Заявляемый способ калибровки магнитного компаса (МК) пешехода относится к способам построения устройств, предназначенных для калибровки МК, используемых на подвижных объектах. Способ может быть использован, преимущественно, для оперативной калибровки автономной навигационной системы пешехода с целью повышения точности определения азимута передвижения при отсутствии сигналов глобальных навигационных систем (ГНС).
Известно, что для определения азимута передвижения пешехода могут использоваться ГНС, сигналы которых, однако, не всегда доступны из-за особенностей местоположения пешехода (горы, леса, здания и т.п.). Альтернативой ГНС в этом случае могут служить инерциальные навигационные системы, основной составной частью которых является МК. Идеальным является случай, когда магнитометр имеет одинаковую чувствительность по горизонтальным осям, фиг.1, а достижение этой цели обычно называют калибровкой. В заявляемом способе понятие калибровки рассматривают шире и объединяют с устранением девиации МК.
Точность навигационных измерений при помощи магнитометров связана с искажениями магнитного поля и/или условий его измерения, связанными с:
1. Несовпадением магнитной оси Земли с осью ее вращения.
2. Локальными магнитными аномалиями территории природного и техногенного происхождения.
3. Девиацией магнитного поля Земли (МПЗ) под действием металлических предметов, входящих в экипировку пешехода.
4. Влиянием особенностей динамики движения конкретного пешехода на положение нестабилизированной измерительной платформы с МК.
Искажения МПЗ проявляются в неправильном определении азимута движения, который вычисляется как:
Ψ=arctg(Hy/Hx),
где Ну и Нх - горизонтальные составляющие МПЗ, в расчете которых учтен возможный наклон измерительной платформы МК.
Искажения МПЗ принято разделять на HARD и SOFT - искажения.
К первым, фиг.lb, относятся искажения, обусловленные аддитивной суммой вида:
Ну=sin*A±B или Hx=cos*A±C,
где А - истинный азимут движения, а В и С - искажения местного МПЗ, приводящие к сдвигу центра окружности, описываемой графиком диаграммы чувствительности (Ну, Нх), относительно начала координат.
SOFT искажения, фиг.1с, описываются выражениями:
Ну=D*sinA, D<1 или

что может относиться и к Нх-компоненте МПЗ, причем эти искажения могут проявляться в различных сочетаниях. Графически указанные искажения проявляются в том, что вместо окружности график (Ну, Нх) становится эллипсом, который при Е=0 расположен строго горизонтально или вертикально - в зависимости от того, на какой из компонент МПЗ присутствует искажение D<1. При Е≠0 эллипс наклоняется. Направление наклона определяется знаком погрешности Е.
Установлено, что погрешности типа Hard описываются в виде одного периода, а - типа Soft - двух периодов гармонического колебания на всем интервале определения азимута (0-360 град).
Присутствие обеих погрешностей приводит к суммированию этих гармонических функций с различными начальными фазами и амплитудами. Более того, как показал опыт моделирования, для точной аппроксимации суммы Hard и Soft погрешностей иногда следует привлекать и гармоники с периодами, равными 1/2 и 1/4 от периода основной частоты.
Известен способ калибровки МК пешехода для прибора HMR3400 фирмы Honeywell [1], стр.4, заключающийся в том, что постоянно измеряют компоненты МПЗ трехосным магнитометром при медленном вращении МК в горизонтальной плоскости вокруг вертикальной оси. Данный способ позволяет привести диаграмму чувствительности МК к круговой форме.
Аналогичные способы калибровки МК применяются в навигаторах бытового назначения, к которым, как правило, не предъявляется высоких требований по точности.
Недостатком такого способа является низкая точность, связанная с тем, что не учитываются пп.3, 4 перечня искажений магнитного поля, приведенного выше. Кроме того, при плоском вращении МК не устраняются погрешности, описываемые выражением (1) при Е≠0, и не устраняется девиация МК.
Известен способ калибровки МК пешехода [2], заключающийся в том, что измеряют сигналы всех осей МК при его медленном вращении вокруг вертикальной оси по конусной поверхности, так, чтобы все оси МК изменяли свое положение. При этом появляется дополнительная (по сравнению с предыдущим случаем) возможность учета наклонов измерительной платформы и использования полученных данных для калибровки. В остальном недостатки данного способа совпадают с предыдущим вариантом.
Известен также способ калибровки МК пешехода [3], заключающийся в измерении сигналов трехосных МК и акселерометров с вычислением матрицы компенсационных коэффициентов. Акселерометры (инклинометры) позволяют определить текущее положение измерительной платформы в статическом положении или при медленных наклонах измерительной платформы с МК, пересчитать с использованием указанной матрицы показания магнитометров и вычислить азимут.
