Изобретение относится к области управления движением летательных аппаратов, в частности к электрогидравлическим и электропневматическим рулевым приводам управляемых ракет и снарядов.
Рулевые приводы предназначены для поворота органов управления движением и стабилизацией управляемой ракеты или управляемого снаряда в соответствии с командами, поступающими на вход системы (Б.Г. Крымов, Л.В. Рабинович, В.Г. Стеблецов. «Исполнительные устройства систем управления летательными аппаратами», М., «Машиностроение», 1987 г., стр. 3).
Известны электрогидравлические и электропневматические рулевые приводы, которые широко применяются в ракетной технике (см., там же, стр. 29, стр. 109).
В состав электрогидравлического (электропневматического) рулевого привода управляемых ракеты и снаряда входят (см. там же, стр. 36, рис. 2.3 и стр. 116, рис. 3.4) сумматор, электронный усилитель мощности, электромеханический преобразователь, гидравлический (пневматический) распределитель жидкости (газа), силовой цилиндр, поршень со штоком, который через кинематические звенья связан с рулём, датчик обратной связи.
Электрогидравлический и электропневматический приводы обладают высоким быстродействием, энергоемкостью и компактностью.
Недостатками указанных приводов являются:
1. Переменная, зависящая от угла поворота руля, величина плеча, через которое поступательное перемещение штока силового цилиндра преобразуется в угловое перемещение руля, что приводит к изменению, в зависимости от угла поворота руля, момента, действующего относительно оси поворота руля, при неизменном усилии на штоке (при больших углах поворота руля значение момента стремится к нулю). Для того чтобы обеспечить заданный момент на всех углах поворота руля, возникает необходимость в увеличении плеча, что приводит к увеличению хода штока для обеспечения заданного угла поворота руля и к увеличению расхода рабочего тела (жидкости или газа) для обеспечения заданной угловой скорости поворота руля. В результате увеличиваются габариты силового цилиндра, возрастают энергетические затраты или ограничиваются углы поворота руля.
2. Нелинейная зависимость между перемещением штока силового цилиндра и перемещением руля, наличие люфтов в кинематике, связывающей шток силового цилиндра и руль, а также упругость кинематических звеньев в сочетании с трением в их шарнирных соединениях приводят к фазовым и амплитудным искажениям в перемещении руля относительно перемещения штока силового цилиндра, следовательно, к несоответствию угла отклонения руля относительно корпуса ракеты или снаряда управляющему сигналу, так как датчик обратной связи, сигнал которого соответствует управляющему сигналу, входит в состав силового цилиндра и измеряет положение штока силового цилиндра относительно его корпуса.
3. Отношение величины хода штока к величине угла поворота руля увеличивается по мере отклонения руля от его среднего положения, что приводит к увеличению линейного размера силового цилиндра.
Вышеназванные проблемы во многом решены в RU 2535811 (дата публикации 20.12.2014 г., F15B 15/06). В источники описан неполноповоротный исполнительный механизм, в состав которого входит двуплечий рычаг, рабочие поверхности которого выполнены по эвольвенте, преобразующий поступательное перемещение штоков силовых цилиндров во вращательное выходного звена. Преимущество такого механизма заключается в постоянстве величины плеча, через которое поступательное перемещение штока силового цилиндра преобразуется в угловое перемещение выходного звена. Это обстоятельство обеспечивает независимость от угла поворота выходного звена момента, действующего относительно оси вращения выходного звена, при неизменном усилии на штоке силового цилиндра, и постоянство отношения величины хода штока к величине угла поворота руля во всем диапазоне отклонения руля. Кроме того, к преимуществам такого механизма относится отсутствие люфтов в кинематике, преобразующей поступательное перемещение штока силового цилиндра во вращательное выходного вала.
Однако применить данное решение в рулевом приводе управляемых ракете и снаряде невозможно по той причине, что исполненный в едином корпусе эвольвентный привод невозможно установить в состав рулевого привода управляемых ракеты и снаряда из-за отсутствия свободного места.
Настоящее изобретение направлено на решение задачи по созданию электрогидравлического/электропневматического рулевого привода управляемых ракеты и снаряда, лишенного указанных недостатков с возможностью реализации всех преимуществ привода: независимость располагаемого момента от хода поршней, уменьшение энергопотребления, уменьшение хода поршней, отсутствие люфтов, а также повышение точности отработки управляющего сигнала рулем.
