Заявляемый способ относится к способам полевой калибровки магнитных компасов (МК), строящихся на основе трехосевых электронных магнитометров. МК могут устанавливаться на наземные неподвижные и подвижные объекты для высокоточных азимутальных определений в конкретной местности.
Известны способы калибровки МК [1]-[5] и многие другие, различающиеся по точности, сложности реализации, стоимости оборудования и трудоемкости операций. Всех их объединяет принадлежность к группе способов предварительной (заводской) калибровки, предназначенной для определения и последующей компенсации инструментальных (так называемых «внутренних») погрешностей - статических ошибок (смещения нулей) и различия коэффициентов чувствительности осей магнитометров. Главным недостатком, общим для всех способов группы, является неучет внешних возмущающих факторов - глобальных и локальных аномалий магнитного поля Земли (МПЗ) естественного и искусственного происхождения, присущих конкретной области местности практического применения МК. В большинстве случаев это приводит к грубым магнитометрическим погрешностям и, как следствие, низкой точности азимутальных определений в полевых условиях.
Наиболее близким к заявляемому способу является способ калибровки магнитного компаса [6] с использованием аппаратуры потребителя глобальных навигационных систем (ГНС), заключающийся в определении и сравнении магнитного АМ и истинного АИ азимутов. Способ предполагает размещение МК и аппаратуры потребителя ГНС на пешеходе и определение указанных азимутов при его перемещении в прямом и обратном направлении по ортогональным участкам Г-образной трассы, предварительно выбранной и размеченной в области местности практической деятельности пешехода. При этом используется расширенное понятие калибровки, объединяющее в общей (интегральной) оценке калибровочной разности ΔА=АМ-АИ инструментальные погрешности МК (при отсутствии или неучете заводской калибровки) и погрешности, вызванные аномалиями МПЗ. Очевидно, что основным фактором, влияющим на точность такой калибровки, является точность определения истинного азимута АИ, используемого как эталон.
Главными недостатками способа [6] являются низкая точность, сложность реализации и ограниченная область применения.
Причинами этого являются:
1. Большая методическая ошибка используемого алгоритма расчета азимута АИ по координатам пешехода, определяемым стандартной аппаратурой потребителя ГНС при его перемещении по коротким (длиной 70-90 метров) участкам Г-образной трассы.
2. Грубая оценка калибровочной разности ΔА для промежуточных значений азимута АМ по аппроксимирующей кривой, построенной только по четырем узловым точкам (фиг.3 описания прототипа).
3. Отсутствие возможности точной разметки горизонтальных, прямолинейных, ортогональных участков и строгого перемещения по ним пешехода при решении большинства практических задач в реальных условиях конкретной (в том числе пересеченной) местности.
4. Требование обязательного линейного перемещения несущей платформы МК (пешехода).
5. Необходимость предварительной разметки калибровочной трассы, что исключено при решении спасательных, военных, специальных и других оперативных задач.
6. Непригодность результатов калибровки, зависящих от индивидуальных особенностей пешехода, для применения в составе неподвижных и подвижных объектов (несущих платформ) других типов: транспорт, БПЛА, приборы целеуказания, средства топопривязки и др.
Принципиальным отличием заявляемого способа от прототипа является отсутствие необходимости размещения МК на пешеходе и его перемещения по предварительно размеченной трассе.
Задачами, решаемыми заявляемым способом, являются повышение точности, простота реализации и расширение области применения результатов полевой калибровки магнитного компаса.
Для решения указанных задач в способе полевой калибровки трехосевого магнитного компаса с использованием аппаратуры потребителя глобальных навигационных систем, заключающемся в определении и сравнении магнитного АМ и истинного АИ азимутов, совместно с магнитным компасом используют соосные с ним трехосевые акселерометр и датчик угловой скорости, которые размещают на поворотной платформе с неподвижным основанием в области местности практического применения магнитного компаса пользователем, при размещении обеспечивают параллельность их осей связанным осям платформы, аппаратуру потребителя с двумя выносными антеннами устанавливают вблизи основания платформы, антенны разносят в горизонтальной плоскости на расстояние, обеспечивающее заданную точность определения аппаратурой потребителя начального азимута АИ(0), начальную установку платформы выполняют ее горизонтированием путем сведения к нулю рассчитываемых по данным акселерометра углов тангажа и крена платформы и совмещением по направлению одной из ее горизонтальных осей с прямой, соединяющей антенны, одновременно магнитным компасом определяют начальный азимут АМ(0), при последующем круговом вращении платформы по данным магнитного компаса и углам тангажа и крена, рассчитываемым по данным акселерометра, определяют текущие дискретные значения азимута АМ(i), по данным датчика угловой скорости рассчитывают матрицу направляющих косинусов направлений на географические восток и север и местной вертикали относительно связанных осей платформы, по элементам которой определяют текущие дискретные значения азимута АИ(i), при этом начальное значение матрицы рассчитывают по нулевым углам тангажа и крена и начальному значению азимута АИ(0), по завершении полного оборота платформы формируют дискретную калибровочную последовательность парных значений АМ(i), АИ(i), i=0, l, …, которую при практическом применении магнитного компаса используют путем ее интерполяции для определения и выдачи пользователю азимута  по зафиксированному азимуту
по зафиксированному азимуту 
Технический результат заключается в повышении точности, а также простоте реализации и расширении области применения результатов калибровки магнитного компаса.