Недостатком данного способа является низкая точность в случае, когда носителем платформы является человек. Сложный и персональный характер динамики изменения положения тела человека (платформы с магнитометром) во время ходьбы делает решение задачи виртуальной стабилизации платформы при помощи акселерометров крайне затруднительным. А найденный азимут оказывается неточным.
Наиболее близким к заявляемому способу калибровки магнитного компаса является [4], заключающийся в том, что постоянно измеряют сигналы всех осей МК, а также его положение с использованием аппаратуры потребителя ГНС, вычисляют магнитный Ам и истинный Au азимуты передвижения подвижного объекта. Рассогласование между ними (составляющее сумму девиации МК и влияния Hard и Soft погрешностей) используется для коррекции показаний МК и для вычисления набора неизвестных параметров (углов наклона измерительной платформы и параметров Soft и Hard погрешностей), при этом применяются данные о координатах подвижного объекта. Способ предназначен для использования на транспортных средствах и представляет собой способ постоянного уточнения МК по данным ГНС, т.е. калибровки МК в процессе работы.
Недостатком такого способа является его низкая точность, особенно при калибровке МК, используемого при движении пешехода, поскольку:
- определение разности между магнитным и истинным азимутами в процессе работы подвижного объекта позволяет в последующем учесть указанную разность, однако, не позволяет скомпенсировать Soft составляющую ошибки, т.е. для полноценной калибровки МК требуется специальная процедура;
- функции чувствительности, применяемые в способе [4], могут быть использованы только в зоне относительно малых значений определяемых неизвестных;
- способ предполагает, что в зоне выборки определяемые параметры постоянны, что для пешехода не характерно даже на интервале менее секунды, в особенности это относится к углам наклона платформы, а поскольку период поступления данных от ГНС составляет одну секунду, то неизбежны дополнительные погрешности в определении поправки на азимут.
Задачей, решаемой заявляемым способом, является повышение точности оперативной калибровки автономной навигационной системы пешехода. Заявляемый способ позволяет в определенной степени учесть большинство из перечисленных выше источников погрешностей измерения магнитного поля.
Для решения поставленной задачи в способе калибровки магнитного компаса пешехода, заключающемся в том, что постоянно измеряют сигналы всех осей магнитного компаса, а также его положение с использованием аппаратуры потребителя глобальной навигационной системы, магнитный компас и аппаратуру потребителя глобальной навигационной системы размещают на конкретном пешеходе, оснащенном всем необходимым снаряжением для работы, в окрестности области деятельности пешехода выбирают и размечают Г-образную трассу калибровки, в виде двух горизонтальных, прямолинейных, ортогональных участков, по первому участку обеспечивают хорошую точность позиционирования для глобальной навигационной системы, при калибровке указанный пешеход перемещается в прямом и обратном направлении по каждому участку трассы, рассчитывают магнитные азимуты Ам перемещения пешехода по магнитному компасу, вычисляют истинные азимуты участков Au: на первом участке по сигналам глобальной навигационной системы, а на втором - по его ортогональности первому участку, вычисляют разности указанных магнитных и истинных азимутов ΔА=Ам-Au, при движении на каждом из участков трассы, аппроксимируют эти разности функцией 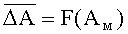

Существенными отличиями заявляемого способа от прототипа являются следующие решения.
Магнитный компас и аппаратуру потребителя ГНС размешают на конкретном пешеходе, который имеет определенный рост, манеру ходьбы и т.п., что позволяет учесть индивидуальные свойства пешехода при калибровке.
В прототипе индивидуальные особенности пешехода не рассматриваются.
Калибровка производится пешеходом, оснащенным всем необходимым снаряжением для работы. Наличие металлических предметов и их расположение по отношению к измерительной аппаратуре в экипировке пешехода способно существенно изменить распределение окружающего магнитного поля.
В прототипе влияние экипировки пешехода не рассматривается.
Калибровку производят в окрестности области деятельности пешехода, что позволяет учесть влияние местных магнитных аномалий.
В прототипе вопрос локализации калибровки не рассматривается.
Форма траектории калибровки в виде Г-образной трассы, состоящей из двух горизонтальных прямолинейных ортогональных участков, обеспечивает достаточно простой, оперативный выбор участка калибровки в полевых условиях. Первый участок должен иметь хорошую точность позиционирования для ГНС. Второй участок должен быть размечен геометрически относительно первого под углом 90° с помощью доступных средств измерения.
