Изобретение относится к средствам борьбы с беспилотными летательными аппаратами, в частности, к устройствам для обнаружения и нейтрализации дронов, вторгшихся в защищаемую воздушную зону. Может быть использовано для обеспечения бесполетной зоны для дронов вокруг объекта охраны путем отслеживания дронов в радиусе наблюдения и путем принудительной их посадки или уничтожения.
Из существующего уровня техники известен ряд технических решений, касающихся систем наблюдения, обнаружения и выведения дронов из строя тем или иным способом. Такие системы осуществляют распознавание дронов при помощи нейросети, программное обеспечение систем связано с аппаратными средствами. Однако в данных системах не представлена проработка аппаратных средств, не представлены особенности компоновки частей каждой системы.
Известна система и способ обнаружения и перехвата дронов по международной заявке на изобретение WO2022172217, F41H 11/02, 2022. Для обнаружения и прогнозирования движения беспилотного летательного аппарата используют машинное обучение и искусственный интеллект как часть системы, тем самым оцифровывая технологию обнаружения дронов. Система состоит из аппаратной составляющей и программного компонента. С помощью аппаратных средств автоматически собирают различные данные с нескольких систем обнаружения дронов и передают данные программному обеспечению искусственного интеллекта. Программный модуль взаимодействует с аппаратными средствами и применяет несколько методов глубокого обучения для обнаружения, распознавания беспилотных летательных аппаратов и для принятия решения о способе перехвата с целью выведения дронов из строя. Для обнаружения дронов используют RGB-камеру, тепловизионную камеру, радиочастотный сканер, детектор PCL, радарный детектор. Уничтожение дронов возможно с помощью лазерной пушки, с помощью электромагнитного ружья, с помощью сетевого оружия, при котором сеть запутывает лопасти винта, выводя беспилотник из строя. Сеть может быть оснащена парашютом для доставки беспилотника на землю. Недостатком является сложность архитектуры системы для обеспечения связи между системой управления и аппаратными средствами, невысокая надежность системы из-за возможности выведения ее из строя посредством радиоатаки.
Известна система и способ защиты контролируемой зоны от беспилотных транспортных средств (БТС) по патенту России на изобретение RU2746102, G06Т 1/40, 2021. Согласно способу, производят обнаружение движущегося объекта в контролируемой зоне с помощью средства первичного обнаружения, определяют с помощью средства первичного обнаружения пространственные координаты обнаруженного движущегося объекта, которые отправляют средству управления и классификации, производят захват изображения обнаруженного движущегося объекта с помощью средства распознавания. Далее классифицируют обнаруженный движущийся объект на основе анализа по меньшей мере одного изображения с помощью средства управления и классификации. При определении движущегося объекта как БТС применяют с помощью средства нейтрализации направленное радиоподавление сигнала управления БТС, которое производится до тех пор, пока БТС не покинет контролируемую зону. Средство первичного обнаружения включает по крайней мере одно из следующих устройств: лидар, который производит лазерное зондирование воздушного пространства, фотокамеру, прибор ночного видения, тепловизор или радар. Определяют пространственные координаты расположения средства первичного обнаружения. Средство распознавания состоит из по крайней мере одной видеокамеры, с помощью которой производят захват обнаруженного движущегося объекта, при этом захват осуществляется согласно пространственным координатам обнаруженного движущегося объекта. Средство распознавания может быть установлено на опорно-поворотном модуле, позволяющем перемещать видеокамеры на 360 градусов вокруг своей оси. Средство распознавания может содержать по крайней мере две видеокамеры, где одна видеокамера предназначена для общего обзора, а вторая видеокамера позволяет произвести многократное увеличение на обнаруженный движущейся объект. Производят сопровождение обнаруженного движущегося объекта, во время которого выполняют приближении к обнаруженному объекту второй видеокамерой для получения по крайней мере одного изображения, на котором представлен обнаруженный движущийся объект с требуемым разрешением, и передачу по крайней мере одного изображения средству управления и классификации. При классификации обнаруженного движущегося объекта анализ производится с помощью нейронных сетей. Недостатком является сложность определения местоположения БТС, длительность распознавания объекта, низкая эффективность средства его нейтрализации.
Из существующего уровня техники известен ряд технических решений, касающихся конструкций турелей с установленным на них оружием для наведения и поражения цели в защищаемой зоне. Однако данные турельные установки не содержат средства обнаружения беспилотных летательных аппаратов, средства вычисления их траектории и средства нейтрализации дронов.
