Область техники
Настоящее изобретение относится к трехцилиндровому двигателю.
Уровень техники
Патентный Документ 1 раскрывает трехцилиндровый двигатель, который имеет такую конструкцию, чтобы задавать компонент пары сил первого порядка в продольном направлении по оси коленчатого вала практически нулевым посредством использования весов, которые уменьшают пару сил, сформированную при возвратно-поступательном движении перемещающихся частей, включающих в себя поршни.
Патентные документы
Патентный Документ 1: Выложенная заявка на патент Японии №2006-175894
Сущность изобретения
Тем не менее, в технологии Патентного Документа 1, чтобы задавать компонент пары сил первого порядка в продольном направлении по оси коленчатого вала практически нулевым, веса являются относительно большими, что зачастую приводит к увеличенному весу двигателя.
Соответственно, в настоящем изобретении при условии, что Kv представляет собой жесткость пружины, по меньшей мере, одной из опор двигателя в продольном направлении по оси коленчатого вала, KH представляет собой жесткость пружины опоры двигателя в направлении относительно вертикальной оси по оси коленчатого вала, Mv представляет собой компонент (продольный момент) пары сил первого порядка, сформированный посредством трехцилиндрового двигателя в продольном направлении по оси коленчатого вала, Mн представляет собой компонент (момент относительно вертикальной оси) пары сил первого порядка, сформированный посредством трехцилиндрового двигателя в направлении относительно вертикальной оси по оси коленчатого вала, и Mv0 представляет собой сумму Mv и Mн, в таком случае жесткости пружины задаются так, что Kv>Kн, и секция смягчения вибрации задается в модуле смягчения вибрации системы коленчатого вала (коленчатого вала и части, которая функционирует согласованно с коленчатым валом) так, что 0<Mv/Mv0<0,5.
В трехцилиндровом двигателе обычно формируется несбалансированная пара сил между силой в продольном направлении и силой в направлении относительно вертикальной оси, что зачастую приводит к тому, что двигатель осуществляет прецессионное движение. Такая несбалансированная пара сил становится причиной вибрации, когда двигатель монтируется в транспортном средстве. В настоящем изобретении устанавливается Kv>Kн, и система коленчатого вала содержит модуль смягчения вибрации так, что он удовлетворяет условию 0<Mv/Mv0<0,5 и задает вибрацию относительно вертикальной оси всего двигателя, превышающей продольную вибрацию, тем самым уменьшая вибрацию транспортного средства в целом при подавлении веса модуля смягчения вибрации.
Краткое описание чертежей
Фиг.1 - вид спереди монтажной конструкции трехцилиндрового двигателя согласно настоящему изобретению в транспортном средстве.
Фиг.2 - вид в перспективе, схематично иллюстрирующий ключевые части трехцилиндрового двигателя согласно настоящему изобретению.
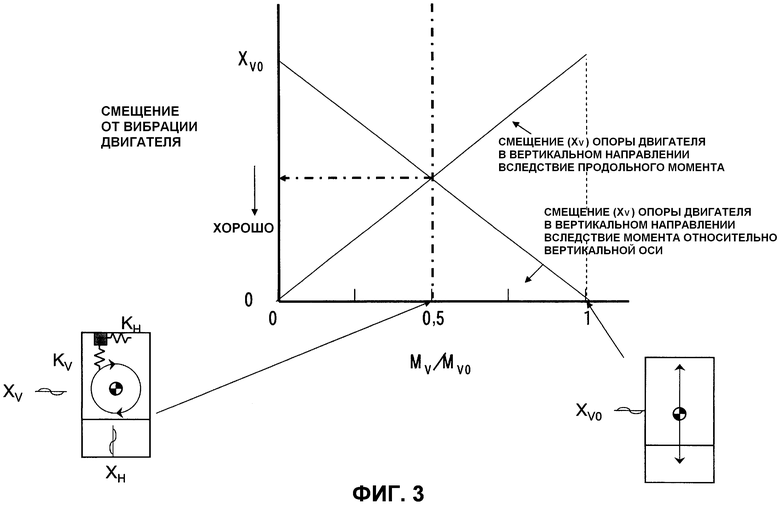
Фиг.3 - схема, схематично иллюстрирующая традиционный подход к регулированию уравновешивающей массы.
Фиг.4 - вид в перспективе, более конкретно иллюстрирующий ключевые части трехцилиндрового двигателя настоящего изобретения при показе одного примера способа присоединять уравновешивающие массы.
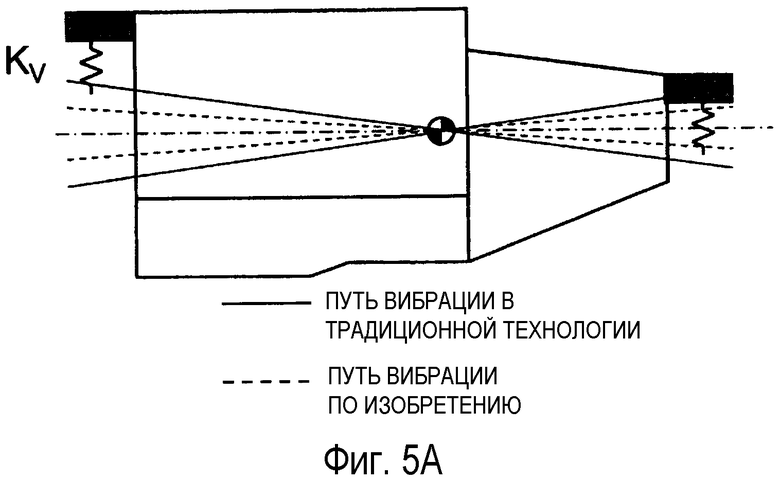
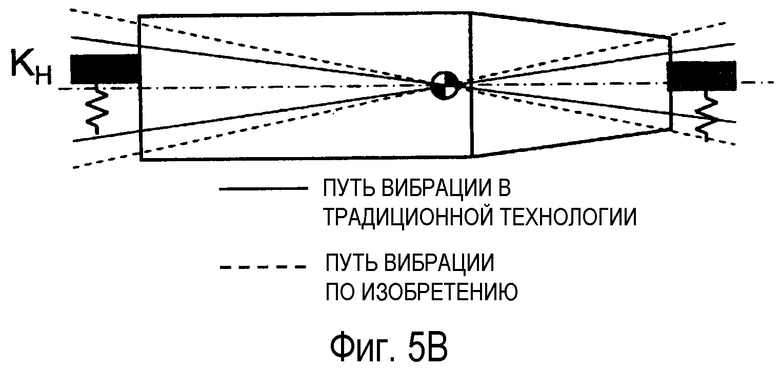
Фиг.5 - чертежи, схематично иллюстрирующие состояние вибрации, возникающее, когда настоящее изобретение применяется к трехцилиндровому двигателю, монтируемому поперек в транспортном средстве, при этом чертеж (a) является иллюстрацией, соответствующей виду спереди трехцилиндрового двигателя при просмотре спереди транспортного средства, чертеж (b) является иллюстрацией, соответствующей виду сверху трехцилиндрового двигателя, а чертеж (c) является иллюстрацией, соответствующей виду сбоку трехцилиндрового двигателя при просмотре сбоку транспортного средства.
