Изобретение относится к области стекольной промышленности и может быть использовано для разделения потока объектов, таких, например, как стеклоизделия, по крайней мере, на два потока, и способу использования системы.
Известно использование устройств для перемещения объектов с помощью, например, кулачков и плунжеров, которые толкают объект сбоку так, что он перемещается из потока в сторону.
Однако при использовании механических толкателей для перемещения объектов с помощью, например, кулачков, плунжеров и возвратно-поступательных исполнительных механизмов, которые толкают объект сбоку, происходит перемещение объекта из потока в сторону, что является сложным, т.к. перемещение объекта в сторону требует синхронизации скоростей исполнительных механизмов и транспортера, на котором расположены объекты - стеклоизделия. Возврат исполнительного механизма в исходную точку требует сравнительно много времени, примерно равного времени перемещения объекта в сторону, что снижает пропускную способность транспортера, даже если обеспечить вертикальное перемещение механического толкателя при возврате в исходное положение. Контактирующая поверхность механического толкателя с объектом - стеклоизделием имеет ограниченную контактную площадь, поэтому деление разных по высоте и конфигурации объектов стеклотары в одном потоке усложняет конструкцию исполнительного механизма и сокращает скорость транспортера.
Известна конструкция устройства перемещения стеклоизделий, свидетельство РФ на полезную модель №24461, содержащее исполнительный механизм, снабженный первым приводом, на штоке которого закреплен толкатель, установленный с возможностью возвратно-поступательного перемещения, перпендикулярно направлению движения первого конвейера в направлении движения второго конвейера, средство поддерживания стеклоизделий, закрепленное на штоке второго привода. Второй привод закреплен на штоке первого привода, а средство поддерживания стеклоизделий выполнено в виде щитка, закрепленного на штоке второго привода приблизительно параллельно толкателю и установленного с возможностью возвратно-поступательного перемещения, перпендикулярно направлениям движений первого и второго конвейеров. Исполнительный механизм устройства для перемещения стеклоизделий, преимущественно бутылок, с одного конвейера на другой, содержащий толкатель, установленный с возможностью возвратно-поступательного перемещения под действием первого привода, средство поддерживания стеклоизделий, смонтированное с возможностью вертикального перемещения под действием второго привода, отличающийся тем, что второй привод закреплен на штоке первого привода, а средство поддерживания стеклоизделий выполнено в виде щитка, закрепленного на кронштейне на штоке второго привода приблизительно параллельно упомянутому толкателю
Недостатком известной конструкции является использование механического исполнительного механизма - толкателя, приводов, для эффективной работы которого необходима синхронизации скоростей исполнительных механизмов и транспортера, что усложняет конструкцию устройства перемещения.
Известно устройство для разделения потока объектов, патент РФ №2390488 от 20.06.2007, которое содержит транспортер, на который указанные объекты могут поступать вдоль некоторой линии в транспортировочном направлении, и по меньшей мере один толкатель, установленный с возможностью перемещения объектов на транспортере относительно других объектов на нем и собственного перемещения в направлении под углом меньше 90° к транспортировочному направлению. В различных вариантах изобретения для обнаружения объекта используют датчик, который вызывает движение толкателя, или несколько транспортеров, которые могут двигаться с различными скоростями так, что один объект на одном транспортере догоняет объект на другом транспортере, и в конце транспортеров два объекта расположены рядом, или толкатель выполнен с возможностью складывания назад, а несколько толкателей могут быть приведены в движение различными средствами.
Недостатком конструкции является также использование механических исполнительных механизмов - толкателей, которые усложняют конструкцию и требуют дополнительной синхронизации с транспортером.
Задачей изобретения является упрощение процесса разделения потока объектов, таких, например, как стеклоизделия, путем использования для перемещения объектов направленной струи воздуха, повышение производительности работы транспортной линии.
