Известен способ эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы (ГНСС), при котором параметры орбит и эфемериды каждого космического аппарата (КА) определяют с помощью разветвленной сети наземных контрольных измерительных станций [1, с.16-17]. Под эфемеридным обеспечением понимают определение и прогноз параметров движения всех КА ГНСС с целью последующей передачи этой информации космическими аппаратами в навигационном сообщении потребителям [1, с.15]. Параметры движения КА ГНСС, передаваемые в навигационном сообщении, называют эфемеридной информацией [1, с.14].
Сеть наземных станций не обеспечивает постоянное взаимодействие КА ГНСС с наземным комплексом управления ГНСС, поэтому обновление (уточнение) эфемеридной информации на борту КА ГНСС выполняют периодически. Так в ГНСС ГЛОНАСС используется технология эфемеридного обеспечения, при которой обновление эфемеридной информации осуществляют один или два раза в сутки, а продолжительность прогнозируемого интервала полета составляет около двух витков, т.е. около одних суток [1, с.303]. Исходной информацией для расчета эфемеридной информации служат значения текущих навигационных параметров движения КА, измеренные наземными контрольными станциями и переданные в координационно-вычислительный центр управления ГНСС, в котором осуществляют определение орбит и расчет эфемеридной информации. При этом для высокоточных расчетов эфемеридной информации ежесуточно осуществляют 10…12 сеансов измерений по каждому КА ГНСС [1, с.302]. Для эфемеридного обеспечения процесса управления функционированием каждого КА ГНСС ежесуточно выполняют следующие действия [1, с.301-307]:
- измерение текущих навигационных параметров движения КА с помощью наземных контрольных измерительных станций;
- передачу результатов измерений для обработки в координационно-вычислительный центр;
- определение параметров орбиты КА по результатам измерений;
- прогнозирование параметров орбиты КА;
- расчет эфемеридной информации;
- передачу эфемеридной информации на наземные загрузочные станции;
- передачу эфемеридной информации на борт КА с помощью наземных загрузочных станций.
Определение, прогнозирование параметров орбиты каждого КА ГНСС и расчет эфемеридной информации выполняют в координационно-вычислительном центре.
Недостатками описанного способа эфемеридного обеспечения являются:
- большое количество ежесуточных измерений текущих навигационных параметров, выполняемых наземными контрольными измерительными станциями и необходимых для расчета эфемеридной информации с требуемой точностью (для 24 КА ГНСС требуется проведение около 240 сеансов измерений текущих навигационных параметров);
- появление погрешности эфемерид КА ГНСС, возникающей вследствие отличия прогнозируемого физического состояния космической среды от действительного состояния на интервале полета, на котором осуществляется прогнозирование движения КА и расчет эфемерид, в связи с тем, что продолжительность интервала прогноза эфемерид составляет около одних суток [1, с.303].
Следствием большого количества измерений являются значительные затраты ресурсов наземного комплекса управления для эфемеридного обеспечения процесса управления КА ГНСС. При использовании описанного способа, в котором применяются измерения наземных станций, погрешность эфемерид может быть уменьшена за счет более частого обновления эфемеридной информации на борту и таким образом уменьшения продолжительности интервала прогнозирования. Однако практическая реализация такой возможности затруднительна в связи с большой загрузкой и ограниченными ресурсами наземного комплекса управления ГНСС.
Известен способ-прототип эфемеридного обеспечения, позволяющий повысить точность эфемерид, при котором для измерения параметров взаимного движения КА ГНСС, определения (уточнения) параметров их орбит применяется бортовая аппаратура межспутниковых измерений (БАМИ) [1, с.448-458], предназначенная для решения следующих задач: измерения параметров взаимного движения КА ГНСС; передачи эфемерид и частотно-временных поправок в сети КА ГНСС. Измерение параметров взаимного движения осуществляется путем измерения псевдодальностей и псевдоскоростей движения одних КА ГНСС относительно других. В соответствии со способом-прототипом бортовая аппаратура межспутниковых измерений, установленная на борту КА ГНСС, должна применяться для выполнения следующих действий [1, с.448]:
- формирование и передача измерительных сигналов для приема их на всех КА ГНСС, находящихся в зоне радиовидимости излучающего КА;
- прием измерительных сигналов от всех излучающих КА, находящихся в зоне радиовидимости КА, принимающего измерительные сигналы;
- измерение временного сдвига принимаемых измерительных сигналов относительно местной шкалы времени и измерение псевдодальностей и псевдоскоростей;
- передача и прием измерительной, эфемеридной и временной информации.
Для обеспечения возможности измерения псевдодальностей и псевдоскоростей с помощью наземных станций осуществляют синхронизацию бортовой шкалы времени каждого КА ГНСС с системной шкалой времени, поддерживаемой наземным эталоном [1, с.36-37].
Способ-прототип позволяет снизить погрешность эфемерид, возникающую ввиду большой продолжительности интервала прогноза, за счет частого уточнения параметров орбит с помощью БАМИ и последующего расчета эфемерид бортовым комплексом управления каждого КА ГНСС.