Известна турель для установки оружия по европейскому патенту ЕР2306137, F41А 23/24, 2011. Турель для установки дополнительного оружия на бронированном транспортном средстве содержит платформу, которая может поворачиваться с помощью двигателей. Платформа шарнирно закреплена на втулке, установленной соосно с осью панорамного прицела. Прицел имеет головку, расположенную над платформой и поворотный цилиндрический корпус. Оптоэлектронный прицел снабжен видеокамерой и собственным приводом. Привод поворотной платформы и привод оптоэлектронного прицела снабжены зубчатыми передаточными механизмами. Недостатком является ограниченная функциональность турели, не позволяющая эффективно использовать ее для защиты от беспилотных летательных аппаратов, сложность наведения прицела и оружия на объект.
Известна дистанционно управляемая турель по заявке России на изобретение RU2012101365, F41A 27/00, 2013. Турель содержит неподвижную станину и соединенную с ней через опорный подшипниковый узел вращающуюся платформу, приводимую в движение редуктором и аналоговым электромотором горизонтального наведения (ГН). На платформе через опорный подшипниковый узел установлена качающаяся постель, приводимая в движение редуктором и аналоговым электромотором вертикального наведения (ВН). Подвижные и неподвижные механические части ГН и ВН турели соединены между собой опорными редукторами, на входных валах которых установлены сервоприводы с цифровым управлением. В турели применена бортовая ЭВМ с цифровой системой управления и открытой архитектурой для программного обеспечения и периферийных устройств. На вращающейся платформе установлено две и более постелей для монтажа средств наблюдения и разведки, прожекторов, вооружения, спецсредств и другой полезной нагрузки. Недостатком является отсутствие системы обнаружения и средств нейтрализации беспилотных летательных аппаратов.
В качестве ближайшего аналога заявляемому техническому решению выбрана вооруженная оптоэлектронная турель по патенту России на изобретение RU2672454, F41А 23/24, 2018. Оптоэлектронная турель содержит основание, закрепленное непосредственно на транспортном средстве, корпус, состоящий из поворотной платформы и из опоры с выемкой, и оптоэлектронный прицел. Наружные формы основания и поворотной платформы представляют собой цилиндры вращения, осью которых является одна и та же вертикальная ось Z. Корпус установлен с возможностью поворота вокруг оси Z и приводится во вращение первыми приводными средствами, расположенными внутри основания. Опора с выемкой, в которой закреплено легкое орудие, закреплена на поворотной платформе. Легкое орудие установлено с возможностью поворота вокруг оси Z его ориентацию для стрельбы по целям с разными курсовыми углами осуществляют при помощи первых приводных средств. Легкое орудие 15 установлено также с возможностью поворота вокруг первой оси X. Это позволяет ориентировать легкое орудие по углу места цели при помощи вторых приводных средств, содержащих второй электрический двигатель и установленных на опоре с выемкой. Корпус оптоэлектронного прицела установлен с возможностью поворота вокруг оси Z независимо от поворота корпуса вооруженной оптоэлектронной турели и от легкого орудия. Оптоэлектронный прицел снабжен видеокамерой. Ориентацию по курсовому углу оптоэлектронного прицела с целью наведения легкого орудия и осуществления наблюдений по разным курсовым углам осуществляют при помощи третьих приводных средств, расположенных, как и первые приводные средства, внутри основания. Первый электрический двигатель и третий электрический двигатель работают независимо друг от друга, что позволяет ориентировать по курсовому углу легкое орудие и оптоэлектронный прицел независимо друг от друга. Недостатком является сложность осуществления согласованного движения поворотной платформы, легкого орудия, оптоэлектронного прицела, отсутствие возможности автоматического определения расстояния до цели. Кроме того, турель не предназначена для защиты от дронов.
Таким образом, вышеприведенные технические решения из предшествующего уровня техники не объединяют системы осуществляющие распознавание дронов при помощи нейросети с конструктивно проработанными аппаратными средствами, и с узлами способными осуществлять обнаружение и выведение из строя беспилотных летательных аппаратов.
Техническим результатом заявляемого изобретения является расширение арсенала технических средств для защиты определенной воздушной зоны от беспилотных летательных аппаратов.