Поставленная задача достигается тем, что система для разделения потока объектов, таких, например, как стеклоизделия, по меньшей мере, на два потока, содержит транспортер, по которому указанные объекты поступают вдоль линии в транспортировочном направлении. На приводе транспортера установлен датчик угловых перемещений. Перед зоной разделения потока установлено не менее одного оптического датчика, соединенного с контроллером. В зоне разделения потока установлен пневматический делитель, соединенный через электроклапан, ресивер и блок подготовки воздуха с воздушной магистралью. Напротив пневматического делителя установлена эжекционная пластина. Оптические датчики определяют наличие объекта и классифицируют объект по признаку высоты либо по признаку ширины. Дополнительно установлена видеокамера сравнения объекта с образцом, который заранее, при процедуре настройки, записан в память видеокамеры. Контроллер является логически программируемым.
Поставленная задача достигается также тем, что используют способ разделения потока объектов, таких, например, как стеклоизделия, по меньшей мере, на два потока, согласно которому объекты транспортируют по некоторой линии в транспортировочном направлении. Оптический датчик обнаруживает объект и подает сигнал на контроллер. Контроллер по сигналам датчика угловых перемещений рассчитывает пройденный объектом путь, и как только объект пройдет путь, равный либо больший заданного, контроллер выдает сигнал на электроклапан. Электроклапан включает подачу воздуха на пневматический делитель. В пневматическом делителе создается воздушная струя, примерно перпендикулярная транспортировочному направлению движения объектов, которая перемещает объект в сторону на некоторое расстояние. Через заданное время, соответствующее времени перемещения объекта в сторону, контроллер снимает сигнал с электроклапана, тем самым прекращая подачу воздуха на пневматический делитель.
На фигуре 1 показан способ разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов одного вида, в заданной пропорции, например, перемещать каждый второй объект.
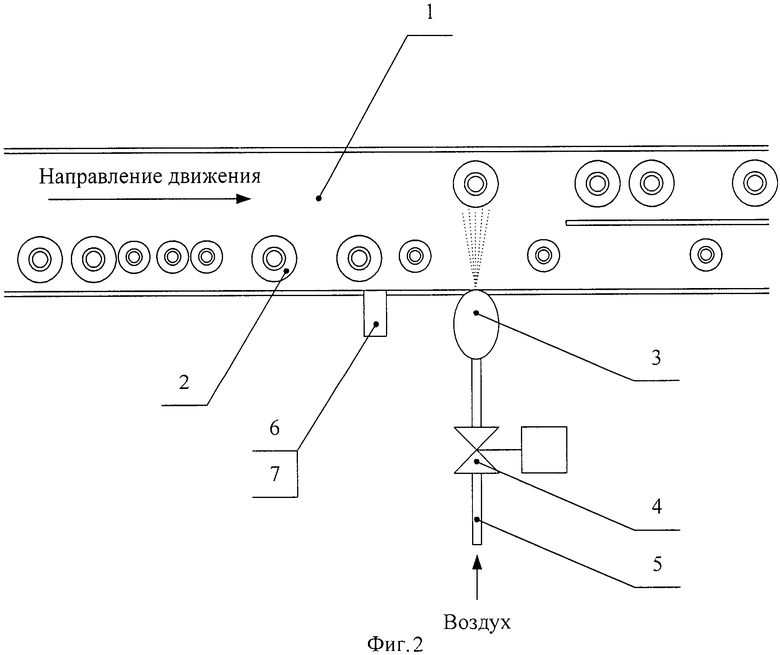
На фигуре 2 показан способ разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по признаку высоты либо по признаку ширины.
