Изобретение относится к области электротехники, в частности к преобразовательной технике, и может быть использовано для управления импульсными стабилизаторами напряжения (ИСН) в автономных системах электропитания (СЭП) с первичными источниками (ПИ) энергии ограниченной мощности, обладающими свойствами источника тока и допускающими работу в режиме короткого замыкания, например полупроводниковыми фотопреобразователями.
Известен [1] способ управления ИСН шунтового типа (ИСН ШТ) в автономной СЭП, состоящей из соединенных последовательно ПИ ограниченной мощности, допускающего работу в режиме короткого замыкания и ИСН ШТ, силовая цепь которого содержит конденсатор, управляемый электрический ключ (УЭК) и диод, причем диод включен между входом и выходом ИСП ШТ, управляемый электрический ключ включен между входом и общим проводом ИСН ШТ, а конденсатор подключен между выходом и общим проводом ИСН ШТ, являющимся одновременно и общим проводом ПИ. Способ заключается в измерении напряжения на выходе стабилизатора, формировании сигнала рассогласования по напряжению путем вычитания опорного напряжения из напряжения па выходе стабилизатора, усилении сигнала рассогласования по напряжению и формировании усиленным сигналом рассогласования по напряжению импульсов управления УЭК по принципу широтно-импульсной модуляции.
Этот способ позволяет обеспечить стабилизацию напряжения на выходе стабилизатора с силовой цепью ИСН ШТ при использовании ПИ, обладающего свойствами источника тока. К недостаткам этого способа следует отнести то, что он не обеспечивает астатизма выходного напряжения, поскольку отсутствует интегрирование сигнала рассогласования по напряжению.
Наиболее близким к заявленному является способ управления [2] импульсным стабилизатором напряжения, выполненным в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключенным к первичному источнику, обладающему свойствами источника тока, при котором измеряют напряжение UВЫХ на выходе стабилизатора и ток IC конденсатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент KP, интегрируют второй сигнал, при этом ограничивая, путем прерывания интегрирования, диапазон изменения интеграла но значениям его максимальных отклонений в динамических режимах, не приводящих к прерыванию модуляции, получают третий сигнал, умножая значение тока IС конденсатора на коэффициент KI, формируют результирующий сигнал, суммируя пятый сигнал и интеграл второго сигнала, сигналом управления формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой модулятора в момент формирования модулируемого фронта импульса, получают пятый сигнал, интегрируя четвертый сигнал, вычисляемый путем вычитания из третьего сигнала самого пятого сигнала, взятого с коэффициентом  , где Т - период преобразования, второй сигнал принимают равным первому, причем в случае модуляции переднего фронта импульсов управления УЭК сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления УЭК сигнал управления принимают равным результирующему сигналу, при этом
, где Т - период преобразования, второй сигнал принимают равным первому, причем в случае модуляции переднего фронта импульсов управления УЭК сигнал управления получают, инвертируя результирующий сигнал, а в случае модуляции заднего фронта импульсов управления УЭК сигнал управления принимают равным результирующему сигналу, при этом  , где UЛ(T) - амплитудное значение нелинейного опорного напряжения модулятора, IПИ - величина тока первичного источника,
, где UЛ(T) - амплитудное значение нелинейного опорного напряжения модулятора, IПИ - величина тока первичного источника,  , где RС - внутреннее активное сопротивление конденсатора, а нелинейное опорное напряжение модулятора
, где RС - внутреннее активное сопротивление конденсатора, а нелинейное опорное напряжение модулятора  , где mТ<tK≤(m+1)Т.
, где mТ<tK≤(m+1)Т.
