Изобретение относится к области бортового информационно-навигационного комплекса (БИНК) космических аппаратов (КА) и предназначено для формирования и излучения навигационных радиосигналов системы ГЛОНАСС, формирования, излучения, приема данных и измерений по межспутниковой радиолинии (MPЛ), а также, для обеспечения автономного функционирования космической спутниковой навигационной группировки ГЛОНАСС.
Из уровня техники известна аппаратура бортового источника навигационных радиосигналов (БИНРС), опубликованная в издании «ГЛОНАСС принципы построения и функционирования», 2010 год, под редакцией А.И. Перова, В.Н. Харисова, стр. 418-424 и предназначенная для формирования и излучения высокостабильных навигационных радиосигналов в двух частотных диапазонах - L1, L2. В состав БИНРС входят: формирователь навигационного кадра (ФНК), формирователь навигационного сигнала (ФНС), контроллер магистрали мультиплексного канала обмена (МКО), синтезатор несущих частот диапазонов L1 и L2, четырехканальный усилитель мощности диапазона L1, двухканальный усилитель мощности диапазона L2, 12-элементная антенная система (активная фазированная антенная решетка (АФАР)). Взаимодействие БИНРС с другими бортовыми системами осуществляется по стандартному мультиплексному каналу обмена (МКО).
Недостатками ближайшего аналога являются: недостаточное количество навигационных частотных диапазонов (два сигнала с частотным разделением), не осуществлено синхронное формирование и излучение навигационных радиосигналов и радиосигналов МРЛ; ограниченные возможности по автономной реконфигурации и диагностике комплекса при возникновении аномальных ситуаций.
Решаемые заявленным изобретением задачи:
- формирование и излучение навигационных радиосигналов;
- передача в составе навигационных радиосигналов навигационной информации, специальных информационных сообщений;
- формирование, передача, прием данных и измерения по межспутниковой радиолинии;
- автономная реконфигурация приборов БИНК при аномальных ситуациях.
Технический результат заключается в осуществлении синхронного формирования и излучения навигационных и межспутниковых сигналов.
Технический результат достигается тем, что бортовой информационно-навигационный комплекс состоит из блока цифрового управления (БЦУ), на первый вход которого, являющийся первым входом БИНК, подаются сигналы бортовой шкалы времени (БИТВ) и сигнал 1 Гц от бортового синхронизирующего устройства (БСУ), на второй вход БЦУ, являющийся вторым входом БИНК, подается бортовая сеть (БС), на третий вход БЦУ, который является третьим входом БИНК, подаются аппаратные команды управления (КУ) от бортового комплекса управления (БКУ), на выход БЦУ выдается аппаратная телеметрическая информация (ТМИ), при этом БЦУ подключено через мультиплексный канал обмена (МКО) цифровой информацией с бортовым центральным вычислительным комплексом (БЦВК) и по внутренней информационной магистрали соединено с навигационным подкомплексом (НПК), подкомплексом