Технический результат обеспечивается за счет того, что в устройстве защиты от беспилотных летательных аппаратов, содержащем турель с поворотной платформой и опору для установки оружия, выполненную с возможностью вращения в вертикальной и горизонтальной плоскости, систему наблюдения, привод поворотной платформы и привод вращения опоры оружия, выполненные с возможностью их согласованного вращения, управляющее устройство, связанное с системой наблюдения, с устройством получения данных, с приводами для вращения поворотной платформы и опоры для установки оружия, согласно изобретению, устройство содержит неподвижный модуль, с установленными в нем приводом вращения поворотной платформы и приводом опоры для установки оружия, турельный модуль и модуль управления, в модуле управления расположены основной контроллер, снабженный нейросетью и графическим процессором, контроллер исполнительных механизмов, связанный с основным контроллером, плата интерфейсная, связанная с основным контроллером и удаленным интерфейсным модулем, плата с SDR-приемником, связанная с основным контроллером, плата с датчиками определения пространственного положения, связанная с интерфейсной платой, устройство получения данных о работе приводов, связанное с интерфейсной платой, турельный модуль содержит цилиндрический корпус на боковой поверхности которого размещена хотя бы одна опора для установки оружия и антенны SDR-приемника, которая связана с платой с SDR-приемником, опора для установки оружия снабжена датчиком угла поворота, связанным с основным контроллером, а на неподвижном модуле установлен механический ограничитель поворота опоры для установки оружия, на опоре для установки оружия размещен толкатель спускового механизма оружия, связанный с контроллером исполнительных механизмов, опора для установки оружия и поворотная платформа снабжены датчиками отсчета начала движения, связанными с основным контроллером, на корпусе модуля управления, расположена система наблюдения, состоящая из стереопар, расположенных по периметру модуля управления, каждая стереопара содержит две связанные с основным контроллером видеокамеры с заданным расстоянием между ними и параллельно расположенными осями, передаточные механизмы приводов выполнены с возможностью и одновременного, и последовательного вращения поворотной платформы и опоры для установки оружия, драйверы двигателей приводов связаны с контроллером исполнительных механизмов.
Кроме того, в качестве оружия могут использовать дробовик.
Кроме того, в качестве оружия могут использовать электромагнитное оружие.
Технический результат обеспечивается модульным исполнением устройства. Разделение устройства на неподвижный модуль, поворотный турельный модуль и модуль управления, позволяет разделить системы и узлы устройства по функциональному назначению, расположить их в самостоятельных корпусах. Это повышает функциональность устройства и обеспечивает универсальность его применения, дает возможность располагать модули в разных вариантах. Устройство может использоваться как отдельное сооружение, установленное на опорах и содержащее все три модуля для защиты охраняемой зоны от беспилотных летательных аппаратов. Модуль управления с расположенной на нем системой наблюдения может быть установлен отдельно от турельного модуля. Может быть размещен, например, на высокой мачте, а турельный модуль с оружием и неподвижным модулем приводов может быть расположен в другом месте. При этом может быть использовано несколько таких турельных модулей, например, для охраны аэропорта. Возможно использование отдельного модуля управления с расположенной на нем системой наблюдения для слежения за летающими объектами. Расположение в модуле управления основного контроллера, снабженного обученной нейросетью позволяет распознавать дроны, попадающие в поле зрения системы наблюдения и выполнять управление аппаратными средствами. Снабжение основного контроллера графическим процессором позволяет производить точный расчет координат летящего объекта, предсказывать его траекторию для точности прицела. Использование интерфейсной платы, связанной с основным контроллером и удаленным интерфейсным модулем, позволяет оператору опционального интерфейсного модуля при необходимости вмешиваться в работу устройства и корректировать его действия, например, перенавести, включить, выключить электромагнитное оружие, отменить отстрел определенных дронов и т.