Этот способ позволяет обеспечить в ИСН малую длительность переходных процессов в динамических режимах работы и малую величину статической ошибки стабилизации выходного напряжения. Однако при его использовании для управления ИСН требуется измерение тока конденсатора выходного фильтра, что предполагает включение датчика тока последовательно с конденсатором выходного фильтра. Датчик тока обладает внутренним сопротивлением. Переменный ток, проходящий через конденсатор, приводит к появлению пульсации напряжения на датчике тока, а это увеличивает амплитуду пульсаций выходного напряжения, что нежелательно. Кроме того, при реализации устройства управления на основе микроконтроллерной техники потребуется многократная реализация процедур оцифровывания текущих значений выходного напряжения и тока и вычислительных процедур в течение периода Т преобразования. Поскольку в ИСН период преобразования составляет от единиц до десятков микросекунд, то оговоренные выше процедуры оцифровывания и вычисления или не возможны в силу малого времени на проведение процедуры, или потребуют значительных аппаратных затрат.
В основу изобретения положена задача повышения качества напряжения на выходе ИСН с силовой цепью повышающего типа (ИСН ПВ) при питании его от ПИ, обладающего свойствами источника тока, например при использовании участка вольтамперной характеристики (ВAХ) солнечной батареи от точки короткого замыкания до точки, в которой ее мощность максимальна. При этом под повышением качества выходного напряжения понимают снижение амплитуды пульсации выходного напряжения при одновременном обеспечении малой длительности переходного процесса и отсутствия статической ошибки стабилизации выходного напряжения.
Поставленная задача решается тем, что в способе управления импульсным стабилизатором напряжения, работающим с фиксированным периодом преобразования Т и выполненным в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключенным к первичному источнику, обладающему свойствами источника тока и силой тока IПИ, заключающемся в том, что измеряют напряжение UВЫХ на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение U0 из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент усиления KP, интегрируют первый сигнал, формируют результирующий сигнал, суммируя третий и четвертый сигналы, результирующим сигналом формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой широтно-импульсного модулятора в момент формирования модулируемого фронта импульса, согласно изобретению дополнительно из выходного напряжения UBЫХ выделяют динамическую составляющую UВЫХ.Д посредством частотной коррекции выходного напряжения UBЫX реальным дифференцирующим звеном с передаточной функцией W(p), второй и четвертый сигналы получают, запоминая в моменты времени (mT+τ) значения динамической составляющей UВЫХ.Д выходного сигнала и значения интеграла первого сигнала соответственно, третий сигнал получают, умножая второй сигнал на коэффициент усиления KОПТ, при этом при положительных значениях результирующего сигнала в моменты времени mТ производят включение управляемого силового ключа, а в моменты равенства результирующего сигнала и линейно нарастающего периодического сигнала широтно-импульсного модулятора производят выключение управляемого силового ключа, причем линейно нарастающий периодический сигнал равен нулю в момент времени (mT+τ) и увеличивается линейно до значения UA в момент времени (m+1)Т,
где Т - период преобразования (с),
τ - интервал времени, много меньший периода преобразования Т(с),
m - 1, 2, 3, …,
W(p)=T1p/(T1p+1) - передаточная функция,
где Т1 - постоянная времени (с), причем T1>>Т,
р - оператор Лапласа,
KР<<4KОПТ/(2rcC+Т) - коэффициент усиления сигнала рассогласования по напряжению,
где KОПТ=UAС/(ТIПИ) - коэффициент усиления второго сигнала,
rс - внутреннее активное сопротивление конденсатора (Ом),
С - емкость конденсатора (Ф),
UA - амплитудное значение линейно нарастающего периодического сигнала широтно-импульсного модулятора (В),
IПИ - сила тока первичного источника (А).