Существенные отличия заявляемого способа полевой калибровки магнитного компаса заключаются в следующем:
1. Использование совместно с магнитным компасом трехосевых акселерометра и датчика угловой скорости позволяет повысить информативную обеспеченность калибровки, благодаря измерениям дополнительных датчиков.
В прототипе для этого используется только ГНС с соответствующими погрешностями.
2. Измерительные датчики размещают на поворотной платформе с неподвижным основанием в области местности практического применения магнитного компаса пользователем, что позволяет проводить калибровку скрытно и на ограниченном пространстве.
В прототипе калибровка требует достаточно большого пространства и проводится сложно.
3. При размещении измерительных датчиков обеспечивают параллельность их осей связанным осям платформы.
В прототипе такая задача не решается.
4. Аппаратуру потребителя ГНС с двумя выносными антеннами устанавливают вблизи основания платформы, что упрощает калибровку.
В прототипе аппаратура потребителя размещается на пешеходе, что снижает точность измерений.
5. Антенны аппаратуры потребителя ГНС разносят в горизонтальной плоскости на расстояние, обеспечивающее заданную точность определения аппаратурой потребителя начального азимута АИ(0), что повышает точность определения последующих текущих значений азимута.
В прототипе значения азимута определяются с использованием ГНС при перемещении пешехода, т.е. с низкой точностью.
6. Начальную установку платформы выполняют ее горизонтированием путем сведения к нулю рассчитываемых по данным акселерометра углов тангажа и крена платформы и совмещением по направлению одной из ее горизонтальных связанных осей с прямой, соединяющей антенны, что позволяет повысить точность измерений.
В прототипе горизонтирование средств измерения, расположенных на пешеходе, не предусмотрено и невозможно.
7. Вращают платформу, при этом по данным магнитного компаса и углам тангажа и крена, рассчитываемым по данным акселерометра, определяют текущие дискретные значения азимута Am(i). Такой способ калибровки позволяет вести ее в ограниченном пространстве.
В прототипе калибровка проводится путем перемещения пешехода по заданному маршруту, что усложняет процесс калибровки, увеличивает ее продолжительность, а в некоторых условиях делает невозможной.
8. По данным датчика угловой скорости рассчитывают матрицу направляющих косинусов направлений на географические восток и север и местной вертикали относительно связанных осей платформы, по элементам которой определяют текущие дискретные значения азимута АИ(i).
В прототипе датчик угловой скорости не используется, а матрица направляющих косинусов не формируется.
9. Начальное значение матрицы направляющих косинусов рассчитывают по нулевым углам тангажа и крена и начальному значению азимута АИ(0).
В прототипе нет возможности измерить указанные углы.
10. По завершении полного оборота платформы формируют дискретную калибровочную последовательность парных значений АМ(i), АИ(i), i=0, l, ….
В прототипе также формируют аналогичную последовательность четырех парных значений, но с меньшей точностью.
11. При практическом применении магнитного компаса используют калибровочную последовательность путем ее интерполяции для определения и выдачи пользователю азимута по зафиксированному азимуту
по зафиксированному азимуту
В прототипе используют аппроксимацию четырех измеренных значений.
В совокупности перечисленные отличительные признаки обеспечивают устранение недостатков прототипа и решение поставленных задач.
Предлагаемый способ можно пояснить следующим образом.
Ориентация связанных осей X, Y, Z поворотной платформы (осей магнитного компаса) относительно направлений на магнитные восток ЕМ и север NМ и местной вертикали h определяется матрицей направляющих косинусов:

где АМ - магнитный азимут, β, γ - углы тангажа и крена платформы.