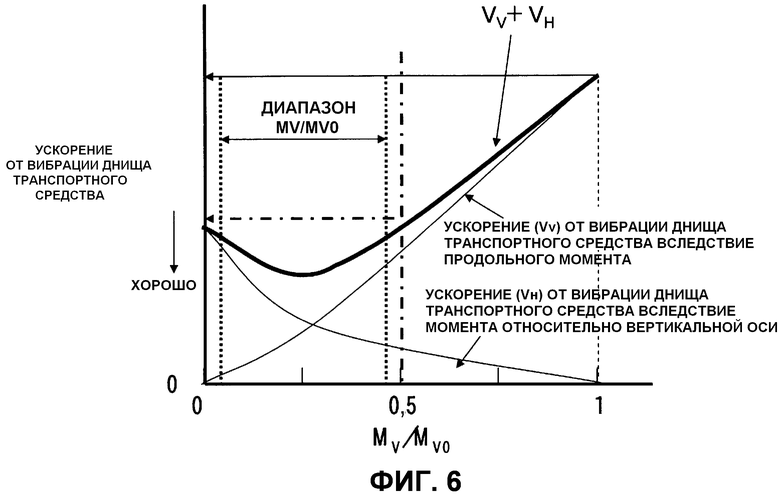
Фиг.6 - схема, иллюстрирующая диапазон настроек для уравновешивающего веса системы коленчатого вала трехцилиндрового двигателя настоящего изобретения.
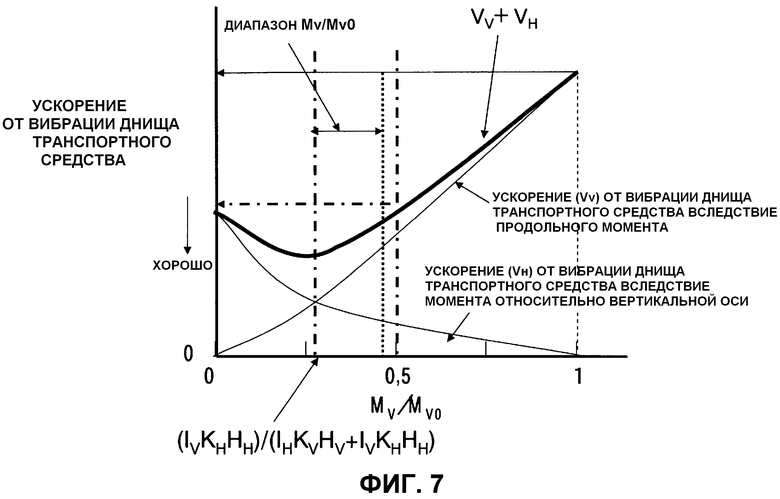
Фиг.7 - схема, иллюстрирующая диапазон настроек для уравновешивающего веса системы коленчатого вала трехцилиндрового двигателя настоящего изобретения.
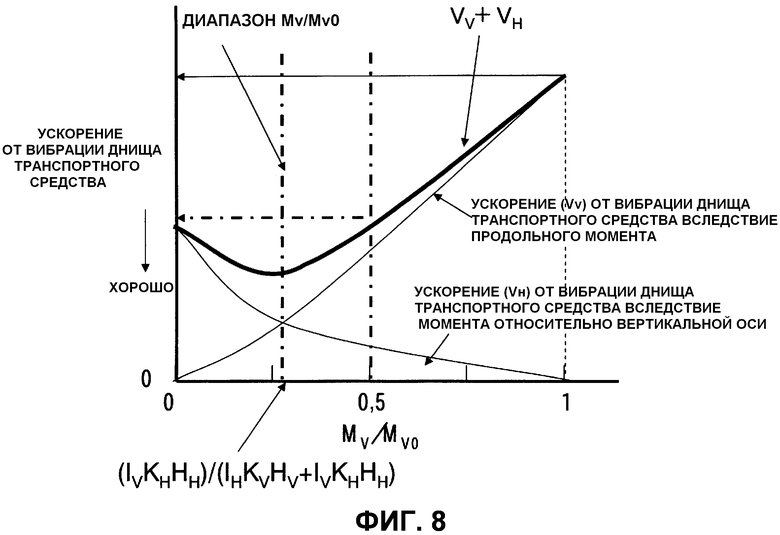
Фиг.8 - схема, иллюстрирующая диапазон настроек для уравновешивающего веса системы коленчатого вала трехцилиндрового двигателя настоящего изобретения.
Фиг.9 - схема, схематично иллюстрирующая другой вариант присоединения уравновешивающих масс в трехцилиндровом двигателе настоящего изобретения.
Фиг.10 - схематичная иллюстрация второго варианта осуществления трехцилиндрового двигателя согласно настоящему изобретению.
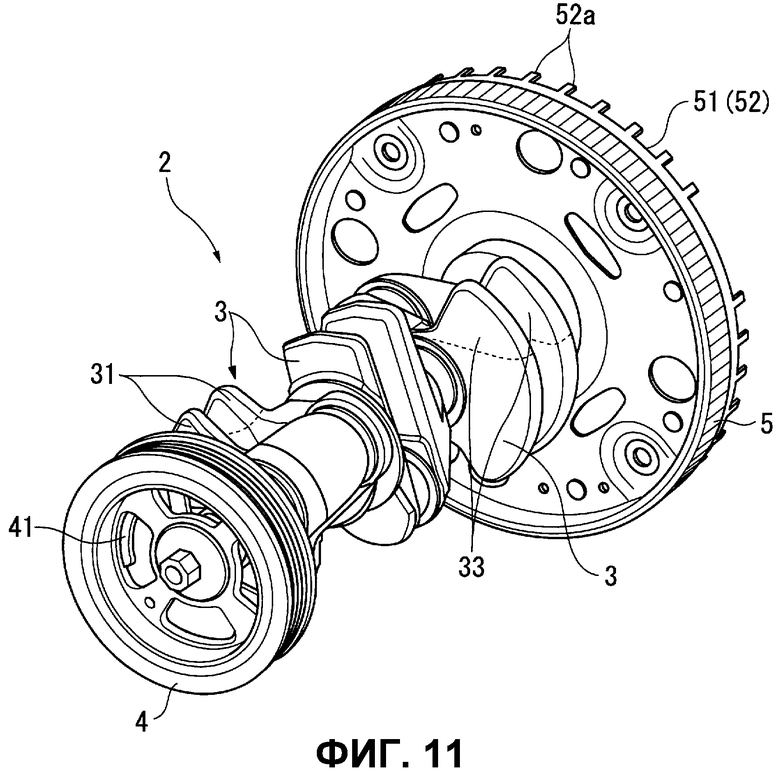
Фиг.11 - схематичная иллюстрация третьего варианта осуществления трехцилиндрового двигателя согласно настоящему изобретению.