Способ-прототип обеспечивает высокоточное определение параметров взаимного положения КА орбитальной группировки ГНСС в инерциальном пространстве. Однако для высокоточных навигационных определений потребителей навигационной информации ГНСС необходимо определить параметры орбит КА в системе координат, связанной с вращающейся Землей, иначе говоря, выполнить привязку параметров орбитальной группировки ГНСС к системе координат потребителя навигационной информации. Привязка достигается определением орбиты одного или нескольких КА с помощью наземных контрольных измерительных станций. После передачи на борт некоторого КА эфемеридной информации, рассчитанной по измерениям наземных станций, способ позволяет уточнить параметры орбит и эфемериды всех КА орбитальной группировки ГНСС относительно этого КА. Такой КА по существу может рассматриваться как КА-эталон, относительно которого непосредственно осуществляют уточнение орбит КА ГНСС. Для обеспечения непрерывного поддержания высокой точности эфемерид КА ГНСС относительно систем координат, связанных с Землей, необходимо поддерживать высокую точность эфемерид одного или нескольких КА-эталонов, что диктует необходимость проведения измерений текущих навигационных параметров их орбит с помощью наземных контрольных измерительных станций.
Недостатком способа является необходимость проведения измерений текущих навигационных параметров движения КА ГНСС с помощью разветвленной сети наземных контрольных измерительных станций. Это диктует необходимость затрат ресурсов, во-первых, для проведения наземным комплексом измерений текущих навигационных параметров, расчета эфемерид и передачи их на борт КА, во-вторых, для поддержания разветвленной сети контрольных измерительных станций наземного комплекса в работоспособном состоянии. Так как измерительные станции являются дорогостоящими техническими системами, затраты ресурсов являются значительными. Кроме того, не все КА орбитальной группировки ГНСС могут быть видимы одним КА-эталоном. Так при обзоре с любого КА орбитальной группировки ГНСС часть из них закрыта Землей, поэтому рассчитать эфемериды всех КА орбитальной группировки ГНСС непосредственно относительно одного КА-эталона невозможно. Это вызывает:
- или необходимость уточнения эфемерид тех КА ГНСС, которые невидимы КА-эталоном, путем межспутниковых измерений относительно других КА, эфемериды которых рассчитаны непосредственно относительно КА-эталона, что приводит к накоплению погрешности расчета эфемерид, неизбежно возникающей в процессе проведения таких межспутниковых измерений;
- или необходимость использования нескольких КА-эталонов, что приводит к увеличению затрат ресурсов наземного комплекса управления ГНСС для расчета эфемерид нескольких КА-эталонов.
Задача, на решение которой направлено заявленное изобретение, состоит в снижении затрат ресурсов на эксплуатацию группировки КА ГНСС за счет снижения расхода ресурсов на расчет эфемеридной информации, необходимой для формирования навигационных сообщений КА ГНСС.
Основной технический результат, достигаемый заявленным изобретением, заключается в обеспечении требуемой высокой точности расчета эфемеридной информации при управлении функционированием КА ГНСС без проведения измерений параметров их движения наземными контрольными измерительными станциями и отсутствии необходимости проводить расчеты эфемеридной информации в наземном комплексе управления, что позволяет снизить расходы ресурсов на эксплуатацию ГНСС.
Сущность изобретения состоит в том, что для эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы осуществляют синхронизацию бортовой шкалы времени каждого космического аппарата с системной шкалой времени, измеряют псевдодальности и псевдоскорости движения КА с помощью бортовой аппаратуры межспутниковых измерений, согласно изобретению на орбиту с прямым или обратным наклонением выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы, аппаратуру измерения текущих навигационных параметров движения по сигналам эфирного телевидения наземных стационарных телевизионных радиостанций и определения по ним параметров орбиты низкоорбитального космического аппарата, бортовую аппаратуру межспутиковых измерений, при орбитальном полете синхронизируют бортовую шкалу времени низкоорбитального космического аппарата с системной шкалой времени глобальной навигационной спутниковой системы, определяют параметры орбиты низкоорбитального космического аппарата по сигналам телевизионных радиостанций, проводят межспутниковые измерения параметров движения космических аппаратов навигационной системы относительно низкоорбитального космического аппарата, на борту низкоорбитального космического аппарата формируют навигационное сообщение, содержащие параметры его орбиты, измеренные по телевизионным сигналам, которое транслируют и принимают на борту космических аппаратов навигационной системы, в бортовых комплексах управления космических аппаратов навигационной системы определяют параметры их орбит и эфемериды по межспутниковым измерениям и параметрам орбиты низкоорбитального космического аппарата.
Существенные признаки, характеризующие изобретение:
1. Выведение на орбиту низкоорбитального космического аппарата, на борту которого размещена аппаратура (совокупность аппаратных средств), позволяющая проводить:
- синхронизацию бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы с помощью штатных наземных станций, используемых для синхронизации бортовых шкал времени КА ГНСС с системной шкалой времени;
- высокоточное определение параметров орбиты низкоорбитального космического аппарата по сигналам эфирного телевидения наземных стационарных телевизионных радиостанций;
- межспутниковые измерения параметров движения КА ГНСС относительно низкоорбитального космического аппарата.