межспутниковой радиолинии (ПМРЛ), маломощным коммутатором бортовой сети (КБС-М) и силовым коммутатором бортовой сети (КБС-С), а по мультиплексному каналу обмена с бортовым центральным вычислительным комплексом, при этом выход БЦУ соединен с бортовым комплексом управления; блока формирования синхронизирующих сигналов (БФСС), на первый вход которого, являющийся четвертым входом БИНК, подаются синхросигналы, с первого и второго выхода которого синхросигналы подаются, соответственно, на первые входы НПК и ПМРЛ, навигационный подкомплекс (НПК), в состав которого входят: формирователь навигационного радиосигнала диапазона L1 (ФНРС L1), формирователь навигационного радиосигнала диапазона L2 (ФНРС L2), формирователь навигационного радиосигнала диапазона L3 (ФНРС L3), радиопередающее устройство диапазона L1 (РПДУ L1), радиопередающее устройство диапазона L2 (РПДУ L2), радиопередающее устройство диапазона L3 (РПДУ L3), антенно-фидерное устройство навигационных сигналов (АФУ НС) и блок логики и коммутации навигационного подкомплекса (БЛИК-НПК), на вход которого, являющийся входом НПК, подаются синхросигналы, с первого, второго и третьего выхода которого синхросигналы подаются на первые входы ФНРС L1, ФНРС L2 и ФНРС L3, с выходов которых сформированный навигационный сигнал подается соответственно на первые входы РПДУ L1, РПДУ L2 и РПДУ L3, выходы которых подключены, соответственно, к первому, второму и третьему входам АФУ НС, при этом БЛИК-НПК соединен по внутренней информационной магистрали с ФНРС L1, ФНРС L2 и ФНРС L3, подкомплекса межспутниковых радиолиний (ПМРЛ), в состав которого входят: приемо-передающий модуль межспутниковой радиолинии (НИМ МРЛ), радиопередающее устройство диапазона S (РПДУ S), передающее антенно-фидерное устройство (АФУ ПРД), приемное антенно-фидерное устройство (АФУ ПРМ), малошумящий усилитель (МШУ) и блок логики и коммутации межспутниковой радиолинии (БЛИК-МРЛ), на вход которого, являющийся входом ПМРЛ, подаются синхросигналы со второго входа БФСС, с выхода БЛИК МРЛ синхросигналы подаются на вход НИМ МРЛ, с выхода которого сформированный радиосигнал подается на первый вход РПДУ S, выход которого подключен к входу АФУ ПРД, при этом, выход АФУ ПРМ подключен к первому входу МШУ, выход которого подключен к третьему входу НИМ МРЛ, при этом БЛИК-МРЛ соединен с НИМ МРЛ по внутренней информационной магистрали; коммутатора бортовой сети маломощного КБС-М, к первому входу которого подключена БС, при этом первый, второй, третий, четвертый, пятый и шестой выходы КБС-М подключены, соответственно, к вторым входам ФНРС L1, ФНРС L2 и ФНРС L3, ППМ МРЛ, МШУ и БФСС, коммутатора бортовой сети силового КБС-С, к входу которого подключена БСКА, при этом первый, второй, третий и четвертый выходы КБС-С подключены, соответственно, к вторым входам РПДУ L1, РПДУ L2 и РПДУ L3 и РПДУ S.
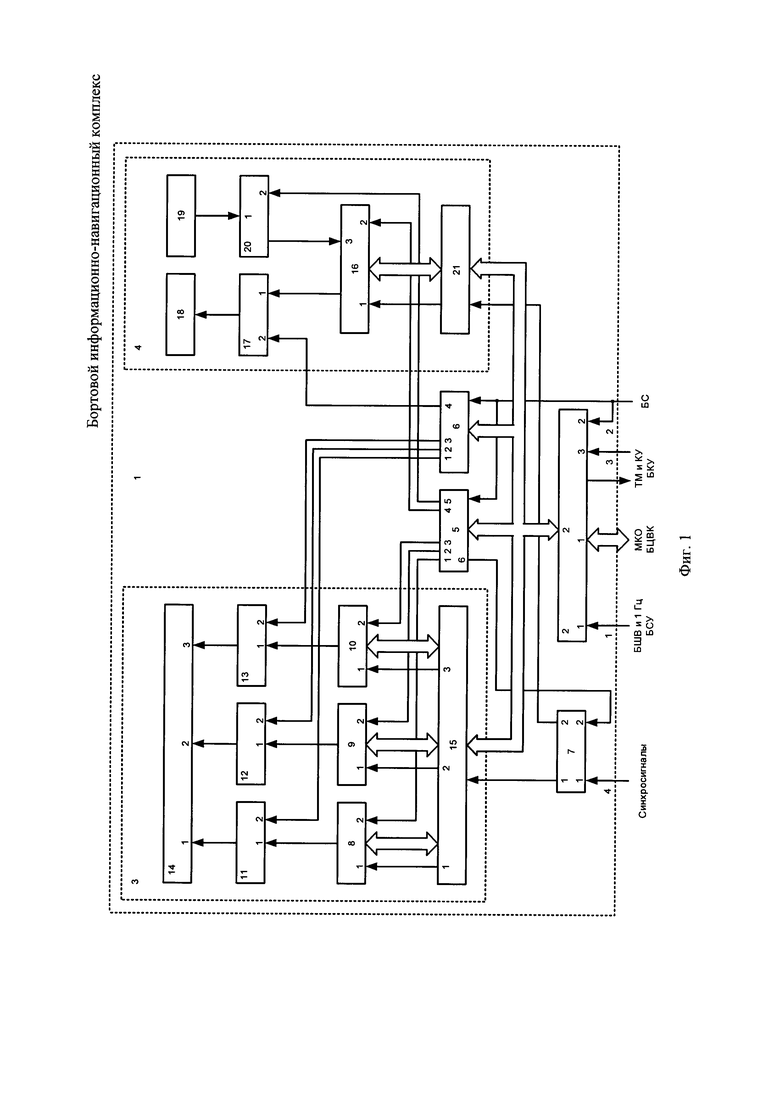
Суть заявляемого изобретения поясняется чертежом, где на фиг. 1 схематически изображены:
