размещения на конце кабеля 60 управления. Конец кабеля 60 прикреплен к приводной рейке 222, которая перпендикулярна оси В кабеля. Система 220 расцепления содержит также орган 215 управления. Последний содержит вытянутое в сторону оси В овальное отверстие 224, в которое проходит рейка 222. Таким образом, рейка 222 способна вызывать поступательное движение органа 215 управления как только последний упрется в конец овального отверстия 224. Работающая на сжатие пружина 312 возврата располагается между первым концом 217 органа 215 управления и опорой 360, жестко связанной с неподвижной частью 362 турбомашины. Пружина 312 воздействует на орган управления по оси B в направлении, соответствующем первому направлению перемещения кабеля 60 (стрелка С), при этом ее усилие прилагается к концу 217 органа 215 управления.
Работа системы расцепления происходит следующим образом:
В первом диапазоне значений приводного механизма, воздействующего на кабель 60 управления, штанга 222 упирается в конец овального отверстия 224, и пружина 312 сжимается. Движения органа управления 215 идентичны движениям штанги 222.
Во втором диапазоне значений приводного механизма, как только пружина 312 расправилась и достигла своего максимального удлинения, она уже более не играет никакой роли. Штанга 222 может под действием кабеля 60 перемещаться дальше, причем без того, чтобы возникала необходимость в перемещении органа 215 управления. Этот второй диапазон значений параметра управления представляет собой, таким образом, зону мертвого хода для второго управляемого устройства 310.
Орган 215 управления непосредственно не воздействует на это второе управляемое устройство 310. Второй конец 219 органа 215 управления, в противоположность первому концу 217, шарнирно прикреплен к концу 232 рычага 230. Другой конец 234 этого рычага 230 шарнирно прикреплен к управляемому устройству 310. Рычаг 230 позволяет таким образом увеличить, с коэффициентом, способным быть выше, равным или меньшим единицы, перемещение органа 215 управления; или даже изменить направление управления.
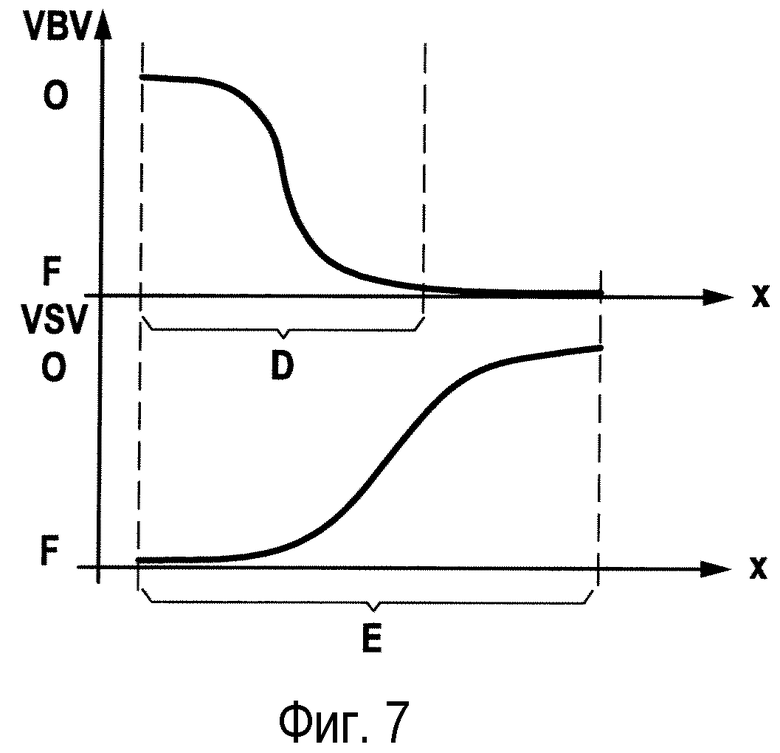
На фиг.7 показано на более высоком теоретическом уровне, каким образом происходит управление двумя устройствами посредством системы управления, имеющей в своем составе устройство расцепления, подобное устройству 220 с фиг.6.
Этот чертеж касается случая, когда первое управляемое устройство представляет собой ступень лопаток с переменным углом установки VSV, и когда второе устройство состоит из набора вентилей отбора воздуха VBV.
По абсциссе x отложены изменения параметра приводного механизма, то есть более или менее значительные выдвижения штока приводного механизма 24. Этот параметр x меняется между положением, которое соответствует замедленному или пониженному режиму работы турбомашины, и финальным положением, которое соответствует максимальному режиму турбомашины.
По ординате отложены углы открытия соответственно лопаток с переменным углом установки VSV и заслонок отбора воздуха VBV. Углы меняются для каждого из двух устройств в диапазоне между двумя положениями, обозначенными буквами O (открыт) и С (закрыт). Закон управления ступенью лопаток VSV представлен нижней кривой. Он демонстрирует постепенное открытие лопаток, в диапазоне управления Е. В соответствии с компоновкой системы управления, открытие может быть более или менее резким, что выражается наличием у этой кривой более или менее выраженного наклона.