д. Это повышает функциональность устройства. Связь интерфейсной платы с устройством получения данных о работе приводов позволяет оператору при необходимости контролировать движение поворотных частей. Связь интерфейсной платы с платой с датчиками определения положения позволяет оператору интерфейсного модуля контролировать показания датчиков и приборов, например, акселерометра и гироскопа, следить за изменением положения частей устройства в пространстве. Связь интерфейсной платы с основным контроллером позволяет передавать ему данные с приборов и устройств и получать необходимые управляющие команды. Плата с SDR-приемником, связанная с основным контроллером, позволяет использовать узконаправленную антенну для поиска дронов по характерным всплескам мощности в нескольких участках частотного спектра радиоизлучения. Это расширяет функционал устройства за счет применения дополнительных средств обнаружения и за счет расширения радиуса обнаружения беспилотных летательных аппаратов. Использование именно SDR-приемника позволяет применять пассивные методы обнаружения дронов, в отличии от аналогов, где используются радары. Антенна SDR-приемника предназначена только для приема радиосигналов и не предназначена для их излучения, что повышает безопасность использования устройства. Установка антенны на подвижной опоре для оружия позволяет использовать именно узконаправленную антенну, которая позволяет принимать сигналы только с одного направления, а вращение опоры позволяет изменять направления для обнаружения радиосигналов. Датчик угла поворота опоры для установки оружия, связанный с основным контроллером позволяет устанавливать оружие или узконаправленную антенну под необходимым углом для поражения дрона или приема радиосигнала. Установка механического ограничителя поворота опоры для установки оружия предотвращает опускание оружие на угол, опасный для окружающих, повышает безопасность использования устройства. На опоре для установки оружия размещен толкатель спускового механизма оружия, связанный с контроллером исполнительных механизмов, что позволяет автоматически приводить в действие оружие. Снабжение опоры для установки оружия и поворотной платформы турельного модуля датчиками отсчета начала движения, связанными с основным контроллером, позволяет производить каблировку для точной установки оружия для поражения дрона или для установки антенны SDR-приемника в нужном направлении. Расположение видеокамер системы наблюдения по всему периметру верхней части корпуса модуля управления позволяет расширить угол обзора до 360° и вести эффективное наблюдение за пространством в охраняемой зоне даже при перекрытии угла обзора одной их видеокамер опорой с оружием, что улучшает функциональность и повышает эффективность его использования. Образование стереопар из видеокамер системы наблюдения позволяет зафиксировать дрон как минимум двумя видеокамерами с разных ракурсов. По фиксированному расстоянию между осями камер и расстоянию от объекта до каждой из камер с помощью программы основного контроллера быстро определяют точные координаты дрона, а с помощью графического процессора строят его траекторию для точного прицела оружия, что повышает эффективность устройства за счет быстродействия и точности выстрелов. Передаточные механизмы приводов выполнены с возможностью и одновременного, и последовательного вращения поворотной платформы с опорой для установки оружия, что позволяет при определении местонахождения цели выбрать необходимый режим работы двигателей для осуществления быстрого поворота вращающихся элементов. Для возможности осуществления данных режимов драйверы двигателей приводов связаны с контроллером исполнительных механизмов. Возможность устанавливать на одну опору узконаправленную антенну SDR-приемника, дробовик, электромагнитное оружие позволяет улучшить функциональные свойства устройства и его универсальность. Таким образом, модульное исполнение устройства, его конструктивная проработка, применение узконаправленной антенны SDR-приемника и системы стереопар позволяют расширить арсенал технических средств для защиты определенной воздушной зоны от беспилотных летательных аппаратов, расширить функциональность устройства, повысить эффективность и безопасность его работы.
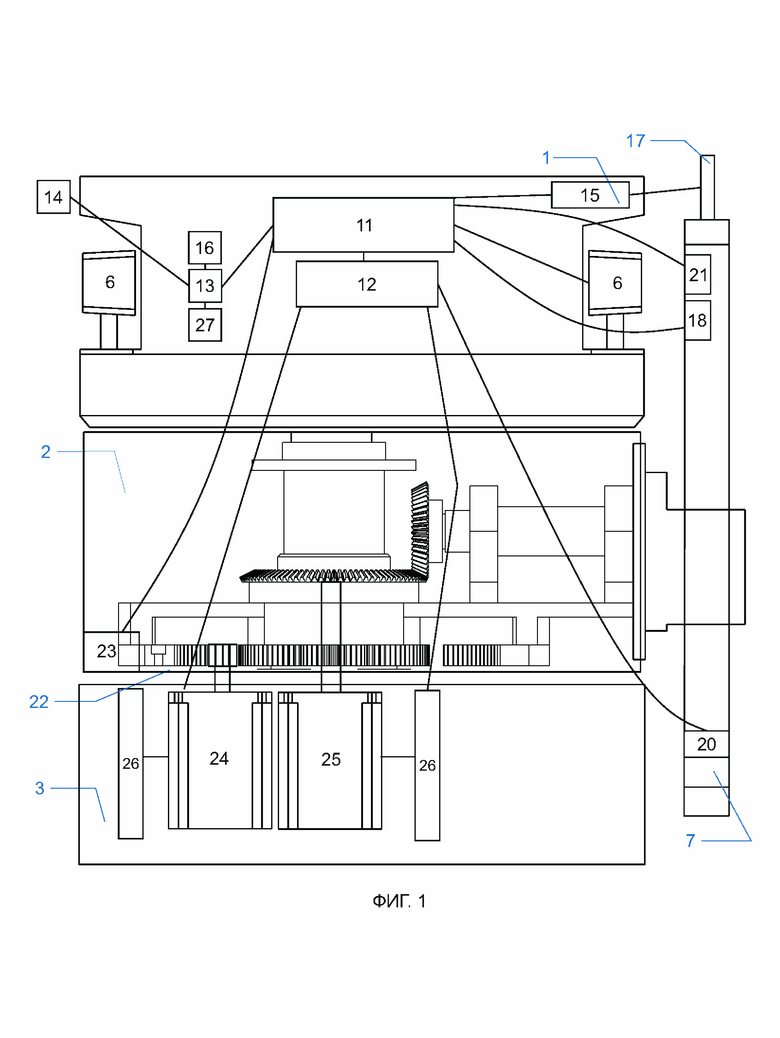
На Фигуре 1 представлена схема устройства защиты от беспилотных летательных аппаратов.