2. Выполнение следующей совокупности последовательных действий для расчета эфемерид КА ГНСС:
- синхронизация бортовой шкалы времени низкоорбитального КА с системной шкалой времени глобальной навигационной спутниковой системы путем применения штатных наземных станций, используемых для синхронизации бортовых шкал времени КА ГНСС с системной шкалой времени;
- определение параметров орбиты низкоорбитального КА по текущим навигационным параметрам, измеренным по телевизионным сигналам;
- проведение межспутниковых измерений параметров движения КА ГНСС относительно низкоорбитального КА путем применения бортовой аппаратуры межспутниковых измерений, описанной в изложении способа-прототипа [1, с.448-458] и устанавливаемой на низкоорбитальном КА и КА ГНСС;
- формирование на борту низкоорбитального КА, относительно которого космическими аппаратами ГНСС проводились межспутниковые измерения, навигационного сообщения, содержащего параметры орбиты низкоорбитального космического аппарата, измеренные по телевизионным сигналам;
- трансляция сформированного навигационного сообщения бортовой аппаратурой низкоорбитального космического аппарата и прием его бортовой аппаратурой КА ГНСС;
- определение (уточнение) параметров орбиты КА ГНСС бортовыми комплексами управления по межспутниковым измерениям, выполненным бортовой аппаратурой космических аппаратов ГНСС относительно низкоорбитального КА, и параметрам орбиты низкоорбитального КА, содержащимся в навигационном сообщении, переданном низкоорбитальным КА;
- расчет эфемерид КА орбитальной группировки ГНСС бортовыми комплексами управления КА ГНСС.
Признаки, отличающие заявленный способ от способа-прототипа:
1) выведение на орбиту низкоорбитального КА, на борту которого установлена указанная выше совокупность аппаратных средств;
2) проведение КА ГНСС межспутниковых измерений относительно низкоорбитального КА для высокоточного определения орбит КА ГНСС;
3) отсутствие необходимости проведения измерений параметров орбит КА ГНСС с помощью наземных контрольных измерительных станций.
В основу изобретения положена возможность высокоточного определения орбиты низкоорбитального КА по сигналам наземных телевизионных радиостанций эфирного телевидения. В предложенном способе орбиту низкоорбитального КА определяют по значениям радиальной скорости VR движения КА относительно телевизионных радиостанций, измеренным бортовой аппаратурой. Возможность использования телевизионных сигналов для измерения радиальной скорости VR с необходимой высокой точностью обусловлена высокой стабильностью несущих частот изображения телевизионных сигналов. Радиостанции эфирного телевидения имеют высокую мощность излучения, и на территории РФ создана разветвленная сеть радиостанций с известными координатами излучателей, включающая в настоящее время около 350 радиостанций мощностью от 5 до 50 кВт [2]. Погрешность измерения радиальной скорости VR по сигналам телевизионного вещания при беззапросном методе измерения радиальной скорости движения относительно телевизионной радиостанции оценивается формулой [3, с.155]:

где С, ΔС - скорость света и погрешность ее определения;

 - частота и отклонение частоты эталонного генератора КА от номинального значения;
- частота и отклонение частоты эталонного генератора КА от номинального значения;
 ,
,  - частота и отклонение частоты эталонного генератора телевизионной радиостанции от номинального значения;
- частота и отклонение частоты эталонного генератора телевизионной радиостанции от номинального значения;
 - инструментальная погрешность измерения доплеровского смещения частоты.
- инструментальная погрешность измерения доплеровского смещения частоты.
Предположим, что на телевизионной радиостанции и КА установлены генераторы эталонной частоты, у которых характеристики относительной нестабильности эталонных генераторов частоты близки:Δƒ0/ƒ0≈Δƒ0КА/ƒ0КА. Такое предположение не нарушает строгости анализа, но позволяет сократить изложение результатов анализа. Учитывая, что VR<<C, а также неопределенность знаков отклонения частоты от номинального значения  и инструментальной погрешности измерения
и инструментальной погрешности измерения  , уравнение для оценки ошибки измерения радиальной скорости представим в виде
, уравнение для оценки ошибки измерения радиальной скорости представим в виде

Оценку дисперсии измерения радиальной скорости запишем в виде

где  - дисперсия погрешности измерения скорости света;
- дисперсия погрешности измерения скорости света;
 - дисперсия отклонения частоты эталонных генераторов от номинального значения;
- дисперсия отклонения частоты эталонных генераторов от номинального значения;
 - дисперсия инструментальной погрешности измерения доплеровского смещения частоты.
- дисперсия инструментальной погрешности измерения доплеровского смещения частоты.
Первые слагаемые в (1), (2) вызваны неточностью сведений о скорости распространения радиоволн. Относительная погрешность скорости света оценивается выражением
 ,
,
где  - относительная погрешность скорости света в вакууме;
- относительная погрешность скорости света в вакууме;
 ,
,  - - отклонения скорости света от номинального значения,
- - отклонения скорости света от номинального значения,
обусловленные действием тропосферы и ионосферы соответственно.
Относительная погрешность скорости света в вакууме составляет  Поэтому вклад величины
Поэтому вклад величины  в оценку погрешности измерения радиальной скорости пренебрежимо мал. Погрешность тропосферного измерения радиальной скорости невелика [4], для решения задач навигации КА ею можно пренебречь. Так как телевизионные сигналы транслируются в различных частотных диапазонах, для исключения ошибки определения радиальной скорости, обусловленной влиянием ионосферы, в соответствии с предложенным способом, измеряют доплеровское смещение несущих частот изображения двух телевизионных каналов и применяют двухчастотный метод учета ионосферной погрешности. Поэтому погрешностью первого слагаемого выражений (1), (2) можно пренебречь.