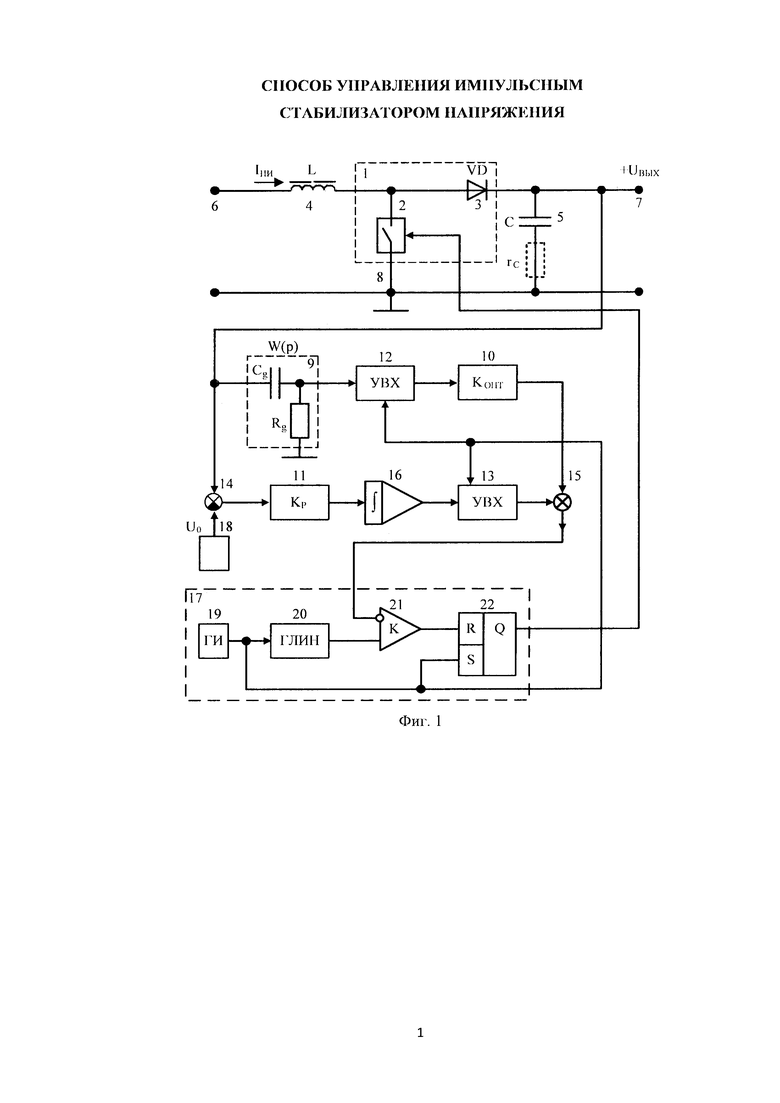
На фиг. 1 приведена функциональная схема ИСН, реализующего заявляемый способ. На фиг. 2 приведены временные диаграммы процессов в имитационной модели ИСН, выполненной в соответствии с функциональной схемой, приведенной на фиг. 1.
В состав ИСН (фиг. 1) входит силовая цепь и устройство управления (УУ). Силовая цепь ИСН содержит регулирующий элемент (РЭ) 1, состоящий из УЭК 2 и диода 3, дроссель 4, конденсатор 5, вход 6, выход 7, общий провод 8. При этом дроссель 4 с индуктивностью L и диод 3 включены последовательно между входом 6 и выходом 7 стабилизатора, УЭК 2 включен между общим проводом 8 стабилизатора и точкой соединения дросселя 4 с диодом 3, а конденсатор 5 с емкостью C включен между выходом 7 и общим проводом 8 стабилизатора.