Фиг.12 - схематичная иллюстрация третьего варианта осуществления трехцилиндрового двигателя согласно настоящему изобретению.
Фиг.13 - схематичная иллюстрация шкива коленчатого вала, используемого в другом варианте осуществления трехцилиндрового двигателя согласно настоящему изобретению.
Варианты осуществления изобретения
Далее, варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
Фиг.1 является видом спереди монтажной конструкции трехцилиндрового двигателя согласно настоящему изобретению, монтируемому в транспортном средстве, а фиг.2 является видом в перспективе, схематично иллюстрирующим ключевые части системы основного движения трехцилиндрового двигателя 1, к которому применяется изобретение.
Модуль 1 двигателя содержит трехцилиндровый рядный двигатель 1a и трансмиссию 1b и поддерживается на кузове транспортного средства 12 через множество опорных элементов, таких как опоры 10A и 10B двигателя и реактивная штанга 11.
В варианте осуществления модуль 1 двигателя монтируется поперек на кузове транспортного средства таким образом, что коленчатый вал 2 двигателя 1a проходит в направлении ширины транспортного средства.
В этом подробном описании множество направлений движения (т.е. продольное направление, направление относительно вертикальной оси, направление крена) модуля 1 двигателя задается с использованием центральной оси (оси X) коленчатого вала 2 в качестве базиса. Более конкретно, направление вокруг оси Y (т.е. оси, проходящей в продольном направлении транспортного средства), которое является перпендикулярным оси коленчатого вала и идет горизонтально, задается как продольное направление, направление вокруг оси Z, которое является перпендикулярным оси коленчатого вала и проходит в вертикальном направлении, задается как направление относительно вертикальной оси, а направление вокруг оси коленчатого вала задается как направление крена.
Каждый из обоих концов модуля 1 двигателя в направлении оси коленчатого вала содержит кронштейн 13A или 13B. В частности, кронштейн 13A располагается над коленчатым валом 2 и обеспечивается на поперечной торцевой поверхности концевой части по ширине транспортного средства двигателя 1a, а другой кронштейн 13B обеспечивается на верхней торцевой поверхности концевой части по ширине транспортного средства трансмиссии 1b. Каждый из кронштейнов 13A или 13B соединяется с соответствующей из опор 10A и 10B двигателя посредством болта и т.п. Т.е. модуль 1 двигателя поддерживается на кузове транспортного средства 12 через опоры 10A и 10B двигателя, которые размещаются с обоих концов двигателя 1a вдоль направления оси коленчатого вала. Опоры 10A и 10B двигателя, соответственно, присоединены к передним боковым элементам 14, которые проходят в продольном направлении транспортного средства вдоль обеих сторон переднего пространства (т.е. моторного отсека) кузова транспортного средства.
В этом варианте осуществления жесткость Kv пружины каждой опоры 10A двигателя в вертикальном направлении (которое соответствует продольному направлению по оси коленчатого вала) транспортного средства задается превышающей жесткость пружины Kн каждой опоры 10A двигателя в продольном направлении (которое соответствует направлению относительно вертикальной оси по оси коленчатого вала). Т.е. посредством задания жесткости Kv пружины в вертикальном направлении транспортного средства сравнительно большой, модуль 1 двигателя, который имеет большую массу, может поддерживаться более стабильно, и износостойкость опоры 10A двигателя может быть повышена. Дополнительно, поскольку резонансная частота в вертикальном направлении транспортного средства вследствие предоставления модуля 1 двигателя и опор 10A и 10B двигателя увеличивается, комфорт во время езды транспортного средства может быть повышен посредством снижения вертикальной тряски двигателя. Кроме того, посредством снижения жесткости пружины Kн в продольном направлении транспортного средства ослабление вибрации в таком направлении увеличивается. Следует отметить, что жесткость пружины может надлежащим образом регулироваться посредством изменения формы и материала упругого элемента (не показан), который используется в опоре 10A двигателя и изготовлен из упругого тела, к примеру из резинового материала и т.п.
Реактивная штанга 11 располагается под коленчатым валом 2 и размещается так, что она поддерживает модуль 1 двигателя на передней поперечине 15, которая проходит в направлении ширины транспортного средства в нижней части переднего пространства кузова транспортного средства, при этом реактивная штанга 11 главным образом выполнена с возможностью ограничения движения модуля 1 двигателя в направлении крена.
Если, из реакций передачи вибрации от опоры 10A двигателя к днищу транспортного средства, реакция передачи в продольном направлении по оси коленчатого вала (т.е. в вертикальном направлении транспортного средства) представляется посредством Hv, и реакция передачи в направлении относительно вертикальной оси по оси коленчатого вала (т.е. в продольном направлении транспортного средства) представляется посредством Hн, обычно устанавливается соотношение "Hv>Hн", поскольку кузов транспортного средства имеет большую длину в продольном направлении и легче перемещается в ответ на воздействие, ориентированное в вертикальном направлении, чем на воздействие, ориентированное в продольном направлении, в положении опоры 10A двигателя.
Посредством ссылок Wb1-Wb3 на фиг.2 обозначаются множество противовесов 3 (см. фиг.4, который поясняется ниже), схематично проиллюстрированных в качестве точечных масс, которые составляют часть уравновешивающего веса (т.е. модуля смягчения вибрации), который подавляет силу, сформированную вследствие возвратно-поступательного движения перемещающихся частей, включающих в себя поршни. Если в случае трехцилиндрового двигателя несбалансированный продольный момент формируется вследствие пары сил первого порядка, сформированных при возвратно-поступательном движении перемещающихся частей, включающих в себя поршни, продольная вибрация двигателя может быть уменьшена посредством добавления противовеса к уравновешивающей массе, например, так, чтобы формировать продольный момент, который имеет фазу, обратную относительно фазы несбалансированного продольного момента. Тем не менее, хотя продольная вибрация подавляется, формируется вибрация относительно вертикальной оси, и двигатель 1 подвергается, так называемому, прецессионному движению.
