Изобретение относится к области космической межспутниковой связи и предназначено для обеспечения автономности функционирования космической спутниковой навигационной группировки ГЛОНАСС на срок до 30 суток, повышения точности эфемеридного и частотно-временного обеспечения системы, оперативной доставки специальной информации со всех космических аппаратов (КА), передачи командно-программной и приема телеметрической информации, оперативного контроля целостности космической системы, передачи данных на КА единой космической системы, снижение нагрузки на вычислительные средства наземного комплекса управления (НКУ) ГЛОНАСС.
Наиболее близким к заявленному техническому решению является аппаратура межспутниковых измерений (ВАМИ), опубликованная в издании «Глонасс, принципы построения и функционирования», 2005 год, авторы: Р.В. Бакитько и др., стр.448, 449, в котором аппаратура БАМИ состоит из блока формирования и обработки сигналов, усилителя мощности, входного устройства приемника. Недостатком аналога является невысокое быстродействие.
Решаемые заявленным изобретением задачи: формирование и передача широкополосных измерительных сигналов (ШИС) для приема их на всех КА ГЛОНАСС, находящихся в зоне радиовидимости излучающего аппарата, прием широкополосных измерительных сигналов от всех излучающих КА, находящихся в зоне радиовидимости принимающего аппарата, измерение временного сдвига принимаемых ШИС относительно местной шкалы времени и измерение псевдодальностей и псевдоскоростей, передача и прием измерительной и эфемиридно-временной информации, передача и прием специальных информационных сообщений (СИС) всем и от всех КА находящихся в зоне взаимной радиовидимости, передача и прием командно-программной информации также как и информации СИС, но на вторичной основе.
Технический результат заключается в увеличение объема и достоверности передаваемой и принимаемой информации.
Технический результат достигается тем, что бортовая аппаратура межспутниковых измерений ВАМИ состоит из радиопередающего устройства (РПДУ), в состав которого входят: усилитель мощности сигнала УМ, первый вход которого является входом РПДУ, выход которого является выходом РПДУ, источник вторичного электропитания (ИВЭП), первый выход которого соединен со вторым входом УМ, контактно распределительное устройство (КРУ), выход которого соединен с входом ИВЭП, на первый вход КРУ подается напряжение от внешних бортовых систем, также в состав ВАМИ входит приемопередающая антенна и циркулятор, вход которой соединен с выходом циркулятора, вход циркулятора соединен с выходом РПДУ, входной усилитель приемника (ВУП), в состав которого входят: устройство защиты, первый вход которого является входом ВУП, и соединен с выходом циркулятора, малошумящий усилитель, вход которого соединен с выходом устройства защиты, промежуточный усилитель, вход которого соединен с выходом малошумящего усилителя, полосовой фильтр (ППФ), вход которого соединен с выходом промежуточного усилителя, и оконечное устройство, вход которого соединен с выходом ППФ, а выход оконечного устройства является выходом ВУП, второй вход устройства защиты соединен с вторым выходом ИВЭП, также в состав ВАМИ входит радиоприемное устройство РПУ, в состав которого входят: конвертер и устройство цифровой обработки (УЦО), состоящее из аналого-цифрового преобразователя (АЦП), программированной логической интегральной схемы (ПЛИС) и процессора, первый вход конвертера является входом РПУ и соединен в выходом ВУП, первый выход конвертера соединен со входом АЦП, второй выход конвертера соединен с первым входом ПЛИС, выход АЦП соединен со вторым входом ПЛИС, вход/выход ПЛИС соединен с первым входом/ выходом процессора, второй вход/выход процессора соединен с входом/выходом конвертера, третий вход конвертера соединен