В прототипе уточнение показаний МК по данным ГНС производится в процессе работы подвижного объекта. Аналогичное действие может производиться и в заявляемом устройстве, но это не заменяет специальной процедуры калибровки на размеченной трассе.
При калибровке указанный пешеход перемещается в прямом и обратном направлении по каждому участку трассы. Такой подход позволяет создать ортогональный базис калибровки, в котором легко определяются основные векторы измерений.
В прототипе постоянное сравнение магнитных Ам и истинных Au (по данным ГНС) азимутов не позволяет получить такой базис.
Аппроксимация разности ΔА=Ам-Au магнитных азимутов Ам и истинных азимутов участков Au позволяет получить аналитическую зависимость
В прототипе производится аппроксимация методом наименьших квадратов разности между модельной и измеренной составляющей вектора магнитного поля Земли. Используемая модель существенно менее точна по сравнению с предлагаемой в заявляемом способе.
Заявляемый способ иллюстрируют следующие графические материалы:
Фиг.1 - диаграмма чувствительности магнитного компаса, где:
a) отсутствие искажений;
b) Hard искажения;
c) Soft искажения;
Нх, Ну - горизонтальные составляющие магнитного поля, вычисленные с учетом наклона измерительной платформы с МК.
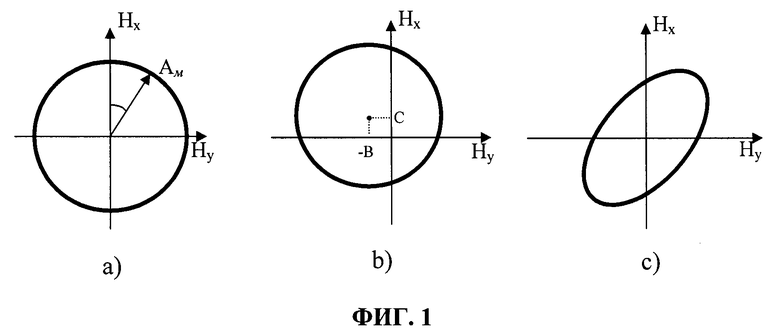
Фиг.2 - трасса калибровки, где:
OL и ОМ - участки Г-образной трассы, N - направление на истинный север.
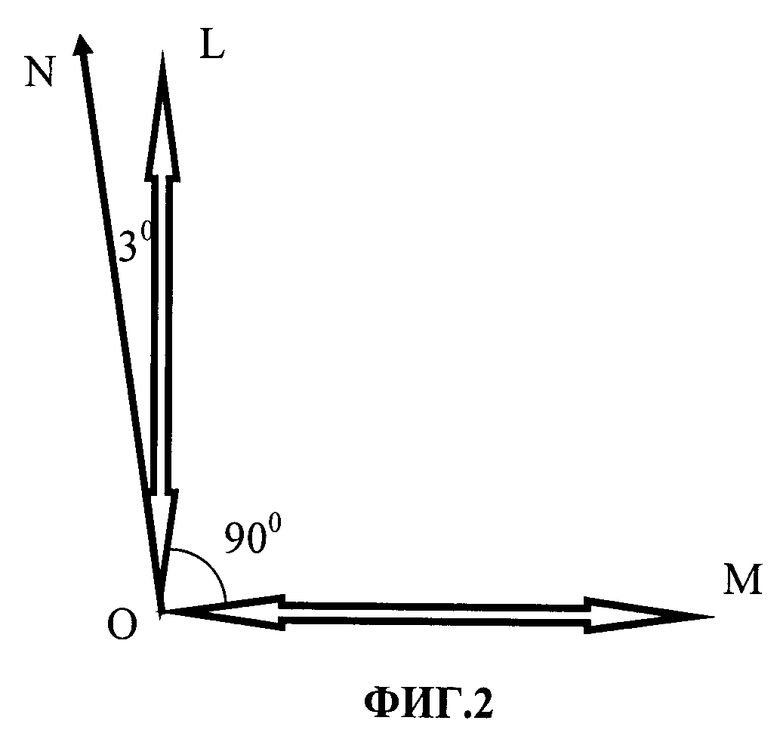
Фиг.3 - графики:
- значения ошибки ΔА=Ам-Au для каждого участка;
- аппроксимирующая функция
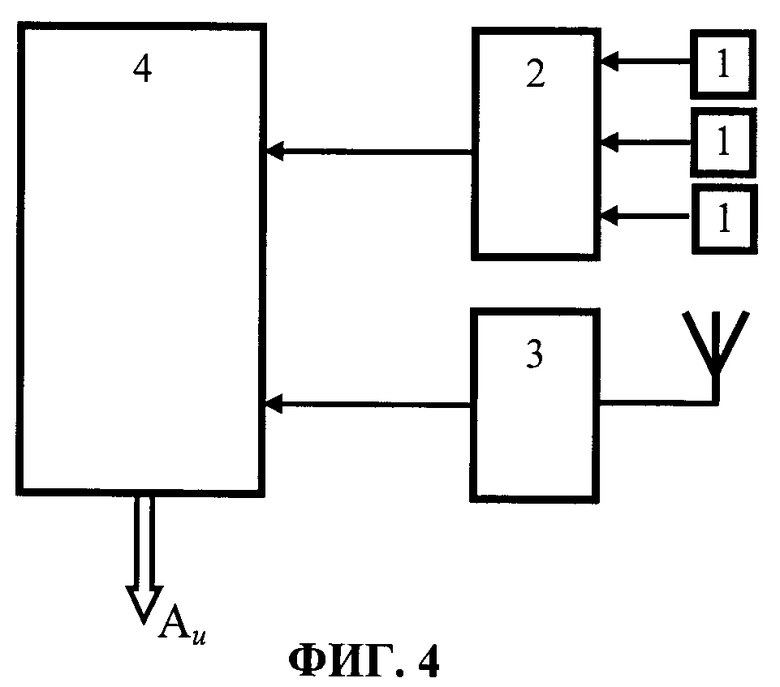
Фиг.4 - устройство калибровки МК, где:
1 - магнитометры;
2 - устройство сопряжения;
3 - аппаратура потребителя ГНС;
4 - компьютерный блок.
Магнитометры 1 предназначены для измерения компонентов магнитного поля. Такие магнитометры, как правило, встроены в плату автономной навигации.
Устройство сопряжения 2 предназначено для приема сигналов магнитометров, их усиления, преобразования в цифровую форму и передачи в компьютерный блок 4.