в оценку погрешности измерения радиальной скорости пренебрежимо мал. Погрешность тропосферного измерения радиальной скорости невелика [4], для решения задач навигации КА ею можно пренебречь. Так как телевизионные сигналы транслируются в различных частотных диапазонах, для исключения ошибки определения радиальной скорости, обусловленной влиянием ионосферы, в соответствии с предложенным способом, измеряют доплеровское смещение несущих частот изображения двух телевизионных каналов и применяют двухчастотный метод учета ионосферной погрешности. Поэтому погрешностью первого слагаемого выражений (1), (2) можно пренебречь.
Второе слагаемое (1), (2) обусловлено нестабильностью эталонных генераторов частоты. Нестабильность частоты характеризуется отношением ее отклонения от номинального значения к номинальной частоте и складывается из кратковременной и долговременной нестабильности частоты. Дисперсию частоты представим в виде  - дисперсия долговременной нестабильности;
- дисперсия долговременной нестабильности;  - дисперсия кратковременной нестабильности. Для исключения ошибки, обусловленной долговременной нестабильностью эталона частоты, в соответствии с предложенным способом, применяют псевдодоплеровский метод навигации.
- дисперсия кратковременной нестабильности. Для исключения ошибки, обусловленной долговременной нестабильностью эталона частоты, в соответствии с предложенным способом, применяют псевдодоплеровский метод навигации.
В соответствии с требованиями к телевизионным передатчикам, установленным ГОСТ 20532-83, при работе телевизионных передатчиков в режиме точного смещения несущих частот допускается отклонение несущей частоты телевизионного канала от номинального значения на суточном временном интервале ±1 Гц, а в течение одного месяца ±100 Гц [5, с.8].
Для определения параметров орбиты достаточным является проведение сеансов измерения радиальной скорости КА продолжительностью одна минута. На таких интервалах при режиме точного смещения несущих частот относительная кратковременная нестабильность эталонов частоты телевизионных передатчиков, транслирующих радиоволны дециметрового диапазона, составит 10-11-10-12.
Обеспечение относительной стабильности частоты бортового эталона 10-11-10-12 на интервале нескольких минут достигается при использовании современных стандартов частоты, выпускаемых серийно [6, с.6].
Таким образом, погрешность измерения радиальной скорости, вызываемая вторым слагаемым выражений (1), (2) зависит от кратковременной нестабильности наземного и бортового эталонов частоты, и при  составит 0,006 м/с, а при
составит 0,006 м/с, а при  .
.
Потенциальная погрешность измерения доплеровского смещения частоты принимаемого сигнала оценивается дисперсией по выражению [6, с.103]

где d - расстояние между телевизионной радиостанцией и КА;
k=1,37·10-23 Вт/(К·Гц) - постоянная Больцмана;
 - эквивалентная шумовая температура (по Кельвину);
- эквивалентная шумовая температура (по Кельвину);
 - длительность интервала измерения;
- длительность интервала измерения;
 - доплеровский сдвиг частоты на интервале ;
- доплеровский сдвиг частоты на интервале ;
 - коэффициент, характеризующий мощность излучения телевизионной радиостанции в свободное пространство;
- коэффициент, характеризующий мощность излучения телевизионной радиостанции в свободное пространство;
P - мощность телевизионной радиостанции.
В методике оценки потенциальной точности измерения радиальной скорости, опубликованной в работе [7, с.103], длительность интервала измерения составляет  Для низкоорбитальных КА при таком интервале измерения доплеровское смещение несущей частоты 12 телевизионного канала составит
Для низкоорбитальных КА при таком интервале измерения доплеровское смещение несущей частоты 12 телевизионного канала составит  Погрешность измерений реальной аппаратуры выше потенциальной. Увеличение погрешности обусловлено свойствами аппаратуры приемно-измерительного тракта. Предположим, что бортовая аппаратура позволяет проводить измерения с погрешностью, которая выше потенциальной не более чем в 10 раз, а случайные ошибки измерения распределены по нормальному закону. Тогда с вероятностью 0,95 инструментальная погрешность измерения радиальной скорости не превысит значений
Погрешность измерений реальной аппаратуры выше потенциальной. Увеличение погрешности обусловлено свойствами аппаратуры приемно-измерительного тракта. Предположим, что бортовая аппаратура позволяет проводить измерения с погрешностью, которая выше потенциальной не более чем в 10 раз, а случайные ошибки измерения распределены по нормальному закону. Тогда с вероятностью 0,95 инструментальная погрешность измерения радиальной скорости не превысит значений  .
.
Из диаграмм направленности телевизионных антенн следует, что около 10% мощности телевизионных радиостанций излучается в свободное пространство [8, стр.273], поэтому в выражении (3) примем 
Таким образом, инструментальная погрешность измерения радиальной скорости КА на расстоянии d<2000 км от телевизионной радиостанции по сигналу 12 телевизионного канала при эквивалентной шумовой температуре Tш=300К,  Р=25кВт составит 0,0001 м/с. Оценку погрешности измерения радиальной скорости получим, суммируя слагаемые выражения (1), и при
Р=25кВт составит 0,0001 м/с. Оценку погрешности измерения радиальной скорости получим, суммируя слагаемые выражения (1), и при  , d=1500 км, Tш=300К, Р=25кВт она не превысит 0,001 м/с. Такое значение погрешности соответствует погрешности наземных измерительных средств, применяемых для измерения параметров орбиты штатных НКА ГНСС.