Если теперь уравновешивающий вес регулируется (см. сплошную линию на фиг.5, как будет описано далее) таким образом, чтобы уравнивать продольный момент, сформированный посредством двигателя 1a, т.е. компонент Mv пары сил первого порядка, сформированный посредством двигателя 1a, ориентированный в продольном направлении по оси коленчатого вала, с моментом относительно вертикальной оси, сформированным посредством двигателя, т.е. с компонентом Mн пары сил первого порядка, сформированным посредством двигателя 1a, ориентированным в направлении относительно вертикальной оси по оси коленчатого вала, то устанавливается уравнение Mv/Mv0=0,5, как показано на фиг.3, что улучшает вибрационное смещение двигателя 1a. Mv0 является суммой продольного момента Mv и момента Mн относительно вертикальной оси (т.е. Mv0=Mv+Mн).
Хотя в варианте осуществления, принимая во внимание, что условие Kv>Kн задается и Hv>Hн, в общем, удовлетворяется, дополнительное уменьшение вибрации транспортного средства реализуется посредством задания уравновешивающего веса системы коленчатого вала (т.е. коленчатого вала и частей, которые поворачиваются в качестве неразъемного блока с коленчатым валом) таким образом, что вибрация относительно вертикальной оси двигателя 1a превышает продольную вибрацию.
Более конкретно, как показано на фиг.4, из противовесов 3 дополнительные веса 31 и 33 добавляются к противовесам 3, соответствующим цилиндрам #1 и #3 двигателя, и пары уравновешивающих масс 6 и 7, составляющих часть уравновешивающего веса, соответственно, предоставляются на шкиве 4 коленчатого вала и ведущем диске 5, которые поворачиваются в качестве неразъемного блока с коленчатым валом 2, так что устанавливается 0<Mv/Mv0<0,5. Следует отметить, что в варианте осуществления дополнительные веса 31 и 33 и уравновешивающие массы 6 и 7 размещаются в положениях, смещенных на 90 градусов относительно фазы поворота цилиндра #2 при повороте коленчатого вала 2, и дополнительные веса 31 и 33 и уравновешивающие массы 6 и 7 размещаются в положениях, отстоящих друг от друга на 180 градусов с точки зрения угла поворота коленчатого вала.
Таким образом, даже если вибрация относительно вертикальной оси становится выше продольной вибрации, как показано на фиг.5 (см. пунктирную линию на фиг.5), ускорение от вибрации днища транспортного средства, вызываемое посредством вибрации через опору 10A двигателя, уменьшается в целом, как видно из фиг.6. Другими словами, посредством регулирования дополнительных весов 31 и 33 и уравновешивающих масс 6 и 7, соединенных со шкивом 4 коленчатого вала и ведущим диском 5 таким образом, что они задают момент относительно вертикальной оси, превышающий продольный момент, сформированный посредством двигателя 1a, вибрация транспортного средства может быть уменьшена в целом при ограничении увеличения уравновешивающего веса. Вследствие этого, в частности, уровень вибрации транспортного средства во время холостого хода двигателя может быть уменьшен. Поскольку пара сил первого порядка, сформированная посредством двигателя, является силой, которая формируется посредством инерционной силы перемещающихся частей, включающих в себя поршни, вибрация кузова транспортного средства во время холостого хода не изменяется в значительной степени за счет частоты вращения двигателя. Тем не менее, чувствительность человека к вибрации становится высокой по мере того, как частота вибрации становится низкой (т.е. частота вращения двигателя становится низкой). Соответственно, посредством уменьшения уровня вибрации кузова транспортного средства на холостом ходу транспортного средства становится возможным уменьшать частоту вращения двигателя во время холостого хода, и, таким образом, становится возможным улучшать расход топлива во время холостого хода. Линия Vv по фиг.6 иллюстрирует ускорение от вибрации днища транспортного средства, являющееся результатом вибрации, которая вызывается посредством продольного момента, сформированного посредством двигателя 1a и передаваемого через опору 10A двигателя, и линия Vн чертежа иллюстрирует ускорение от вибрации днища транспортного средства, являющееся результатом вибрации, которая вызывается посредством момента относительно вертикальной оси, сформированного посредством двигателя 1a и передаваемого через опору 10A двигателя.
При условии теперь, что смещение в вертикальном направлении опоры 10A двигателя, вызываемое посредством продольного момента, сформированного посредством двигателя 1a, представляется посредством Xv, а смещение в продольном направлении опоры 10A двигателя, вызываемое посредством момента относительно вертикальной оси, сформированного посредством двигателя 1a, представляется посредством Xн, значения Vv и Vн выражаются посредством Vv=Xv×Kv×Hv и Vн=Xн×Kн×Hн. Поскольку Kv>Kн и Hv>Hн удовлетворяются, реакция на ускорение от вибрации днища транспортного средства является более высокой относительно смещения Xv в вертикальном направлении опоры 10A двигателя, чем относительно смещения Xн в продольном направлении опоры двигателя. Соответственно, как видно из фиг.6, значение Vv, возникающее, когда Mv/Mv0=1 (т.е. Mн=0), превышает значение Vн, возникающее, когда Mv/Mv0=0 (т.е. Mv=0). Соответственно, как видно из фиг.6, ускорение Vv+Vн от вибрации днища транспортного средства, которое является результатом вибрации, которая вызывается посредством продольного момента и момента относительно вертикальной оси, сформированных посредством двигателя 1a и передаваемых через опору 10A двигателя, демонстрирует минимальное значение в диапазоне 0<Mv/Mv0<0,5 и меньше в этом диапазоне, чем в диапазоне 0,5≤Mv/Mv0≤1.
Что касается ускорения от вибрации днища транспортного средства, являющегося результатом вибрации, которая вызывается посредством продольного момента и момента относительно вертикальной оси, сформированных посредством двигателя 1a и передаваемых через опору 10B двигателя, то же можно сказать при пояснении касательно ускорения от вибрации днища транспортного средства, вызываемого посредством вибрации, передаваемой через опору 10A двигателя, и ускорения Vv+Vн от вибрации днища транспортного средства, вызываемого посредством вибрации, передаваемой через опору 10B двигателя, демонстрирует минимальное значение в диапазоне 0<Mv/Mv0<0,5 и меньше в этом диапазоне, чем в диапазоне 0,5≤Mv/Mv0≤1. Соответственно, когда уравновешивающие массы шкива 4 коленчатого вала и ведущего диска 5 регулируются таким образом, что они задают момент относительно вертикальной оси, превышающий продольный момент, сформированный посредством двигателя 1a (т.е. 0<Mv/Mv0<0,5), вибрация днища транспортного средства может быть уменьшена посредством задания жесткости пружины, по меньшей мере, только одной из опор 10A и 10B двигателя так, что Kv>Kн. Когда обе жесткости пружины задаются так, что Kv>Kн, преимущество уменьшения вибрации днища транспортного средства может дополнительно повышаться.