Предложенное решение позволяет обеспечить достижение технического результата, заключающегося в повышении точности отработки рулем управляемой ракеты и снаряда команд управления, поступающих на вход рулевого привода, в уменьшении энергопотребления, в частности при увеличении величины максимального угла отклонения руля.
Технический результат достигается за счет того, что двуплечий рычаг 10 закреплен неподвижно на валу 11, ось вращения которого совпадает с осью вращения руля, неподвижно закрепленного на одной из торцевых поверхностей вала 11, а корпусы силовых цилиндров 5 закреплены неподвижно на корпусе ракеты или снаряда 13; при этом ротор датчика обратной связи 14 закреплен неподвижно на второй торцевой поверхности вала 11, а статор датчика 15 закреплен неподвижно на корпусе ракеты или снаряда 13.
Сущность изобретения поясняется чертежами.
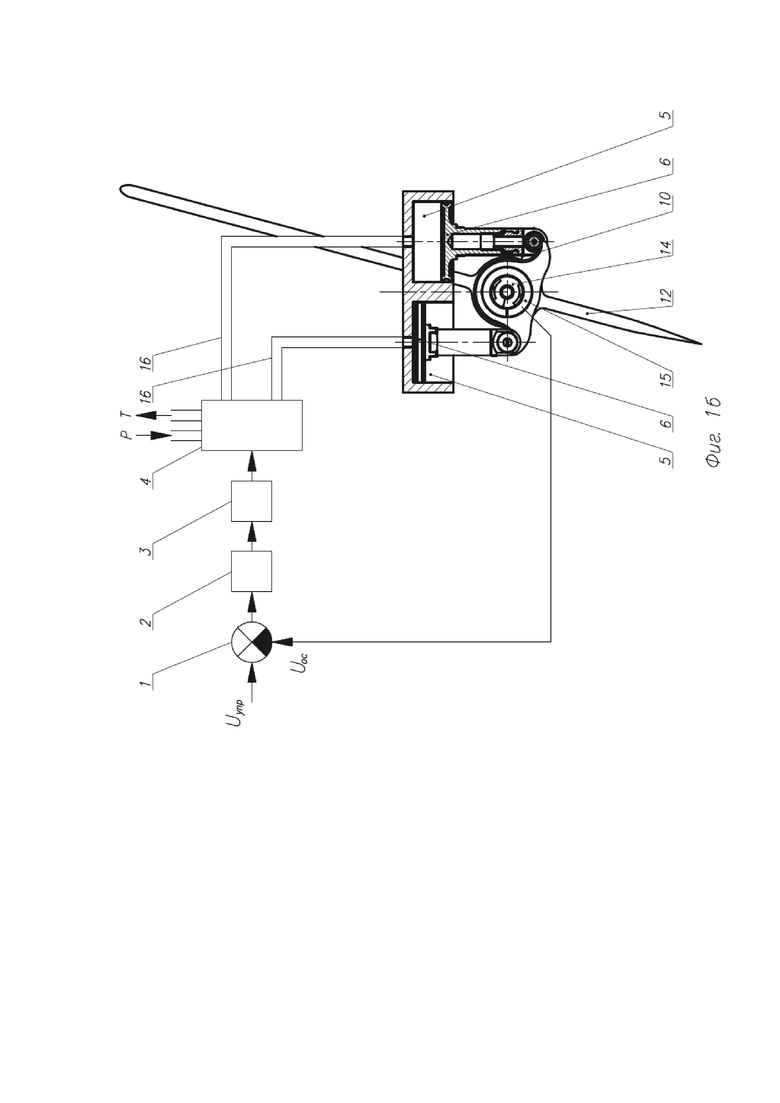
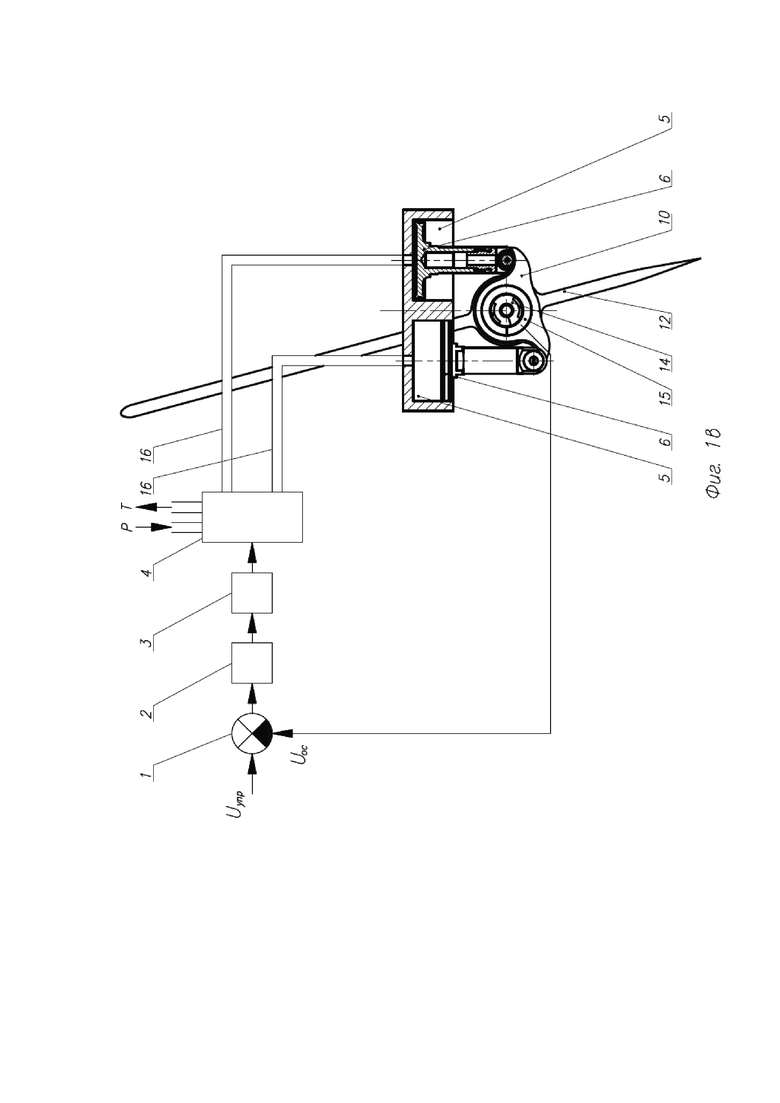
На фиг. 1 приведена функциональная схема привода: на фиг.1а - при расположении руля 12 в среднем положении; на фиг.1б - при повороте руля по часовой стрелке; на фиг. 1в – при повороте руля против часовой стрелки.
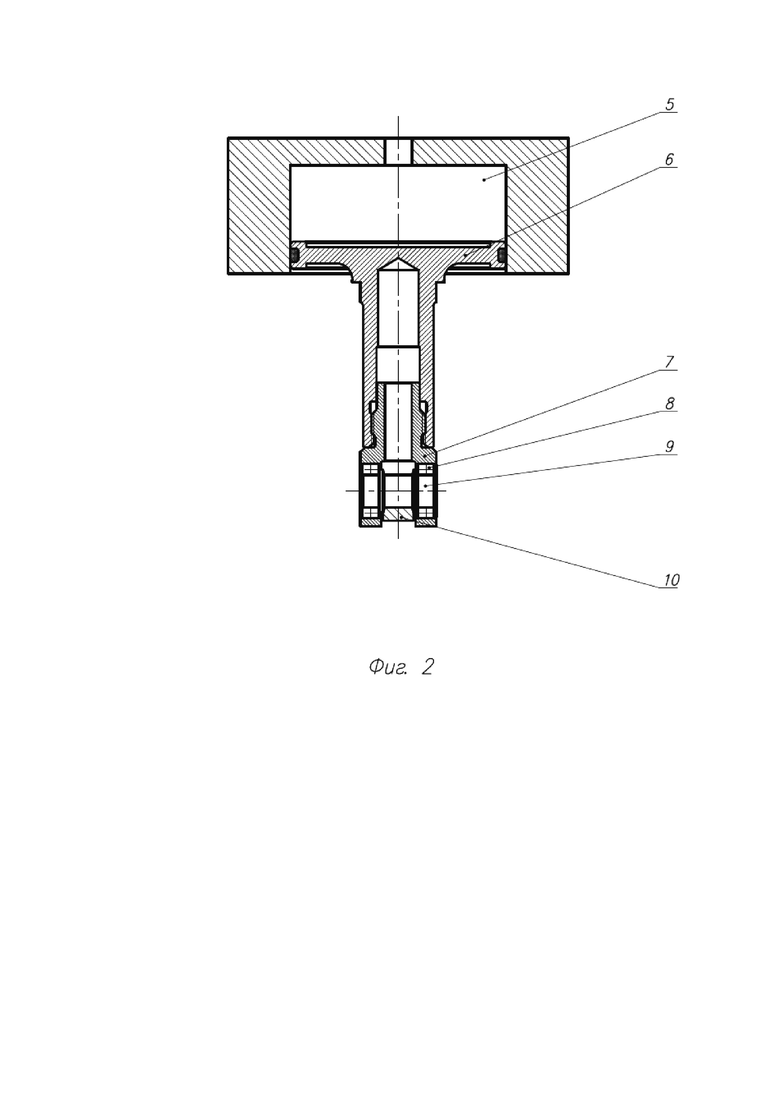
На фиг. 2 приведено сечение привода плоскостью, проходящей через ось поршня, и параллельной оси вала.
