ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта заявка притязает на приоритет Японской Заявки на Патент № 2008-270149, зарегистрированной 20 октября 2008 года. Таким образом, полное описание японской заявки на патент № 2008-270149 включено в этот документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится в целом к многозвенному двигателю. Более конкретно, настоящее изобретение относится к конструкции, уменьшающей вибрацию, которая уменьшает вибрацию в многозвенном двигателе.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Были разработаны двигатели, в которых поршневой палец и шатунная шейка соединены множеством звеньев (такие двигатели в дальнейшем в этом документе называются многозвенными двигателями). Например, многозвенный двигатель описан в японской опубликованной публикации патента № 2006-207634. Многозвенный двигатель этой публикации патента предусмотрен с верхним звеном и нижним звеном для присоединения поршня к коленчатому валу. Верхнее звено присоединено поршневым пальцем к поршню, который совершает возвратно-поступательное перемещение внутри цилиндра. Нижнее звено прикреплено с возможностью вращения к шатунной шейке и присоединено к верхнему звену пальцем верхнего звена. Степень сжатия многозвенного двигателя управляется с возможностью изменения посредством управления ориентацией нижнего звена. Многозвенный двигатель также имеет управляющее звено с одним концом, присоединенным к нижнему звену, и с другим концом, присоединенным к эксцентриковой части управляющего вала. Ориентация нижнего звена управляется через управляющее звено посредством изменения угла поворота управляющего вала.
Ввиду упомянутого выше, специалистам в данной области техники из этого описания будет понятно, что существует необходимость в улучшенном многозвенном двигателе, который уменьшает вибрацию в многозвенном двигателе. Это изобретение направлено на решение этой задачи в данной области техники, а также на другие задачи, которые будут понятны специалистам в данной области техники из этого описания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Было обнаружено, что с многозвенным двигателем, описанным выше, вибрации случаются не только в направлении перемещения поршня, но также и в направлении, ориентированном поперечно относительно направления перемещения поршня (то есть в направлении, ориентированном поперечно налево и направо относительно направления перемещения поршня, при взгляде с осевого направления коленчатого вала), из-за сил инерции звеньев. Поперечные вибрации включают в себя, например, составляющую вибрации второго порядка, исходя из частоты вращения двигателя. Проблема вибрации второго порядка является уникальной для многозвенных двигателей. Проблема вибрации второго порядка не является предметом обсуждения в двигателях, имеющих обычную конструкцию поршня и коленчатого вала, в которых поршень и коленчатый вал соединены единственным соединительным стержнем.
В этом описании порядок составляющей вибрации определен как отношение периода (обратного частоте) вибрации к количеству времени, требуемого для одного поворота двигателя (период вращения коленчатого вала). Конкретно, вибрация является составляющей вибрации первого порядка, если период вибрации является таким же, как период вращения коленчатого вала. Вибрация является составляющей вибрации второго порядка, если период вибрации является половиной периода вращения коленчатого вала, и так далее для составляющих вибрации высшего порядка.