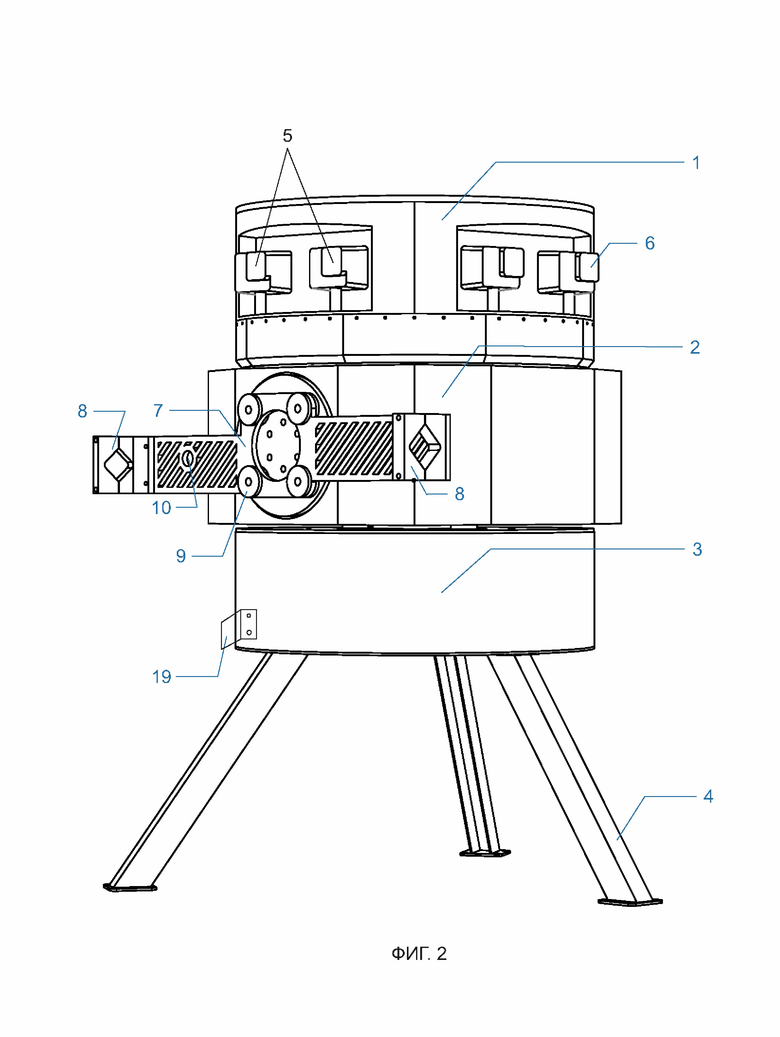
На Фигуре 2 представлен общий вид устройства защиты от беспилотных летательных аппаратов.
Устройство защиты от беспилотных летательных аппаратов содержит модуль управления 1, турельный модуль 2, неподвижный модуль 3. Модули 1, 2, 3 установлены один над другим, образуя вертикальную башню, установленную на опорах 4. Опоры 4 могут быть выполнены в виде лап, уходящих в стороны под 45°. На корпусе модуля управления 1 установлены стереопары 5, состоящие из видеокамер 6. Оси каждой из двух видеокамер 6, составляющих стереопару 5 параллельны. На наружной боковой поверхности корпуса турельного модуля 2 расположена вращающаяся опора 7 для установки оружия. Опора 7 содержит держатели оружия 8, демпферы 9, отверстие 10 для размещения толкателя 20 спускового механизма оружия. Если на одном устройстве устанавливают два вида оружия, то их опоры 7 крепят в диаметрально противоположных точках цилиндрического корпуса турельного модуля 2. В модуле управления 1 размещен основной контроллер 11, содержащий графический процессор и нейросеть программы с искусственным интеллектом. С основным контроллером 11 связан контроллер 12 исполнительных механизмов, интерфейсная плата 13, связанная с удаленным интерфейсным модулем 14 оператора, плата 15 с SDR-приемником. Плата 16 с датчиками определения пространственного положения и устройство 27 получения данных о работе приводов связаны с интерфейсной платой 13. На опоре 7 для установки оружия размещена узконаправленная антенна 17, связанная с платой 15 с SDR-приемником. Опора 7 для установки оружия снабжена датчиком угла поворота 18, связанным с основным контроллером 11. На неподвижном модуле 3 установлен механический ограничитель 19 поворота опоры 7. На опоре 7 для установки оружия размещен толкатель 20 спускового механизма оружия, связанный с контроллером 12 исполнительных механизмов. Опора 7 для установки оружия снабжена датчиком 21 отсчета начала движения. Поворотная платформа 22 турельного модуля 2 снабжена датчиком 23 отсчета начала движения. Датчики 21 и 23 связаны с основным контроллером 11. В качестве датчиков 21 и 23 могут, например, использовать магнит в сочетании с датчиком Холла или оптопару. Все видеокамеры 6 стереопар 5 связанны с основным контроллером 11. В неподвижнем модуле 3 установлен шаговый двигатель 24 привода поворотной платформы 22 и шаговый двигатель 25 привода опоры 7 для установки оружия. Драйверы 26 двигателей 24 и 25 приводов связаны с контроллером исполнительных механизмов 12. Двигатель 24 связан системой зубчатых передач с поворотной платформой 22 турельного модуля 2. Двигатель 25 связан системой зубчатых передач с осью поворота опоры 7 для установки оружия. Выбранное конструкционное решение системы зубчатых передач предназначено для понижения требований к мощности шагового двигателя и увеличению точности наведения исполнительного механизма.