Затем значение Mv/Mv0 при минимальном значении (или наименьшем значении) Vv+Vн извлекается. Если вибрационное угловое ускорение в продольном направлении коленчатого вала, вызываемое посредством вибрации двигателя, амплитуда угла вибрации и угловая скорость поворота коленчатого вала представляются посредством Av, Yv и ω, соответственно, и момент инерции в продольном направлении по оси коленчатого вала и момент инерции в направлении относительно вертикальной оси коленчатого вала представляются посредством Iv и Iн, соответственно, то значение Av представляется посредством следующего уравнения (1):

Поскольку значение Av является значением, предоставляемым посредством различения Yv два раза во времени, значение Yv выражается посредством следующего уравнения (2):

Из уравнений (1) и (2) значение Yv выражается посредством следующего уравнения (3):

Когда теперь расстояние от центра тяжести модуля 1 двигателя до опоры 10A двигателя при просмотре спереди транспортного средства представляется посредством L, значение Xv выражается посредством следующего уравнения (4):

Из уравнений (3) и (4) значение Xv выражается посредством следующего уравнения (5):
Поскольку Vv=Xv×Kv×Hv, как упомянуто выше, следующие уравнения извлекаются на основе этого уравнения и уравнения (5), а именно Vv=a×Mv×Kv×Hv/Iv и Mv=(Vv×Iv)/(a×Kv×Hv). Аналогично этому Mн=(Vн×Iн)/(a×Kн×Hн) извлекается.
Соответственно, значение Mv/Mv0 представляется посредством следующего уравнения (6):

Поскольку уравнение Vv=Vн устанавливается, когда значение Vv+Vн показывает наименьшее значение (или минимальное значение), значение Mv/Mv0 в это время представляется посредством следующего уравнения (7):

Хотя выше извлекается значение Mv/Mv0, которое приводит к минимальному значению ускорения Vv+Vн от вибрации днища транспортного средства, являющегося результатом вибрации, которая вызывается посредством продольного момента и момента относительно вертикальной оси, сформированных посредством двигателя 1a и передаваемых через опору 10A двигателя, идентичный вывод может быть сделан касательно ускорения от вибрации днища транспортного средства, являющегося результатом вибрации, передаваемой через опору 10B двигателя.
В вышеуказанном варианте осуществления веса дополнительных весов 31 и 33 и веса уравновешивающих масс 6 и 7, соответственно, предоставляемых на шкиве 4 коленчатого вала и ведущем диске 5, задаются так, что они устанавливают неравенство 0<Mv/Mv0<0,5. Таким образом, по мере того, как веса таких весовых элементов увеличиваются, значение Mv/Mv0 уменьшается, и, таким образом, как видно из фиг.7, если в опоре 10A двигателя или опоре 10B двигателя веса дополнительных весов 31 и 33 и веса уравновешивающих масс 6 и 7, предоставляемых на шкиве 4 коленчатого вала и ведущем диске 5, задаются так, что они устанавливают неравенство (IvKнHн)/(IнKvHv+IvKнHн)≤Mv/Mv0<0,5, то можно уменьшать вибрацию днища транспортного средства с помощью относительно небольшого числа уравновешивающих масс.
Как видно из фиг.8, если значение Mv/Mv0 задается равным значению (IvKнHн)/(IнKvHv+IvKнHн) в опоре 10A двигателя, то вибрация, передаваемая к днищу транспортного средства через опору 10A двигателя, минимизируется, а если значение Mv/Mv0 задается равным значению (IvKнHн)/(IнKvHv+IvKнHн) в опоре 10B двигателя, то вибрация, передаваемая к днищу транспортного средства через опору 10B двигателя, минимизируется. Соответственно, если веса уравновешивающих масс 6 и 7, соответственно, соединенных со шкивом 4 коленчатого вала и ведущим диском 5, задаются так, что они заставляют значение Mv/Mv0 принимать значение между значением (IvKнHн)/(IнKvHv+IvKнHн), соответствующим опоре 10A двигателя, и значением (IvKнHн)/(IнKvHv+IvKнHн), соответствующим опоре 10B двигателя, то вибрация днища транспортного средства может быть дополнительно уменьшена.
В вышеуказанном варианте осуществления противовесы 3 и две уравновешивающих массы 6 и 7, предоставляемые на шкиве 4 коленчатого вала и ведущем диске 5, соответственно, выполнены с возможностью регулирования уравновешивающего веса двигателя 1a. Тем не менее, если требуется, как видно из фиг.9, уравновешивающий вес двигателя 1a, аналогично уравновешивающему весу, поясненному выше, может достигаться посредством размещения уравновешивающих масс 8 и 9 на коленчатом валу в положениях цилиндра #1 и цилиндра #3, соответственно. В этом случае также две уравновешивающих массы 8 и 9 размещаются в наклонных положениях, смещенных на 90 градусов относительно фазы поворота цилиндра #2 при повороте коленчатого вала 2, и уравновешивающие массы 8 и 9 отстоят друг от друга на 180 градусов с точки зрения угла поворота коленчатого вала. Вместо размещения уравновешивающих масс 8 и 9, дополнительные веса 31 и 33 могут иметь больший размер, что приводит к идентичным преимуществам. Следует отметить, что фиг.9 показывает трехцилиндровый двигатель, порядок работы цилиндров которого следующий: цилиндр #1 - цилиндр #2 - цилиндр #3.
В вышеуказанном варианте осуществления дополнительное уменьшение вибрации транспортного средства достигается посредством предоставления уравновешивающих масс и дополнительных весов таким образом, чтобы регулировать уравновешивающий вес, который составляет модуль смягчения вибрации. Тем не менее, уравновешивающий вес также может регулироваться посредством других вариантов осуществления, которые поясняются далее. В других вариантах осуществления, которые поясняются далее, элементы, которые являются идентичными элементам, описанным в вышеуказанном варианте осуществления, обозначаются посредством одинаковых ссылочных позиций и повторное пояснение относительно элементов опускается.