На фиг. 3 приведено сечение привода плоскостью, проходящей через ось, относительно которой происходит поворот вала и руля привода.
Рулевой привод управляемых ракеты и снаряда включает: сумматор 1; электронный усилитель мощности 2; электромеханический преобразователь 3; гидравлический (пневматический) распределитель 4, подключенный к источнику гидравлического (пневматического) питания; силовые цилиндры 5; поршни 6, в каждом из которых неподвижно закреплен толкатель 7 (фиг. 2), в проушинах которого установлены подшипники 8; оси 9, закрепленные во внутренних обоймах подшипников 8; двуплечий рычаг 10, рабочие поверхности которого выполнены по эвольвенте; вал 11 (фиг. 3); руль 12; корпус ракеты или снаряда 13; ротор датчика обратной связи 14; статор датчика обратной связи 15; гидравлические (пневматические) линии 16 (фиг. 1), соединяющие выходы распределителя 4 с рабочими полостями силовых цилиндров 5.
В отличие от известных решений в заявленном изобретении двуплечий рычаг 10 закреплен неподвижно на валу 11. Ось вращения вала 11 совпадает с осью вращения руля 12, который неподвижно закреплен на одной из торцевых поверхностей вала 11. Ротор датчика обратной связи 14 закреплен неподвижно на второй торцевой поверхности вала 11, что позволяет измерять перемещение руля непосредственно. Статор датчика 15 закреплен неподвижно на корпусе ракеты или снаряда 13. Корпусы силовых цилиндров 5 закреплены неподвижно на корпусе ракеты или снаряда 13. В результате предложенная конструкция обеспечивает постоянство отношения величины хода штока к величине угла поворота руля во всем диапазоне отклонения руля, а также из-за отсутствия люфтов повышается точность отработки управляющего сигнала рулем.
Рулевой привод управляемых ракеты и снаряда работает следующим образом.
В исходном положении (фиг. 1а) сигнал управления (Uупр) и сигнал обратной связи (Uос), поступающие на входы сумматора 1, равны нулю; соответственно равны нулю сигналы, поступающие с выхода сумматора 1 на вход электронного усилителя мощности 2 и с выхода электронного усилителя мощности 2 на вход электромеханического преобразователя 3. Выходные звенья электромеханического преобразователя 3 и гидравлического (пневматического) распределителя 4, поршни 6 и связанный с ними через двуплечий рычаг 10 руль 12 находятся в среднем положении. Давления жидкости (газа) в рабочих полостях силовых цилиндров 5 равны между собой. При изменении управляющего сигнала (Uупр) на выходе сумматора 1 появляется сигнал, отличный от нуля, который усиливается электронным усилителем мощности 2 и с его выхода поступает на вход электромеханического преобразователя 3. Выходное звено электромеханического преобразователя 3 отклоняется от среднего положения, в результате смещается из среднего положения выходное звено гидравлического (пневматического) распределителя 4. Объем жидкости (газа), поступающей в рабочую полость одного из силовых цилиндров 5 через соответствующую гидравлическую (пневматическую) линию 16, соединяющую эту полость с выходом распределителя 4, увеличивается. Давление жидкости (газа) в этой полости возрастает, расположенный в ней поршень 6 начинает выдвигаться. Поступательное перемещение поршня 6 (фиг. 2) через толкатель 7, подшипник 8 и ось 9 передается двуплечему рычагу 10 и преобразуется в угловое перемещение вала 11 (фиг. 3), связанных с ним руля 12 и ротора датчика обратной связи 14. При повороте двуплечего рычага 10 усилие, действующее на него со стороны выдвигающегося поршня 6, передается второму поршню 6 (фиг. 1), который начинает вдвигаться, вытесняя жидкость (газ) через вторую линию 16 в линию слива гидравлической (пневматической) системы. При повороте ротора датчика обратной связи 14 электрический сигнал на выходе статора датчика обратной связи 15 (Uос) изменяется до тех пор, пока не становится равным сигналу управления (Uупр). Соответственно сигналы на выходе сумматора 1 и на выходе электронного усилителя мощности обнуляются, а выходные звенья электромеханического преобразователя 3 и гидравлического (пневматического) распределителя 4 устанавливаются в требуемое положение. В зависимости от полярности сигнала управления (Uос) руль 12 из среднего положения (Фиг.1а) поворачивается или по часовой стрелке (Фиг.1б), или против (Фиг.1в).