с выходом ПЛИС, в состав БАМИ также входит модульный контроллер управления (МКУ) состоящий из контроллера управления, интерфейса манчестерского канала обмена (МКО), первый вход/выход которого соединен с первым входом/выходом контроллера управления, синхронизатора, второй вход/выход которого соединен с вторым входом/выходом контроллера управления, платы согласования и приема сигналов бортового синхронизирующего устройства (БСУ), первый вход/выход которой соединен с первым входом/выходом синхронизатора, выход платы согласования и приема сигналов БСУ соединен со вторым входом КРУ, второй вход/выход платы согласования и приема сигналов БСУ соединен с входом/выходом ИВЭП, четвертая шина интерфейса манчестерского канала обмена МКО является внешней шиной устройства БАМИ, также в состав БАМИ входит формирователь радиосигнала (ФРС), состоящий из платы формирования цифрового сигнала (ФЦС), платы формирования высокой частоты (ФВЧ), первый выход ФВЧ соединен со входом РПДУ, а второй и третий выходы ФВЧ соединены со вторым и третьим входами ФЦС соответственно, второй, третий и четвертый входы ФВЧ соединены со вторым, третьим и четвертым выходами ФЦС соответственно, платы распределения 5 МГц, общий выход которой соединен с первым входом ФВЧ и вторым входом конвертера, на вход платы распределения 5 МГц подается сигнал частотой 5 МГц, платы распределения 1 с, общий выход которой соединен с первым входом ФЦС, на вход платы распределения 1 с подается сигнал секундной метки, платы распределения 1 с и 5.2 МГц, вход которой соединен с первым выходом ФЦС, также в состав БАМИ входит блок логики и коммутации (БЛИК), причем ФЦС связан с контроллером управления посредством первой шины, соединенной между ФЦС и БЛИК, третьей шины, соединенной между синхронизатором и БЛИК и далее второго входа/выхода синхронизатора, процессор связан с контроллером управления посредством второй шины, соединенной между процессором и БЛИК, третьей шины, соединенной между синхронизатором и БЛИК и далее второго входа/выхода синхронизатора, выход платы распределения 1 с и 5.2 МГц соединен через БЛИК с третьим входом ПЛИС, общий выход платы разветвления 1 с соединен через БЛИК со входом приемника сигналов БСУ, выход синхронизатора соединен через БЛИК со вторым входом КРУ, третий выход ИВЭП соединен через БЛИК со входом синхронизатора, первый, второй, третий и четвертый выходы питания БЛИК соединены со входами питания МКУ, ВУП, РПУ и ФРС соответственно, вход БЛИК соединен с источником внешнего питания.
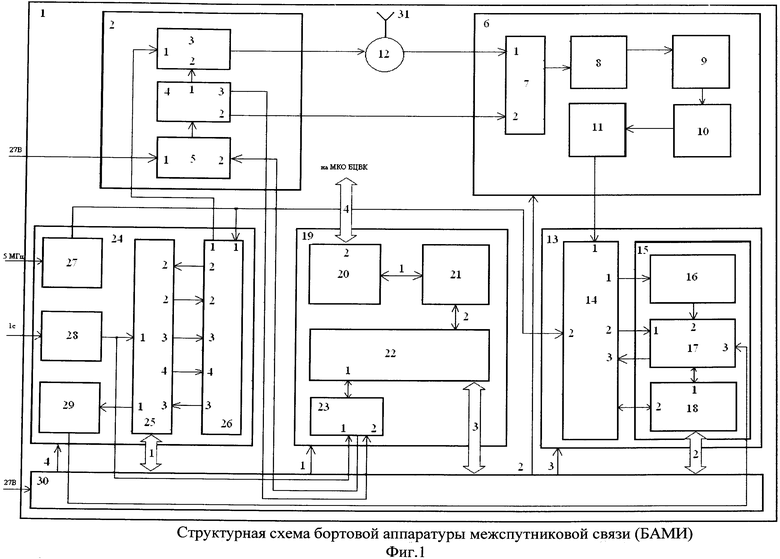
Суть заявляемого изобретения поясняется чертежом, где на фиг.1 схематически изображены:
1. Бортовая аппаратура межспутниковых измерений (БАМИ);
2. Радиопередающее устройство (РПДУ);
3. Усилитель мощности сигнала (УМ);
4. Источник вторичного электропитания (ИВЭП);
5. Контактно распределительное устройство (КРУ);
6. Входной усилитель приемника (ВУП);
7. Устройство защиты;
8. Малошумящий усилитель;
9. Промежуточный усилитель;
10. Полосовой фильтр (ППФ);
11. Оконечный усилитель;
12. Циркулятор;
13. Радиоприемное устройство (РПУ);
14. Конвертер;
15. Устройство цифровой обработки (УЦО);
16. Аналого-цифровой преобразователь (АЦП);
17. Программированная логическая интегральная схема (ПЛИС);
18. Процессор;
19. Модульный контроллер управления (МКУ);
20. Интерфейс манчестерского канала обмена (МКО)
21. Контроллер управления;
22. Синхронизатор;
23. Плата согласования и приема сигналов бортового синхронизирующего устройства (БСУ);
24. Формирователь радиосигнала (ФРС);
25. Плата формирования цифрового сигнала (ФЦС);
26. Плата формирования высокой частоты (ФВЧ);
27. Плата распределения 5 МГц;
28. Плата распределения 1 с;
29. Плата распределения 1 с и 5.2 МГц;
30. Блок логики и коммутации (БЛИК);
31. Приемно-передающая антенна.
