Предлагаемое техническое решение относится к космической, ракетной и морской технике и может быть использовано для раскрытия и автоматической установки в рабочее положение несущей управляющей плоскости летательного аппарата (ЛА) или механизмов одноразового действия, используемых после длительного хранения в состоянии готовности к действию.
Известен привод несущей управляющей плоскости ЛА с силовым цилиндром (Т.М.Башта. Гидравлические приводы летательных аппаратов. М., Машиностроение, 1967, стр.206, рис.138а), содержащий корпус, поршень со штоком, причем поршень делит внутреннюю камеру силового цилиндра на две полости.
Конструкция известного привода выполнена таким образом, что возможно только прямолинейное движение рабочего органа (поршня). Для обеспечения дополнительных функций - вращение несущей управляющей плоскости ЛА или другого механизма вокруг продольной оси, конструкция привода значительно усложняется, что приводит к существенному увеличению массы и габаритов привода.
Целью предлагаемого технического решения является устранение указанных недостатков: уменьшение массы и габаритов привода несущей управляющей плоскости ЛА при выполнении им продольного и вращательного движений.
Указанная цель достигается тем, что в предлагаемом приводе несущей управляющей плоскости летательного аппарата, содержащем неподвижно установленный корпус, силовой цилиндр, поршень со штоком, кинематически связанный с управляющей плоскостью, силовой цилиндр установлен в корпусе на подшипниках с возможностью вращения относительно своей продольной оси, надпоршневая полость камеры силового цилиндра выполнена в виде газовой герметичной и негерметичной полостей, а герметичная полость под поршнем заполнена жидкостью, в негерметичной газовой полости кинематическая связь штока поршня с управляющей плоскостью выполнена в виде качалки, рычага и соединяющих их осей, причем оси качалки и рычага установлены на корпусе силового цилиндра, рычаг жестко соединен с управляющей плоскостью, а отверстие в качалке для установки оси крепления качалки со штоком поршня выполнено в виде прорези.
Установка силового цилиндра на подшипниках позволяет уменьшить габариты привода и снизить его массу за счет отсутствия дополнительных механизмов, необходимых для придания несущей управляющей плоскости ЛА возможности вращения вокруг своей оси.
Установка осей качалки и рычага на корпусе силового цилиндра позволяет уменьшить габариты привода за счет уменьшения габаритов качалки, рычага.
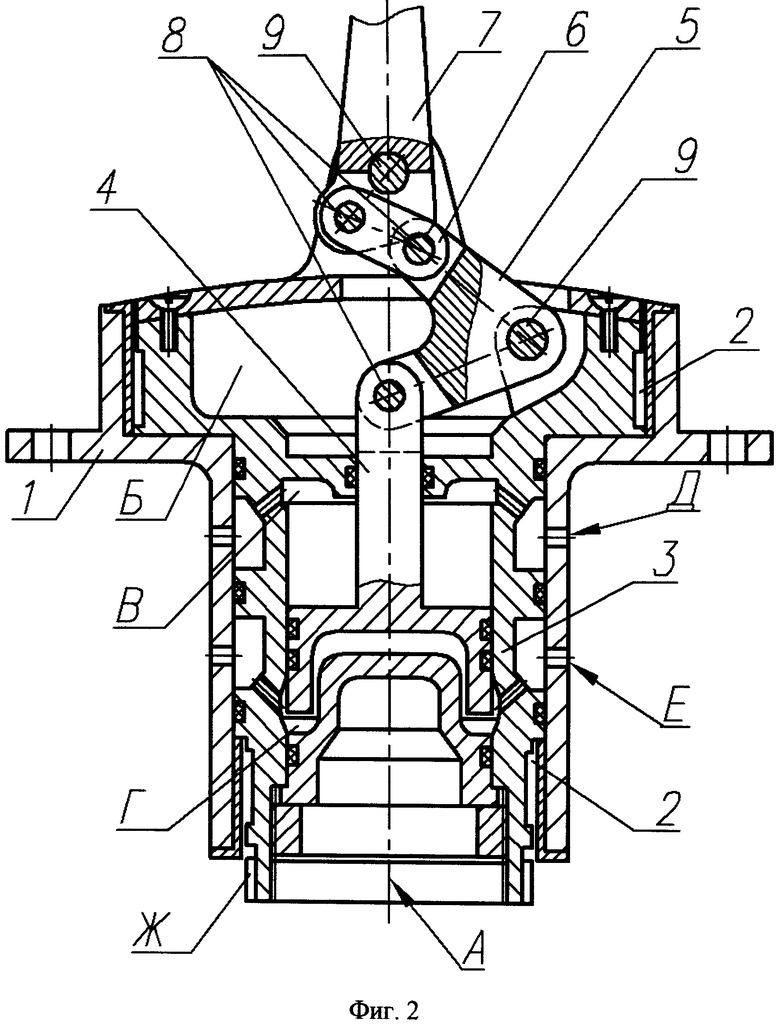
Конструкция предлагаемого привода несущей управляющей плоскости ЛА в исходном положении показана на фиг.1.