В трехцилиндровом двигателе внутреннего сгорания, оснащенном механической коробкой передач (не показана) согласно второму варианту осуществления настоящего изобретения, который показывается на фиг.10, маховик 20, предоставляемый на одном конце коленчатого вала 2, имеет два сквозных отверстия 21 и 21, которые формируются рядом друг с другом на боковой поверхности периферийной части маховика, отстоят друг от друга в направлении вдоль окружности маховика 20 и имеют равные диаметры. Таким образом, часть маховика 20, в которой отверстия 21 и 21 предоставляются, имеет меньший вес, тем самым обеспечивая преимущества, идентичные преимуществам, которые получаются, если уравновешивающие массы предоставляются в положениях, отстоящих на расстояние 180 градусов по углу поворота коленчатого вала от отверстий 21 и 21. Т.е. во втором варианте осуществления регулирование модуля смягчения вибрации достигается посредством предоставления отверстий в системе коленчатого вала (т.е. в коленчатом валу и частях, которые поворачиваются в качестве неразъемного блока с коленчатым валом).
Во втором варианте осуществления шкив 4 коленчатого вала, обеспечиваемый на другом конце коленчатого вала 2, является литой частью, и выступающая внутрь пластинчатая уравновешивающая масса 41 формируется неразъемным образом на внутренней поверхности шкива 4 коленчатого вала, когда шкив 4 коленчатого вала является литым.
Среднее положение между уравновешивающей массой 41, обеспечиваемой в шкиве 4 коленчатого вала, и отверстиями 21 и 21, обеспечиваемыми в маховике 20, размещается в положении, смещенном на 90 градусов относительно фазы поворота цилиндра #2 при повороте коленчатого вала 2, и среднее положение между уравновешивающей массой 41 и отверстиями 21 и 21 является положением, с точки зрения угла поворота коленчатого вала, идентичным положению, в котором предоставляются дополнительные веса 31.
Хотя в вышеуказанном втором варианте осуществления отверстия 21 являются сквозными отверстиями, которые проходят через маховик 20, отверстия 21 необязательно должны проходить через маховик 20. Т.е. выемка или другая конструкция может быть использована при условии, что она уменьшает вес. Кроме того, вместо предоставления отверстий 21 в маховике 20, болт или другой элемент, выступающий в качестве уравновешивающей массы, может соединяться с маховиком в положении, отделенном на 180 градусов, с точки зрения угла поворота коленчатого вала, от положения, в котором отверстия 21 должны формироваться.
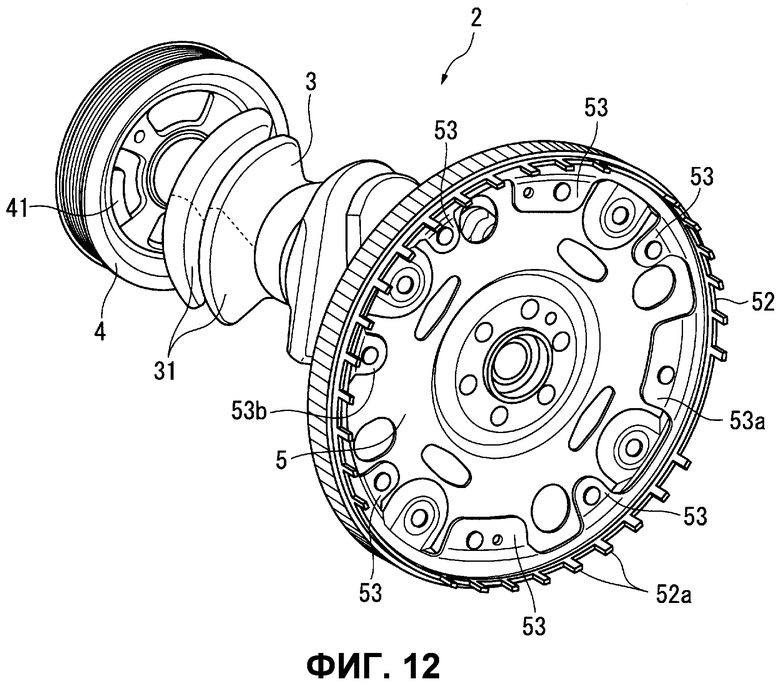
Третий вариант осуществления настоящего изобретения далее описан со ссылкой на фиг.11 и 12. В трехцилиндровом двигателе внутреннего сгорания, оснащенном автоматической трансмиссией (не показана), согласно этому третьему варианту осуществления приспособления, крепящиеся к ведущему диску 5, сконфигурированы так, чтобы иметь асимметричные формы, так что получаются преимущества, идентичные преимуществам, получаемым, когда уравновешивающие массы предоставляются на ведущем диске 5.
В этом третьем варианте осуществления сигнальная пластина 51 для определения угла поворота коленчатого вала 2 присоединена к ведущему диску 5, который обеспечивается на одном конце коленчатого вала 2. Сигнальная пластина 51 содержит кольцевую часть 52 основного корпуса, на которой множество зубьев 52a формируются с интервалами, и множество (четное число) фланцевых частей 53, которые формируются так, что они проходят перпендикулярно части 52 основного корпуса для прикрепления сигнальной пластины 51 к ведущему диску 5. Фланцевые части 53 размещаются в парах, отстоящих друг от друга на 180 градусов, с точки зрения угла поворота коленчатого вала, и формы фланцевых частей 53, составляющих каждую пару, являются идентичными, за исключением одной пары. В этой паре фланцевая часть 53a сконфигурирована так, чтобы быть больше фланцевой части 53b, спозиционированной на расстоянии 180 градусов, с точки зрения угла поворота коленчатого вала, так что фланцевая часть 53a и фланцевая часть 53b имеют различные формы. Т.е. в этом третьем варианте осуществления посредством задания форм одной пары фланцевых частей 53a и 53b, которые отстоят друг от друга на 180 градусов, с точки зрения угла поворота коленчатого вала, асимметричными получаются преимущества, идентичные преимуществам, которые получаются, если уравновешивающая масса предоставляется в положении фланцевой части 53a.
Аналогично вышеуказанному второму варианту осуществления шкив 4 коленчатого вала в третьем варианте осуществления является литой частью, и пластинчатая уравновешивающая масса 41 неразъемным образом отливается на внутренней поверхности шкива 4 коленчатого вала.
Уравновешивающая масса 41 и каждая из фланцевых частей 53a и 53b смещаются на 90 градусов относительно фазы поворота цилиндра #2 при повороте коленчатого вала 2, и уравновешивающая масса 41 и фланцевая часть 53a отстоят друг от друга на 180 градусов, с точки зрения угла поворота коленчатого вала.