Аппаратура потребителя ГНС 3 предназначена для получения координат пешехода (измерительной платформы). Аппаратура потребителя содержит собственный компьютерный блок, который на фиг.4 не показан.
Компьютерный блок 4 предназначен для обработки результатов измерений и вычисления поправок, необходимых для вычисления. Компьютерный блок может быть реализован на микроконтроллере.
Рассмотрим возможность реализации заявляемого способа калибровки МК пешехода.
Перед началом калибровки на пешеходе, которому предстоит работать в интересующей зоне, размещают измерительную платформу, содержащую МК и аппаратуру потребителя ГНС, а также все необходимое снаряжение для работы пешехода по назначению. Обычный пешеход имеет в составе своего оснащения ограниченный состав предметов, способных повлиять на МПЗ. Военнослужащие, сотрудники чрезвычайных служб могут носить значительное количество разнообразного оружия и инструментов, способных оказать существенное влияние на МПЗ, поэтому калибровка производится при полной экипировке пешехода.
В окрестности предполагаемых действий пешехода могут быть местные аномалии МПЗ, поэтому калибровку следует производить именно там. Оперативный характер работ не позволяет выбрать и разметить трассу калибровки с множеством азимутов, хотя это могло бы повысить точность калибровки. В таких условиях выбирают Г-образный участок, фиг.2, содержащий два ортогональных участка OL и ОМ. Для первого участка калибровки OL, фиг.2, как правило, можно найти горизонтальный прямолинейный участок, на котором обеспечена хорошая точность позиционирования с помощью ГНС. Таким участком может быть дорога, тропинка, поле и т.п. В рассматриваемом примере участок OL имеет угол 3° с направлением на север. Второй участок ОМ, фиг.2, должен быть ортогонален первому. Его разметка может быть выполнена любыми топографическими измерительными средствами. При передвижении по размеченным участкам калибровки пешеход двигается более прямолинейно, чем это показывают средства измерения МПЗ и ГНС. Эксперименты показали, что для удовлетворительной точности протяженность участков калибровки должна составлять 70-90 метров.