Многозвенный двигатель, описанный в упомянутой выше публикации патента, имеет уравновешивающее устройство второго порядка, предусмотренное под коленчатым валом. Уравновешивающее устройство второго порядка уменьшает вибрации второго порядка в направлении, ориентированном диагонально относительно направления перемещения поршня, посредством вращения первого уравновешивающего вала и второго уравновешивающего вала в направлении, противоположном направлению вращения коленчатого вала. Тем не менее, с многозвенным двигателем, представленным в упомянутой выше публикации патента, стоимость увеличена необходимостью предусмотрения отдельного уравновешивающего устройства второго порядка, и эффективность использования топлива двигателя ухудшена из-за трения, вырабатываемого, когда уравновешивающее устройство второго порядка приводится в действие.
Настоящее изобретение было выполнено ввиду этих проблем. Одной целью является разработка простой конструкции, уменьшающей вибрацию, для многозвенного двигателя, которая может уменьшить вибрации в поперечно ориентированном направлении относительно направления перемещения поршня.
Ввиду упомянутого выше, разработан многозвенный двигатель, который, в основном, содержит корпус блока цилиндров, поршень, верхнее звено, нижнее звено и управляющее звено. Корпус блока цилиндров включает в себя, по меньшей мере, один цилиндр. Поршень расположен с возможностью осуществления возвратно-поступательного перемещения внутри цилиндра корпуса блока цилиндров. Верхнее звено имеет первый конец, шарнирно присоединенный к поршню поршневым пальцем. Нижнее звено установлено с возможностью вращения на шатунной шейке коленчатого вала и присоединено к второму концу верхнего звена верхним пальцем. Управляющее звено имеет первый конец, присоединенный с возможностью вращения к нижнему звену управляющим пальцем, и второй конец, шарнирно установленный на шарнирной части управляющего вала. Верхнее звено, нижнее звено и управляющее звено выполнены и расположены друг относительно друг так, что силы инерции предписанного второго или высшего порядка исходя из частоты вращения двигателя действуют, по меньшей мере, на верхнее звено и управляющее звено в поперечном направлении двигателя с суммой левосторонних и правосторонних сил инерции предписанного второго или высшего порядка, равной, по существу, нулю. Поперечное направление ориентировано поперечно налево и направо относительно направления вертикального перемещения поршня, когда многозвенный двигатель рассматривается вдоль осевого направления коленчатого вала.
Эти и другие цели, признаки, особенности и преимущества настоящего изобретения будут понятны специалистам в данной области техники из последующего подробного описания, которое, при рассмотрении с прилагаемыми чертежами, описывает предпочтительный вариант осуществления настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь обратимся к прилагаемым чертежам, которые образуют часть этого оригинального описания:
Фиг.1А представляет собой схематичный вид в вертикальном разрезе многозвенного двигателя согласно первому варианту осуществления;
Фиг.1В - схематичный вид сверху в плане многозвенного двигателя, изображенного на фиг.1А, согласно первому варианту осуществления;
Фиг.2 - схему кинематической цепи многозвенного двигателя, изображенного на фиг.1А, для вычисления суммы поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев;
Фиг.3А - вид сбоку в вертикальной проекции верхнего звена многозвенного двигателя, изображенного на фиг.1А;
Фиг.3В - вид сбоку в вертикальной проекции нижнего звена многозвенного двигателя, изображенного на фиг.1А;
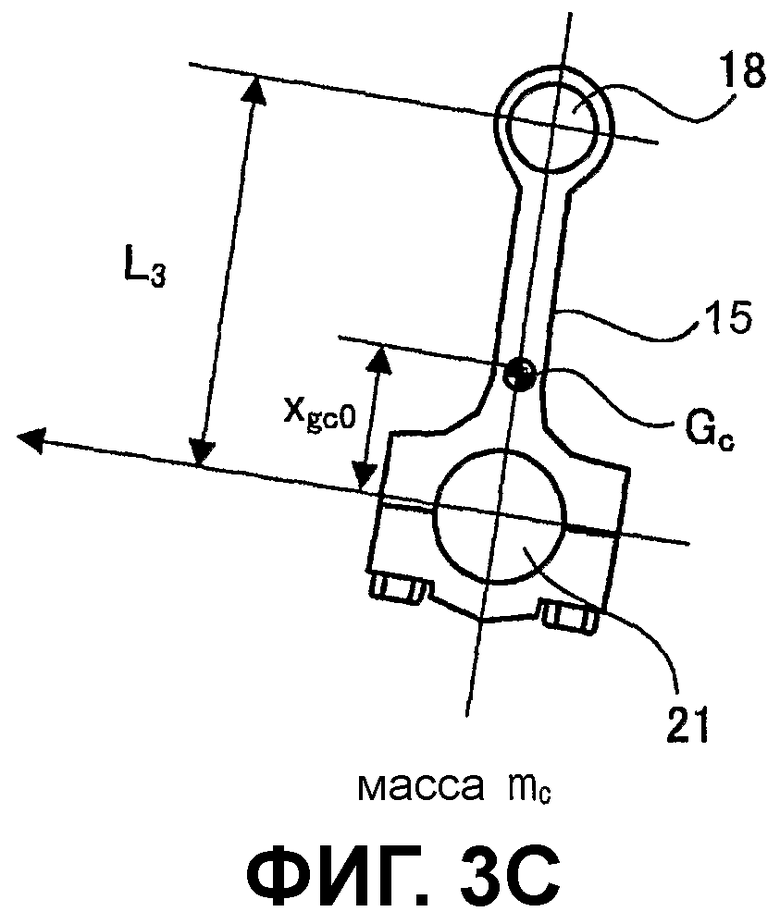
Фиг.3С - вид сбоку в вертикальной проекции управляющего звена многозвенного двигателя, изображенного на фиг.1А;
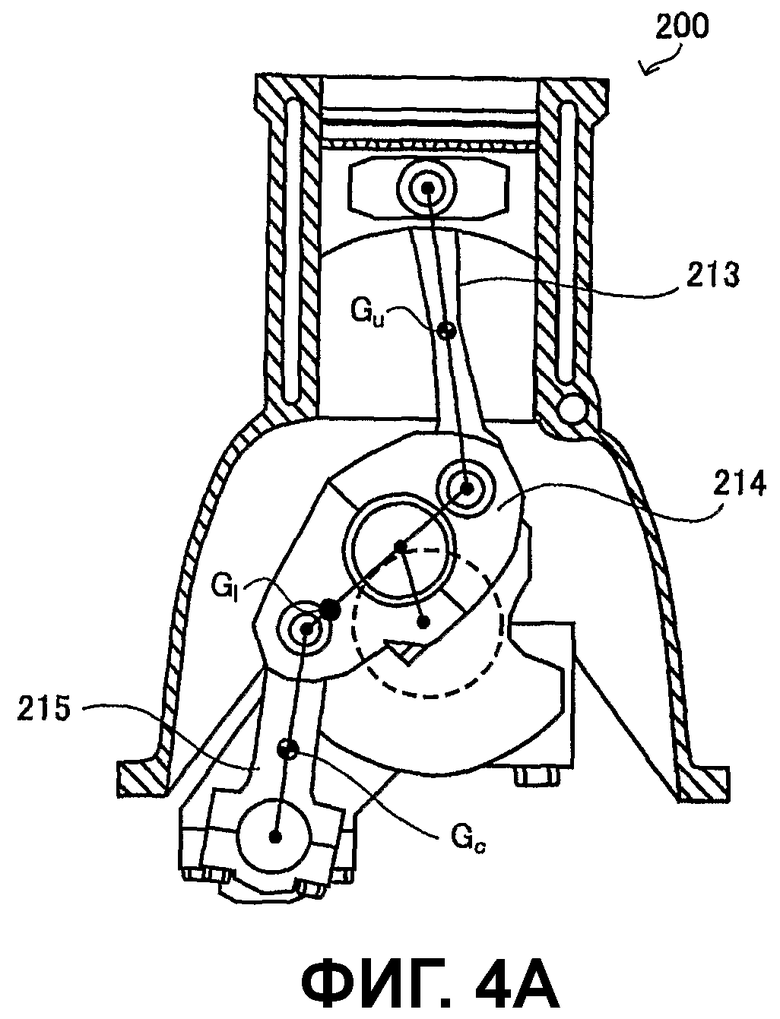
Фиг.4А - схематичный вид в вертикальном разрезе сравнительного примера многозвенного двигателя;
Фиг.4В - график поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев многозвенного двигателя в сравнительном примере на фиг.4А;
Фиг.5 - график поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев многозвенного двигателя, изображенного на фиг.1А;
Фиг.6А - вид сбоку в вертикальной проекции нижнего звена многозвенного двигателя, изображенного на фиг.1А, на котором изображен центр масс нижнего звена;