Устройство управления содержит дифференцирующую цепь 9, два усилителя 10 и 11 с коэффициентами усиления KОПТ и Kp соответственно, два устройства выборки и хранения 12 и 13, два сумматора 14 и 15, интегратор 16, широтно-импульсный модулятор 17 и источник эталонного напряжения 18. В состав широтно-импульсного модулятора 17 входит генератор импульсов (ГИ) малой длительности 19, генератор линейно изменяющегося напряжения (ГЛИН) 20, компаратор 21 и RS-триггер 22. При этом дифференцирующая цепь 9 своим входом соединена с выходом 7 стабилизатора, а выходом - с информационным входом УВХ 12. Выход УВХ 12 подключен ко входу усилителя 10. Сумматор 14 первым входом подключен к выходу 7 стабилизатора, вторым инвертирующим входом - к источнику эталонного напряжения 18, а выходом - к усилителю 11. Интегратор 16 входом подключен к выходу усилителя 11, а выходом - к информационному входу УВХ 13. Сумматор 15 соединен первым входом с выходом усилителя 10, вторым входом - с выходом УВХ 13, а выходом со входом широтно-импульсного модулятора 17. ГИ 19 своим выходом подключен ко входу ГЛИН 20, S-входу RS-триггера 22 и управляющим входам УВХ 12 и УВХ 13. Компаратор 21 неинвертирующим входом подключен к выходу ГЛИН 20, выходом - к R-входу RS-триггера 22. Инвертирующий вход компаратора 21 является входом широтно-импульсного модулятора 17. Выход RS-триггера 22 является выходом широтно-импульсного модулятора 17 и подключен к управляющему входу УЭК 2.
Способ осуществляют следующим образом. Входной сигнал широтно-импульсного модулятора (ШИМ) является суммой двух сигналов, один из которых пропорционален динамической составляющей выходного напряжения ИСН, а второй - пропорционален интегралу сигнала рассогласования по выходному напряжению. Причем используются не текущие значения сигналов, а выбираемые и запоминаемые в начале каждого из периодов преобразования. Таким образом реализуется пропорционально-интегральный закон управления.
Определим оптимальную величину коэффициента усиления динамической составляющей выходного напряжения ИСН. Для этого воспользуемся подходом [3], основанным на представлении ИСН с ШИМ в режиме «малого сигнала» адекватной амплитудно-импульсной моделью, определении структуры и параметров устройства обратной связи с применением третьего полиномиального уравнения [4] синтеза систем с амплитудно-импульсной модуляцией и обратном адекватном переходе от системы с амплитудно-импульсной модуляцией к системе с широтно-импульсной модуляцией.
Описанный подход использован и в известном техническом решении, выбранном в качестве прототипа. При этом в [2] показано, что для достижения малой длительности переходного процесса в ИСН с ШИМ сигнал отклонения выходного напряжения ИСН от опорного стабильного значения должен быть подвергнут усилению в КОПТ раз, где

С - емкость конденсатора выходного фильтра (Ф),
КШИМ - коэффициент передачи широтно-импульсного модуля тора (с/В),
IПИ - ток первичного источника (А), поданный на вход широтно-импульсного модулятора.
Коэффициент передачи ШИМ определяется выражением [3]:

U'Л - скорость изменения линейно изменяющегося опорного напряжения ШИМ (В/с),
UА - амплитуда линейно изменяющегося опорного напряжения ШИМ (В). Подставив (2) в (1) и выполнив преобразования, получим:
В [2] при определении величины коэффициента КОПТ было сделано допущение о нулевой величине внутреннего активного сопротивления rс конденсатора выходного фильтра. При практической реализации ИСН конденсатор выходного фильтра обладает некоторым внутренним активным сопротивлением rс (Ом). Ток, проходящий через конденсатор, приводит к появлению падения напряжения на внутреннем активном сопротивлении rc, что приводит к отличию выходного напряжения ИСН от напряжения на емкости конденсатора выходного фильтра, т.е. на идеальном конденсаторе. Это отличие напряжений и, соответственно, появление этого отличия в сигнале рассогласования по напряжению приводит к нежелательному увеличению длительности переходного процесса. В известном способе [2] на вход широтно-импульсного модулятора поступает не сигнал рассогласования по напряжению, усиленный в КОПТ, а динамическая составляющая напряжения на емкости конденсатора, получаемая путем интегрирования тока конденсатора, взятого с коэффициентом передачи 1/С. Поэтому в динамической составляющей напряжения на емкости конденсатора отсутствует сигнал, равный падению напряжения на внутреннем активном сопротивлении rс. Однако необходимость измерения тока конденсатора предполагает применение датчика тока, включенного последовательно с конденсатором выходного фильтра. Использование в прототипе датчика тока, обладающего сопротивлением и включенного последовательно с конденсатором выходного фильтра, приводит к росту пульсации выходного напряжения, что нежелательно.