Функциональное назначение и принцип работы приборов заявленного устройства БАМИ.
Модульный контроллер управления МКУ 19 состоит из контроллера управления МКО 21, интерфейса манчестерского канала обмена (МКО) 20, БСУ 23 и синхронизатора сигналов 22. На первый вход БСУ 23 транзитом через БЛИК 30 приходит внешний сигнал бортовой шкалы времени (БШВ) - оцифровка ОЦ - 32-х разрядный код времени, который выдается из бортового синхронизирующего устройства, входящего в состав КА в виде однополярного импульсного самотактирующегося кода единиц (К1) и нулей (К0) старшим разрядом вперед с частотой следования импульсов 100 Гц, на второй вход платы 23 - приходит импульсный сигнал 1 с.На ИВЭП 4 подаются потенциальные команды включения/выключения РПДУ с БСУ 23, на БСУ 23 телеметрия РПДУ 2, первый вход/выход БСУ 23 подключен к входу/выходу синхронизатора на который в соответствии с протоколом обмена SPI подается пакет времени и телеметрия от РПДУ 2, а в обратную сторону выдаются команды управления, второй вход/выход синхронизатора 2 соединен с входом/выходом контроллера управления, обмен цифровой информацией между блоками осуществляется по внутренней магистрали RS-232 в соответствии с «Протоколом обмена Контроллер МКО 21 ↔ Синхронизатор 22», третья шина подключена к БЛИК 30, в котором проложена магистраль обмена между блоками ФРС 24, РПУ 13 и МКУ 19, обмен цифровой информацией осуществляется согласно «Протокола информационно-логического взаимодействия по внутренней магистрали RS-485 БАМИ», первый вход/выход контроллера МКО 21 соединен с вторым входом/выходом интерфейсной платы МКО 20, первый вход/выход платы МКО подключается к магистрали МКО для обменов цифровой информацией с внешним бортовым цифровым вычислительным комплексом БЦВК КА согласно «Протоколу информационно-логического обмена по МКО между БАМИ 1 И БЦВК.
Модульный контроллер управления МКУ 19 выполняет следующие функции:
- обеспечивает обмен цифровой информацией между БАМИ и бортовым центральным вычислительным комплексом (БЦВК) КА по манчестерскому каналу обмена (МКО) в соответствии с "Протоколом логического и информационного взаимодействия БАМИ с БКУ.
- формирование аппаратных команд управления приборами комплекса БАМИ (РПУ 13, ФРС 24, ВУП 6, РПДУ 2) на основании программных команд, полученных от БЦВК по манчестерскому каналу обмена МКО;
- обеспечивает синхронную работу приборов РПУ и ФРС по штатной циклограмме (20-ти секундные циклы приема-передачи сигналов MPЛ), в соответствии с заданными режимами работы, с привязкой к принятым и декодированным синхросигналам бортовой шкалы времени (БИТВ) от БСУ КА;
- контролирует достоверность (монотонность) кодов БШВ БСУ и обеспечивает автономную генерацию кодов БИТВ при недостоверных кодах БШВ БСУ;
- осуществляет информационно-логический обмен по внутренней шине RS-485 в соответствии с "Протоколом информационно-логического взаимодействия по внутренней магистрали RS-485" между приборами ФРС 24, РПУ 13 и МКУ 19;
- обеспечивает прием от бортового цифрового вычислительного комплекса БЦВК, входящего в состав КА и трансляцию на ФРС информации кадра (для передачи по MP Л);
- производит накопление, хранение информации и передачу на БЦВК, принятой по MPЛ по 6-ти каналам РПУ за один 5-ти секундный сеанс приема;
- обеспечивает прием, обработку и передачу на БЦВК аппаратной телеметрии приборов;
- проводит отработку плановой коррекции БШВ Глонасс.