Из (1) видно, что горизонтальная и вертикальная составляющие магнитного поля НГ, НВ связаны с измерениями проекций НХ, HY, HZ МПЗ на оси чувствительности МК соотношениями: 
Разрешая систему уравнений (2) при измеренных значениях НХ, HY, HZ и известных углах β, γ относительно неизвестного азимута АМ, приходим к
выражению:

При круговом вращении платформы по дискретным значениям проекций НХ(i), HY(i), HZ(i) и углов β(i), γ(i) в соответствии с выражением (3) рассчитывается последовательность текущих значений азимута АМ(i).
В силу отсутствия линейного ускорения платформы (основание платформы неподвижно), чувствительными осями акселерометра, работающего в режиме инклинометра, при вращении фиксируются текущие проекции aX(i), aY(i), aZ(i) вектора ускорения силы тяжести g, по которым рассчитываются значения углов β(i), γ(i):

Необходимость расчета углов вызвана тем, что, несмотря на начальное горизонтирование платформы (начальные углы β(0), γ(0) органами индикации и управления платформой оператором сводятся к нулю), при последующем круговом вращении даже опытный оператор, проводящий калибровку, неизбежно допустит те или иные отклонения платформы по тангажу и крену от плоскости местного горизонта. Учет углов Pβ(i), γ(i) при вычислении текущего азимута АМ(i) по формуле (3) обеспечивает виртуальное (аналитическое) горизонтирование поворотной платформы.
Ориентация направлений на географические восток Е и север N и местной вертикали h относительно связанных осей X, Y, Z поворотной платформы (осей ДУС) определяется матрицей направляющих косинусов:

где АИ - истинный азимут, β, γ - прежние углы тангажа и крена.
При круговом вращении платформы по дискретным значениям угловых скоростей ωХ(i), ωY(i), ωZ(i), измеряемым ДУС, рассчитывают значения элементов d12(i), d22(i) матрицы (5), по которым в соответствии с выражением:

формируют последовательность текущих значений азимута АИО). При этом используется приближенный метод пошагового расчета (коррекции) матрицы D [7], в соответствии с которым коррекция ее элементов на интервалах времени (шагах) Т=ti-ti-1, в течение которых угловые скорости ωХ, ωY, ωZ могут считаться постоянными, проводится по алгоритму:

Учитывая, что в выражении (6) используются только два элемента d12,d22, алгоритм (7) сводится к рекуррентной процедуре:
d23(i)=d21(i-1)δy(i-1)-d22(i-1)δx(i-1)+d23 (i-1).
Здесь δX=ωXT, δY=ωYT, δZ=ωZT - парциальные (пошаговые) приращения углов, i - номер очередного интервала (шага).
Как отмечено выше, начальное значение матрицы D(0) рассчитывается по нулевым углам тангажа β и крена γ и начальному значению истинного азимута АИ(0), формируемому аппаратурой потребителя ГНС с двумя разнесенными антеннами. В соответствии с (5) начальное значение имеет вид;

Объем K калибровочной последовательности АМ(i), АИ(i), i=0, l, …, формируемой по завершении полного (на 360 град) оборота платформы, определяется скоростью ее вращения ωгор в горизонтальной плоскости (угловой скоростью ωZ при строгом горизонтировании) и шагом Т выдачи
данных измерительными датчиками (задается одинаковым для МК, акселерометра и ДУС).
Так, при скорости вращения ωгор, равной 20 град/сек (время полного оборота Тоб=18 сек), и шаге Т=0,005 сек (частота выдачи данных F=200 Гц), К=3600 парных значений АМ(i), AH(i). При этом парциальное угловое приращение δZ=ωгорT=0,1 град. Заметим, что затрачиваемое время (18 сек) отвечает требованиям оперативности калибровки МК большинства практических задач.
Для интерполяции калибровочной последовательности при практическом применении МК могут использоваться степенные полиномы, тригонометрические функции, сплайны различного порядка и др. Проведенное моделирование (см. далее) показало, что при типовых значениях шага δZ=0,05-0,2 град по азимуту, используемого при формировании дискретных калибровочных пар АМ(i), АИ(i), требуемая высокая точность обеспечивается линейной интерполяцией в соответствии с вычислительной процедурой:

Эта процедура, а также приведенные выше соотношения (3), (4), (6), (8), (9) достаточно просты и легко реализуются на современных вычислительных средствах.
Заявляемый способ иллюстрируется следующими графическими материалами:
Фиг. 1 Алгоритм работы заявляемого способа полевой калибровки магнитного компаса.