В предлагаемом способе управления ИСН информация о токе конденсатора не используется. Исключение влияния на процессы управления стабилизатором падения напряжения на внутреннем активном сопротивлении rс конденсатора решается иначе, а именно путем выделения из выходного напряжения его динамической составляющей посредством реального дифференцирующего звена с передаточной функцией W(p) и запоминанием значения динамической составляющей в начале каждого периода преобразования. При этом в значениях динамической составляющей выходного напряжения ИСН, выбранных и запомненных в начале каждого периода преобразования, присутствует составляющая сигнала, равная падению напряжения на внутреннем активном сопротивлении rс конденсатора. Но эта составляющая приводит только к смещению запомненных значений динамической составляющей выходного напряжения ИСН на величину падения напряжения на активном сопротивлении rс. В процессе работы стабилизатора это смещение компенсируется соответствующим изменением сигнала на выходе интегратора сигнала рассогласования по напряжению, т.е. за счет действия интегрирующего контура обратной связи.
Выбор коэффициента усиления КР по интегральной составляющей сигнала рассогласования в прототипе [2] производится из условия:

rс - внутреннее активное сопротивление конденсатора,
Т - период преобразования,
KI - коэффициент усиления пропорциональной составляющей сигнала рассогласования в прототипе, причем

a UA - амплитуда опорного напряжения ШИМ. Это позволяет обеспечить апериодический характер процесса устранения статической ошибки стабилизации выходного напряжения и большие запасы по амплитуде и фазе у ИСН как системы автоматического регулирования.
В заявляемом способе предлагается, как и в известном, ограничить величину коэффициента

Однако коэффициент KI, входящий в выражение (6), - это коэффициент усиления пропорциональной составляющей входного сигнала ШИМ в прототипе. В предлагаемом способе пропорциональная составляющая входного сигнала ШИМ, согласно (3), усиливается в КОПТ раз. Произведем замену в (6) коэффициента KI, определяемого выражением (5), на коэффициент КОПТ, определяемый выражением (3), с учетом их разницы. Приравняем коэффициенты, используя добавочный коэффициент КДОБ.

Определим добавочный коэффициент КДОБ=КI/КОПТ и, после подстановки значений КI и КОПТ согласно (5) и (3), получим:

В выражении (6) заменим коэффициент KI па КОПТ с учетом (7) и (8). При этом получим:

Рассмотрим работу ИСН с устройством управления, в котором реализован предлагаемый способ. Дифференцирующая цепь 9 (см. фиг. 1) обеспечивает выделение динамической составляющей UВЫХ.Д из выходного напряжения Uвых. Сигнал рассогласования по напряжению формируется сумматором 14 путем вычитания из выходного напряжения UBЫХ эталонного напряжения UО. Далее сигнал рассогласования по напряжению усиливается в Кр раз посредством усилителя 11 и интегрируется интегратором 16. В начале каждого периода преобразования УВХ 12 и 13 запоминают, соответственно, значения динамической составляющей UВЫХ.Д выходного напряжения и выходного сигнала интегратора 16. Запоминание сигналов производится УВХ 12 и 13 в момент окончания импульса, поступающего на управляющие входы УВХ 12 и 13 от ГИ 19. Последний генерирует импульсы с периодом Т и длительностью τ, много меньшей Т. Выходной сигнал УВХ 12 усиливается в КОПТ раз усилителем 10 и поступает на первый вход сумматора 15. На второй вход сумматора 15 поступает сигнал с выхода УВХ 13. Сигнал с выхода сумматора 15 поступает на вход ШИМ 17, который формирует импульсы управления УЭК 2. Причем передний фронт импульса управления УЭК 2 формируется на выходе RS-триггера 22 в начале периода преобразования за счет подачи импульса с выхода ГИ 19 на S-вход RS-триггера. Задний фронт импульса управления УЭК 2 формируется на выходе RS-триггера 22 в момент переключения компаратора 21, выходной сигнал которого поступает на R-вход RS-триггера. Компаратор 21 переключается в момент равенства сигнала на выходе сумматора 15 - входного сигнала ШИМ и линейно нарастающего напряжения, формируемого ГЛИН 20.