Привод состоит из: неподвижно установленного корпуса 1, подшипников 2, силового цилиндра 3, поршня 4, качалки5, рычага 6, несущей управляющей плоскости 7, осей 8, 9.
Неподвижно установленный корпус 1 привода представляет собой цилиндрический фланец, крепящийся на корпус изделия. Внутри него на подшипниках 2 установлен силовой цилиндр 3. Подшипники позволяют вращаться силовому цилиндру вокруг оси А. Внутренняя камера силового цилиндра над поршнем 4 разделена на негерметичную полость Б и герметичную полость В. Герметичная жидкостная полость полость Г находится под поршнем. В негерметичной полости силового цилиндра поршень посредством качалки 5, рычага 6 и осей 8 кинематически связан с управляющей плоскостью 7. Несущая управляющая плоскость и качалка шарнирно соединены с силовым цилиндром с помощью осей 9 и могут поворачиваться вокруг этих осей.
Работает привод несущей управляющей плоскости ЛА следующим образом. Рабочий газ из специальной емкости под рабочим давлением через отверстие Д неподвижно установленного корпуса, кольцевую проточку и просверленные каналы силового цилиндра поступает в надпоршневую герметичную газовую полость. Поршень под действием силы давления рабочего газа движется поступательно, увлекая за собой качалку, которая вращаясь вокруг оси 9, в свою очередь вызывает плоскопараллельное движение рычага, связанного осью с несущей управляющей плоскостью. В результате поступательное движение поршня преобразуется во вращательное движение несущей управляющей плоскости вокруг оси 9.
Как только поршень под действием силы давления рабочего газа приходит в движение, из жидкостной полости начинает вытесняться демпфирующая жидкость, которая необходима для обеспечения постоянной скорости раскрытия несущей управляющей плоскости при различных нагрузках, действующих на несущую управляющую плоскость в момент ее раскрытия. Постоянная скорость раскрытия несущей управляющей плоскости может быть достигнута различными путями, например установкой демпфера, а также установкой на сливе демпфирующей жидкости из отверстия Е дроссельного пакета или регулятора постоянного расхода.
Конструкция предлагаемого привода несущей управляющей плоскости ЛА в рабочем положении показана на фиг.2.
После установки несущей управляющей плоскости в рабочее положение осуществляется управление указанной плоскостью поворотом ее вокруг оси А. Для осуществления этого поворота прикладывается усилие от управляющего силового агрегата ЛА к приводу, для чего на силовом цилиндре предусмотрены шлицы Ж.
Предложенное техническое решение позволяет уменьшить габариты и вес привода, обеспечивая продольно-вращательное движение несущей управляющей плоскости ЛА, необходимое для ее функционирования, в сравнении с ближайшим аналогом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидродинамическая система разделения элементов конструкции | 2021 |
|