В этом третьем варианте осуществления посредством задания форм спаренных фланцевых частей 53a и 53b, которые являются двумя из множества фланцев 53, предоставляемых посредством сигнальной пластины 51 и отстоящих друг от друга на 180 градусов, с точки зрения угла поворота коленчатого вала, асимметричными получаются преимущества, идентичные преимуществам, которые получаются, если уравновешивающая масса предоставляется на ведущем диске 5. Тем не менее, в случае, если форма сигнальной пластины 51, которая является приспособлением, крепящимся к ведущему диску 5, является симметричной (т.е. в случае, если все фланцевые части 53 сигнальной пластины 51 выполнены так, что фланцевые части 53, отстоящие друг от друга на 180 градусов, с точки зрения угла поворота коленчатого вала, являются симметричными), предоставление сквозного отверстия в положении, соответствующем вышеуказанной фланцевой части 53b ведущего диска 5 (т.е. в положении, которое смещается на 90 градусов относительно фазы поворота цилиндра #2 при повороте коленчатого вала 2 и является идентичным положению уравновешивающей массы 41, с точки зрения угла поворота коленчатого вала), приводит к уменьшению веса части, в которой отверстие предоставляется, и обеспечивает преимущества, идентичные преимуществам, которые получаются, если уравновешивающая масса предоставляется в положении, которое отстоит от сквозного отверстия на 180 градусов, с точки зрения угла поворота коленчатого вала.
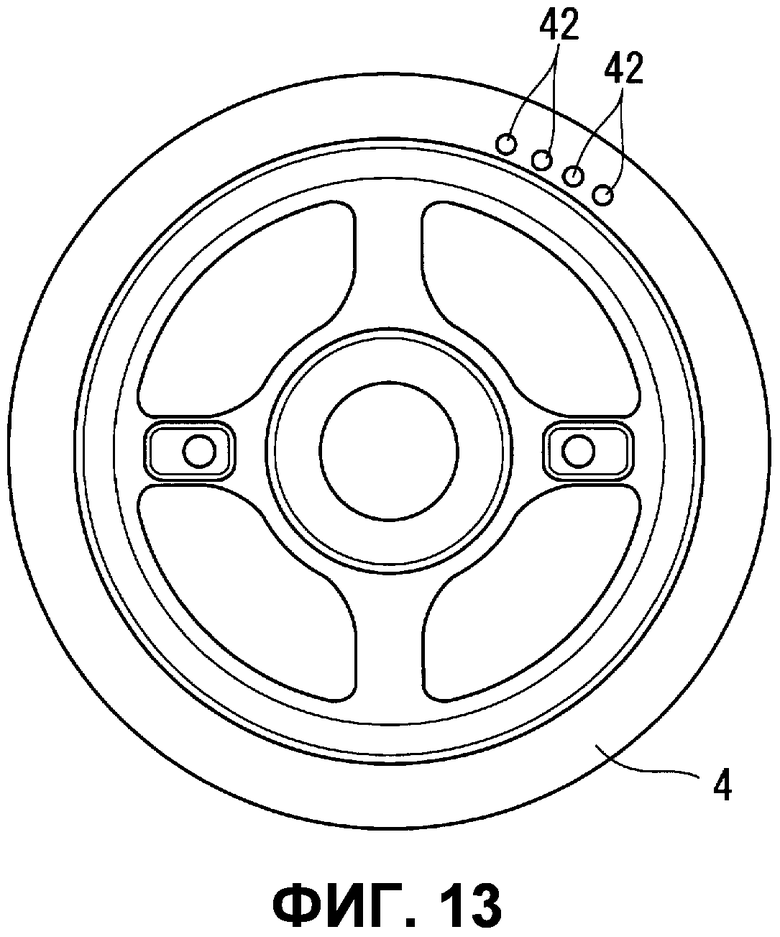
В вышеуказанных вариантах осуществления используется компоновка, в которой шкив 4 коленчатого вала содержит уравновешивающие массы. Тем не менее, как видно из фиг.13, если множество отверстий 42 предоставляется во внешней периферийной части шкива 4 коленчатого вала, то веса частей, в которых отверстия 42 предоставляются, уменьшаются, и, таким образом, без предоставления уравновешивающих масс на шкиве 4 коленчатого вала могут быть получены преимущества, идентичные преимуществам, которые получаются, если уравновешивающие массы предоставляются в частях, которые отстоят от отверстий 42 на 180 градусов, с точки зрения угла поворота коленчатого вала. Хотя выше описаны предпочтительные варианты осуществления изобретения, настоящее изобретение не ограничено такими вариантами осуществления, и различные модификации являются возможными. Например, уравновешивающие массы и отверстия могут занимать другие позиции, и число уравновешивающих масс может изменяться при условии, что они формируют идентичную силу инерции. Кроме того, уравновешивающие массы, дополнительные веса и отверстия могут принимать любую комбинацию при условии, что они формируют идентичную силу инерции. Кроме того, приемлемо использовать другую конфигурацию монтажа двигателя, например опоры двигателя могут предоставляться в передней и задней частях ассоциированного транспортного средства в дополнение к вышеуказанным опорам двигателя. Кроме того, настоящее изобретение может применяться таким же образом к трехцилиндровому двигателю, в котором порядок работы цилиндров следующий: цилиндр #1 - цилиндр #3 - цилиндр #2.