1. Бортовой информационно-навигационный комплекс (БИНК);
2. Блок цифрового управления (БЦУ);
3. Навигационный подкомплекс (НПК);
4. Подкомплекс межспутниковой радиолинии (ПМРЛ);
5. Маломощный коммутатор бортовой сети (КБС-М);
6. Силовой коммутатор бортовой сети (КБС-С);
7. Блок формирования синхросигналов (БФСС);
8. Формирователь радиосигнала диапазона L1 (ФНРС L1);
9. Формирователь радиосигнала диапазона L2 (ФНРС L2);
10. Формирователь радиосигнала диапазона L3 (ФНРС L3);
11. Радиопередающее устройство диапазона L1 (РПДУ L1);
12. Радиопередающее устройство диапазона L2 (РПДУ L2);
13. Радиопередающее устройство диапазона L3 (РПДУ L3);
14. Антенно-фидерное устройство навигационных сигналов (АФУ НС);
15. Блок логики и коммутации навигационного подкомплекса (БЛИК- НПК);
16. Приемо-передающий модуль межспутниковой радиолинии (ППМ МРЛ);
17. Радиопередающее устройство диапазона S (РПДУ S);
18. Передающее антенно-фидерное устройство (АФУ ПРД);
19. Приемное антенно-фидерное устройство (АФУ ПРМ);
20. Малошумящий усилитель (МШУ);
21. Блок логики и коммутации межспутниковой радиолинии (БЛИК- МРЛ);
Функциональное назначение и принцип работы приборов заявленного устройства БИНК.
Функционально БИНК (1) делится на блок цифрового управления БЦУ (2), навигационный подкомплекс НПК (3), подкомплекс межспутниковой радиолинии ПМРЛ (4), маломощный коммутатор бортовой сети КБС-М (5), силовой коммутатор бортовой сети КБС-С (6) и блок формирования синхросигналов БФСС (7).
Для передачи командной, телеметрической и цифровой информации между блоком цифрового управления БЦУ (2) навигационным подкомплексом НПК (3), подкомплексом межспутниковой радиолинии ПМРЛ (4), маломощным коммутатором бортовой сети КБС-М (5) и силовым коммутатором бортовой сети КБС-С (6) используется внутренняя информационная магистраль ВИМ.
Блок цифрового управления БЦУ (2) предназначен для:
- обмена управляющей, телеметрической и цифровой информацией по мультиплексному каналу обмена (МКО) с бортовым цифровым вычислительным комплексом БЦВК КА в соответствии с «Протоколом логического и информационного взаимодействия аппаратуры БИНК с БЦВК»;
- приема сигналов БИТВ и сигнала 1 Гц, которые представляют собой, соответственно, 32-х разрядный код времени и импульсный сигнал 1 Гц, формируемые БСУ КА;
- контроля достоверности (монотонности) кодов БШВ БСУ КА и обеспечения автономной генерации кодов БШВ при недостоверных кодах БШВ БСУ;
- проведения плановой коррекции БШВ ГЛОНАСС;
- обмена по ВИМ управляющей, телеметрической и цифровой информацией с НПК (3), ПМРЛ (4), КБС-М (5) и КБС-С (6) в соответствии с «Протоколом логического и информационного взаимодействия по внутренней информационной магистрали»;
- накопления, хранения информации и передачи на БЦВК, принятой по МРЛ от ППМ МРЛ (16) за один 5-ти секундный сеанс приема;
- выполнения контроля и реконфигурации БИНК (1) при автономном функционировании в составе космической спутниковой навигационной группировки ГЛОНАСС.