В обменах по внутренней магистрали RS-485 с ФРС 24 и РПУ 13 МКУ выполняет роль "ведущего".
Интерфейс МКО 20 выполнен на микросхеме NHI-15191 (RT), Контроллер управления 21 и синхронизатор 22 выполнены на микросхемах FUJITSU MB90F594A, БСУ 23 выполнен на микросхеме AT 90S2313.
Формирователь радиосигнала ФРС состоит из платы формирования цифрового сигнала ФЦС 25, платы формирования высокой частоты ФВЧ 26, первый выход которой соединен со входом РПДУ, второй и третий выходы соединены со вторым и третьим входами ФЦС соответственно, второй, третий и четвертый входы ФВЧ соединены со вторым, третьим и четвертым выходами ФЦС соответственно, платы разветвления 5 МГц, общий выход которой соединен с первым входом ФВЧ и вторым входом конвертера, на вход платы разветвления 5 МГц подается сигнал частотой 5 МГц, платы разветвления 1 с, общий выход которой соединен с первым входом ФЦС, на вход платы разветвления 1 с подается сигнал секундной метки, платы разветвления 1 с и 5.2 МГц, вход которой соединен с первым выходом ФЦС, также в состав БАМИ входит блок логики и коммутации (БЛИК), причем ФЦС связан с контроллером управления посредством первой шины через БЛИК и далее второго входа/выход синхронизатора, РПУ связан с контроллером управления посредством второй шины через БЛИК и далее второго входа/выход синхронизатора, выход платы разветвления 1 с и 5.2 МГц соединен через БЛИК со входом ПЛИС, общий выход платы разветвления 1 с соединен через БЛИК со входом приемника сигналов БСУ, выход синхронизатора соединен через БЛИК со вторым входом КРУ, третий выход ИВЭП соединен через БЛИК со входом синхронизатора.
ФРС 24 является устройством формирования радионавигационных сигналов и выполняет следующие функции:
- формирует частотно-временную структуру радиосигнала: псевдослучайных последовательностей (ПСП-В+ПСП-О), литерных значений несущей частоты, помехозащищающее кодирование информации радиосигнала в соответствии с документом «Структура информационно-измерительных радиосигналов, излучаемых в межспутниковой радиолинии»;
- осуществляет фазовую манипуляцию несущей частоты радиосигнала;
- распределяет внешние синхросигналы БСУ: "5МГц" и "1 с" по приборам МКУ 19, ФРС 24, РПУ 13 и БЛИК 30.
- обменивается цифровой информацией по внутренней магистрали RS-485 через БЛИК 30 с МКУ 19.
ФРС 24 состоит из плат ФВЧ 26 и ФЦС 25 и плат разветвления "5 МГц", "1 с" и "5,2 МГц" и "1 с" (27, 28, 29). Опорный сигнал "5 МГц" и "1" с поступают от бортового синхронизирующего устройства КА соответственно на платы разветвления "5 МГц" 17 27 и "1 с" 28, с которых данные сигналы поступают на платы ФВЧ 26 и ФЦС 25. Так же с платы "5 МГц" 27 сигнал поступает на РПУ 13, а с платы "1 с" 28 на приемник сигналов БСУ 23.