Изобретение относится к области двигателестроения, более конкретно к трехцилиндровому двигателю. Трехцилиндровый двигатель включает в себя модуль смягчения вибрации для смягчения вибраций в транспортном средстве. Три цилиндра поддерживаются посредством опор двигателя, которые размещаются на обоих концах двигателя в направлении оси коленчатого вала. При условии, что KV и KH представляют жесткости пружины одной из опор двигателя в продольном направлении и направлении относительно вертикальной оси коленчатого вала, MV и MH представляют компоненты пары сил первого порядка, которая возникает в трехцилиндровом двигателе в продольном направлении и направлении относительно вертикальной оси, и MV0 представляет сумму MV и MH, жесткости пружины опор двигателя задаются так, что KV>KH, и модуль смягчения вибрации задается так, что он удовлетворяет условию 0<MV/MV0<0,5. Технический результат заключается в снижении вибрации транспортного средства. 8 з.п. ф-лы, 13 ил.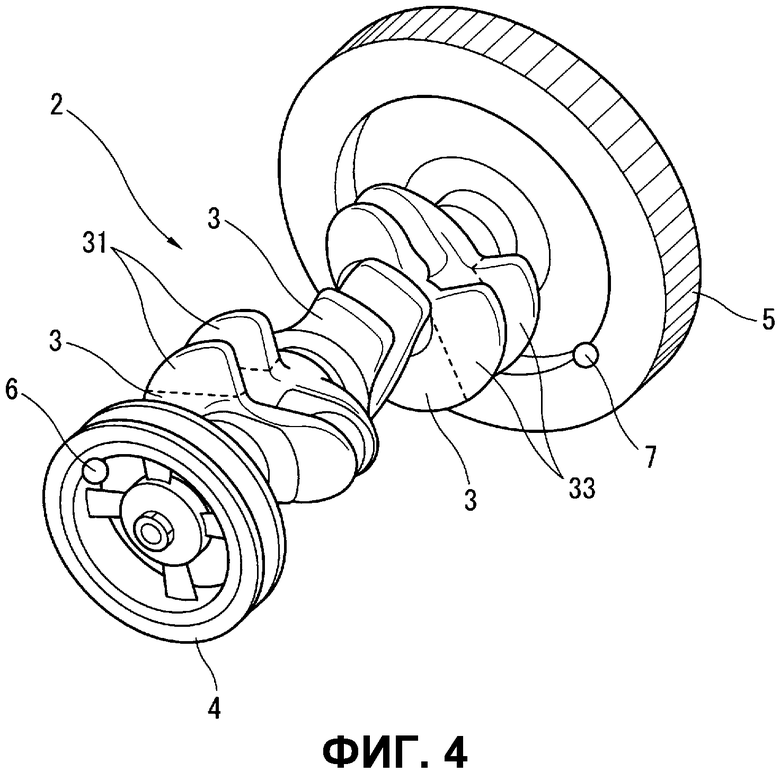
1. Трехцилиндровый двигатель, содержащий коленчатый вал, установленный с возможностью вращения, по меньшей мере, две опоры двигателя, поддерживающие трехцилиндровый двигатель на кузове транспортного средства посредством, по меньшей мере, двух опор двигателя, которые размещаются на обоих противоположных концах трехцилиндрового двигателя в направлении, которое соответствует направлению оси коленчатого вала, и модуль смягчения вибрации, расположенный на, по меньшей мере, одном из коленчатого вала и части, которая функционирует согласованно с коленчатым валом, причем первая из, по меньшей мере, двух опор двигателя задается с жесткостью KV пружины в продольном направлении по оси коленчатого вала и жесткостью пружины KH в направлении относительно вертикальной оси по оси коленчатого вала так, что устанавливается неравенство KV>KH, при этом модуль смягчения вибрации задается относительно, по меньшей мере, одного из коленчатого вала и упомянутой части так, что модуль смягчения вибрации удовлетворяет уравнению 0<MV/MV0<0,5, причем MV представляет собой компонент пары сил первого порядка пары, создаваемый посредством трехцилиндрового двигателя в продольном направлении по оси коленчатого вала, MH представляет собой компонент пары сил первого порядка, создаваемый посредством трехцилиндрового двигателя в направлении относительно вертикальной оси по оси коленчатого вала, и MV0 представляет собой сумму компонентов MV и MH пары сил первого порядка.
2. Трехцилиндровый двигатель по п.1, в котором модуль смягчения вибрации задает весовую балансировку, по меньшей мере, одного из коленчатого вала и упомянутой части так, что она удовлетворяет упомянутому уравнению.
3. Трехцилиндровый двигатель по п.1 или 2, в котором вторая из, по меньшей мере, двух опор двигателя, которая расположена на противоположном конце трехцилиндрового двигателя от первой из, по меньшей мере, двух опор двигателя, задается с жесткостью KV2 пружины в продольном направлении по оси коленчатого вала и жесткостью KH2 пружины в направлении относительно вертикальной оси по оси коленчатого вала так, что устанавливается неравенство KV2>KH2.
4. Трехцилиндровый двигатель по п.3, в котором первая из, по меньшей мере, двух опор двигателя задается так, что она имеет реакцию HV передачи в продольном направлении по оси коленчатого вала и реакцию HH передачи в направлении относительно вертикальной оси по оси коленчатого вала, из реакций передачи вибрации, передаваемой к днищу транспортного средства через первую из, по меньшей мере, двух опор двигателя, причем трехцилиндровый двигатель является частью модуля двигателя, который дополнительно включает в себя трансмиссию и части, соединенные с трехцилиндровым двигателем и трансмиссией, при этом модуль двигателя создает момент инерции IV модуля двигателя в продольном направлении по оси коленчатого вала и момент инерции IH модуля двигателя в направлении относительно вертикальной оси по оси коленчатого вала, причем модуль смягчения вибрации дополнительно задается так, что он удовлетворяет условию уравнения (IVKHHH)/(IHKVHV+IVKHHH)≤MV/MV0<0,5.
5. Трехцилиндровый двигатель по п.1 или 2, в котором первая из, по меньшей мере, двух опор двигателя задается так, что она имеет реакцию HV передачи в продольном направлении по оси коленчатого вала и реакцию HH передачи в направлении относительно вертикальной оси по оси коленчатого вала, из реакций передачи вибрации, передаваемой к днищу транспортного средства через первую из, по меньшей мере, двух опор двигателя, причем трехцилиндровый двигатель является частью модуля двигателя, который дополнительно включает в себя трансмиссию и части, соединенные с трехцилиндровым двигателем и трансмиссией, при этом модуль двигателя создает момент инерции IV модуля двигателя в продольном направлении по оси коленчатого вала и момент инерции IH модуля двигателя в направлении относительно вертикальной оси по оси коленчатого вала, причем модуль смягчения вибрации дополнительно задается так, что он удовлетворяет условию уравнения (IVKHHH)/(IHKVHV+IVKHHH)≤MV/MV0<0,5.
6. Трехцилиндровый двигатель по п.4, в котором модуль смягчения вибрации дополнительно задается так, что он удовлетворяет уравнению (IVKHHH)/(IHKVHV+IVKHHH)≤MV/MV0≤(IVKH2HH2)/(IHKV2HV2+IVKH2HH2).
7. Трехцилиндровый двигатель по п.1, в котором модуль смягчения вибрации содержит уравновешивающую массу, которая обеспечивается на коленчатом валу или на части, которая включает в себя модуль смягчения вибрации.
8. Трехцилиндровый двигатель по п.1, в котором модуль смягчения вибрации содержит отверстие, которое обеспечивается в, по меньшей мере, одном из коленчатого вала и упомянутой части.
9. Трехцилиндровый двигатель по п.1, в котором, по меньшей мере, две опоры двигателя размещены относительно коленчатого вала так, что коленчатый вал проходит в направлении ширины транспортного средства.
| JP 2006175894 A, 06.07.2006 | |||
| JP 2007313924 A, 06.12.2007 | |||
| Устройство для дистанционного контакторного управления электровозом | 1937 |
|
SU54120A1 |
| DE 3402100 A1, 01.08.1985. | |||