, d=1500 км, Tш=300К, Р=25кВт она не превысит 0,001 м/с. Такое значение погрешности соответствует погрешности наземных измерительных средств, применяемых для измерения параметров орбиты штатных НКА ГНСС.
Определение параметров орбиты по измеренным значениям радиальной скорости осуществляется методами, изложенными в работе [8, с.145-185]. При этом, так как погрешность измерения текущих навигационных параметров низкоорбитальных КА по сигналам телевещания соответствует погрешности штатных средств, предназначенных для измерения параметров орбиты КА ГНСС, погрешность определения орбиты КА-эталона соответствует погрешности определения параметров орбиты КА ГНСС.
В заявленном способе низкоорбитальный КА, параметры орбиты которого определяют по телевизионным сигналам, является по существу КА-эталоном, относительно которого выполняют межспутниковые измерения, определяют (уточняют) параметры орбиты и эфемериды КА ГНСС. Параметры орбиты КА-эталона определяют и затем непрерывно поддерживают требуемую высокую точность их определения за счет измерения текущих навигационных параметров его движения по сигналам эфирного телевидения стационарных телевизионных радиостанций. Непрерывность поддержания высокой точности достигается за счет проведения измерений текущих навигационных параметров низкоорбитального КА по сигналам большого количества телевизионных радиостанций, расположенных на земной поверхности вдоль трассы его полета. При этом КА-эталон рекомендуется выводить на околокруговую орбиту высотой около 1000 км. Рекомендация обусловлена тем, что созданы и эффективно применяются методы высокоточного определения орбит и прогнозирования движения КА, находящихся на околокруговых орбитах с высотой полета около 1000 км, разработанные для эфемеридного обеспечения процесса управления КА спутниковых навигационных систем первого поколения (космические системы «Цикада» [1, с.7-8], «Транзит»).
В заявленном способе для высокоточного расчета эфемерид КА ГНСС не требуется применения разветвленной сети наземных контрольных измерительных станций, что позволяет существенно уменьшить требования к количественному составу необходимых наземных контрольных измерительных станций, и в итоге уменьшить затраты ресурсов наземного комплекса управления на эксплуатацию ГНСС. Для синхронизации бортовых шкал времени всех КА ГНСС и бортовой шкалы времени низкоорбитального КА, относительно которого бортовая аппаратура межспутниковых измерений КА ГНСС измеряет псевдодальности и псевдоскорости, с системной шкалой времени, достаточно применения одной наземной станции. При использовании одной станции обеспечивается возможность синхронизации бортовых шкал времени КА ГНСС и низкоорбитального КА 2 раза в сутки, так же как в рассмотренных выше известных способах эфемеридного обеспечения.
Заявленный способ, так же как способ-прототип, позволяет обеспечить низкую погрешность расчета эфемерид КА ГНСС, вызываемую отличием прогнозируемого физического состояния космической среды от действительного состояния на интервале полета, на котором осуществляется прогнозирование эфемерид КА, за счет более частого обновления эфемерид по результатам бортовых измерений. В заявленном способе это достигается проведением межспутниковых измерений относительно низкоорбитального КА-эталона, высокую точность определения орбит которого поддерживают непрерывно. Однако в отличии от способа-прототипа для высокоточного расчета эфемерид КА-эталона в системе координат, связанной с Землей, не требуется проведения измерений параметров его движения наземными контрольными измерительными станциями.
При этом в связи с существенным отличием периодов обращения вокруг Земли низкоорбитального КА и КА ГНСС применение одного низкоорбитального КА-эталона обеспечивает возможность нахождения каждого КА ГНСС в зоне радиовидимости низкоорбитального КА-эталона и проведения межспутниковых измерений между ним и каждым КА ГНСС в течении одного периода обращения низкоорбитального КА-эталона. На суточном интервале полета низкоорбитального КА образуется несколько интервалов времени, в течение которых низкоорбитальный КА и любой КА ГНСС находятся в прямой видимости, и между ними могут быть проведены межспутниковые измерения.
Так КА-эталон при нахождении на околокруговой орбите высотой около 1000 км совершает 15 витков вокруг Земли на суточном интервале полета, а КА ГНСС - 2 витка. При этом в течение одних суток при прямом наклонении орбиты низкоорбитального КА-эталона образуется 13 интервалов времени, в течение которых любой КА ГНСС и низкоорбитальный КА находятся в прямой видимости, и 17 подобных интервалов времени при обратном наклонении орбиты КА-эталона. Таким образом, обеспечивается возможность проведения межспутниковых измерений между низкоорбитальным КА-эталоном и любым КА ГНСС 13 раз (в сутки) при прямом наклонением орбиты КА-эталона и 17 раз (в сутки) при обратном наклонении орбиты КА-эталона.