Фиг.6В - график, на котором изображено отношение между центром масс нижнего звена и движущей силой вибрации второго порядка;
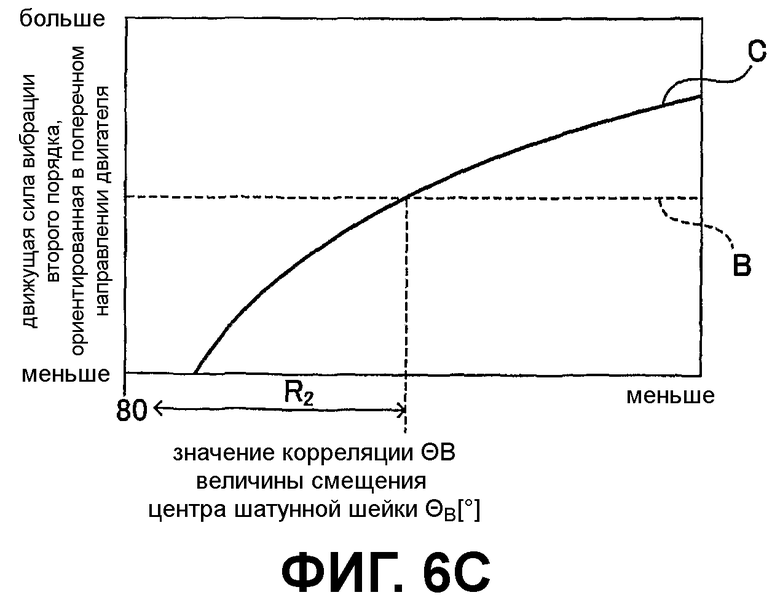
Фиг.6С - график, на котором изображено отношение между центром шатунной шейки и движущей силой вибрации второго порядка;
Фиг.7 - схематичные виды верхнего звена, нижнего звена и управляющего звена многозвенного двигателя согласно второму варианту осуществления;
Фиг.7А - вид сбоку в вертикальной проекции верхнего звена многозвенного двигателя согласно второму варианту осуществления;
Фиг.7В - вид сбоку в вертикальной проекции нижнего звена многозвенного двигателя согласно второму варианту осуществления;
Фиг.7С - вид сбоку в вертикальной проекции управляющего звена многозвенного двигателя согласно второму варианту осуществления;
Фиг.8 - схематичный вид в вертикальном разрезе многозвенного двигателя согласно третьему варианту осуществления;
Фиг.9 - график поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев многозвенного двигателя, изображенного на фиг.8;
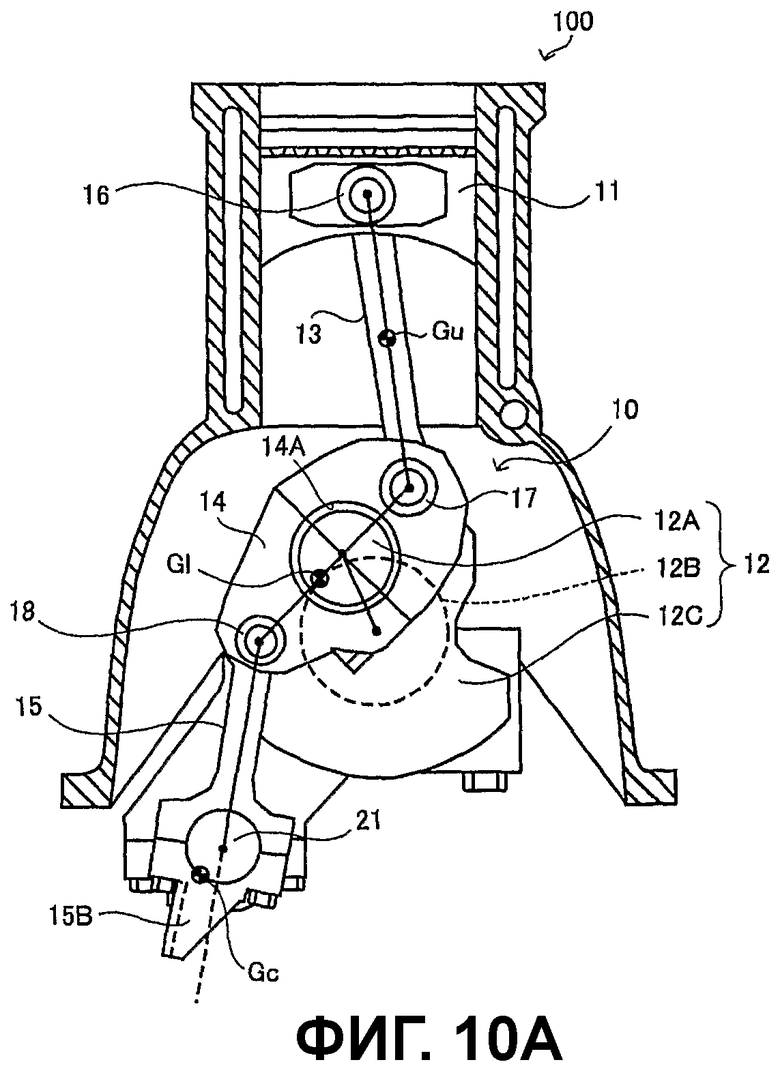
Фиг.10 - схематичный вид в вертикальном разрезе многозвенного двигателя согласно четвертому варианту осуществления;
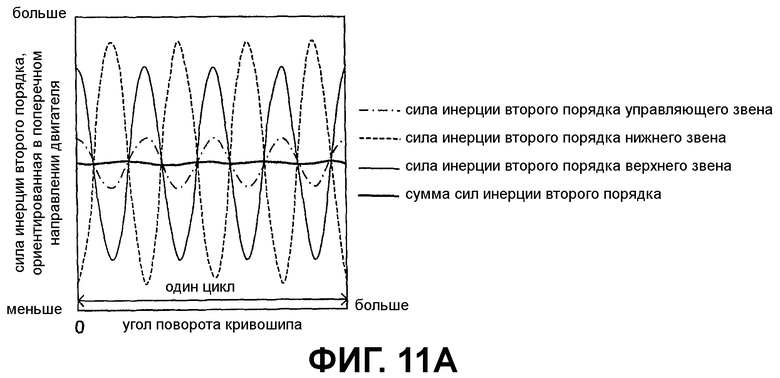
Фиг.11А - график поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев многозвенного двигателя, изображенного на фиг.10; и
Фиг.11В - график вертикально ориентированных сил инерции второго порядка, действующих в центрах масс звеньев многозвенного двигателя, изображенного на фиг.10.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Далее будут объяснены выбранные варианты осуществления настоящего изобретения со ссылкой на чертежи. Специалистам в данной области техники из этого описания будет понятно, что последующие описания вариантов осуществления настоящего изобретения предусмотрены только для иллюстрирования и не для ограничения изобретения, как определено в прилагаемой формуле изобретения и в ее эквивалентах.
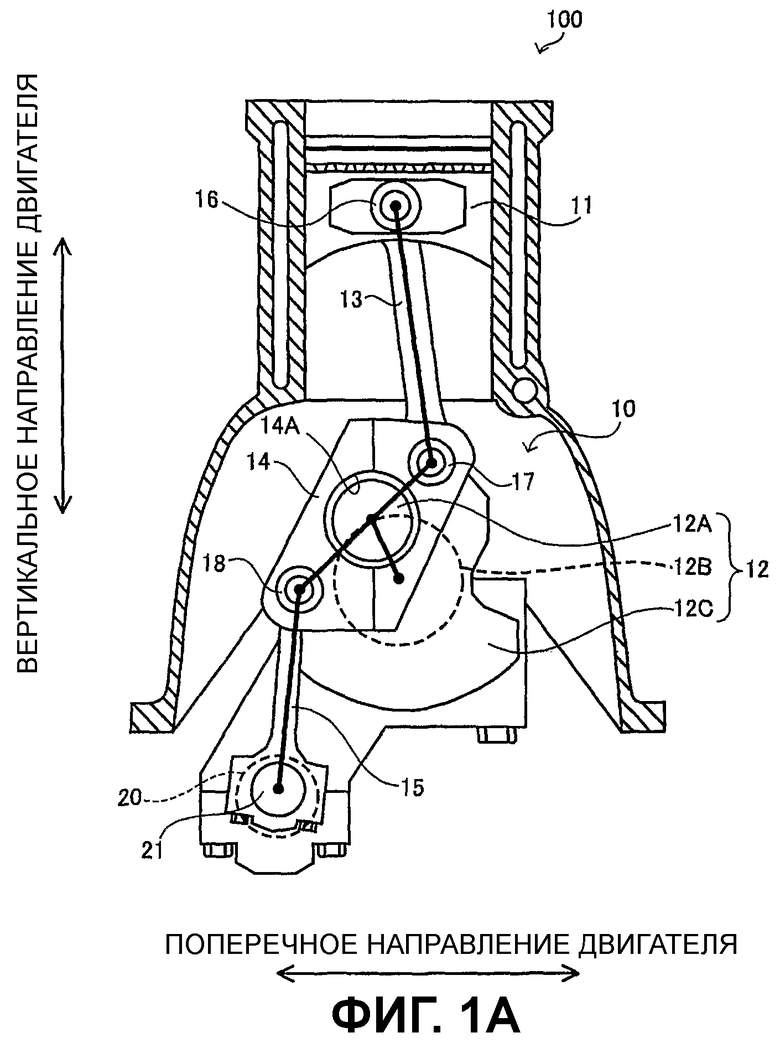
Сначала обратимся к фиг.1А и 1В, на которых изображены выбранные части многозвенного двигателя 100 согласно первому варианту осуществления. В этом проиллюстрированном варианте осуществления многозвенный двигатель 100 представляет собой четырехцилиндровый рядный двигатель транспортного средства. Тем не менее, для краткости будет изображен только один цилиндр. Каждый из цилиндров многозвенного двигателя 100 оснащен соответствующим механизмом 10 изменения степени сжатия, выполненным с возможностью изменения степени сжатия посредством изменения положения верхней мертвой точки поршня. Многозвенный двигатель 100 также включает в себя поршень 11 для каждого цилиндра и коленчатый вал 12, причем механизмы 10 изменения степени сжатия присоединяют поршни 11 к коленчатому валу 12. Коленчатый вал 12 включает в себя шатунную шейку 12А, шейку 12В и противовес 12С для каждого из поршней 11. Центральная ось шатунной шейки 12А смещена от центральной оси шейки 12В на заданную величину. Противовес 12С образован как единое целое с плечом кривошипа и служит для уменьшения составляющей вибрации первого порядка поршня 11 исходя из частоты вращения двигателя.
Механизм 10 изменения степени сжатия включает в себя верхнее звено 13, нижнее звено 14 и управляющее звено 15. Верхнее звено 13 и нижнее звено 14 выполнены с возможностью присоединения поршня 11 к коленчатому валу 12. Механизм 10 изменения степени сжатия выполнен с возможностью изменения степени сжатия посредством использования управляющего звена 15 для управления ориентацией нижнего звена 14. Верхний (первый) конец верхнего звена 13 присоединен к поршню 11 поршневым пальцем 16. Нижний (второй) конец верхнего звена 13 присоединен к одному концу нижнего звена 14 верхним пальцем 17. Другой конец нижнего звена 14 присоединен к управляющему звену 15 управляющим пальцем 18.