На первый вход БЦУ приходит сигнал БШВ - 32-х разрядный код времени, который выдается из БСУ, в виде однополярного импульсного самотактирующегося кода единиц (К1) и нулей (КО) с частотой следования импульсов 100 Гц и импульсный сигнал 1 Гц, на второй вход БЦУ подается БС, на третий вход БЦУ подаются аппаратные команды управления БКУ, на выход БЦУ выдается аппаратная телеметрическая информация ТМИ БИНК, при этом БЦУ использует МКО для обмена цифровой информацией с БЦВК КА в соответствии с «Протоколом логического и информационного взаимодействия аппаратуры БИНК с БЦВК» и ВИМ для обмена командной, телеметрической и цифровой информацией с НПК (3), ПМРЛ (4), КБС-М (5) и КБС-С (6) в соответствии с «Протоколом логического и информационного взаимодействия по внутренней информационной магистрали».
Навигационный подкомплекс НПК (3) предназначен для формирования цифровой информации, формирования и передачи навигационных радиосигналов. В состав НПК входят: ФНРС L1 (8), ФНРС L2 (9), ФНРС L3 (10), РПДУ LI (11), РПДУ L2 (12), РПДУ L3 (13), АФУ НС (14) и БЛИК-НПК (15). На вход БЛИК-НПК (15) подаются синхросигналы 5 МГц и 1 Гц и транслируются на первый, второй и третий выходы для подачи, соответственно, на первые входы ФНРС L1 (8), ФНРС L2 (9) и ФНРС L3 (10). На вход/выход БЛИК-НПК (15) подключена ВИМ, которая ретранслируется на вход/выходы для подключения, соответственно, к вход/выходам ФНРС L1 (8), ФНРС L2 (9) и ФНРС L3 (10), с выхода которых сформированный навигационный радиосигнал подается, соответственно, на первые входы РПДУ L1 (11), РИДУ L2 (12) и РПДУ L3 (13), выходы которых подключены, соответственно, к первому, второму и третьему входам АФУ НС (14).
Подкомплекс межспутниковой радиолинии ПМРЛ (4) предназначен для формирования и приема цифровой информации межспутниковой радиолинии, формирования, передачи и приема радиосигналов межспутниковой радиолинии и обеспечения синхронной работы ППМ МРЛ (16) по циклограмме (20-ти секундные циклы приема-передачи сигналов МРЛ), в соответствии с заданными режимами работы и с привязкой к принятым и декодированным сигналам БШВ БСУ.
В состав ПМРЛ 4) входят: ППМ МРЛ (16), РПДУ S (17), АФУ ПРД (18), АФУ ПРМ (19), МШУ (20) и БЛИК-МРЛ (21). На вход БЛИК-МРЛ (21) подаются синхросигналы 5 МГц и 1 Гц и транслируются на выход для подачи на первый вход ППМ МРЛ (16). На вход/выход БЛИК-МРЛ (21) подключена ВИМ, которая ретранслируется на вход/выход для подключения к вход/выходу ППМ МРЛ (16), с выхода которого сформированный радиосигнал подается на первый вход РПДУ S (17), выход которого подключен к входу АФУ ПРД (18), при этом, выход АФУ ПРМ (19) подключен к первому входу МШУ (20), выход которого подключен к третьему входу ППМ МРЛ (16).
Маломощный коммутатор бортовой сети КБС-М (5) предназначен для преобразования управляющей информации, поступающей по ВИМ от БЦУ (2) в силовые потенциальные команды, которые с первого, второго, третьего, четвертого, пятого и шестого выходов подключены, соответственно, к вторым входам ФНРС L1 (8), ФНРС L2 (9), ФНРС L3 (10), ППМ МРЛ (16), МШУ (20) и БФСС (7), а также, для сбора телеметрической информации с ее последующей трансляцией БЦУ (2) по ВИМ.