В способе-прототипе энергетику межспутниковой радиолинии рассчитывают так, чтобы обеспечить возможность приема измерительных сигналов, излучаемых БАМИ некоторого КА ГНСС, всеми видимыми КА орбитальной группировки ГНСС, при этом максимальная дальность при межспутниковых измерениях составляет 52600 км [1, с.452]. В заявленном способе при условии, что высота орбиты КА-эталона не превышает 2000 км, его орбитальное движение проходит в зоне излучения радионавигационных сигналов КА ГНСС, которая охватывает диск Земли и приземный слой космического пространства, простирающийся от земной поверхности до высоты 2000 км. При этом максимальная дальность между низкоорбитальным КА и КА ГНСС не превысит 28000 км.
В заявленном изобретении при проведении межспутниковых измерений максимальное расстояние между КА-эталоном и КА ГНСС почти в 2 раза меньше максимального расстояния между излучающим и принимаемым КА ГНСС, соответствующим способу-прототипу. Это позволяет уменьшить мощность на выходе передатчика бортовой аппаратуры межспутниковых измерений и снизить энергетические затраты при проведении межспутниковых измерений.
Таким образом, из представленного анализа следует, что заявленный способ обеспечивает получение нескольких технических результатов. Достоинствами способа являются следующие технические возможности (результаты):
- высокоточного эфемеридного обеспечения процесса управления КА ГНСС при использовании одной наземной станции, применяемой для синхронизации бортовых шкал времени КА ГНСС и низкоорбитального КА с системной шкалой времени ГНСС, при этом не требуется использование разветвленной сети наземных контрольных измерительных станций для измерения параметров движения КА ГНСС;
- снижения требуемой мощности передатчика бортовой аппаратуры межспутниковых измерений при проведении межспутниковых измерений параметров орбит КА ГНСС относительно низкоорбитального КА-эталона;
- снижения погрешности расчета эфемерид всех КА орбитальной группировки ГНСС при использовании только одного низкоорбитального КА в качестве КА-эталона, относительно которого проводят определение (уточнение) параметров орбиты КА ГНСС, так применение КА-эталона с высотой орбиты, равной 1000 км, обеспечивает возможность уточнения параметров орбиты всех КА ГНСС не менее чем 13 раз в сутки.
Снижение погрешности расчета эфемерид всех КА ГНСС позволяет повысить точность навигационных определений потребителей навигационной информации. В заявленном изобретении высокую точность определения параметров орбиты КА-эталона поддерживают постоянно, что позволяет при использовании БАМИ постоянно поддерживать высокую точность определения эфемерид КА ГНСС.
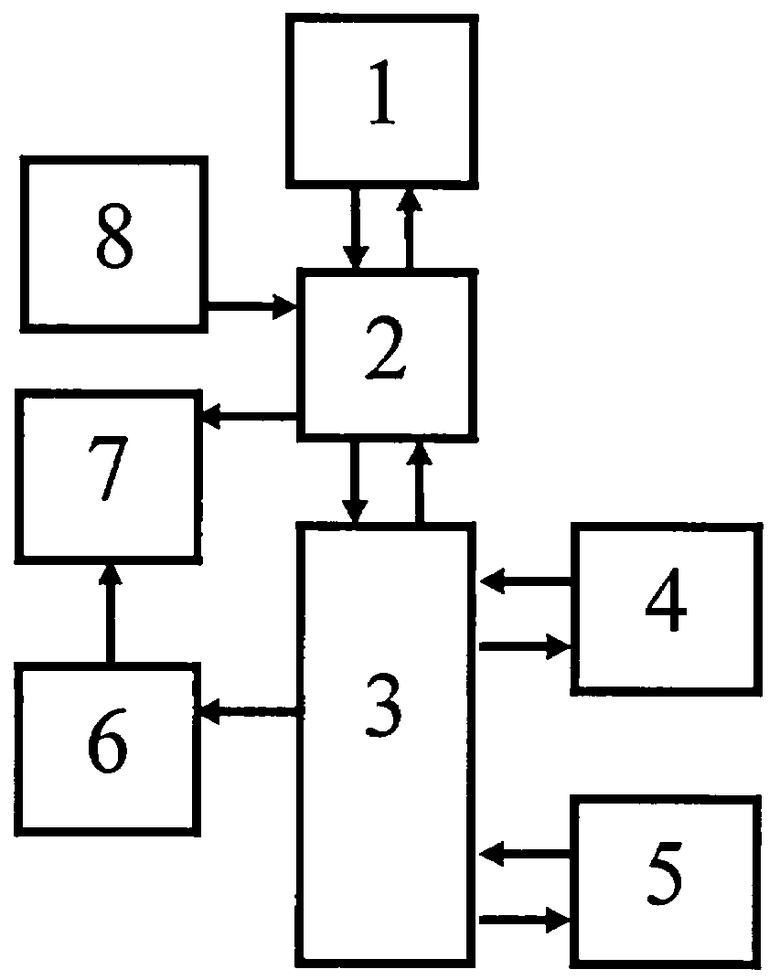
Блок-схема устройства, предназначенного для установки на борту низкоорбитального космического аппарата и осуществления предлагаемого способа, представлена на чертеже.