Нижнее звено 14 предусмотрено с соединительным отверстием 14А для поддерживания нижнего звена 14 на шатунной шейке 12А коленчатого вала 12. Соединительное отверстие 14А расположено в таком положении, что шатунная шейка 12А расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18. Нижнее звено 14 включает в себя два элемента (левосторонний элемент и правосторонний элемент, как видно из фиг.1А), которые могут быть отделены друг от друга. Нижнее звено 14 выполнено так, что соединительное отверстие 14А расположено, примерно, в середине нижнего звена 14 между левосторонним элементом и правосторонним элементом. Шатунная шейка 12А коленчатого вала 12 расположена в соединительном отверстии 14А так, что нижнее звено 14 поворачивается вокруг шатунной шейки 12А.
Верхний (первый) конец управляющего звена 15 присоединен с возможностью вращения к нижнему звену 14 управляющим пальцем 18. Нижний (второй) конец управляющего звена 15 присоединен к эксцентриковой части 21 вала управляющего вала 20. Эксцентриковая часть 21 вала составляет ось поворота управляющего вала 20. Управляющее звено 15 поворачивается вокруг эксцентриковой части 21 вала. Управляющий вал 20 поддерживается с возможностью вращения в корпусе блока цилиндров, который включает в себя множество (четыре) цилиндров, соответствующее количеству поршней. Управляющий вал 20 выполнен так, чтобы быть параллельным коленчатому валу 12. Эксцентриковая часть 21 вала предусмотрена в таком положении, что центральная ось эксцентриковой части 21 вала смещена от центральной оси управляющего вала 20 на заданную величину. Эксцентриковая часть 21 вала перемещается посредством вращательного управления управляющим валом 20 посредством привода (не изображен).
Когда привод (не изображен) вращает управляющий вал 20 так, что эксцентриковая часть 21 вала перемещается вниз относительно центральной оси управляющего вала 20, нижнее звено 14 поворачивается вокруг шатунной шейки 12А так, что положение верхнего пальца 17 перемещается вверх. В результате этого поршень 11 перемещается вверх, и степень сжатия многозвенного двигателя 100 увеличивается. Наоборот, когда эксцентриковая часть 21 вала перемещается вверх относительно центральной оси управляющего вала 20, нижнее звено 14 поворачивается вокруг шатунной шейки 12А так, что положение верхнего пальца 17 перемещается вниз. В результате этого поршень 11 перемещается вниз, и степень сжатия многозвенного двигателя 100 уменьшается.
Когда многозвенный двигатель 100 работает в области большой нагрузки, степень сжатия многозвенного двигателя 100 устанавливается, например, на более низкую степень сжатия независимо от скорости двигателя для предотвращения детонации. Наоборот, когда многозвенный двигатель 100 работает в области нагрузки от низкой до средней, где риск детонации является малым, степень сжатия устанавливается на более высокую степень сжатия для увеличения отдаваемой мощности двигателя.
Сумма сил инерции, прилагаемых верхним звеном 13, нижним звеном 14 и управляющим звеном 15 многозвенного двигателя 100, действует как движущая сила вибрации, заставляющая корпус двигателя вибрировать как в направлении перемещения поршня (вертикальном направлении двигателя), так и в направлении, ориентированном поперечно относительно направления перемещения поршня (направления двигателя налево и направо). Поперечно ориентированные вибрации двигателя включают в себя, например, составляющую вибрации второго порядка и составляющие вибрации высшего порядка, относящиеся к частоте вращения двигателя, как описано выше (то есть порядок вибрации определен исходя из доли периода вращения коленчатого вала). Такие вибрации второго и высшего порядка являются специфическими для многозвенных двигателей.
В этом варианте осуществления воздействие вибраций первого порядка в поперечном направлении двигателя 100 является маленьким, так как многозвенный двигатель 100 является четырехцилиндровым двигателем. Следовательно, целью является уменьшение вибраций второго и высшего порядка. Особенно необходимо уменьшить поперечные вибрации второго порядка, которые вызывают приглушенный шум внутри кабины транспортного средства. Следовательно, в этом многозвенном двигателе 100 масса и форма каждого из звеньев 13-15 и устройство звеньев 13-15 сконфигурированы и выполнены для распределения друг относительно друга сил инерции предписанного второго или высшего порядка (исходя из частоты вращения двигателя), действующих в поперечном направлении двигателя в центрах масс верхнего звена 13, нижнего звена 14 и управляющего звена 15, так, чтобы сумма сил инерции предписанного порядка, действующих в направлении налево, по существу, была равна сумме сил инерции предписанного порядка, действующих в направлении направо.
Фиг.2 представляет собой схему кинематической цепи многозвенного двигателя 100 для вычисления суммы поперечно ориентированных сил инерции второго порядка, действующих в центрах масс звеньев. На фиг.2 установлена декартова система координат, имеющее начало координат (0,0), расположенное в центре вращения коленчатого вала 12, ось Х, ориентированную вдоль поперечного направления двигателя 100, и ось Y, ориентированную вдоль вертикального направления вдоль оси возвратно-поступательного движения поршней 11 двигателя 100.
Как видно из фиг.2, центральная ось поршневого пальца 16 расположена в положении (х3, y3), центральная ось верхнего пальца 17 расположена в положении (х4, y4), центральная ось шатунной шейки 12А расположена в положении (х1, y1), центральная ось управляющего пальца 18 расположена в положении (х2, y2), и центральная ось эксцентриковой части 21 вала управляющего вала 20 расположена в положении (хс, yc).
Верхнее звено 13 имеет массу mu и длину L6 между центральной осью поршневого пальца 16 и центральной осью верхнего пальца 17. Центр масс Gu верхнего звена 13 расположен на или рядом с линией, проходящей через центральную ось поршневого пальца 16 и центральную ось верхнего пальца 17, но для простоты предполагается, что центр масс Gu верхнего звена 13 расположен в точке вдоль сегмента линии, соединяющего центральную ось поршневого пальца 16 и центральную ось верхнего пальца 17. Расстояние xgu0 существует между центральной осью поршневого пальца 16 и центром масс Gu верхнего звена 13. Расстояние xgu0 определено как положительное на стороне верхнего пальца центральной оси поршневого пальца 16 и как отрицательное на противоположной стороне центральной оси поршневого пальца 16.
Нижнее звено 14 имеет массу ml и длину L4 между центром верхнего пальца 17 и центральной осью шатунной шейки 12А и длину L2 между центральной осью шатунной шейки 12А и центральной осью управляющего пальца 18. Как упомянуто выше, соединительное отверстие 14А нижнего звена 14 поддерживает нижнее звено 14 на шатунной шейке 12А коленчатого вала 12. Соединительное отверстие 14А расположено в таком положении, что шатунная шейка 12А расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18. Следовательно, как центр масс Gl нижнего звена 14, так и центральная ось шатунной шейки 12А, установленной в монтажном отверстии 14А, расположены на или рядом с прямой линией, которая проходит через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Для простоты предполагается, что как центр масс Gl, так и центральная ось шатунной шейки 12А расположены в точке вдоль сегмента линии, соединяющего центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Расстояние xgl0 существует между центральной осью шатунной шейки 12А и центром масс Gl нижнего звена 14. Расстояние xgl0 определено как положительное на стороне управляющего пальца центральной оси шатунной шейки 12А и как отрицательное на стороне верхнего пальца центральной оси шатунной шейки 12А.