RU2754611C1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| Способ изготовления системы разделения элементов конструкции | 2021 |
|
RU2763219C1 |
| АВИАЦИОННОЕ КАТАПУЛЬТНОЕ УСТРОЙСТВО | 2004 |
|
RU2259933C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОПРИВОДОМ | 2003 |
|
RU2266236C2 |
| СИЛОВАЯ УСТАНОВКА | 1998 |
|
RU2133848C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| СИЛОВАЯ УСТАНОВКА | 1988 |
|
RU2008465C1 |
| Рулевой привод управляемых ракеты и снаряда | 2017 |
|
RU2661944C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2001 |
|
RU2207300C2 |
Изобретение относится к космической, ракетной и морской технике и касается раскрытия и автоматической установки в рабочее положение несущей управляющей плоскости летательного аппарата (ЛА). Привод несущей управляющей плоскости ЛА содержит неподвижно установленный корпус, силовой цилиндр, поршень со штоком, кинематически связанный с управляющей плоскостью. Силовой цилиндр установлен в корпусе на подшипниках с возможностью вращения относительно своей продольной оси. Надпоршневая полость камеры силового цилиндра выполнена в виде газовой герметичной и негерметичной полостей, а герметичная полость под поршнем заполнена жидкостью. В негерметичной газовой полости кинематическая связь штока поршня с управляющей плоскостью выполнена в виде качалки, рычага и соединяющих их осей. Оси качалки и рычага установлены на корпусе силового цилиндра. Рычаг жестко соединен с управляющей плоскостью. Отверстие в качалке для установки оси крепления качалки со штоком поршня выполнено в виде прорези. Достигается уменьшение массы и габаритов привода несущей управляющей плоскости ЛА при выполнении им продольного и вращательного движений. 2 ил.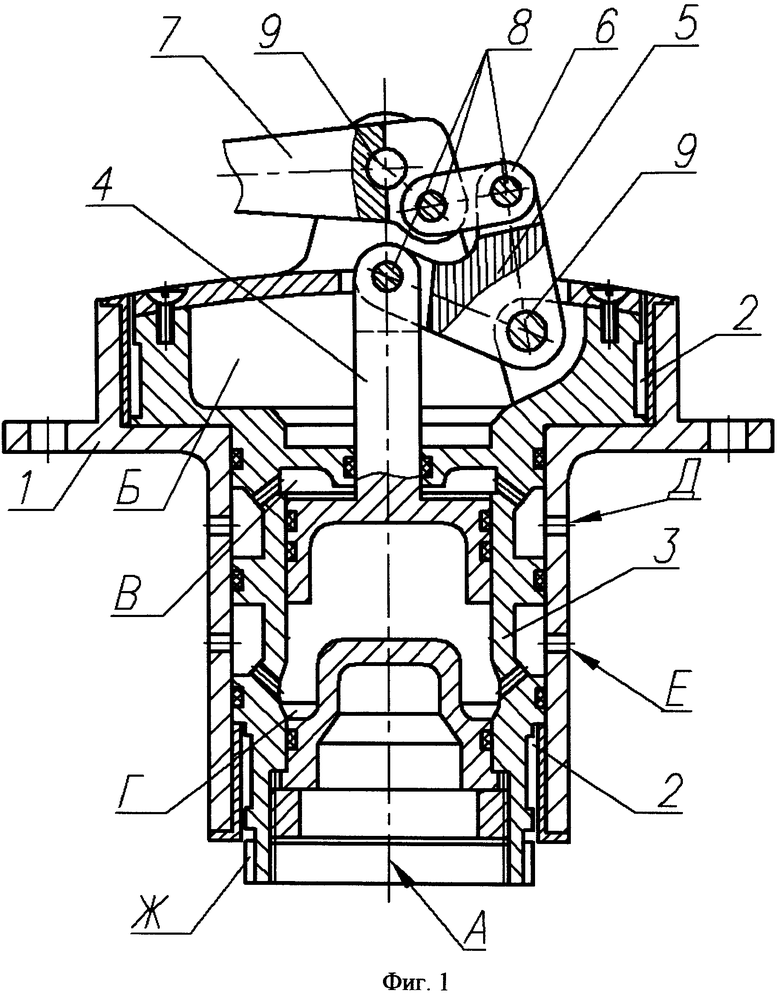
Привод несущей управляющей плоскости летательного аппарата, содержащий неподвижно установленный корпус, силовой цилиндр, поршень со штоком, кинематически связанный с управляющей плоскостью, отличающийся тем, что силовой цилиндр установлен в корпусе на подшипниках с возможностью вращения относительно своей продольной оси, надпоршневая полость камеры силового цилиндра выполнена в виде газовой герметичной и негерметичной полостей, а герметичная полость под поршнем заполнена жидкостью, в негерметичной газовой полости кинематическая связь штока поршня с управляющей плоскостью выполнена в виде качалки, рычага и соединяющих их осей, причем оси качалки и рычага установлены на корпусе силового цилиндра, рычаг жестко соединен с управляющей плоскостью, а отверстие в качалке для установки оси крепления качалки со штоком поршня выполнено в виде прорези.
| US 6073880 A, 13.06.2000 | |||
| РАКЕТА, ИМЕЮЩАЯ МЕХАНИЗМ РАЗВЕРТЫВАНИЯ УБИРАЮЩИХСЯ СТАБИЛИЗАТОРОВ | 2003 |
|
RU2320952C2 |
| US 5040745 A, 20.08.1991 | |||
| ПРИВОД СТАБИЛИЗАТОРА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2001 |
|
RU2198807C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА САМОЛЕТА | 2006 |
|
RU2326022C1 |