Силовой коммутатор бортовой сети КБС-С (7) предназначен для преобразования управляющей информации, поступающей по ВИМ от БЦУ (2) в силовые потенциальные команды, которые с первого, второго, третьего и четвертого выходов подключены, соответственно, ко вторым входам РПДУ L1 (11), РПДУ L2 (12), РПДУ L3 (13) и РПДУ S (17) а также, для сбора телеметрической информации с ее последующей трансляцией БЦУ (2) по ВИМ.
Блок формирования синхросигналов БФСС (7) предназначен для приема на первый вход синхросигналов 5 МГц и 1 Гц и распределения на первый и второй выходы для подключения, соответственно, ко входам БЛИК-НПК (15) и БЛИК-МРЛ (21).
Формирователь навигационного радиосигнала диапазона L1 ФНРС L1 (8) обеспечивает формирование цифровой информации, формирование и излучение навигационного радиосигнала в частотном диапазоне L Сформирование телеметрической информации информационное взаимодействие с БЦУ (2) по ВИМ.
Формирователь навигационного радиосигнала диапазона L2 ФНРС L2 (9) обеспечивает формирование цифровой информации, формирование и излучение навигационного радиосигнала в частотном диапазоне L2, формирование телеметрической информации и информационное взаимодействие с БЦУ (2) по ВИМ.
Формирователь навигационного радиосигнала диапазона L3 ФНРС L3(10) обеспечивает формирование цифровой информации, формирование и излучение навигационного радиосигнала в частотном диапазоне L3, формирование телеметрической информации и информационное взаимодействие с БЦУ (2) по ВИМ.
Радиопередающие устройства РПДУ L1 (11), РПДУ L2 (12), РПДУ L3 (13) предназначены для усиления сформированных навигационных радиосигналов, с последующей передачей их в АФУ НС (14) для излучения.
Блок логики и коммутации навигационного подкомплекса БЛИК-НПК (15) выполняет роль кроссоединительного устройства и предназначен для распределения синхросигналов, поступающих от БФСС (7) на ФНРС L1 (8), ФНРС L2 (9), ФНРС L3 (10) и трансляции управляющей, телеметрической и цифровой информации между БЦУ (2) и ФНРС L1 (8), ФНРС L2 (9), ФНРС L3 (10), передаваемой по ВИМ.
Приемо-передающий модуль межспутниковой радиолинии ППМ МРЛ(16) обеспечивает:
- формирование и излучение радиосигнала межспутниковой радиолинии в частотном диапазоне S;
- синхронную работу приемо-передающих устройств по циклограмме (20-ти секундные циклы приема-передачи сигналов МРЛ), в соответствии с заданными режимами работы и с привязкой к синхросигналам и БШВ;
- декодирование, накопление и хранение цифровой информации, принятой по МРЛ;
- формирование телеметрической информации и информационное взаимодействие с БЦУ (2) по ВИМ.
Блок логики и коммутации межспутниковой радиолинии БЛИК-МРЛ (21) выполняет роль кроссоединительного устройства и предназначен для распределения синхросигналов, поступающих от БФСС (7) на ППМ МРЛ (16) и трансляции управляющей, телеметрической и цифровой информации между БЦУ (2) и ППМ МРЛ (16), передаваемой по ВИМ.
Радиопередающее устройство диапазона 8РПДУ S (17) предназначено для усиления, сформированного радиосигнала межспутниковой радиолинии, с последующей передачей в АФУ ПРД (18) для излучения.
Приемное антенно-фидерное устройство АФУ ПРМ (19) предназначено для многоканального приема радиосигналов межспутниковой радиолинии от нескольких КА.
Малошумящий усилитель МШУ (20) предназначен для усиления и предварительной фильтрации радиосигналов межспутниковой радиолинии с последующей трансляцией на ППМ МРЛ (16).