Управляющее звено 15 имеет массу mc и длину L3 между центральной осью управляющего пальца 18 и центральной осью эксцентриковой части 21 вала. Центр масс Gc управляющего звена 15 расположен на или рядом с линией, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала, но для простоты предполагается, что центр масс Gc управляющего звена 15 расположен в точке вдоль сегмента линии, соединяющего центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала. Расстояние xgc0 существует между центральной осью эксцентриковой части 21 вала и центром масс Gc управляющего звена 15. Расстояние xgc0 определено как положительное на стороне управляющего пальца центральной оси эксцентриковой части 21 вала и как отрицательное на противоположной стороне эксцентриковой части 21 вала.
Воздействия, которые верхний палец 17 и управляющий палец 18 оказывают относительно сил инерции, могут быть приняты во внимание посредством предположения, что как верхний палец 17, так и управляющий палец 18 составляют часть одного из звеньев, при определении массы и положения центра масс каждого из звеньев. Угол, образованный между осью Х и линией, проходящей через центр вращения коленчатого вала 12 и центральную ось шатунной шейки 12А, определен как угол θА поворота кривошипа.
При вычислении суммы сил инерции второго порядка и высшего порядка, действующих в поперечном направлении двигателя в центрах масс звеньев, с использованием такой модели, как описанная выше, первый этап заключается в нахождении поперечного смещения xgl центра масс Gl нижнего звена 14, поперечного смещения xgu центра масс Gu верхнего звена 13 и поперечного смещения xgc центра масс Gc управляющего звена 15.
Поперечные (направо или налево) смещения xgl, xgu и xgc центров масс звеньев выражены в уравнениях (1)-(3) ниже.

В уравнениях х2 представляет собой поперечное смещение управляющего пальца 18 и может быть разделено на смещение x2L первого порядка и смещение x2H второго и высшего порядка, как видно из уравнения (4) ниже. Как смещение x2L первого порядка, так и смещение x2H второго и высшего порядка вычисляются, основываясь на формах и других характеристиках звеньев.

Поскольку коленчатый вал 12 имеет маховик, предусмотренный на его части конца вала для подавления вращательной вибрации, поперечное смещение xl шатунной шейки 12А выражается только исходя из смещения первого порядка, и смещения x1H второго и высшего порядка являются нулевыми, как видно из уравнения (5) ниже.

Поршневой палец 16 не подвергается какому либо смещению в поперечном направлении двигателя, так как поршень 11 скользит возвратно-поступательно внутри цилиндра. Следовательно, смещение x4H второго и высшего порядка поршневого пальца 16 в поперечном направлении двигателя является нулевым, как видно из уравнения (6) ниже.

Эксцентриковая часть 21 вала перемещается, когда управляющий вал 20 вращается, но скорость перемещения эксцентриковой части 21 вала является меньшей, чем частота вращения двигателя, и эксцентриковая часть 21 вала может быть предположена неподвижной. Следовательно, смещение xcH второго и высшего порядка эксцентриковой части 21 вала в поперечном направлении двигателя является нулевым, как видно из уравнения (7) ниже.

Если пересмотреть уравнения (1)-(3), основываясь на уравнениях (4)-(7) в отношении поперечных смещений второго и высшего порядка, то смещения xglH второго и высшего порядка центра масс Gl нижнего звена 14, смещения xguH второго и высшего порядка центра масс Gu верхнего звена 13 и смещения xgcH второго и высшего порядка центра масс Gc управляющего звена 15 выражаются в уравнениях (8)-(10) ниже.

Сумма Fes сил инерции второго и высшего порядка, действующих в поперечном направлении двигателя в центрах масс звеньев, тогда выражается согласно уравнению (11) ниже, основываясь на массах ml, mu, mc звеньев и уравнениях (8)-(10). В уравнении (11) первое выражение с правой стороны обозначает силу инерции нижнего звена 14, второе выражение с правой стороны выражает силу инерции управляющего звена 15 и третье выражение с правой стороны выражает силу инерции верхнего звена 13.

Движущие силы вибрации второго и высшего порядка, действующие для вибрации корпуса двигателя в поперечном направлении двигателя, могут быть исключены, и поперечно ориентированные вибрации второго и высшего порядка могут быть подавлены посредством приведения к нулю суммы Fes поперечно ориентированных сил инерции второго и высшего порядка, выраженной уравнением (11), то есть посредством удовлетворения уравнению (12) ниже. Другими словами, поперечные вибрации могут быть подавлены посредством распределения сил инерции второго порядка, действующих в поперечном направлении двигателя 100, так, чтобы сумма сил инерции второго порядка, действующих в направлении налево, была, по существу, равна сумме сил инерции второго порядка, действующих в направлении направо.

Следовательно, в многозвенном двигателе 100 согласно этому варианту осуществления масса и форма каждого из верхнего звена 13, нижнего звена 14 и управляющего звена 15 определены так, чтобы удовлетворять уравнению (12).
На фиг.3А-3С изображен комплект звеньев 13, 14 и 15, выполненных для соответствия уравнению (12). На фиг.3А изображено верхнее звено 13. На фиг.3В изображено нижнее звено 14. На фиг.3С изображено управляющее звено 15.
Как видно из фиг.3А, верхнее звено 13 имеет массу mu и длину L6 между центральной осью поршневого пальца 16 и центральной осью верхнего пальца 17. Верхнее звено 13 представляет собой стержнеобразный элемент, имеющий пространственную форму, выполненную с возможностью быть, в целом, симметричной относительно плоскости, которая включает в себя центральную ось поршневого пальца 16 и центральную ось верхнего пальца 17. Центр масс Gu верхнего звена 13 расположен на или рядом с линией, проходящей через центральную ось поршневого пальца 16 и центральную ось верхнего пальца 17, и расположен между центральной осью поршневого пальца 16 и центральной осью верхнего пальца 17. Расстояние xgu0 существует между центральной осью поршневого пальца 16 и центром масс Gu верхнего звена 13.
Как видно из фиг.3В, нижнее звено 14 имеет массу ml, длину L4 между центральной осью верхнего пальца 17 и центральной осью шатунной шейки 12А и длину L2 между центральной осью шатунной шейки 12А и центральной осью управляющего пальца 18. Как упомянуто выше, соединительное отверстие 14А расположено в таком положении, что шатунная шейка 12А расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18 и на или рядом с линией, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Таким образом, нижнее звено 14 выполнено так, что его часть, расположенная на расстоянии от соединительного отверстия 14А к верхнему пальцу 17, по существу, симметрична его части, расположенной на расстоянии от соединительного отверстия 14А к управляющему пальцу 18, и центр масс Gl расположен на или рядом с линией, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Более конкретно, центр масс Gl нижнего звена 14 расположен на или рядом с линией, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Также центр масс Gl расположен между центральной осью управляющего пальца 18 и центральной осью шатунной шейки 12А. Расстояние xgl0 существует между центральной осью шатунной шейки 12А и центром масс Gl нижнего звена 14.
Как видно из фиг.3С, управляющее звено 15 имеет массу mc и длину L3 между центральной осью управляющего пальца 18 и центральной осью эксцентриковой части 21 вала. Управляющее звено 15 представляет собой стержнеобразный элемент, имеющий пространственную форму, выполненную с возможностью быть, в целом, симметричной относительно плоскости, которая включает в себя центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала. Центр масс Gc управляющего звена 15 расположен между центральной осью управляющего пальца 18 и центральной осью эксцентриковой части 21 вала на или рядом с линией, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала. Расстояние xgc0 существует между центральной осью эксцентриковой части 21 вала и центром масс Gc управляющего звена 15.
Если масса, расстояние между пальцами и положение центра масс (выраженное как расстояние от центра предписанного пальца) каждого из звеньев заданы так, что уравнение (12) удовлетворено, то вибрации второго и высшего порядка, ориентированные в поперечном направлении многозвенного двигателя 100 будут подавлены.