Таким образом, руль управляемой ракеты или снаряда отклоняется на угол, пропорциональный управляющему сигналу на входе рулевого привода, при этом располагаемый момент на руле остается неизменным, а люфты в кинематических звеньях отсутствуют. Отсутствие люфтов и возможность непосредственного измерения угла поворота руля повышает точность отработки рулем управляемой ракеты и снаряда команд управления, поступающих на вход рулевого привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРОВЕРКИ РАЗВИВАЕМОГО МОМЕНТА ЭЛЕКТРОПНЕВМАТИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ РАКЕТ И СНАРЯДОВ | 2003 |
|
RU2249173C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2172927C1 |
| ДВУХКАНАЛЬНЫЙ ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224214C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| СПОСОБ ОЦЕНКИ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ЦЕПИ ПОТЕНЦИОМЕТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗИ РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2236668C2 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |


Изобретение относится к области управления движением летательных аппаратов и, в частности, к электрогидравлическим и электропневматическим рулевым приводам управляемых ракет и снарядов. Технический результат – повышение точности отработки рулем управляющих команд. Рулевой привод устройства включает сумматор. Он связан с электронным усилителем мощности. В состав устройства входят также электромеханический преобразователь, руль, датчик обратной связи, гидравлический или пневматический распределитель и силовые цилиндры с поршнями. Поршни взаимодействуют через толкатели с двуплечим рычагом. Его рабочие поверхности выполнены по эвольвенте. Двуплечий рычаг закреплен неподвижно на валу. Его ось вращения совпадает с осью вращения руля. Он неподвижно закреплен на одной из торцевых поверхностей вала. Корпуса силовых цилиндров закреплены неподвижно на корпусе ракеты или снаряда. Ротор датчика обратной связи закреплен неподвижно на второй торцевой поверхности вала. Статор датчика закреплен неподвижно на корпусе ракеты или снаряда. 5 ил.
Рулевой привод управляемых ракеты и снаряда, включающий сумматор (1), связанный с электронным усилителем мощности (2), электромеханический преобразователь (3), гидравлический или пневматический распределитель (4), силовые цилиндры (5) с поршнями (6), взаимодействующие через толкатели (7) с двуплечим рычагом (10), рабочие поверхности которого выполнены по эвольвенте, руль (12), датчик обратной связи (12), отличающийся тем, что двуплечий рычаг (10) закреплен неподвижно на валу (11), ось вращения которого совпадает с осью вращения руля (12), неподвижно закрепленного на одной из торцевых поверхностей вала (11), а корпусы силовых цилиндров (5) закреплены неподвижно на корпусе ракеты или снаряда (13), ротор датчика обратной связи (14) закреплен неподвижно на второй торцевой поверхности вала (11), а статор датчика (15) закреплен неподвижно на корпусе ракеты или снаряда (13).
| НЕПОЛНОПОВОРОТНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2013 |
|
RU2535811C1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ НЕПОЛНОПОВОРОТНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 0 |
|
SU262573A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД | 2001 |
|
RU2212576C2 |
| Ленточный транспортер с замыкаемым в трубу несущим органом | 1960 |
|
SU142186A1 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| СПОСОБ НАНЕСЕНИЯ ГОЛОГРАФИЧЕСКОЙ МЕТКИ | 2001 |
|
RU2195400C1 |