Устройство содержит антенну 1, направленную к центру Земли, приемо-передающее устройство 2, бортовую цифровую вычислительную машину (БЦВМ) 3, аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы 4, аппаратуру измерения текущих навигационных параметров движения по сигналам эфирного телевидения наземных стационарных телевизионных радиостанций и определения по ним параметров орбиты низкоорбитального космического аппарата 5, аппаратуру межспутниковых измерений 6, передающую антенну 7 и приемную антенну 8, обе направленные в космическое пространство противоположно центру Земли.
При этом первый вход приемо-передающего устройства 2 соединен с выходом антенны 1, а второй вход соединен с первым выходом БЦВМ 3, третий вход устройства 2 соединен с выходом антенны 8, первый выход приемо-передающего устройства 2 соединен со входом антенны 1, второй выход соединен с первым входом БЦВМ 3, третий выход устройства 2 соединен с первым входом антенны 7, второй вход БЦВМ 3 соединен с выходом аппаратуры 4, третий вход БЦВМ 3 соединен с выходом аппаратуры 5, второй выход БЦВМ 3 соединен со входом аппаратуры 4, третий выход БЦВМ 3 соединен со входом аппаратуры 5, четвертый выход БЦВМ 3 соединен со входом аппаратуры 6, выход аппаратуры 6 соединен со вторым входом антенны 7.
Устройство работает следующим образом.
Аппаратура 4 осуществляет синхронизацию бортовой шкалы времени с системной шкалой времени. При этом сигналы, соответствующие значениям времени бортовой шкалы, необходимые для расчета поправок бортовой шкалы к системной шкале времени, поступают с выхода аппаратуры 4 на второй вход БЦВМ 3, формирующей радиосигнал, который затем поступает с первого выхода БЦВМ 3 на второй вход приемо-передающего устройства 2, затем с первого выхода устройства 2 на вход антенны 1, которая транслирует радиосигнал в направлении наземной контрольной станции, осуществляющей синхронизацию. Антенна 1 принимает сигналы значений поправок бортовой шкалы к системной шкале времени, рассчитанных и переданных наземной контрольной станцией, которые поступают с выхода антенны 1 на первый вход приемо-передающего устройства 2, потом со второго выхода устройства 2 на первый вход БЦВМ 3, и затем со второго выхода БЦВМ 3 на вход аппаратуры 4.
Аппаратура 5 определяет параметры орбиты низкоорбитального космического аппарата по телевизионным сигналам. При этом антенна 1 принимает сигналы телевизионных радиостанций, которые с выхода антенны 1 поступают на первый вход приемо-передающего устройства 2, затем со второго выхода устройства 2 на первый вход БЦВМ 3, затем с третьего выхода БЦВМ 3 на вход аппаратуры 5, которая измеряет значения текущих навигационных параметров по телевизионным сигналам и определяет параметры орбиты.
Аппаратура 6 формирует измерительные сигналы для проведения космическими аппаратами глобальной навигационной системы измерений параметров их орбиты относительно низкоорбитального КА в соответствии со способом проведения межспутниковых измерений, соответствующим способу-прототипу [1, с.448-458]. При этом сигналы бортовой шкалы времени, необходимые для измерения псевдодальности и псевдоскорости, поступают с выхода аппаратуры 4 на второй вход БЦВМ 3, затем с четвертого выхода БЦВМ 3 на вход аппаратуры 6, формирующей измерительные сигналы, которые поступают с выхода аппаратуры 6 на второй вход антенны 7, которая транслирует сигналы для приема их на всех КА ГНСС, расположенных в зоне радиовидимости низкоорбитального КА.
Так как для определения параметров орбит КА ГНСС в их бортовых комплексах по измерениям псевдодальности и псевдоскорости, выполненным бортовой аппаратурой межспутниковых измерений, необходимы параметры орбиты низкоорбитального космического аппарата, относительно которого проводились межспутниковые измерения, БЦВМ 3 формирует навигационное сообщение, в соответствии со штатной структурой навигационного сообщения ГНСС [1, с.325-336]. Сформированное навигационное сообщение состоит из двух разделов - «оперативная информация» и «неоперативная информация», и раздел «оперативная информация» содержит параметры орбиты низкоорбитального космического аппарата, измеренные по телевизионным сигналам и значения бортовой шкалы времени, а раздел «неоперативная информация» - данные о состоянии всех КА ГНСС, параметрах их орбит и другие данные, предусмотренные штатной структурой навигационного сообщения КА ГНСС.
Для формирования раздела «оперативная информация» параметры орбиты низкоорбитального КА поступают с выхода аппаратуры 5 на третий вход БЦВМ 3, значения бортовой шкалы времени поступают с выхода аппаратуры 4 на второй вход БЦВМ 3. Для формирования раздела навигационного сообщения «неоперативная информация» антенна 7 принимает сигнал навигационного сообщения одного из КА ГНСС, который с выхода антенны 8 поступает на третий вход приемо-передающего устройства 2, затем со второго выхода устройства 2 на первый вход БЦВМ 3. Сигнал навигационного сообщения, сформированного БЦВМ 3, поступает с первого выхода БЦВМ 3 на второй вход приемо-передающего устройства 2, и затем с третьего выхода устройства 2 на первый вход антенны 8. Антенна 8 транслирует сигнал навигационного сообщения для приема его на всех КА ГНСС, на которых проведены межспутниковые измерения параметров орбиты относительно низкоорбитального КА.