Устройство защиты от беспилотных летательных аппаратов работает следующим образом.
С помощью видеокамер 6 стереопар 5, обеспечивающих обзор в радиусе 360° ведут наблюдение за охраняемой зоной воздущного пространста. Поле съемки может обеспечиваться видеокамерами 6 с углом обзора от 10х10 для камер с выкрученными трансфокаторами до 120х120. Предпочтительнее использовать видеокамеры 6 с углом 90х90, они перекрывают все поле зрения и обеспечивают максимальное количество пикселей на метр квадратный. При попадании летящего объекта в поле зрения любых камер 6 любой стереопары 5 на основной контроллер 11 передается сигнал об обнаружении объекта. В случае распознавания дрона нейросетью с помощью программы основного контроллера 11 определяют расстояние до дрона по изображениям дрона с разных ракурсов камер 5. С контроллера 11 передают сигнал на контроллер 12 исполнительных механизмов, который в свою очередь передает сигнал драйверам 26 двигателя 24 привода поворотной платформы 22 и двигателя 25 привода опоры 7. После включения двигателей 24 и 25 с помощью приводных механизмов с зубчатыми передачами происходит поворот платформы 22 турельного модуля 2 и поворот опоры 7 с установленным на ней оружием. Двигатель 25 предназначен для прицеливания, т.е., для перемещения в вертикальной плоскости ствола оружия. В качестве оружия может быть использовано электромагнитное оружие, например ЛПД-801 или полуавтоматический дробовик например, Сайга-12 (на чертеже не показаны). Горизонтальная поворотная платформа 22 вращается в пределах от 0 до 360° с угловой скоростью не менее одного оборота в секунду. Опора 7 с установленным на ней оружием способна вращаться в пределах 0-90 градусов и обеспечивать угловую скорость не менее оборота в секунду. В целях безопасности окружающих угол поворота опоры 7 ограничивают до 50° при помощи механического ограничителя 19, установленного на корпусе неподвижного модуля 3. Необходимое положение поворотной платформы 22 и опоры 7 с оружием определяют от точек калибровки при помощи датчиков 21 и 23 отсчета начала движения. Вычисление угла поворота производят с помощью основного контроллера 11 исходя из текущего положения поворотной платформы 22 и опоры 7 при включении шаговых двигателей 24, 25 и, исходя из количества пройденных ими шагов. Из первоначального положения поворотные элементы 22 и 7 перемещаются в необходимое конечное положение. Конечное положение дополняется предсказанием нового положения дрона из-за его непрерывного движения, с помощью графического процессора и по предыдущим, сглаженным фильтром Калмана определяется положение для стрельбы для поворотной платформы 22 и опоры 7 с установленным оружием. С помощью передаточных механизмов платформа 22 и опора 7 с установленным оружием занимают положение для стрельбы. Далее контроллер 12 исполнительных механизмов передает команду на срабатывание толкателя 20 спускового механизма оружия, происходит выстрел и поражение дрона. В случае использования дробовика происходит механическое повреждение элементов конструкции дрона, в случае использования электромагнитного оружия дрон поражают возмущением электромагнитного поля, оказывающим влияние на его систему управления. При использовании дробовика или электромагнитного ружья устройство способно реагировать на дрон летящий на расстоянии от 20 м со скоростью не выше 100км/ч., и до 200 м со скоростью не выше 300км/ч При использовании узконаправленной антенны 17 поиск дронов возможен без использования видеокамер 6 стереопар 5. Определение положения объекта происходит по характерным всплескам мощности в нескольких участках частотного спектра радиоизлучения, которые воспринимаются узконаправленной антенной 17 при повороте опоры 7, на которой она размещена. С помощью антенны 