На плате ФВЧ 26 на выходе 1 с помощью синтезатора частоты, привязанного к опорной частоте 5 МГц, формируется ВЧ-сигнал несущей частоты, одной из семи литер. Так же на плате ФВЧ 26 осуществляется квадратурная фазовая манипуляция ВЧ-сигнала модулирующим сигналом сформированным на выходе 2 платы ФЦС 25. Модулирующий сигнал поступает на вход 2 платы ФВЧ в сопровождении тактовой частоты ПСП подаваемой на вход 3 ФВЧ. Коды загрузки синтезатора формируются на плате ФЦС и передаются на вход 4 платы ФВЧ.
На плате ФЦС 25 осуществляется:
- формирование частотно-временной структуры радиосигнала в соответствии с документом «Структура информационно-измерительных радиосигналов, излучаемых в межспутниковой радиолинии» и передача на плату ФВЧ 26 модулирующего сигнала по выходу 2;
- формирование калибровочного сигнала "5,2 МГц", синхронизированного с тактовой сеткой ПСП, и формирование «привязанной» к опорному сигналу «5МГц» метки времени «1 Гц» на выходе 1.
- прием цифровых пакетов по внутреннему интерфейсу RS-485 (первая шина) от МКУ 19:
1) установочной информации, включающей: номер литерной частоты, номер полинома ПСП, код ПСП и метки начала генерации сигнала;
2) информации кадра межспутниковой радиолинии;
3) телеметрии (ТМ) ФРС 24.
- формирование и загрузка кодов синтезатора по выходу 4 для формирования на плате ФВЧ несущей частоты, на основе полученных от МКУ 19 цифровой информации.
Плата "5МГц" 27 - распределяет опорный сигнал на плату ФРС 24 и МКУ 19. Плата "1 с" 28 - распределяет сигнал "1 с" на МКУ 19. Плата "5,2 МГц и 1 с" 29 распределяет сигналы "5,2 МГц " и "1 с" (привязанную к 5МГц) на РПУ 13.
Радиоприемное устройство РПУ 13 предназначено для:
- одновременного приема радиосигналов МРЛ БАМИ от шести КА;
- декодирования сигнала и выделения цифровой информации, передаваемой по МРЛ;
- вычисления псевдодальности и псевдоскорости на определенный момент времени от начала цикла приема по шкале времени (ШВ) аппарата принимающего сигнал;
- выдачи полученной информации в МКУ 19 по внутренней магистрали RS-485 для дальнейшей передачи данных в БЦВК КА;
РПУ 13 связан с контроллером управления посредством второй шины через БАМИ и далее второго входа/выход синхронизатора РПУ 13 работает следующим образом. Устройство начинает работу при подаче на него входных сигналов: высокочастотного сигнала ВЧ сигнала частотой F=(2212,5±6) МГц с выхода ВУП 6, опорного синусоидального сигнала частотой F=5 МГц и диапазоном от 200 до 500 мВ с выхода платы разветвления 5 МГц 27, секундной метки бортовой шкалы времени БШВ 1 с на ПЛИС 17 с выхода платы разветвления 1 с 28 через БАМИ 30, команд управления и цифровой информации, поступающих через порт RS-485 (вторая шина) от МКУ 19 через БЛИК 30.
В РПУ 13 формируются на выходе второй шины измерения псевдодальности и псевдоскорости, а также демодулированная цифровая информация в виде пакетов в формате RS-485.
Конвертер 14 осуществляет усиление, фильтрацию и перенос спектра сигнала, поступающего с ВУП 6 на промежуточную частоту. Кроме того, конвертер 14 является формирователем тактовой частоты 35 МГц, поступающей в ПЛИС 17, входящей в состав УЦО 15. В УЦО 15 производится аналого-цифровое преобразование сигнала промежуточной частоты, поступающего из конвертера 14 в блок АЦП 16, входящий в состав УЦО 15 и дальнейшая цифровая обработка, реализованная на аппаратно-программном уровне в ПЛИС 17.