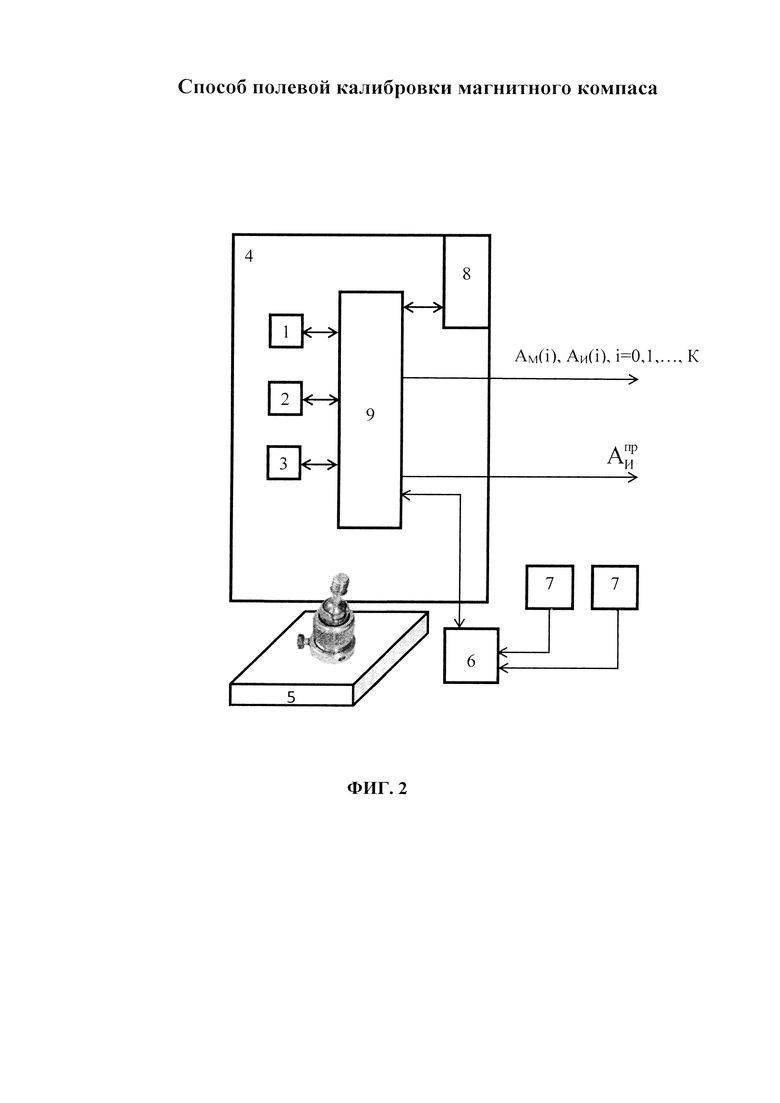
Фиг. 2 Структурная схема устройства полевой калибровки, где:
1. Трехосевой магнитный компас.
2. Трехосевой акселерометр.
3. Трехосевой датчик угловой скорости.
4. Платформа с поворотным механизмом.
5. Неподвижное основание.
6. Аппаратура потребителя (АЛ) ГНС.
7. Выносные антенны АП ГНС.
8. Органы индикации и управления платформой.
9. Контроллер.