С целью подтверждения осуществимости предлагаемого способа управления и заявленного технического результата в среде OrCAD разработана имитационная модель ИСН в соответствии с функциональной схемой, приведенной на фиг. 1. Модель имеет следующие параметры: ток первичного источника IПИ 5 А, индуктивность дросселя 4 L 200 мкГн, емкость конденсатора 5 С=1000 мкФ, внутреннее активное сопротивление конденсатора 5 rс=0,01 Ом, период преобразования Т=25 мкс, амплитуда линейно изменяющегося опорного напряжения ШИМ UA=1 В. Параметры элементов устройства управления соответствуют формуле заявляемого изобретения. Коэффициент КОПТ=CUA/(IПИT)=8. А коэффициент КP, выбираемый из условия Kp<<4КОПТ/(2rcC+Т), определен по выражению КР=0,1KОПТ/(2rСC+Т)=17780.
Исследования переходных и установившихся процессов в модели ИСН подтвердили решение поставленной задачи. Hа верхней временной диаграмме (фиг. 2, а) показано напряжение на выходе ИСH, на средней временной диаграмме (фиг. 2, б) - ток нагрузки, а на нижней временной диаграмме (фиг. 2, в) - входные сигналы компаратора 21 (см. фиг. 1), а именно линейно нарастающее напряжение UГЛИН на выходе генератора линейно изменяющегося напряжения и сигнал U15 на выходе сумматора 15 - входной сигнал широтно-импульсного модулятора 17.
Из временных диаграмм (фиг. 2) следует, что длительность переходного процесса изменения выходного напряжения, вызванного ступенчатым изменением тока нагрузки от 1,65 А до 3,55 А и обратно, приводит к переходному процессу длительностью в 1-2 периода преобразования. После чего на интервале в 12-15 периодов преобразования посредством интегрирующего контура обратной связи по напряжению обеспечивается устранение статической ошибки, возникшей на интервале переходного процесса длительностью в 1-2 периода преобразования. Апериодический характер изменения выходного напряжения на интервале устранения статической ошибки косвенно свидетельствует о значительных запасах устойчивости по амплитуде и фазе у ИСН, как системы автоматического регулирования.
Таким образом предлагаемый способ обеспечивает малую длительность переходного процесса и отсутствие статической ошибки стабилизации выходного напряжения. При этом его реализация не требует использования датчика тока, включенного последовательно с конденсатором 5 выходного фильтра. Следовательно, из пульсации выходного напряжения исключается пульсация напряжения на внутреннем сопротивлении датчика тока, что снижает амплитуду пульсации выходного напряжения.
Дополнительное преимущество предлагаемого технического решения состоит в обеспечении возможности реализации управления ИСН посредством микроконтроллерной техники. При реализации устройства управления ИСН на основе микроконтроллерной техники УВХ 12 и 13 заменяются на аналого-цифровые преобразователи, а усилитель 10, сумматор 15 и ШИМ 17 могут быть реализованы за счет вычислительных операций в микроконтроллере.
Источники информации
1. А.с. №1616375 СССР, кл. G05F 1/613. Стабилизирующий источник напряжения постоянного тока / A.П. Макаров. - Опубл. 05.01.89.