17 возможно обнаружение дронов на расстоянии до 3км с точностью ± 10 градусов. Форма антенны 17 позволяет излучать или принимать сигналы только с одного направления. Поиск по спектру радиоизлучения осуществляют с помощью SDR-приемника, установленного на плате 15. SDR-приемник принимает сигнал узконаправленной антенны 17 и передает его в основной контроллер 11, где происходит преобразование Фурье для получения характеристик амплитуды/мощности и частоты излучения. Поскольку в небе не находятся телефоны, рации, роутеры, то наличие любого источника радиоизлучения с сигналом в диапазоне от 400 МГц до 5 ГГц расценивается как обнаружение дрона. В устройстве радиомодуль с SDR-приемником не используют для излучения сигналов, а используют только для приема радиосигналов. Устройство защиты от беспилотных летательных аппаратов может работать полностью автономно или с участием человека. При необходимости используют удаленный опциональный интерфейсный модуль 14, связанный проводной связью с интерфейсной платой 13. На интерфейсный модуль 14 поступают данные о местонахождении дрона, о текущем положении поворотных элементов. Оператор интерфейсного модуля 14 имеет возможность корректировать работу устройства в части команд, подаваемых на оружие. Все части и элементы устройства связаны проводной связью. Проводная связь позволяет наиболее быстро и точно определить координаты цели в любых условиях и не подвержена помехам, присущим беспроводной связи, таким как туман, осадки, листва, и т.п., которые глушат сигналы. Устройство может быть подсоединено к сети 220 В. Возможны различные варианты использования модулей устройства. Возможна установка модулей, собранных в единую конструкцию на высоком стационарном объекте, предпочтительно на крыше здания с использованием устройства вышеописанным способом. Модуль управления 1 с видеокамерами 6 могут располагать отдельно на высокой мачте, а турельный модуль 2 с оружием и совместно с неподвижным модулем 3 могут располагать в другом месте. Могут использовать несколько турельных модулей 2 с оружием. Между модулем управления 1 турельным модулем 2 устанавливают проводную связь на расстояние до 40 метров. Например, такая компоновка может быть применена в аэропорту. Возможно использование одного модуля управления 1 для наблюдения за летающими объектами.
Таким образом, заявляемое изобретение позволяет расширить арсенал технических средств для защиты определенной воздушной зоны от беспилотных летательных аппаратов, расширить функциональность устройства, повысить эффективность его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| Устройство для дистанционной стрельбы | 2024 |
|
RU2839417C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2023 |
|
RU2828680C1 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820361C1 |
| БОЕВОЙ МУЛЬТИКОПТЕР С КУМУЛЯТИВНЫМ СНАРЯДОМ | 2023 |
|
RU2818378C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2820360C1 |
| Система наблюдения и противодействия беспилотным летательным аппаратам | 2020 |
|
RU2738508C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Автономный беспилотный летательный аппарат для доставки малокалиберных боеприпасов до цели | 2023 |
|
RU2826931C1 |