Радиоприемное устройство РПУ 13, в состав которого входят: конвертер и устройство цифровой обработки УЦО 15, состоит из аналого-цифрового преобразователя АЦП 16, ПЛИС 17 и процессора TMS 18, первый вход конвертера соединен в выходом ВУП и является ВЧ-входом РПУ, на второй вход конвертора подается опорный сигнал 5 МГц, третий вход конвертера соединен с выходом ПЛИС для подачи сигналов управления аттенюатором конвертора с целью фиксации уровня преобразованного сигнала МРЛ на выходе конвертора с точностью 1 дБ, в конверторе последовательно производится: предварительная фильтрация входного ВЧ-сигнала на керамическом фильтре VF2212B20 (RETEC-KORUS), перенос входного сигнала на первую промежуточную частоту 150 МГц, фиксация уровня преобразованного сигнала с помощью аттенюатора HRF-AT4521 (Honeywell), который позволяет изменять усиление конвертера на 32дБ с шагом 1дБ в зависимости от команд управления, поступающих с выхода ПЛИС в УЦО, основная фильтрация сигнала на первой промежуточной частоте с помощью ПАВ фильтра с полосой ±5,5МГц, первый выход конвертера соединен с входом АЦП 16, где сигнал промежуточной частоты оцифровывается для последующей обработки в ПЛИС 17, второй выход конвертера соединен с первым входом ПЛИС для передачи сигнала 35 МГц из которого формируется тактовая сетка частот для работы ПЛИС 17 и процессора 18 TMS320VC5416 (Texas Instruments), выход АЦП 16 соединен со вторым входом ПЛИС для передачи цифрового сигнала для последующей обработки корреляторами ПЛИС 17 (свертки с опорными сигналами несущей частоты и ПСП), на третий вход ПЛИС 17 поступают от ФРС синхросигналы: импульсный сигнал 1 Гц, привязанный к точке 0 град по фазе опорного сигнала 5 МГц, и сигнал синусоидальной формы 5,2 МГц, привязанный к тактовой сетке ПСП сигнала ФРС МРЛ, вход/выход ПЛИС соединен с первым входом/выходом процессора для обмена процессора с ПЛИС через 16-ти разрядную шину данных, второй вход/выход процессора соединен с входом/выходом конвертера для загрузки кодов частоты для гетеродинов конвертора и снятия ТМИ, третий вход/выход процессора соединен с общей внутренней магистралью обмена (RS-485), проходящей транзитом через БЛИК
Аппаратная часть цифровой обработки включает формирование опорных сигналов промежуточной частоты и ПСП, свертку входного и опорного сигналов с накоплением результата, измерение задержки принимаемой ПСП относительно бортовой шкалы времени. На программном уровне организованы следующие алгоритмы:
- поиск и обнаружение сигналов по частоте и задержке на основании данных прогноза,
- установление синхронизации по ПСП и фазе несущей частоты,
- слежение за принимаемыми сигналами,
- измерение псевдодальности и псевдоскорости,
- выделение передаваемой цифровой информации.
Блок логики и коммутации БЛИК 30 в БАМИ выполняет роль кроссоединительного устройства. В блоке располагаются источники вторичного электропитания ИВЭП приборов ФРС, РПУ, ВУП и блок распределения сигнала оцифровки БШВ.
РПДУ 2 является передающим устройством сантиметрового диапазона волн, выполняющим функцию усиления сигнала. Входной ВЧ сигнал поступает на вход усилителя мощности УМ 3. В выходном и предвыходном каскадах УМ 3 имеется схема автоматической регулировки мощности АРМ, обеспечивающая стабилизацию режима работы (по току стока) транзисторов.
Источник вторичного электропитания ИВЭП 4, формирующий напряжения +8, +10, +26 В, минус 5 В из напряжения 27 В для питания УМ 3, а также включающий или выключающий РПДУ 2, в зависимости от режима работы БАМИ.
Наличие напряжений на выходе РПДУ 2 контролируется телеметрией ТМ ИВЭП. Через промежуток времени от 20 до 40 с РПДУ 2 автоматически отключается. Таймер осуществляет защиту прибора от перегрева при отсутствии команды на выключение. КРУ 5 выполняет функцию коммутатора напряжения 27 В на блок ИВЭП 4 и УМ 3
Управление РПДУ 2 осуществляется посредством команд в соответствии с протоколами:
- стыковочных параметров БАМИ;
- логического взаимодействия БАМИ и БКУ;
- информационного обмена по мультиплексному каналу между БАМИ и БЦВК.