2. Патент №2239225 РФ, кл. G05F 1/56, Н02М 3/137. Способ управления импульсным стабилизатором напряжения / И.В. Алатов, Ю.А. Вторушин, Ю.В. Краснобаев, Е.И. Крутских, Б.Н. Мамлин, Г.Д. Эвенов. - Опубл. 27.10.2003, Бюл. №30.
3. Иванчура В.И., Манаков А.В., Соустин Б.П. Синтез исследование быстродействующего ИПП с ШИМ // Техническая электродинамика. - 1987. - С. 43-51.
4. Цыпкин Я.З. Теория линейных импульсных систем. - М.: Физматгиз, 1963. - 968 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2011 |
|
RU2460114C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 2002 |
|
RU2238583C2 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2012 |
|
RU2509337C1 |
| Способ управления зарядным устройством с импульсным принципом действия | 2023 |
|
RU2813604C1 |
| Способ управления импульсным стабилизатором напряжения | 2021 |
|
RU2764783C1 |
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ | 1988 |
|
RU2025764C1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1348796A1 |
| Способ стабилизации выходного напряжения импульсного стабилизатора | 1985 |
|
SU1376069A1 |
| Импульсный стабилизатор напряжения | 1985 |
|
SU1372288A1 |

Изобретение относится к преобразовательной технике и может быть использовано для управления импульсными стабилизаторами постоянного напряжения повышающего типа с широтно-импульсной модуляцией, который подключен к источнику энергии ограниченной мощности, обладающему свойствами источника тока. В импульсном стабилизаторе обеспечиваются астатизм выходного напряжения и малая пульсация выходного напряжения в статическом режиме, малые амплитуда и длительность переходных процессов в динамических режимах работы. Кроме того, имеется возможность реализации устройства управления на основе микроконтроллерной техники. Для достижения этого результата измеряют напряжение на выходе стабилизатора, вычисляют сигнал рассогласования по напряжению и его интеграл. Посредством дифференцирующего звена выделяют динамическую составляющую выходного напряжения. В начале каждого периода преобразования производят запоминание значений интеграла сигнала рассогласования по напряжению и динамической составляющей выходного напряжения. Запомненные значения сигналов умножают на фиксированные коэффициенты, полученные результаты суммируют и результатом суммирования формируют импульсы управления силовым электронным ключом стабилизатора по принципу широтно-импульсной модуляции. 2 ил.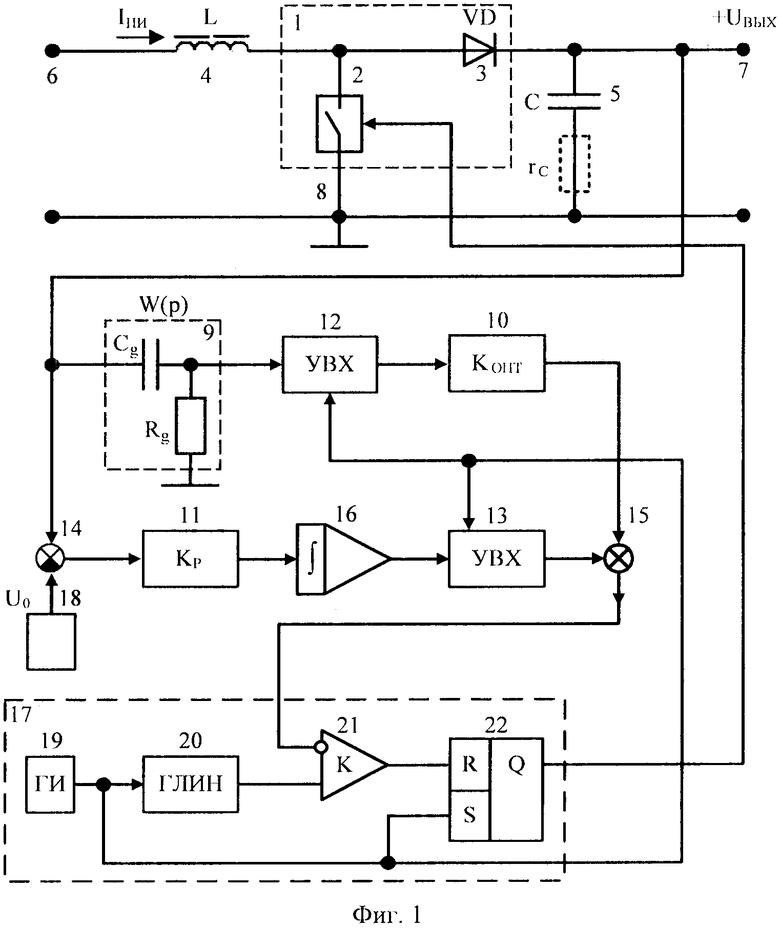