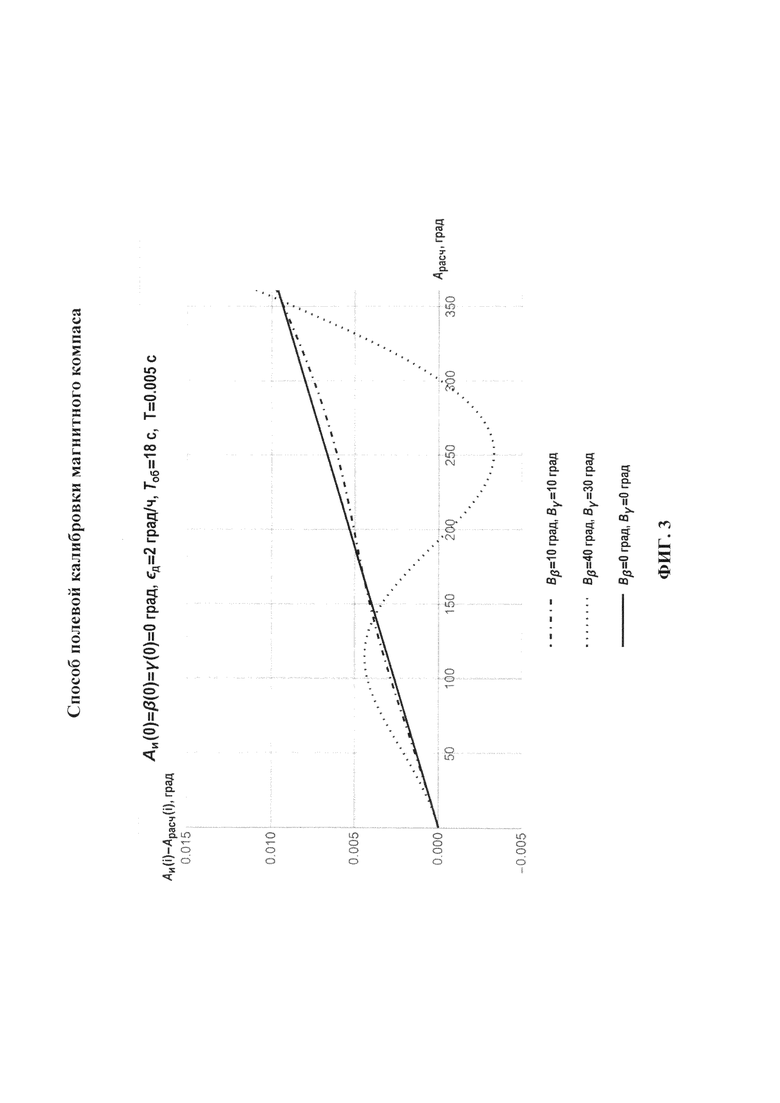
Фиг. 3 Графики ошибки определения истинного азимута АИ(i)-АРАСЧ(i) при линейном нарастании углов тангажа β и крена γ.
Фиг. 4 Графики ошибки АИ(i)-АРАСЧ(i) при колебательном изменении углов β и γ.
Применение заявляемого способа заключается в реализации алгоритма, изображенного на Фиг. 1. Рассмотрим его реализацию по алгоритму (Фиг. 1).
При вращении поворотной платформы в дискретные моменты времени ti с шагом T=l/F, задаваемым частотой F выдачи данных измерительными датчиками, магнитным компасом измеряют проекции HX(i), HY(i), HZ(i) вектора МПЗ, акселерометром - проекции aX(i), aY(i), aZ(i) вектора ускорения силы тяжести g, ДУС - проекции ωX(i), ωY(i), ωZ(i) вектора угловой скорости платформы.
В начальный момент t0 (i=0) углы тангажа Р(0) и крена у(0), вычисляемые по формуле (4), горизонтированием платформы оператором задают равными нулю (проекции aX(0)=aY(i)=0), а начальное значение азимута АИ(0) однократно определяют аппаратурой потребителя ГНС с двумя разнесенными антеннами. По этим значениям в соответствии с соотношением (9) однократно вычисляют начальное значение матрицы направляющих косинусов D(0), по элементам d12(0), d22(0) которой (в момент t0 коррекция отсутствует) по формуле (6) рассчитывают азимут АИ(0), который совпадает со значением, определенным аппаратурой потребителя. Одновременно по измеренным проекциям HX(0), HY(0), HZ(0) и углам β(0)=γ(0)=0 в соответствии с выражением (3) вычисляют начальное значение азимута АМ(0). Проекции ωX(0), ωY(0), ωZ(0) на этом этапе не используются.
В последующие моменты времени ti (i=l, 2, …) по текущим значениям проекций ωX(i), ωY(i), ωZ(i) (с задержкой на шаг Т) при начальном значении D(0) в соответствии с рекуррентной процедурой (8) производят пошаговую коррекцию элементов d11(i), d12(i), …, d23(i) матрицы D(i), по элементам d12(i), d22(i) которой в соответствии с выражением (6) вычисляют значения истинного азимута АИ (i). Одновременно по проекциям HX(i), HY(i), HZ(i) и углам P(i), y(i) (в общем случае ненулевым), рассчитываемым по формулам (4), в соответствии с соотношением (3) вычисляют значения магнитного азимута АМ(I). Отличие углов β(i), γ(i) от нуля вызвано неизбежными отклонениями платформы при ее круговом вращении от плоскости местного горизонта в реальных условиях работы оператора любой квалификации.
При достижении заданного числа шагов K (i=K) объединением рассчитанных азимутов АМ(i), AH(i) производят формирование калибровочной последовательности парных значений АМ(0, AH(i), i=l, 2, … K.