Закон управления заслонками отбора воздуха VBV представлен верхней кривой. Заслонки отбора воздуха VBV закрываются постепенно, по мере того как увеличивается параметр управления x (выдвижение штока приводного механизма 24), внутри соответственно диапазона управления D.
Как это видно из фиг.7, в диапазоне закрытия заслонок отбора воздуха VBV, который соответствует относительно слабым режимам турбомашины, лопатки с переменным углом установки VSV по существу закрыты; и только в том случае, когда заслонки отбора воздуха VBV совершенно закрыты, начинается открытие лопаток с переменным углом установки VSV.
Точно также, только после полного закрытия заслонок отбора воздуха VBV начнется открытие лопаток с переменным углом установки VSV. Это позволяет понять, что при использовании единого приводного механизма, входящего в состав системы управления согласно изобретению, возможно точное управление положением как лопаток с переменным углом установки, так и заслонок отбора воздуха.
Устройство 120 расцепления на фиг.1-5 имело зону мертвого хода в начале диапазона изменения параметра управления.
Напротив, в устройстве 220 расцепления, используемом в системе управления с фиг.7, зона мертвого хода располагается в конце диапазона изменения параметра управления (для значений, отложенных на абсциссе x).
Система управления работает таким образом, чтобы при закрытии заслонок отбора воздуха VBV начало открытия лопаток VSV происходило в процессе закрытия заслонок VBV (то есть так, чтобы лопатки VSV начинали открываться, частично открываясь с открытием, меньшим 50%, например, меньшим 20%). Такая работа системы облегчается благодаря применению устройства усиления управления, которое позволяет обеспечить полное закрытие заслонок VBV в диапазоне управления Н, отличающемся, однако, слабой амплитудой. Таким образом, за счет использования соответствующего устройства усиления можно управлять устройством 310 с изменяемой геометрией в режиме уменьшенного диапазона управления, составляющего, например, 20%, даже 10% или даже 5% от полного диапазона управления приводного механизма.
Затем, при закрытых или, по меньшей мере, по существу закрытых заслонках отбора воздуха VBV, система управления способна и позволяет реализовать наибольшие возможности по закрытию лопаток ступени лопаток с переменным углом установки. Таким образом, в том случае, когда заслонки VBV закрыты и таким образом не могут быть приведены в движение приводным механизмом, последний остается полностью готовым к работе для воздействия на другое устройство и регулирования работы последнего, а именно лопаток ступени лопаток с переменным углом установки.
Система управления двумя устройствами с изменяемой геометрией в турбомашине содержит приводной механизм, воздействующий на оба устройства с изменяемой геометрией. Одно из устройств с изменяемой геометрией является лопаточным устройством, содержащим ступень лопаток статора с переменным углом установки. Другое из устройств с изменяемой геометрией является клапанным устройством, представляющим собой клапан отбора воздуха. Лопаточное устройство является частью корпуса высокого давления турбомашины, а клапанное устройство является частью корпуса низкого давления турбомашины. Система управления выполнена с возможностью управления постепенным открытием ступени лопаток и постепенным закрытием клапана отбора воздуха по мере возрастания значения параметра управления приводным механизмом. Другое изобретение группы относится к турбомашине содержащей указанную выше систему управления. Группа изобретений позволяет снизить массу и габариты системы управления двумя устройствами с изменяемой геометрией. 2 н. и 11 з.п. ф-лы, 7 ил.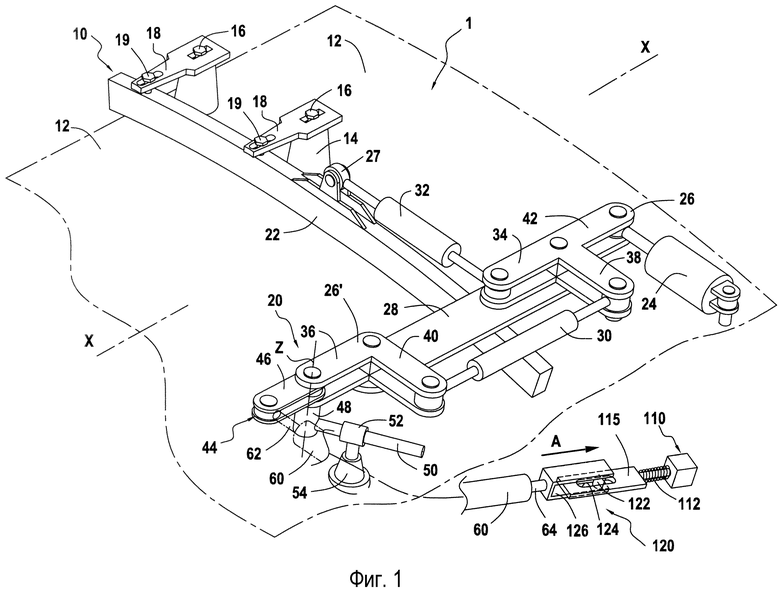
1. Система управления для управления, по меньшей мере, двумя устройствами с изменяемой геометрией в турбомашине, имеющей корпус высокого давления и корпус низкого давления, причем система содержит приводной механизм (24), который воздействует на два устройства (22, 110, 210) из указанных, по меньшей мере, двух устройств с изменяемой геометрией, при этом одно из указанных двух устройств с изменяемой геометрией является лопаточным устройством, имеющим, по меньшей мере, одну ступень (10) лопаток (14) статора с переменным углом установки, а другое из указанных двух устройств с изменяемой геометрией является клапанным устройством, представляющим собой клапан (136) отбора воздуха для корпуса турбомашины, причем лопаточное устройство является частью корпуса высокого давления, а клапанное устройство является частью корпуса низкого давления, отличающаяся тем, что она выполнена с возможностью управления постепенным открытием ступени лопаток и постепенным закрытием клапана отбора воздуха по мере возрастания значения параметра управления приводным механизмом.