Способ управления импульсным стабилизатором напряжения, работающим с фиксированным периодом преобразования Т и выполненным в виде дросселя с индуктивностью L и диода, включенных последовательно между входом и выходом стабилизатора, управляемого электрического ключа, включенного между общим проводом стабилизатора и точкой соединения дросселя и диода, конденсатора с емкостью С, включенного между выходом и общим проводом стабилизатора, и подключенным к первичному источнику, обладающему свойствами источника тока и силой тока IПИ, заключающийся в том, что измеряют напряжение UВЫХ на выходе стабилизатора, формируют сигнал рассогласования по напряжению, вычитая эталонное напряжение U0 из напряжения на выходе стабилизатора, получают первый сигнал, умножая сигнал рассогласования по напряжению на коэффициент усиления KP, интегрируют первый сигнал, формируют результирующий сигнал, суммируя третий и четвертый сигналы, результирующим сигналом формируют импульсы управления управляемым электрическим ключом по принципу широтно-импульсной модуляции с блокировкой широтно-импульсного модулятора в момент формирования модулируемого фронта импульса, отличающийся тем, что из выходного напряжения UВЫХ выделяют динамическую составляющую UВЫХ.Д посредством частотной коррекции выходного напряжения UВЫХ реальным дифференцирующим звеном с передаточной функцией W(p), второй и четвертый сигналы получают, запоминая в моменты времени (mT+τ) значения динамической составляющей UВЫХ.Д выходного сигнала и значения интеграла первого сигнала соответственно, третий сигнал получают, умножая второй сигнал на коэффициент усиления KОПТ, при этом при положительных значениях результирующего сигнала в моменты времени mT производят включение управляемого силового ключа, а в моменты равенства результирующего сигнала и линейно нарастающего периодического сигнала широтно-импульсного модулятора производят выключение управляемого силового ключа, причем линейно нарастающий периодический сигнал равен нулю в момент времени (mT+τ) и увеличивается линейно до значения UA в момент времени (m+1)Т,
где T - период преобразования (с),
τ - интервал времени, много меньший периода преобразования Т(с),
m=1, 2, 3, …,
W(p)=T1p/(T1p+1) - передаточная функция,
где T1 - постоянная времени (с), причем T1>>Т,
p - оператор Лапласа,
KP<<4KОПТ/(2rcC+Т) - коэффициент усиления сигнала рассогласования по напряжению,
KОПТ=UAC/(TIПИ) - коэффициент усиления второго сигнала,
rc - внутреннее активное сопротивление конденсатора (Ом),
С - емкость конденсатора (Ф),
UA - амплитудное значение линейно нарастающего периодического сигнала широтно-импульсного модулятора (В),
IПИ - сила тока первичного источника (А).
| СПОСОБ УПРАВЛЕНИЯ ИМПУЛЬСНЫМ СТАБИЛИЗАТОРОМ НАПРЯЖЕНИЯ | 2003 |
|
RU2239225C2 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР С ОГРАНИЧЕНИЯМИ ВЫХОДНЫХ СИГНАЛОВ | 1999 |
|
RU2156992C1 |
| US2016062427A1,03.03.2016. | |||