Как отмечалось, число К=Тоб/Т определяется шагом Т выдачи данных измерительными датчиками и временем полного оборота платформы Тоб, которое, в свою очередь, зависит от угловой скорости вращения ωгор: Тоб=360 град/ωгор. Как и в случае горизонтирования платформы, даже опытному оператору невозможно строго выдержать заданную скорость соГОрзад (например, 20 град/сек). Поэтому на практике число К следует назначать с запасом, т.е. больше заданного числа Kзад=360 град/((ωгорзадТ) в расчете на возможную реальную скорость ωгор <ωгорзад. Этим обеспечивается необходимый полный набор калибровочных пар АМ(i), АИ (i) на интервале от 0 до 360 град. Тем более таким правилом полный набор обеспечивается при ωгор>ωгорзад.
Рассмотрим возможность технической реализации заявляемого способа.
Структурная схема устройства, реализующего способ, приведена на Фиг. 2. Размещенные на поворотной платформе 4 измерительные датчики 1, 2, 3 подключают к встроенному в платформу контроллеру 9, выполняющему сбор и обработку данных. Также к контроллеру подключают аппаратуру потребителя 6 с двумя выносными антеннами 7. Аппаратуру потребителя произвольно размещают на местности вблизи основания 5 платформы на расстоянии, обеспечивающем информационное сопряжение с контроллером 9. Антенны 7 информационно и по питанию подключают к аппаратуре потребителя 6 и устанавливают на горизонтальном участке местности под произвольным углом относительно направления на север (приблизительно), разнося на расстояние, обеспечивающее заданную высокую точность определения начального азимута АИ(0) (на практике это 5-10 м). С помощью органов индикации и управления 8 проводят начальную выставку платформы, добиваясь нулевых углов тангажа и крена и совпадения ее продольной оси с прямой, соединяющей антенны 7. Начало и конец цикла измерений и обработки данных задаются управляющими сигналами контроллера 9, инициируемыми органами управления 8 при круговом вращении платформы оператором. В ходе цикла в памяти контроллера 9 проводят накопление текущих дискретных значений магнитного и истинного азимутов. По окончании цикла контроллером 9 производится формирование парной калибровочной последовательности АМ(i), АИ(i).
Возможны два варианта последующего применения результатов калибровки.
В первом варианте магнитный компас 1 изымают из состава поворотной платформы 4 и устанавливают на другом неподвижном или подвижном объекте (транспортное средство, прибор разведки, пешеход и др.), выполняющем задачи в окрестности местности проведения калибровки. Калибровочная последовательность для этого перезаписывается контроллером 9 в собственный микроконтроллер МК.
Во втором варианте МК остается в составе платформы 4 и совместно с другими средствами устройства (Фиг. 2) выполняет задачи высокоточной углометрии при топопривязке, определении дирекционных направлений артиллерийских позиций, формировании целеуказаний и т.п.При этом контроллер 9 реализует завершающий этап калибровки - определение по фиксируемому магнитному азимуту  с использованием процедуры интерполяции (10) истинного направления
с использованием процедуры интерполяции (10) истинного направления  на заданный объект (ориентир, цель).
на заданный объект (ориентир, цель).
Для подтверждения высокой точности заявляемого способа использовалась математическая модель, реализующая приведенные аналитические соотношения. Поскольку основным при калибровке МК является фактор точности определения истинного азимута АИ, моделировалась последовательность вычислительных процедур правой ветви алгоритма (Фиг. 1). Анализировалась интегральная ошибка определения, объединяющая наиболее значимые составляющие:
- методическую ошибку рекуррентной процедуры (8), обусловленную используемым приближенным методом дискретного решения непрерывного матричного дифференциального уравнения Пуассона [7];
- вычислительную ошибку из-за конечного (не сколь угодно малого) парциального углового приращения δZ по азимуту (влияние δХ, δY существенно меньше), ограниченного по величине частотой F выдачи данных измерительными датчиками (шагом Т) и заданной скоростью ωгор вращения платформы оператором;
- инструментальную ошибку ДУС, определяемую дрейфом εД его измерительных осей;
- остаточную ошибку от нарушения горизонтирования при вращении платформы, проявляющегося в ненулевых изменяющихся углах тангажа и крена.
Флуктуационная ошибка ДУС и разовая ошибка определения начального азимута АИ(0) АП ГНС менее значимы и далее не рассматриваются.
В качестве контрольных приняты цифры, соответствующие требованиям по точности целеуказания и наведения артиллерийских и других высокоточных средств поражения, а именно 1-2 д.у. (деления угла), т.е. 0,06-0,12 град.