Входное устройство приемника ВУП 6 предназначено для предварительного усиления и фильтрации СВЧ сигналов. Схема защиты входных усилителей ВУП от высокой мощности ВЧ - радиосигнала устройства защиты 7 при работе в цикле ПЕРЕДАЧА собрана на p-i-n диодах. В момент включения РПДУ 2 подается напряжение запирания на аттенюатор устройства защиты 7, по который защищает вход ВУП 6. Первый каскад усиления реализован на малошумящем полевом транзисторе 8, для предварительной фильтрации внеполосных сигналов установлен двухзвенный керамический полосно-пропуекающий фильтр ППФ 10.
Таким образом, использование заявленного устройства на борту навигационных спутников позволяет обеспечить решение поставленной задачи с достижением технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой информационно-навигационный комплекс | 2017 |
|
RU2663680C1 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2014 |
|
RU2556878C1 |
| МНОГОКАНАЛЬНОЕ ПРИЕМНО-ДЕМОДУЛИРУЮЩЕЕ УСТРОЙСТВО ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ СИСТЕМ СВЯЗИ | 2005 |
|
RU2305375C2 |
| ПОДВИЖНАЯ АППАРАТНАЯ КВ-УКВ РАДИОСВЯЗИ | 2019 |
|
RU2711025C1 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ ЛИНИЙ СВЯЗИ ПО МОДЕЛИ СИГНАЛА И ПЕРЕПРОГРАММИРУЕМЫМ ЭЛЕКТРИЧЕСКИМ СХЕМАМ | 2005 |
|
RU2317641C2 |
| УСТРОЙСТВО ПЕРВИЧНОЙ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2017 |
|
RU2653293C1 |
| ВОЗБУДИТЕЛЬ ДЛЯ РАДИОПЕРЕДАТЧИКОВ | 2016 |
|
RU2625527C1 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОГО СИГНАЛА СВЕРХДЛИННОВОЛНОВОЙ РАДИОСТАНЦИИ | 2020 |
|
RU2766573C2 |
| ВЕДОМСТВЕННАЯ СИСТЕМА ДВУХСТОРОННЕЙ ВЫСОКОСКОРОСТНОЙ РАДИОСВЯЗИ С ЭФФЕКТИВНЫМ ИСПОЛЬЗОВАНИЕМ РАДИОЧАСТОТНОГО СПЕКТРА | 2016 |
|
RU2650191C1 |
Изобретение относится к области радиотехники, а именно к космической межспутниковой связи, и может быть использовано в космической спутниковой навигационной группировке ГЛОНАСС. Технический результат заключается в увеличении объема и достоверности передаваемой и принимаемой информации. Для этого бортовая аппаратура межспутниковых измерений (БАМИ) состоит из радиопередающего устройства, циркулятора, приемо-передающей антенны, входного усилителя приемника, радиоприемного устройства, модульного контроллера управления, формирователя радиосигнала, блока логики и коммутации, что также позволяет обеспечить автономность функционирования космической спутниковой группировки, повысить точность эфемеридного и частотно-временного обеспечения системы, оперативную доставку информации со всех навигационных космических аппаратов (НКА), передачу командно-программной и прием телеметрической информации, оперативный контроль целостности космической системы, передачу данных на НКА единой космической системы, снижение нагрузки на вычислительные средства наземного комплекса управления. 1 ил.