Теперь со ссылкой на фиг.4А, 4В и 5 будут описаны эффекты многозвенного двигателя 100. На фиг.4А изображен сравнительный пример многозвенного двигателя 200, который не удовлетворяет уравнению (12) и служит в качестве сравнительного примера относительно многозвенного двигателя 100. На фиг.5 изображены поперечно ориентированные силы инерции второго порядка, действующие в многозвенном двигателе 100. На фиг.4В изображены поперечно ориентированные силы инерции второго порядка, действующие в многозвенном двигателе 200.
Многозвенный двигатель 200, изображенный на фиг.4А, в основном, такой же, как многозвенный двигатель 100, за исключением того, что масса верхнего звена 213 меньше, чем масса верхнего звена 13, масса управляющего звена 215 больше, чем масса управляющего звена 15, и расстояние от центральной оси шатунной шейки до центра масс нижнего вена 214 длиннее, чем соответствующее расстояние в многозвенном двигателе 100. Масса нижнего звена 214 больше, чем масса верхнего звена 213, и больше, чем масса управляющего звена 215. С такой конфигурацией трудно удовлетворить уравнению (12), так как абсолютная величина двух положительных выражений (первого и второго выражений) на левой стороне уравнения (12) стремится быть больше, чем абсолютная величина отрицательного выражения (третьего выражения). Поскольку многозвенный двигатель 200 не удовлетворяет уравнению (12), левосторонние силы инерции второго порядка и правосторонние силы инерции второго порядка, действующие на звенья, не уравновешены, и сумма сил инерции второго порядка не может быть уменьшена. Следовательно, многозвенный двигатель 200 подвергается вибрациям второго порядка в поперечном направлении двигателя.
Наоборот, звенья многозвенного двигателя 100 выполнены для удовлетворения уравнению (12). Как видно из фиг.5, как величина силы инерции второго порядка нижнего звена 14 (первое выражение с левой стороны уравнения (12)), так и величина силы инерции второго порядка управляющего звена 15 (третье выражение с левой стороны уравнения (12)) примерно равны половине величины силы инерции второго порядка верхнего звена 13 (второе выражение с левой стороны уравнения (12)). Таким образом, при любом конкретном угле кривошипа сумма левосторонних сил инерции второго порядка звеньев, по существу, равна сумме правосторонних сил инерции второго порядка звеньев. Другими словами, сумма сил инерции второго порядка, действующих в поперечном (налево или направо) направлении двигателя в центрах масс звеньев, по существу, равна нулю. В результате этого результирующая движущая сила вибрации второго порядка, действующая для вибрации корпуса многозвенного двигателя 100, по существу, равна нулю, и вибрации второго порядка, ориентированные в поперечном направлении многозвенного двигателя 100, подавлены.
Несмотря на то, что предшествующее объяснение сфокусировано на вибрациях, которые являются вибрациями второго порядка исходя из частоты вращения двигателя, дополнительное уменьшение приглушенного шума в кабине может быть достигнуто посредством распределения, по меньшей мере, одного другого предписанного порядка сил инерции, которые имеют высший порядок, чем второй порядок, и действуют в поперечном направлении относительно направления перемещения поршня, так, что сумма левосторонних сил инерции предписанного порядка звеньев и сумма правосторонних сил инерции предписанного порядка звеньев, по существу, равны друг другу. В многозвенном двигателе 100 согласно этому варианту осуществления, поскольку звенья выполнены для удовлетворения уравнению (12), существуют высшие порядки вибрации, которые также подавлены вдобавок к вибрациям второго порядка.
Теперь будут описаны эффекты, которые могут быть достигнуты многозвенным двигателем 100 согласно первому варианту осуществления. Эти эффекты являются возможными благодаря особенностям, объясненным в предшествующих параграфах.
В многозвенном двигателе 100 массы и формы верхнего звена 13, нижнего звена 14 и управляющего звена 15 заданы таким образом, что сумма сил инерции второго порядка, действующих на верхнее звено 13, нижнее звено 14 и управляющее звено 15 в поперечном направлении корпуса двигателя, по существу, равна нулю, то есть, таким образом, что уравнение (12) удовлетворено. В результате этого вибрации второго и высшего порядка, ориентированные в поперечном направлении двигателя, могут быть уменьшены посредством простой конструкции.
В этом варианте осуществления для удовлетворения уравнению (12) предпочтительно, чтобы центр масс Gl нижнего звена 14 и центральная ось шатунной шейки 12А, расположенной в соединительном отверстии 14А, были расположены на линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Тем не менее, из-за различных ограничений, будет понятно, что нижнее звено 14 может быть вынужденно выполнено таким образом, что центр масс Gl и центральная ось шатунной шейки 12А будут расположены рядом, но не на линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18.
Фиг.6В представляет собой график, на котором изображено отношение между величиной D смещения (см. фиг.6А) центра масс Gl нижнего звена 14 и движущей силой вибрации второго порядка (то есть суммой поперечных сил инерции второго порядка звеньев) для случая, в котором центр масс Gl нижнего звена 14 смещен с линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Величина D смещения центра масс Gl нижнего звена выражена как расстояние между центром масс Gl и линией, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18.
С многозвенным двигателем 100 движущая сила вибрации второго порядка увеличивается по мере того, как увеличивается величина D смещения от центра масс Gl нижнего звена 14 до линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18, как обозначено сплошной кривой А, изображенной на фиг.6В. Тем не менее, внутри диапазона R1, который простирается на несколько миллиметров в положительном направлении и отрицательном направлении от точки, соответствующей величине D смещения, равной 0 мм, движущая сила вибрации второго порядка меньше, чем в случае многозвенного двигателя (например, сравнительный пример, изображенный на фиг.4), в котором поперечные силы инерции не принимаются во внимание при конструировании. Пунктирная линия В обозначает движущую силу вибрации многозвенного двигателя, в котором поперечные силы инерции не принимаются во внимание при конструировании. Таким образом, с многозвенным двигателем 100 пока величина D смещения центра масс Gl нижнего звена 14 является маленькой, звенья могут быть выполнены для удовлетворения уравнению (12), и вибрации второго и высшего порядка, ориентированные в поперечном направлении двигателя, могут быть уменьшены.
Фиг.6С представляет собой график, на котором изображено отношение между значением θВ корреляции величины смещения центральной оси шатунной шейки 12А и движущей силой вибрации второго порядка (то есть суммой поперечных сил инерции второго порядка звеньев) для случая, в котором соединительное отверстие 14А нижнего звена 14 выполнено так, что центральная ось шатунной шейки 12А смещена от линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. Значение θВ корреляции величины смещения центральной оси шатунной шейки 12А выражено как угол между линией, проходящей через центральную ось верхнего пальца 17 и центральную ось шатунной шейки 12А, и линией, проходящей через центральную ось управляющего пальца 18 и центральную ось шатунной шейки 12А.
С многозвенным двигателем 100 движущая сила вибрации второго порядка увеличивается по мере того, как значение θВ корреляции величины смещения центральной оси шатунной шейки 12А уменьшается от 180°, как обозначено сплошной кривой С, изображенной на фиг.6С. Тем не менее, внутри диапазона R2 значений θВ корреляции величины смещения, который простирается на несколько десятых градуса миллиметров в положительном направлении от 180°, движущая сила вибрации второго порядка меньше, чем в случае многозвенного двигателя (например, сравнительный пример, изображенный на фиг.4), в котором поперечные силы инерции не принимаются во внимание при конструировании (обозначено пунктирной линией В), и приглушенный шум, то есть шум двигателя внутри кабины транспортного средства, может быть уменьшен. Таким образом, с многозвенным двигателем 100 пока значение θВ корреляции величины смещения центральной оси шатунной шейки 12А является маленьким, звенья могут быть выполнены для удовлетворения уравнению (12), и вибрации второго и высшего порядка, ориентированные в поперечном направлении двигателя, могут быть уменьшены.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Теперь со ссылкой на фиг.7А-7С будут описаны звенья 13, 14 и 15 многозвенного двигателя 100 согласно второму варианту осуществления. На фиг.7А изображено нижнее звено 14. На фиг.7В изображено верхнее звено 13. На фиг.7С изображено управляющее звено 15. Составляющие признаки многозвенного двигателя 100 согласно второму варианту осуществления являются такими же, как в первом варианте осуществления, за исключением того, что нижнее звено 14 выполнено иначе. Ввиду одинаковости между первым и вторым вариантами осуществления будет описано только различие между нижним звеном 14 первого и второго вариантов осуществления. Другими словами, описания частей второго варианта осуществления, которые являются идентичными частям первого варианта осуществления, было опущено для краткости.