Моделирование проводилось для широкого набора исходных данных. Установлено, что при типовых, приемлемых для широкой практики значениях ωгор=10 - 20 град/сек (Тоб=18-36 сек) и F=100-200 Гц (Т=0,005-0,01 сек), что соответствует δZ=0,05-0,2 град, методическая и вычислительная ошибки достаточно малы (тысячные доли градуса).
Основной вклад вносят дрейф ДУС (по каждой из осей) и остаточная ошибка горизонтирования платформы.
На Фиг. 3 в качестве примера приведены графики ошибки АИ(i)-АРАСЧ(i) для типовых значений εД, Тоб и Т. Здесь АРАСЧ(i) - расчетный (идеальный) истинный азимут в отсутствии каких-либо ошибок. Ошибка горизонтирования представлена линейно нарастающими (до Вβ=Вγ=10 град и Вβ=40 град, Вγ=30 град) при вращении платформы углами тангажа и крена. Сплошной график соответствует точному горизонтированию (Bβ=Bγ=0 град) и свидетельствует о значительном вкладе дрейфа εД. Без потери общности азимут АИ(0) принят равным нулю. При других значениях АИ(0) графики остаются прежними, сдвигаясь вдоль оси абсцисс. Из графиков видно, что результаты в контрольные цифры укладываются с запасом.
На Фиг.4 представлены результаты при более сложном колебательном (синусоидальном)характере изменения углов β, γ. Амплитуды колебаний Вβ=Ву=10 град, a Mβ=Mγ=1 и 5 означают, что во время Тоб=18 сек полного оборота платформы укладываются один и пять периодов колебаний углов соответственно. Видно, что здесь ошибка АИ(i)-АРАСЧ(i) заметно больше, но также укладывается в контрольные цифры.
Таким образом, заявляемый способ полевой калибровки магнитного компаса может быть реализован и обеспечивает повышение точности, простоту реализации и расширение области применения ее результатов.
Источники информации
1. Патент US 6877237
2. Патент US 6543146
3. Патент WO 2013188776
4. Патент RU 2497139
5. Патент RU 2623192
6. Патент RU 2503923
7. Кузовков Н. Т., Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982, 216 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА ПЕШЕХОДА | 2012 |
|
RU2503923C1 |
| СПОСОБ КАЛИБРОВКИ ТРЁХОСЕВОГО ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2022 |
|
RU2788825C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ВЕТРА С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2744772C1 |
| Комплект носимой аппаратуры топогеодезической привязки и формирования целеуказаний | 2017 |
|
RU2661676C1 |
| Способ оценки пространственного и углового положения объекта | 2024 |
|
RU2831368C1 |
| СПОСОБ КАЛИБРОВКИ ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2014 |
|
RU2572109C1 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |


Изобретение относится к способам калибровки магнитного компаса в полевых условиях, учитывающим инструментальные погрешности и ошибки из-за аномалий магнитного поля Земли в конкретной местности. Способ предполагает размещение на поворотной платформе трехосевых магнитного компаса, акселерометра и датчика угловой скорости, по измерениям которых при круговом вращении формируют калибровочную последовательность парных значений магнитного и истинного азимутов. Начальные условия для калибровки формируют однократным применением