Бортовая аппаратура межспутниковых измерений (БАМИ) состоит из радиопередающего устройства (РПДУ), в состав которого входят: усилитель мощности сигнала (УМ), первый вход которого является входом РПДУ, выход которого является выходом РПДУ, источник вторичного электропитания (ИВЭП), первый выход которого соединен со вторым входом УМ, контактно распределительное устройство (КРУ), выход которого соединен с входом ИВЭП, на первый вход КРУ подается напряжение от внешних бортовых систем, также в состав БАМИ входят приемопередающая антенна и циркулятор, вход антенны соединен с выходом циркулятора, вход циркулятора соединен с выходом РПДУ, входной усилитель приемника (ВУП), в состав которого входят: устройство защиты, первый вход которого является входом ВУП и соединен с выходом циркулятора, малошумящий усилитель, вход которого соединен с выходом устройства защиты, промежуточный усилитель, вход которого соединен с выходом малошумящего усилителя, полосовой фильтр (ППФ), вход которого соединен с выходом промежуточного усилителя, и оконечное устройство, вход которого соединен с выходом ППФ, а выход оконечного устройства является выходом ВУП, второй вход устройства защиты соединен с вторым выходом ИВЭП, также в состав БАМИ входит радиоприемное устройство РПУ, в состав которого входят: конвертер и устройство цифровой обработки (УЦО), состоящее из аналого-цифрового преобразователя (АЦП), программированной логической интегральной схемы (ПЛИС) и процессора, первый вход конвертера является входом РПУ и соединен в выходом ВУП, первый выход конвертера соединен со входом АЦП, второй выход конвертера соединен с первым входом ПЛИС, выход АЦП соединен со вторым входом ПЛИС, вход/выход ПЛИС соединен с первым входом/выходом процессора, второй вход/выход процессора соединен с входом/выходом конвертера, третий вход конвертера соединен с выходом ПЛИС, в состав БАМИ также входит модульный контроллер управления (МКУ), состоящий из контроллера управления, интерфейса манчестерского канала обмена (МКО), первый вход/выход которого соединен с первым входом/выходом контроллера управления, синхронизатора, второй вход/выход которого соединен с вторым входом/выходом контроллера управления, платы согласования и приема сигналов бортового синхронизирующего устройства (БСУ), первый вход/выход которой соединен с первым входом/выходом синхронизатора, выход платы согласования и приема сигналов БСУ соединен со вторым входом КРУ, второй вход/выход платы согласования и приема сигналов БСУ соединен с входом/выходом ИВЭП, четвертая шина интерфейса манчестерского канала обмена (МКО) является внешней шиной устройства БАМИ, также в состав БАМИ входит формирователь радиосигнала (ФРС), состоящий из платы формирования цифрового сигнала (ФЦС), платы формирования высокой частоты (ФВЧ), первый выход ФВЧ соединен со входом РПДУ, а второй и третий выходы ФВЧ соединены со вторым и третьим входами ФЦС соответственно, второй, третий и четвертый входы ФВЧ соединены со вторым, третьим и четвертым выходами ФЦС соответственно, платы распределения 5 МГц, общий выход которой соединен с первым входом ФВЧ и вторым входом конвертера, на вход платы распределения 5 МГц подается сигнал частотой 5 МГц, платы распределения 1 с, общий выход которой соединен с первым входом ФЦС, на вход платы распределения 1 с подается сигнал секундной метки, платы распределения 1 с и 5.2 МГц, вход которой соединен с первым выходом ФЦС, также в состав БАМИ входит блок логики и коммутации (БЛИК), причем ФЦС связан с контроллером управления посредством первой шины, соединенной между ФЦС и БЛИК, третьей шины, соединенной между синхронизатором и БЛИК, и далее второго входа/выхода синхронизатора, процессор связан с контроллером управления посредством второй шины, соединенной между процессором и БЛИК, третьей шины, соединенной между синхронизатором и БЛИК и далее второго входа/выхода синхронизатора, выход платы распределения 1 с и 5.2 МГц соединен через БЛИК с третьим входом ПЛИС, общий выход платы разветвления 1 с соединен через БЛИК со входом приемника сигналов БСУ, выход синхронизатора соединен через БЛИК со вторым входом КРУ, третий выход ИВЭП соединен через БЛИК со входом синхронизатора, первый, второй, третий и четвертый выходы питания БЛИК соединены со входами питания МКУ, ВУП, РПУ и ФРС соответственно, вход БЛИК соединен с источником внешнего питания.
| Бакитько Р.В | |||
| и др | |||
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| / Под ред | |||
| Перова А.И., Харисова В.Н., изд | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Радиотехника, 2005, с.с.448, 449 | |||
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| WO 9309613 А1, 13.05.1993. | |||