Калибровка осуществляется путем перемещения пешехода последовательно по участкам OL, LO, ОМ и МО. Этим направлениям на фиг.3 соответствуют абсциссы 3°, 183°, 93°, 183°. На каждом из участков производятся многократные измерения компонент магнитного поля трехосными магнитометрами 1, фиг.4, которые усиливаются, преобразуются в цифровую форму в устройстве сопряжения 2 и вводятся в компьютерный блок 4. Для каждого из участков калибровки рассчитывают средние магнитные азимуты Aм перемещения пешехода по МК. На магнитные измерения оказывают влияние все перечисленные выше факторы, так что среднее значение магнитного азимута является их интегральной оценкой. На участке OL (LO) многократно измеряют координаты местоположения пешехода с использованием аппаратуры потребителя ГНС 3, которые также вводятся в компьютерный блок 4. На основе полученных данных ГНС в компьютерном блоке 4 вычисляют истинный азимут Au участка OL (LO), в качестве которого можно использовать среднее значение истинного азимута на участке. На втором участке ОМ (МО) истинный азимут Au определяется с учетом известного угла поворота относительно первого участка - 90°.
Вычисляют разности ΔА=Ам-Au указанных магнитных и истинных азимутов, фиг.3, при движении по каждому из участков трассы. Аппроксимируют эти разности
Аналитическое выражение


Таким образом, заявляемый способ калибровки магнитного компаса пешехода реализуем, обеспечивает простой, оперативный, интегральный учет большинства возмущающих факторов и позволяет повысить точность определения азимута перемещения пешехода системой автономной навигации по измерениям МПЗ.
Источники информации
1. http://www51.honevwell.com/aero/common/documents/mvaerospacecatalog-documents/Space-documents/Diqital Compass Solution HMR3400.pdf
2. Патент US 6877237.
3. Патент US 6543146.
4. Патент US 2012004843.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛЕВОЙ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА | 2018 |
|
RU2674535C1 |
| СПОСОБ КАЛИБРОВКИ ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2014 |
|
RU2572109C1 |
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| Способ автоматического размагничивания кораблей | 2018 |
|
RU2703765C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| БОРТОВОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ ЗЕМЛИ | 2008 |
|
RU2368872C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ЮСТИРОВКИ АНТЕНН РАДИОРЕЛЕЙНЫХ СТАНЦИЙ ПО МАКСИМАЛЬНОМУ УРОВНЮ ПРИНИМАЕМОГО СИГНАЛА | 2023 |
|
RU2806190C1 |
Заявляемый способ калибровки магнитного компаса (МК) пешехода относится к способам построения устройств, предназначенных для калибровки МК, используемых на подвижных объектах. Способ может быть использован, преимущественно, для оперативной калибровки автономной навигационной системы пешехода с целью повышения точности определения азимута передвижения пешехода при отсутствии сигналов глобальных навигационных систем (ГНС). Способ предполагает, что МК и аппаратуру потребителя ГНС размещают на конкретном пешеходе, оснащенном всем необходимым снаряжением для работы, в окрестности области деятельности пешехода выбирают и размечают Г-образную трассу калибровки, выполненную в виде двух горизонтальных, прямолинейных, ортогональных участков, по первому участку обеспечивают хорошую точность позиционирования для глобальной навигационной системы, при калибровке указанный пешеход перемещается в прямом и обратном направлении по каждому участку трассы, рассчитывают магнитные азимуты Ам перемещения пешехода по магнитному компасу, вычисляют истинные азимуты участков Au
:
на первом участке по сигналам глобальной навигационной системы, а на втором - по его ортогональности первому участку, вычисляют разности указанных магнитных и истинных азимутов ΔА=Aм-Au при движении на каждом из участков трассы, аппроксимируют эти разности функцией 

Способ калибровки магнитного компаса пешехода, заключающийся в том, что постоянно измеряют сигналы всех осей магнитного компаса, а также его положение с использованием аппаратуры потребителя глобальной навигационной системы, отличающийся тем, что
магнитный компас и аппаратуру потребителя глобальной навигационной системы размещают на конкретном пешеходе, оснащенном всем необходимым снаряжением для работы, в окрестности области деятельности пешехода выбирают и размечают Г-образную трассу калибровки, в виде двух горизонтальных, прямолинейных, ортогональных участков, по первому участку обеспечивают хорошую точность позиционирования для глобальной навигационной системы, при калибровке указанный пешеход перемещается в прямом и обратном направлении по каждому участку трассы, рассчитывают магнитные азимуты Ам
перемещения пешехода по магнитному компасу, вычисляют истинные азимуты участков Au: на первом участке по сигналам глобальной навигационной системы, а на втором - по его ортогональности первому участку, вычисляют разности указанных магнитных и истинных азимутов ΔА=Ам-Au при движении на каждом из участков трассы, аппроксимируют эти разности функцией 
| US 2012004843 A1, 05.01.2012 | |||
| US 6877237 B1, 12.04.2005 | |||
| US 6543146 B2, 08.04.2003 | |||
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| SU 1822248 A2, 20.01.1996. | |||