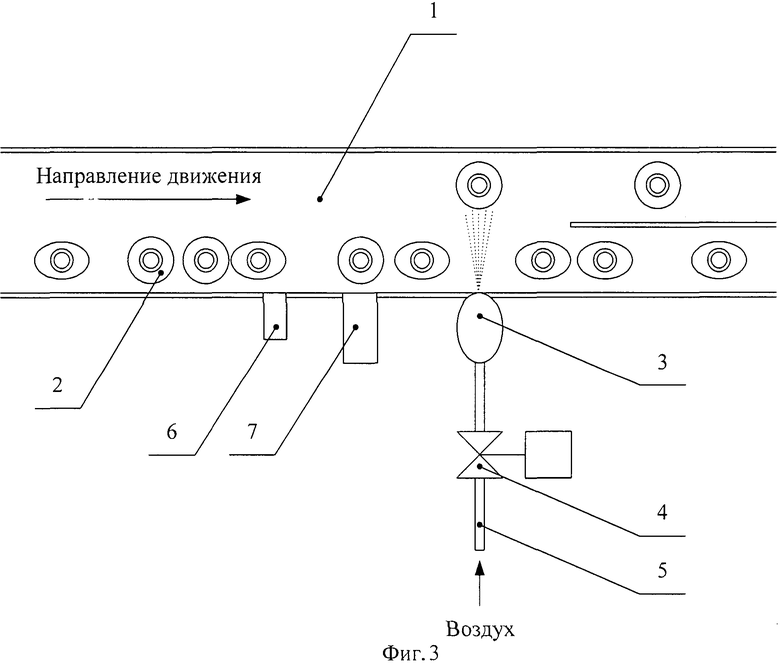
На фигуре 3 показан способ разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по образцу.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов одного вида, в заданной пропорции (фигура 1) состоит из транспортера 1, объектов 2, пневматического делителя 3, электроклапана 4, воздушной магистрали 5, оптического датчика 6.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов одного вида, в заданной пропорции работает следующим образом.
По транспортеру 1, в направлении движения, движется основной поток объектов 2, таких, например, как стеклоизделия. Оптический датчик 6 фиксирует объект и подает сигнал в контроллер (на фигуре 1 не показан). Контроллер, по сигналам датчика угловых перемещений, отслеживает положение объекта и присваивает каждому объекту номер. Если, например, оператор задал такую пропорцию, при которой необходимо перемещать каждый второй объект, то как только объект с номером 2, 4, 6 и т.д. дойдет до зоны работы пневматического делителя 3, контроллер выдает сигнал на электроклапан 4. Электроклапан 4 подает воздух из воздушной магистрали 5 на пневматический делитель 3, где создается воздушная струя, которая перемещает объект в сторону, на некоторое расстояние, тем самым создавая второй поток объектов. Если в зоне работы пневматического делителя 3 находится объект с номером 1, 3, 5 и т.д., то контроллер не выдает сигнал на электроклапан, и объекты с данными номерами не меняют своего положения на транспортере. Таким образом, после зоны работы пневматического делителя основной поток объектов делится на два параллельных, пропорциональных потока. Пропорция деления может быть задана любая, например, перемещать каждый второй объект, каждый пятый и т.д. Все эти операции выполняются для каждого объекта.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по признаку высоты либо по признаку ширины (фигура 2) состоит из транспортера 1, объектов 2, пневматического делителя 3, электроклапана 4, воздушной магистрали 5, оптических датчиков 6 и 7, расположенных друг под другом на некотором расстоянии.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по признаку высоты либо по признаку ширины работает следующим образом.
По транспортеру 1, в направлении движения, движется основной поток объектов 2, таких, например, как стеклоизделия. Оптические датчики 6 и 7 фиксируют объект и подают сигналы в контроллер (на фигуре 2 не показан). Контроллер по состоянию сигналов оптических датчиков 6 и 7 присваивает объекту свойство «низкий» или «высокий», «широкий» или «узкий» и отслеживает положение объекта. Как только объект дойдет до зоны работы пневматического делителя 3, контроллер исходя из свойств объекта определяет необходимость перемещения объекта, например оператор задал задание - перемещать все высокие объекты. Если объект, находящийся в зоне работы пневматического делителя, имеет свойство «высокий», то контроллер выдает сигнал на электроклапан 4. Электроклапан 4 подает воздух из воздушной магистрали 5 на пневматический делитель 3, где создается воздушная струя, которая перемещает объект в сторону, на некоторое расстояние, тем самым создавая второй поток объектов. Если в зоне работы пневматического делителя 3 находится объект со свойством «низкий», то контроллер не выдает сигнал на электроклапан, и объекты с данным свойством не меняют своего положения на транспортере. Таким образом, после зоны работы пневматического делителя основной поток объектов делится на два параллельных потока: «высокие» и «низкие». Подобным образом можно разделить поток объектов на два параллельных потока: «широкие» и «узкие». Все эти операции выполняются для каждого объекта.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по образцу (фигура 3) состоит из транспортера 1, объектов 2, пневматического делителя 3, электроклапана 4, воздушной магистрали 5, оптического датчика 6, видеокамеры 7.