аппаратуры потребителя глобальных навигационных систем с двумя разнесенными антеннами в угломерном режиме. Используемый алгоритм выполняет высокоточное аналитическое (виртуальное) горизонтирование показаний измерительных датчиков, чем обеспечивается прецизионное вычисление значений истинного азимута, являющегося для компаса калибровочным эталоном. При практическом применении компаса направление на объект (цель) определяют по фиксируемому магнитному азимуту выбором соответствующего истинного азимута из калибровочной последовательности. Технический результат – повышение точности, простота реализации и расширение области применения результатов калибровки магнитного компаса. 4 ил.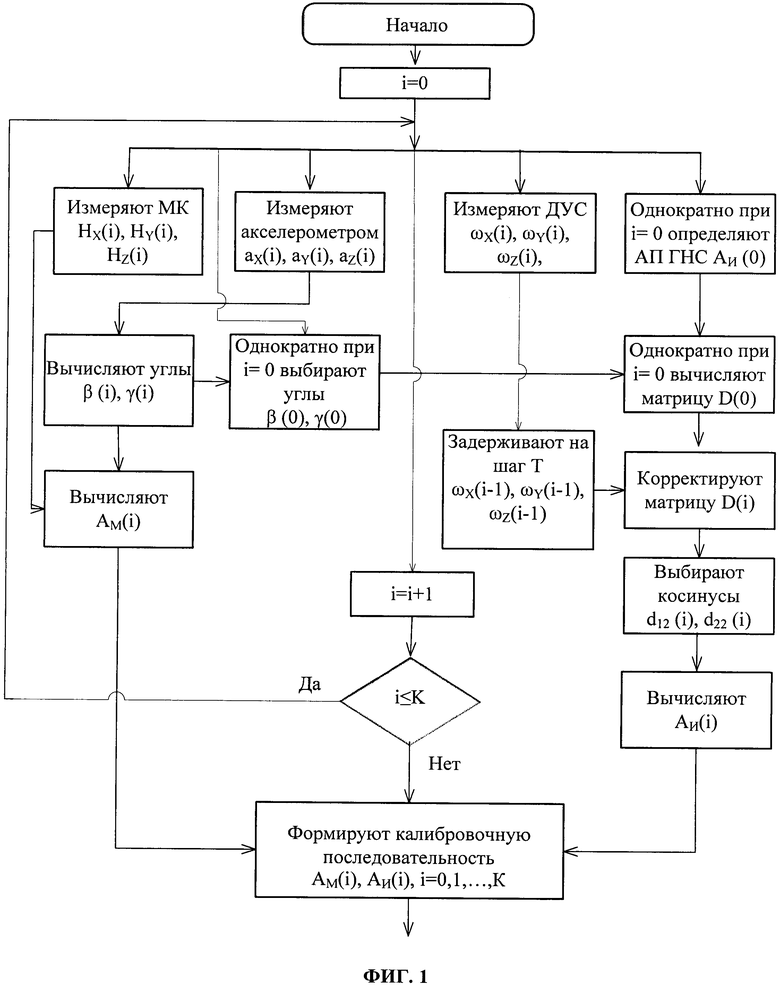
Способ полевой калибровки трехосевого магнитного компаса с использованием аппаратуры потребителя глобальных навигационных систем, заключающийся в определении и сравнении магнитного АМ и истинного АИ азимутов, отличающийся тем, что совместно с магнитным компасом используют соосные с ним трехосевые акселерометр и датчик угловой скорости, которые размещают на поворотной платформе с неподвижным основанием в области местности практического применения магнитного компаса пользователем, при размещении обеспечивают параллельность их осей связанным осям платформы, аппаратуру потребителя с двумя выносными антеннами устанавливают вблизи основания платформы, антенны разносят в горизонтальной плоскости на расстояние, обеспечивающее заданную точность определения аппаратурой потребителя начального азимута АИ(0), начальную установку платформы выполняют ее горизонтированием путем сведения к нулю рассчитываемых по данным акселерометра углов тангажа и крена платформы и совмещением по направлению одной из ее горизонтальных связанных осей с прямой, соединяющей антенны, одновременно магнитным компасом определяют начальный азимут АМ(0), вращают платформу, при этом по данным магнитного компаса и углам тангажа и крена, рассчитываемым по данным акселерометра, определяют текущие дискретные значения азимута АМ (i), по данным датчика угловой скорости рассчитывают матрицу направляющих косинусов направлений на географические восток и север и местной вертикали относительно связанных осей платформы, по элементам которой определяют текущие дискретные значения азимута АИ(i), при этом начальное значение матрицы рассчитывают по нулевым углам тангажа и крена и начальному значению азимута АИ(0), по завершении полного оборота платформы формируют дискретную калибровочную последовательность парных значений АМ(i), АИ(i), i=0, l, …, которую при практическом применении магнитного компаса используют путем ее интерполяции для определения и выдачи пользователю азимута  по зафиксированному азимуту
по зафиксированному азимуту  .
.
| Способ калибровки электронного магнитного компаса | 2016 |
|
RU2623192C1 |
| СПОСОБ ПРОВЕДЕНИЯ МАГНИТНОЙ ТЕРАПИИ ЗЛОКАЧЕСТВЕННЫХ ОБРАЗОВАНИЙ | 2005 |
|
RU2295933C2 |
| СПОСОБ КАЛИБРОВКИ ЭЛЕКТРОННОГО МАГНИТНОГО КОМПАСА | 2014 |
|
RU2572109C1 |
| СПОСОБ КАЛИБРОВКИ МАГНИТНОГО КОМПАСА ПЕШЕХОДА | 2012 |
|
RU2503923C1 |
| WO 1998048292 A2, 29.10.1998. | |||