Таким образом, использование заявленного устройства на борту навигационных КА ГЛОНАСС позволяет обеспечить решение поставленных задач с достижением заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бортовой информационно-навигационный комплекс | 2019 |
|
RU2706835C1 |
| БОРТОВАЯ АППАРАТУРА МЕЖСПУТНИКОВЫХ ИЗМЕРЕНИЙ (БАМИ) | 2012 |
|
RU2504079C1 |
| Способ формирования группового навигационного сигнала ГЛОНАСС | 2017 |
|
RU2660126C1 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ С КОМПЕНСАЦИЕЙ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОГО ПРИЕМНИКА | 2015 |
|
RU2638411C2 |
| Система управления полетом космического аппарата с применением в качестве ретрансляторов низкоорбитальных спутников, связанных между собой межспутниковыми линиями связи | 2019 |
|
RU2713293C1 |
| РАДИОПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2566322C1 |
| Способ и устройство для нелинейного уплотнения навигационного сигнала ГЛОНАСС | 2018 |
|
RU2686660C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ НАВИГАЦИОННЫХ СПУТНИКОВ | 2015 |
|
RU2587666C1 |
Изобретение относится к области бортового информационно-навигационного оборудования космических аппаратов и предназначено для формирования и излучения навигационных радиосигналов системы ГЛОНАСС, формирования, излучения, приема данных и измерений по межспутниковой радиолинии, а также для обеспечения автономного функционирования космической спутниковой навигационной группировки ГЛОНАСС. Бортовой информационно-навигационный комплекс включает блок цифрового управления, блок формирования синхронизирующих сигналов, навигационный подкомплекс, подкомплекс межспутниковых радиолиний, маломощный коммутатор бортовой сети и силовой коммутатор бортовой сети. При этом навигационный подкомплекс включает в свой состав формирователи навигационного радиосигнала диапазонов L1, L2 и L3, радиопередающие устройства диапазона L1, L2 и L3, антенно-фидерное устройство навигационных сигналов и блок логики и коммутации навигационного подкомплекса. Подкомплекс межспутниковых радиолиний содержит приемопередающий модуль межспутниковой радиолинии, радиопередающее устройство диапазона S, передающее антенно-фидерное устройство, приемное антенно-фидерное устройство, малошумящий усилитель и блок логики и коммутации межспутниковой радиолинии, маломощный и силовой коммутаторы бортовой сети. Технический результат заключается в осуществлении синхронного формирования и излучения навигационных и межспутниковых сигналов. 1 ил.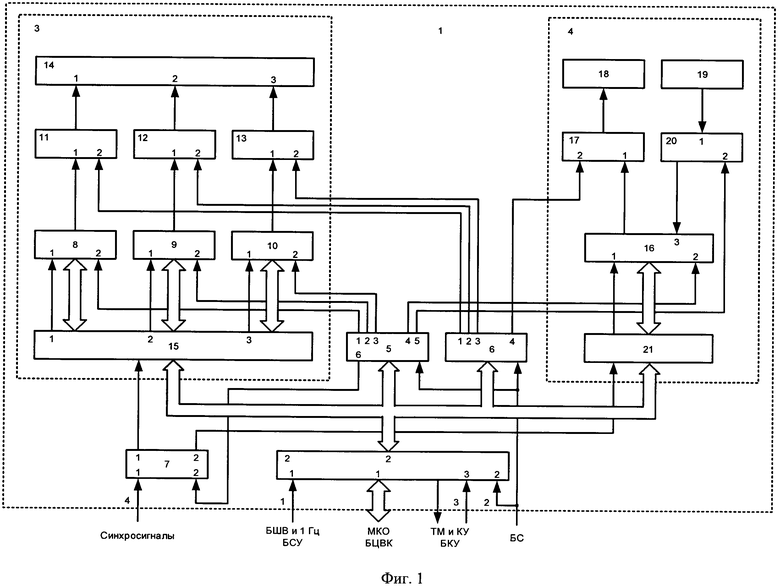
Бортовой информационно-навигационный комплекс, характеризующийся тем, что включает блок цифрового управления (БЦУ), блок формирования синхронизирующих сигналов (БФСС), навигационный подкомплекс (НПК) в составе формирователя навигационного радиосигнала диапазона L1 (ФНРС L1), формирователя навигационного радиосигнала диапазона L2 (ФНРС L2), формирователя навигационного радиосигнала диапазона L3 (ФНРС L3), радиопередающего устройства диапазона L1 (РПДУ L1), радиопередающего