Система разделения потока объектов, на два потока, таких, например, как стеклоизделия, состоящего из объектов разного вида, по образцу работает следующим образом.
По транспортеру 1, в направлении движения, движется основной поток объектов 2, таких, например, как стеклоизделия. Оптический датчик 6 фиксирует объект и подает сигнал в контроллер (на фигуре 3 не показан). Контроллер отслеживает положение объекта, и как только объект дойдет до зоны работы видеокамеры 7, контроллер подает сигнал видеокамере на съемку объекта. Видеокамера, после съемки объекта и сравнения изображения с изображением образца, хранящегося в ее памяти, посылает сигнал контроллеру, по которому он присваивает объекту свойство «соответствует образцу» или «не соответствует образцу». Далее, когда объект дойдет до зоны работы пневматического делителя 3, контроллер исходя из свойств объекта определяет необходимость перемещения объекта, например оператор задал задание - перемещать все объекты со свойством «соответствует образцу». Если объект, находящийся в зоне работы пневматического делителя, имеет свойство «соответствует образцу», то контроллер выдает сигнал на электроклапан 4. Электроклапан 4 подает воздух из воздушной магистрали 5 на пневматический делитель 3, где создается воздушная струя, которая перемещает объект в сторону, на некоторое расстояние, тем самым создавая второй поток объектов. Если в зоне работы пневматического делителя 3 находится объект со свойством «не соответствует образцу», то контроллер не выдает сигнал на электроклапан, и объекты с данным свойством не меняют своего положения на транспортере.
Таким образом, после зоны работы пневматического делителя основной поток объектов делится на два параллельных потока: «соответствует образцу» и «не соответствует образцу». Все эти операции выполняются для каждого объекта.
Использование предлагаемой системы и способов разделения потока объектов позволяет повысить производительность и с высокой точностью осуществлять перемещение объектов, а также их сортирование. Кроме того, снижается трудоемкость разделения потока объектов и уменьшается материалоемкость системы, а также происходит упрощение конструкции при высокой точности деления потока объектов. Применение способа позволяет повысить точность деления потока объектов при одновременном снижении затрат на организацию этого процесса, а также увеличить производительность конвейерной линии за счет быстрого автоматического деления потока объектов по заданным параметрам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты от беспилотных летательных аппаратов | 2023 |
|
RU2813389C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВО МНОЖЕСТВЕННОГО ВЫБОРА ВНОСИМОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО МАТЕРИАЛА | 2014 |
|
RU2765122C2 |
| КАМЕРА ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2813445C1 |
| СИСТЕМЫ, СПОСОБЫ И УСТРОЙСТВО МНОЖЕСТВЕННОГО ВЫБОРА ВНОСИМОГО СЕЛЬСКОХОЗЯЙСТВЕННОГО МАТЕРИАЛА | 2014 |
|
RU2657464C2 |
| СИСТЕМА ДЛЯ ИНКУБАЦИИ И ФОРМИРОВАНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2811721C1 |
| СОРТИРОВОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2589537C2 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КОНТЕЙНЕРОВ В КАМЕРЕ ДЛЯ ИНКУБАЦИИ БИОЛОГИЧЕСКИХ ОБРАЗЦОВ | 2023 |
|
RU2812238C1 |
| СПОРТИВНЫЙ РОБОТ - ТРЕНАЖЕР С ПРОГРАММНЫМ УПРАВЛЕНИЕМ НА ПНЕВМАТИЧЕСКИХ ПРИВОДАХ | 2012 |
|
RU2522093C1 |
| ТУРНИКЕТ ОТРАСЛЕВОЙ РАСПАШНОЙ ШЛЮЗОВОГО ТИПА (ВАРИАНТЫ) | 2023 |
|
RU2836661C1 |
Изобретение предназначено для разделения транспортируемого потока объектов, например стеклоизделий. Объекты поступают на транспортере. На приводе транспортера установлен датчик угловых перемещений. Перед зоной разделения потока установлен оптический датчик, соединенный с контроллером. В зоне разделения потока установлен пневматический делитель, соединенный через электроклапан, ресивер и блок подготовки воздуха с воздушной магистралью. Упрощается процесс разделения потока объектов, повышается его производительность. 2 н. и 5 з.п. ф-лы, 3 ил.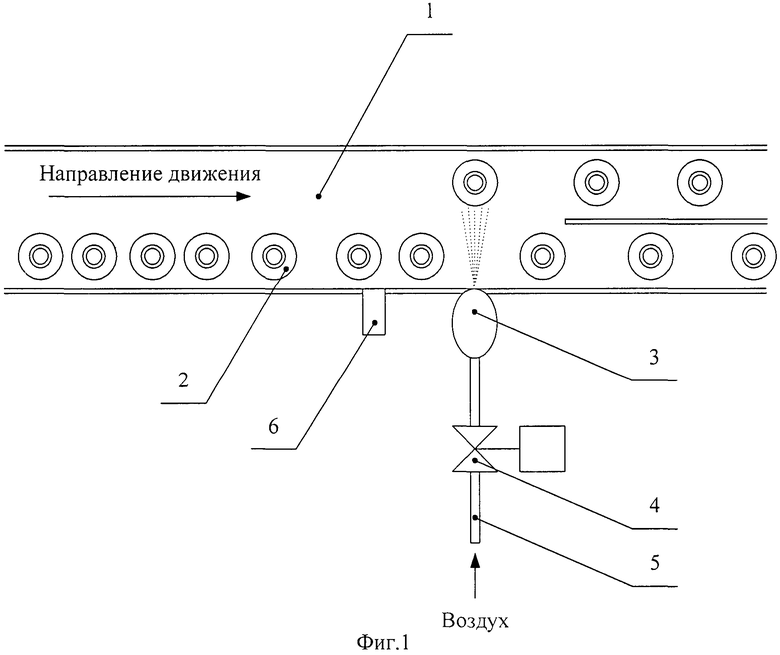
1. Система для разделения потока объектов, таких, например, как стеклоизделия, по меньшей мере, на два потока, содержащая транспортер, по которому указанные объекты поступают вдоль линии в транспортировочном направлении, отличающаяся тем, что дополнительно на приводе транспортера установлен датчик угловых перемещений, а перед зоной разделения потока установлено не менее одного оптического датчика, соединенного с контроллером, в зоне разделения потока установлен пневматический делитель, соединенный через электроклапан, ресивер и блок подготовки воздуха с воздушной магистралью.
2. Система для разделения потока объектов по п.1, отличающаяся тем, что напротив пневматического делителя установлена эжекционная пластина.
3. Система для разделения потока объектов по п.1, отличающаяся тем, что оптические датчики определяют объект по признаку высоты.
4. Система для разделения потока объектов по п.1, отличающаяся тем, что оптические датчики определяют объект по признаку ширины.
5. Система для разделения потока объектов по п.1, отличающаяся тем, что дополнительно установлена видеокамера сравнения объекта с образцом.
6. Система для разделения потока объектов по п.1, отличающаяся тем, что контроллер является логически программируемым.
7. Способ разделения потока объектов, таких, например, как стеклоизделия, по меньшей мере, на два потока, согласно которому объекты транспортируют по некоторой линии в транспортировочном направлении, отличающаяся тем, что оптический датчик определяет объект и подает сигнал на контроллер, который по сигналам датчика угловых перемещений рассчитывает пройденный объектом путь, и как только объект пройдет путь, равный либо больший заданного, с контроллера поступает сигнал на электроклапан, который включает подачу воздуха на пневматический делитель, создается воздушная струя, перемещающая объект в сторону на некоторое расстояние, через заданное время, соответствующее времени перемещения объекта, контроллер снимает сигнал с электроклапана, прекращая подачу воздуха на пневматический делитель.
| US 7837022 B2, 23.11.2010 | |||
| JP 06345241 A, 20.12.1994 | |||
| JP 04308117 A, 30.10.1992. |