Как видно из фиг.7А, соединительное отверстие 14А выполнено и расположено так, что центральная ось шатунной шейки 12А будет расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18 на линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18. К тому же нижнее звено 14 выполнено так, что центр масс Gl нижнего звена 14 совпадает с центральной осью шатунной шейки 12А.
Таким образом, расстояние xgl0 от центральной оси шатунной шейки 12А до центра масс Gl нижнего звена 14 равно нулю. К тому же нижнее звено 14 выполнено так, что его часть, находящаяся на расстоянии от соединительного отверстия 14А к верхнему пальцу 17, по существу, симметрична его части, находящейся на расстоянии от соединительного отверстия 14А к управляющему пальцу 18, и так, что длина L4 от центральной оси верхнего пальца 17 до центральной оси шатунной шейки 12А, по существу, равна длине L2 от центральной оси шатунной шейки 12А до центральной оси управляющего пальца 18.
Когда расстояние xgl0 равно нулю, значение первого выражения на левой стороне уравнения (12), то есть выражения сил инерции, действующих на нижнее звено 14, равно нулю. Тем временем, поскольку длина L2 и длина L4, по существу, равны друг другу, третье выражение на левой стороне уравнения (12), то есть выражение сил инерции, действующих на верхнее звено 13, может быть упрощено. В результате этого уравнение (12) может быть сведено к уравнению (13), изображенному ниже.

Если масса, расстояние между пальцами и положение центра масс (выраженное как расстояние от центра предписанного пальца) как верхнего звена 13, так и управляющего звена 15 заданы так, что уравнение (13) удовлетворено, то вибрации второго и высшего порядка, ориентированные в поперечном направлении многозвенного двигателя 100, будут подавлены.
Другими словами, соединительное отверстие 14А для присоединения шатунной шейки 12А к нижнему звену 14 образовано так, что шатунная шейка 12А расположена между центральной осью верхнего пальца и центральной осью управляющего пальца 18. В результате этого, по меньшей мере, вибрации одного порядка, имеющие высший порядок, чем второй порядок исходя из частоты вращения двигателя, и действующие на звенья в поперечном направлении относительно направления перемещения поршня, подавляются. К тому же верхнее звено 13 и управляющее звено 15 выполнены так, что произведение массы mu верхнего звена 13 и отношения расстояния xgu0 от центральной оси поршневого пальца 16 до центра масс Gu верхнего звена 13 к длине L6 от центральной оси поршневого пальца 16 до центральной оси верхнего пальца 17, по существу, равно (уравновешено) произведению массы mc управляющего звена 15 и отношения расстояния xgc0 от центральной оси эксцентриковой части 21 вала управляющего вала до центра масс Gc управляющего звена 15 к длине L3 от центральной оси управляющего пальца 18 до центра эксцентриковой части 21 вала управляющего вала.
Как видно из фиг.7В и 7С, как верхнее звено 12, так и управляющее звено 15 представляют собой стержнеобразные элементы, имеющие, по существу, одинаковые формы, и каждый из них имеет две соединительные части 13А или 15А. Следовательно, частное, полученное делением расстояния xgu0 от центральной оси поршневого пальца 16 до центра масс Gu верхнего звена 13 на длину L6 от центральной оси поршневого пальца 16 до центральной оси верхнего пальца 17, по существу, равно частному, полученному делением расстояния xgc0 от центральной оси эксцентриковой части 21 вала управляющего вала до центра масс Gc управляющего звена 15 на длину L3 от центральной оси управляющего пальца 18 до центра эксцентриковой части 21 вала управляющего вала. В результате этого уравнение (13) может быть удовлетворено посредством выполнения массы mu верхнего звена 13, по существу, равной массе mc управляющего звена.
В этом варианте осуществления соединительное отверстие 14А для присоединения шатунной шейки 12А к нижнему звену 14 выполнено так, что шатунная шейка 12А расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18, и верхнее звено 13 и управляющее звено 15 выполнены так, что масса верхнего звена 13 и масса управляющего звена 15, по существу, равны друг другу. В результате этого, по меньшей мере, вибрация одного порядка, имеющая высший порядок, чем второй порядок исходя из частоты вращения двигателя, и действующая на звенья в поперечном направлении относительно направления перемещения поршня, подавляется.
Теперь будут описаны эффекты, которые могут быть достигнуты многозвенным двигателем 100 согласно второму варианту осуществления. Эти эффекты являются возможными благодаря особенностям, объясненным в предшествующих параграфах.
С многозвенным двигателем 100 согласно второму варианту осуществления соединительное отверстие 14А нижнего звена 14 выполнено так, что шатунная шейка 12А расположена между центральной осью верхнего пальца 17 и центральной осью управляющего пальца 18 на линии, проходящей через центральную ось верхнего пальца 17 и центральную ось управляющего пальца 18, и верхнее звено 13 и управляющее звено 15 выполнены так, что масса mu верхнего звена 13 и масса mc управляющего звена 15, по существу, равны друг другу. В результате этого уравнение (13) удовлетворено, и вибрации второго и высшего порядка, ориентированные в поперечном направлении двигателя, могут быть подавлены таким же образом, как с первым вариантом осуществления.
ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Теперь будет описан многозвенный двигатель 100 согласно третьему варианту осуществления со ссылкой на фиг.8 и 9. Фиг.8 представляет собой схематичный вид многозвенного двигателя согласно третьему варианту осуществления. На фиг.9 изображены поперечно ориентированные силы инерции второго порядка, действующие в центрах масс звеньев многозвенного двигателя 100. Многозвенный двигатель 100 согласно третьему варианту осуществления, в основном, подобен первому варианту осуществления тем, что звенья выполнены для удовлетворения уравнению (12). Тем не менее, управляющее звено 15 выполнено иначе. Конкретно, в этом варианте осуществления на управляющем звене 15 предусмотрен противовес 15В. Третий вариант осуществления будет теперь описан с фокусом на это различие.
Как изображено в уравнении (11), среди сил инерции второго порядка и высшего порядка, ориентированных в поперечном направлении двигателя, силы инерции, действующие на нижнее звено 14 и управляющее звено 15, ориентированы в одинаковом направлении (таким образом, обе даны положительными выражениями в уравнении), и силы инерции, действующие на верхнее звено 13, ориентированы в противоположном направлении (и, таким образом, даны отрицательным выражением в уравнении). Для уравновешивания суммы сил инерции, действующих на нижнее звено 14 и управляющее звено 15 силой инерции, действующей на верхнее звено 13 и для удовлетворения уравнению (12) необходимо увеличить массу верхнего звена 13 так, чтобы сила инерции, действующая на верхнее звено 13, была довольно большой.