БЦВМ 3 управляет функционированием и взаимодействием всех подсистем устройства. Измерения псевдодальности, псевдоскорости и определение (уточнение) параметров орбит КА ГНСС в бортовых комплексах КА ГНСС выполняются в соответствии со способом-прототипом, при этом на борту КА ГНСС применяется известная БАМИ, описанная в изложении способа-прототипа [1, с.448-458].
Литература
1. ГЛОНАСС. Принципы построения и функционирования./Под ред. А.И. Петрова, В.Н. Харисова. - М.: Радиотехника, 2005.
2. Телевизионная техника: Справочник / Под ред. Ю.Б.Зубарева и Г.Л.Глориозова - М.: Радио и связь, 1994.
3. Основы радиоуправления./ П.А.Агаджалов, В.А.Вейцель, С.А.Волковский и др. Под ред. В.А.Вейцеля - М.: Радио и связь, 1995.
4. Кеншин М.О. Метод учета тропосферной рефракции в фазовых измерениях спутников GPS в случае отсутствия метеоданных. - СПб.: Изд. Института теоретической астрономии, 1997.
5. ГОСТ 7845-92. Система вещательного телевидения. Основные параметры, методы измерений.
6. Семенов В.В., Смирнова Г.М., Хуторщиков В.И. Квантовая радиофизика. Квантовые стандарты частоты с оптической накачкой. - СПб.: Изд. СПбГТУ, 1999.
7. Судовые комплексы спутниковой навигации. / П.С. Волосов, Ю.С.Дубинко, Б.Г Мордвинов, В.Д. Шинков - Л.: Судостроение, 1983.
8. Иванов Н.М., Лысенко Л.Н. Баллистика и навигация космических аппаратов. - М.: Дрофа, 2004.
Изобретение относится к измерительной технике и может использоваться для эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы. Технический результат - повышение точности измерений. Для этого на орбиту выводят низкоорбитальный космический аппарат (КА), на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени, аппаратуру определения параметров орбиты по сигналам эфирного телевидения, бортовую аппаратуру межспутниковых измерений. При орбитальном полете КА синхронизируют его бортовую шкалу времени с системной шкалой времени глобальной навигационной спутниковой системы. Определяют параметры орбиты КА по телевизионным сигналам. Передают навигационное сообщение, содержащее параметры орбиты КА, проводят межспутниковые измерения, в ходе которых измеряют параметры движения космических аппаратов навигационной системы относительно низкоорбитального КА. По межспутниковым измерениям и параметрам орбиты низкоорбитального КА в бортовых комплексах управления космических аппаратов навигационной системы определят параметры их орбит и эфемериды. 1 ил.
Способ эфемеридного обеспечения процесса управления космическими аппаратами глобальной навигационной спутниковой системы, в котором осуществляют синхронизацию бортовой шкалы времени каждого космического аппарата с системной шкалой времени, измеряют псевдодальности и псевдоскорости движения КА с помощью бортовой аппаратуры межспутниковых измерений, отличающийся тем, что на орбиту с прямым или обратным наклонением выводят низкоорбитальный космический аппарат, на котором размещают аппаратуру синхронизации бортовой шкалы времени с системной шкалой времени глобальной навигационной спутниковой системы, аппаратуру измерения текущих навигационных параметров движения по сигналам эфирного телевидения наземных стационарных телевизионных радиостанций и определения по ним параметров орбиты низкоорбитального космического аппарата, бортовую аппаратуру межспутниковых измерений, при орбитальном полете синхронизируют бортовую шкалу времени низкоорбитального космического аппарата с системной шкалой времени глобальной навигационной спутниковой системы, определяют параметры орбиты низкоорбитального космического аппарата по сигналам телевизионных радиостанций, проводят межспутниковые измерения параметров движения космических аппаратов навигационной системы относительно низкоорбитального космического аппарата, на борту низкоорбитального космического аппарата формируют навигационное сообщение, содержащее параметры его орбиты, измеренные по телевизионным сигналам, которое транслируют и принимают на борту космических аппаратов навигационной системы, в бортовых комплексах управления космических аппаратов навигационной системы определяют параметры их орбит и эфемериды по межспутниковым измерениям и параметрам орбиты низкоорбитального космического аппарата.
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| / Под ред | |||
| А.И.ПЕТРОВА, В.Н.ХАРИСОВА | |||
| - М.: Радиотехника, 2005 | |||
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2181927C1 |
| Бортовые устройства спутниковой радионавигации | |||
| / Под ред | |||
| B.C.ШЕБШАЕВИЧА | |||
| - М.: Радио и связь, 1988, с.200 | |||
| СИСТЕМА КОСМИЧЕСКОЙ ОПТИЧЕСКОЙ СВЯЗИ МЕЖДУ КООПЕРИРУЕМЫМ ОБЪЕКТОМ И ОБЪЕКТОМ-КОРРЕСПОНДЕНТОМ | 2004 |
|
RU2275743C2 |
| СПОСОБ АВТОНОМНОГО СНИЖЕНИЯ ПОРОГОВ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ НЕСУЩИХ СИГНАЛОВ, ПРИНИМАЕМЫХ НА ОРБИТЕ | 1997 |
|
RU2187127C2 |