Изобретение может быть использовано для обеспечения бесполетной зоны для дронов вокруг объекта охраны путем отслеживания дронов в радиусе наблюдения и принудительной посадки или уничтожения. Устройство содержит неподвижный модуль с установленными в нем приводом вращения поворотной платформы и приводом опоры для установки оружия, турельный модуль и модуль управления. В модуле управления расположены основной контроллер, снабженный нейросетью, и графический процессор, контроллер исполнительных механизмов, связанный с основным контроллером, плата интерфейсная, связанная с основным контроллером и удаленным интерфейсным модулем, плата с SDR-приемником, связанная с основным контроллером, плата с датчиками определения пространственного положения, связанная с интерфейсной платой, устройство получения данных о работе приводов, связанное с интерфейсной платой. Турельный модуль содержит цилиндрический корпус, на боковой поверхности которого размещена хотя бы одна опора для установки оружия и антенны SDR-приемника, которая связана с платой с SDR-приемником. Повышается эффективность противодействия БПЛА. 2 з.п. ф-лы, 2 ил.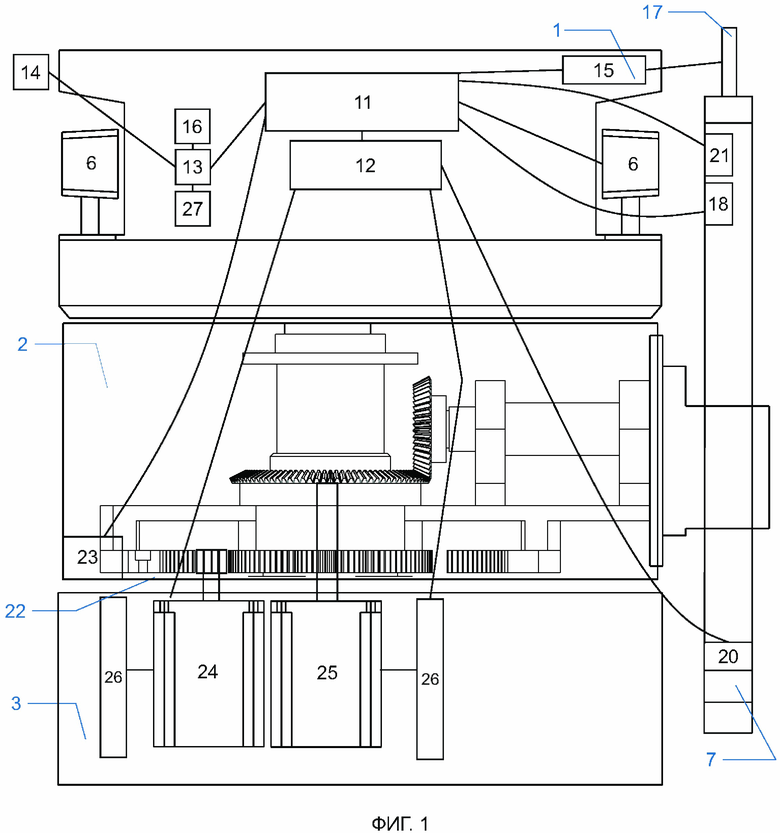
1. Устройство защиты от беспилотных летательных аппаратов, содержащее турель с поворотной платформой и опору для установки оружия, выполненную с возможностью вращения в вертикальной и горизонтальной плоскостях, систему наблюдения, привод поворотной платформы и привод вращения опоры для установки оружия, выполненные с возможностью их согласованного вращения, управляющее устройство, связанное с системой наблюдения, с устройством получения данных, с приводами для вращения поворотной платформы и опоры для установки оружия, отличающееся тем, что устройство содержит неподвижный модуль с установленными в нем приводом вращения поворотной платформы и приводом опоры для установки оружия, турельный модуль и модуль управления, в модуле управления расположены основной контроллер, снабженный нейросетью для распознавания беспилотных летательных аппаратов, и графический процессор для определения точных координат беспилотных летательных аппаратов, контроллер исполнительных механизмов, связанный с основным контроллером, плата интерфейсная, связанная с основным контроллером и удаленным интерфейсным модулем, плата с SDR-приемником, связанная с основным контроллером, плата с датчиками определения пространственного положения, связанная с интерфейсной платой, устройство получения данных о работе приводов, связанное с интерфейсной платой, турельный модуль содержит цилиндрический корпус, на боковой поверхности которого размещена хотя бы одна опора для установки оружия и антенны SDR-приемника, которая связана с платой с SDR-приемником, опора для установки оружия снабжена датчиком угла поворота, связанным с основным контроллером, а на неподвижном модуле установлен механический ограничитель поворота опоры для установки оружия, на опоре для установки оружия размещен толкатель спускового механизма оружия, связанный с контроллером исполнительных механизмов, опора для установки оружия и поворотная платформа снабжены датчиками отсчета начала движения, связанными с основным контроллером, на корпусе модуля управления расположена система наблюдения, состоящая из стереопар, расположенных по периметру модуля управления, каждая стереопара содержит две связанные с основным контроллером видеокамеры с заданным расстоянием между ними и параллельно расположенными осями, передаточные механизмы приводов выполнены с возможностью и одновременного, и последовательного вращения поворотной платформы с опорой для установки оружия, драйверы двигателей приводов связаны с контроллером исполнительных механизмов.
2. Устройство защиты от беспилотных летательных аппаратов по п.1, отличающееся тем, что в качестве орудия используют дробовик.
3. Устройство защиты от беспилотных летательных аппаратов по п.1, отличающееся тем, что в качестве орудия используют электромагнитное оружие.
| ВООРУЖЕННАЯ ОПТОЭЛЕКТРОННАЯ ТУРЕЛЬ | 2015 |
|
RU2672454C2 |
| Система и способ защиты контролируемой зоны от беспилотных транспортных средств | 2019 |
|
RU2746102C1 |
| WO 2022172217 A1, 18.08.2022 | |||
| СРЕДСТВО ДЛЯ ПРОФИЛАКТИКИ И ЛЕЧЕНИЯ ГРИППА | 2005 |
|
RU2306137C1 |
| KR 1020180040925 А, 23.04.2018 | |||
| US 20220074698 А1, 10.03.2022. | |||