2. Система по п.1, отличающаяся тем, что она выполнена с возможностью закрытия клапана отбора воздуха таким образом, что лопатки (14) статора с переменным углом установки начинают открываться во время закрытия клапана отбора воздуха по мере постепенного увеличения значения параметра управления приводным механизмом.
3. Система по п.1, отличающаяся тем, что, когда клапан отбора воздуха по существу закрыт, система управления выполняет основную функцию, заключающуюся в открытии лопаток ступени лопаток статора с переменным углом установки.
4. Система по п.1, отличающаяся тем, что ступень (10) лопаток образована из множества лопаток (14, 14'), каждая из которых установлена с возможностью поворота на корпусе (12) турбомашины, и кольца (22) управления, окружающего корпус и соединенного с каждой из лопаток (14) ступени соответствующими рычагами (18), при этом приводной механизм выполнен с возможностью поворота кольца (22) управления ступенью (10) посредством приводного органа (26), шарнирно установленного на корпусе (12).
5. Система по п.1, отличающаяся тем, что приводной механизм содержит подвижный орган управления (26), своими перемещениями передающий команды на оба устройства.
6. Система по п.1, отличающаяся тем, что приводной механизм (24) выполнен с возможностью приведения в действие первого из устройств путем изменения параметра в диапазоне (D) управления первого устройства, за пределами которого он не может воздействовать на первое устройство, при этом приводной механизм (24) выполнен с возможностью приведения в действие второго из устройств путем изменения параметра в рабочем диапазоне (С) второго устройства, за пределами которого он не может воздействовать на второе устройство, причем, по меньшей мере часть диапазона (D) управления первым устройством находится за пределами диапазона (С) управления вторым устройством.
7. Система по п.6, отличающаяся тем, что диапазон (С) управления вторым устройством входит в диапазон управления первым устройством.
8. Система по п.1, отличающаяся тем, что соединение между приводным механизмом (24) и одним из устройств (110) содержит устройство (120) расцепления, выполненное с возможностью отсоединения привода этого устройства (110) приводным механизмом (24) в диапазоне значений параметра (x) управления приводного механизма.
9. Система по п.8, отличающаяся тем, что устройство расцепления содержит первый орган (115) управления, выполненный с возможностью перемещения в свободном пространстве второго органа управления (126), причем это пространство образует зону мертвого хода для второго устройства (110).
10. Система по п.9, отличающаяся тем, что она дополнительно содержит средства (112, 212) возврата, которые удерживают орган (115) управления одного из устройств (110, 210) в заданном положении, по меньшей мере, когда параметр (x) приводного механизма изменяется в диапазоне, находящемся за пределами диапазона (С) управления устройством (110, 210).
11. Система по п.1, отличающаяся тем, что она дополнительно содержит устройство (20) усиления управления, присоединенное между приводным механизмом и одним из устройств.
12. Система по п.4, отличающаяся тем, что она дополнительно содержит устройство (20) усиления управления, присоединенное между приводным механизмом и одним из указанных двух устройств, причем устройство усиления управления содержит следящий орган (26'), шарнирно установленный на корпусе компрессора, и дополнительный поворотный орган (44), установленный между следящим органом (26') и клапанным устройством, для передачи команды от приводного механизма (24) на клапанное устройство, при этом дополнительный поворотный орган (44) установлен с возможностью вращения как на корпусе (12) компрессора, так и на следящем органе (26').
13. Турбомашина, отличающаяся тем, что она содержит систему управления по любому из пп.1-12.
| US 4403912 A, 13.09.1983 | |||
| МЕТАЛЛОРЕЖУЩИЙ СТАНОК | 2012 |
|
RU2611230C2 |
| US 6742324 B2, 01.06.2004 | |||
| US 4292802 A, 06.10.1981 | |||
| US 3638428 A, 01.02.1972 | |||
| СТАТОР КОМПРЕССОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2287064C2 |