устройства диапазона L2 (РПДУ L2), радиопередающего устройства диапазона L3 (РПДУ L3), антенно-фидерного устройства навигационных сигналов (АФУ НС) и блока логики и коммутации навигационного подкомплекса (БЛИК-НПК), подкомплекс межспутниковых радиолиний (ПМРЛ) в составе приемо-передающего модуля межспутниковой радиолинии (ППМ МРЛ), радиопередающего устройства диапазона S (РПДУ S), передающего антенно-фидерного устройства (АФУ ПРД), приемного антенно-фидерного устройства (АФУ ПРМ), малошумящего усилителя (МШУ) и блока логики и коммутации межспутниковой радиолинии (БЛИК-МРЛ), маломощный коммутатор бортовой сети (КБС-М), силовой коммутатор бортовой сети (КБС-С), при этом на первый вход БЦУ подаются сигналы бортовой шкалы времени и сигнал 1 Гц от бортового синхронизирующего устройства, на второй вход БЦУ подается бортовая сеть космического аппарата, на третий вход БЦУ подаются аппаратные команды управления от бортового комплекса управления, причем БЦУ по внутренней информационной магистрали соединено с навигационным подкомплексом (НПК), подкомплексом межспутниковой радиолинии (ПМРЛ), маломощным коммутатором бортовой сети (КБС-М) и силовым коммутатором бортовой сети (КБС-С), а также по мультиплексному каналу обмена с бортовым центральным вычислительным комплексом, при этом выход БЦУ соединен с бортовым комплексом управления; на первый вход БФСС подаются синхросигналы, которые с первого и второго выходов БФСС подаются соответственно на входы БЛИК-НПК и БЛИК-ПМРЛ; синхросигналы с первого, второго и третьего выходов БЛИК-НПК подаются соответственно на первые входы ФНРС L1, ФНРС L2 и ФНРС L3, а выходы ФНРС L1, ФНРС L2 и ФНРС L3 соединены соответственно с первыми входами РПДУ L1, РПДУ L2 и РПДУ L3, выходы которых подключены соответственно к первому, второму и третьему входам АФУ НС, причем БЛИК-НПК соединен по внутренней информационной магистрали с ФНРС L1, ФНРС L2 и ФНРС L3; синхросигналы с выхода БЛИК-МРЛ подаются на первый вход ППМ МРЛ, выход ППМ МРЛ соединен с первым входом РПДУ S, выход которого подключен к входу АФУ ПРД, выход АФУ ПРМ подключен к первому входу МШУ, выход которого подключен к третьему входу ППМ МРЛ, при этом БЛИК-МРЛ соединен с ППМ МРЛ по внутренней информационной магистрали; к входу КБС-М подключена бортовая сеть космического аппарата, при этом первый, второй, третий, четвертый, пятый и шестой выходы КБС-М подключены соответственно к вторым входам ФНРС L1, ФНРС L2 и ФНРС L3, ППМ МРЛ, МШУ и БФСС; к входу КБС-С подключена бортовая сеть космического аппарата, при этом первый, второй, третий и четвертый выходы КБС-С подключены соответственно к вторым входам РПДУ L1, РПДУ L2, РПДУ L3 и РПДУ S.
| БОРТОВАЯ АППАРАТУРА МЕЖСПУТНИКОВЫХ ИЗМЕРЕНИЙ (БАМИ) | 2012 |
|
RU2504079C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ НАВИГАЦИОННОЙ И ДОПОЛНИТЕЛЬНОЙ ИНФОРМАЦИЙ | 1996 |
|
RU2114442C1 |
| Коротковолновая антенна бегущей волны | 1956 |
|
SU105098A1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| WO 2016097832 A1, 23.06.2016. | |||