Многозвенный двигатель 100 согласно третьему варианту осуществления имеет противовес 15В, который предусмотрен на управляющем звене 15 для того, чтобы сделать сумму сил инерции нижнего звена 14 и управляющего звена 15 настолько маленькой, насколько это возможно. В результате этого поперечные вибрации второго и высшего порядка уменьшены посредством более простой конструкции для уравновешивания сил инерции звеньев. Как видно из фиг.8, управляющее звено многозвенного двигателя 100 предусмотрено с противовесом 15В на концевой части, рядом с расположением эксцентрикового вала. Противовес 15В выполнен и расположен так, что центр масс Gc управляющего звена 15 установлен на линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала, поддерживающей управляющее звено 15, и на противоположной стороне центральной оси эксцентриковой части 21 вала от центральной оси управляющего пальца 18.
Установка центра масс Gc управляющего звена 15 в таком положении заставляет поперечно ориентированное поведение центра масс Gc быть противоположным поведению центра масс Gc в первом варианте осуществления. Следовательно, как видно из фиг.9, направление силы инерции второго порядка, действующей в центре масс Gc управляющего звена 15, является противоположным направлению силы инерции, действующей в центре масс Gl нижнего звена 14, и совпадает с направлением силы инерции, действующей в центре масс Gu верхнего звена 13. Таким образом, расстояние xgc0 от центральной оси эксцентриковой части 21 вала до центра масс Gc управляющего звена 15 является отрицательной величиной, и выражения управляющего звена уравнений (11) и (12) (первое выражение на левой стороне уравнения (12)) являются отрицательными.
Теперь будут описаны эффекты, которые могут быть достигнуты многозвенным двигателем 100 согласно третьему варианту осуществления. Эти эффекты являются возможными благодаря особенностям, объясненным в предшествующих параграфах.
Противовес 15В многозвенного двигателя 100 предусмотрен на концевой части управляющего звена 15 рядом с расположением эксцентриковой части 21 вала и выполнен так, что центр масс Gc управляющего звена 15 установлен на линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала и на стороне центральной оси эксцентриковой части 21 вала, противоположной управляющему пальцу 18. Масса нижнего звена 14 стремится быть больше, чем масса управляющего звена 15 и, таким образом, силы инерции второго порядка и высшего порядка стремятся быть больше. Тем не менее, сумма сил инерции второго и высшего порядка нижнего звена 14 и управляющего звена 15 может быть уменьшена посредством выполнения звеньев так, чтобы направление поперечных сил инерции второго и высшего порядка, действующих в центре масс Gc управляющего звена 15, было противоположным направлению их же в первом и втором вариантах осуществления. В результате этого поперечные вибрации второго и высшего порядка, возникающие в результате поведения нижнего звена 14 и управляющего звена 15, могут быть уменьшены. Также, когда сумма сил инерции нижнего звена 14 и управляющего звена 15 уменьшена, будет легче уравновесить поперечные силы второго и высшего порядка верхнего звена 13, и, следовательно, силы инерции всех звеньев могут быть уравновешены более легко.
В этом многозвенном двигателе 100 сумма поперечных сил инерции второго и высшего порядка, действующих в центре масс Gu верхнего звена 13 и в центре масс Gc управляющего звена 15, установлена равной поперечным силам инерции второго и высшего порядка, действующим в центре масс Gl нижнего звена 14 так, что уравнение (12) удовлетворено. В результате этого, как видно из фиг.9, сумма поперечных сил инерции второго порядка, по существу, равна нулю. В результате этого, движущая сила вибрации второго порядка, действующая для вибрации корпуса многозвенного двигателя 100, уменьшена, и вибрации второго порядка подавлены.
Несмотря на то, что предшествующее описание, основанное на фиг.9, сфокусировано на вибрациях второго порядка, подобно первому варианту осуществления, вибрации, которые имеют высший порядок, чем вибрации второго порядка, также подавляются в многозвенном двигателе 100 согласно третьему варианту осуществления.
В третьем варианте осуществления противовес 15В, предусмотренный на управляющем звене 15, выполнен так, что центр масс Gc управляющего звена 15 установлен на линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала и на противоположной стороне центральной оси эксцентриковой части 21 вала от центральной оси управляющего пальца 18. К тому же, даже когда центр масс Gc управляющего звена 15 находится на линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 и между центральной осью управляющего пальца 18 и центральной осью эксцентриковой части 21, центр масс Gc управляющего звена 15 может быть перемещен ближе к центральной оси эксцентриковой части 21 вала посредством предусмотрения противовеса 15В на управляющем звене 15. Таким образом, расстояние xgc0 от центральной оси эксцентриковой части 21 вала до центра масс Gc управляющего звена 15 может быть сокращено так, чтобы величина выражения управляющего звена в уравнении (12) уменьшилась. В результате этого сумма сил инерции второго и высшего порядка, действующих на нижнее звено 14 и управляющее звено 15, может быть уменьшена, и вибрации второго и высшего порядка могут быть уменьшены посредством использования более простой конструкции для уравновешивания сил инерции звеньев.
ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Теперь со ссылкой на фиг.10А, 10В, 11А и 11В будет описан многозвенный двигатель 100 согласно четвертому варианту осуществления. Фиг.10А представляет собой схематичный вид многозвенного двигателя 100 согласно четвертому варианту осуществления. Фиг.10В представляет собой схематичный вид управляющего звена 15. Фиг.11А представляет собой график, на котором изображены силы инерции второго порядка, действующие на звенья в поперечном направлении двигателя. Фиг.11В представляет собой график, на котором изображены силы инерции второго порядка, действующие на звенья в вертикальном направлении двигателя (в направлении перемещения поршня). Составляющие признаки многозвенного двигателя 100 согласно четвертому варианту осуществления являются такими же, как в третьем варианте осуществления, за исключением того, что положение центра масс управляющего звена 15 является другим. Конкретно, управляющее звено 15 предусмотрено с противовесом 15В, выполненным так, что центр масс Gc управляющего звена 15 смещен от линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала. Четвертый вариант осуществления будет теперь описан с фокусом, главным образом, на это различие.
Как видно из фиг.10А, управляющее звено 15 многозвенного двигателя предусмотрено с противовесом 15В на концевой части рядом с расположением эксцентриковой части 21 вала. Противовес 15В выполнен так, что когда он предусмотрен на управляющем звене 15, центр масс Gc управляющего звена 15 расположен на стороне центральной оси эксцентриковой части 21 вала, противоположной управляющему пальцу 18, в положении рядом, но не на (то есть слегка смещенном от) линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала.
Как видно из фиг.10В, центр масс Gc управляющего звена 15 может быть воспринят как разделенный на составляющую Р центра масс, расположенную на оси Х, которая проходит через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала, и составляющую Q центра масс, расположенную на оси Y, которая проходит через центральную ось эксцентриковой части 21 вала и перпендикулярна оси Х.
Составляющая Р центра масс расположена на оси Х на стороне оси Y, противоположной управляющему пальцу 18, и способствует поперечной силе инерции, действующей на управляющее звено 15, как уже было подробно описано в третьем варианте осуществления. Направление поперечных сил инерции второго и высшего порядка, действующих в составляющей Р центра масс, противоположно направлению поперечных сил инерции второго и высшего порядка, действующих в центре масс Gl нижнего звена 14. Следовательно, подобно третьему варианту осуществления, вибрации второго и высшего порядка могут быть уменьшены посредством использования более простой конструкции для уравновешивания сил инерции второго и высшего порядка в звеньях, как видно из фиг.11А.
Наоборот, когда управляющее звено 15 поворачивается вокруг эксцентриковой части 21 вала, составляющая Q центра масс качается в вертикальном направлении двигателя и способствует силе инерции, действующей на управляющее звено 15 в вертикальном направлении двигателя. Следовательно, посредством регулировки формы и массы противовеса 15В и расстояния ygc0 от центральной оси эксцентриковой части 21 вала до составляющей Q центра масс, сумма сил инерции второго порядка, действующих на звенья 13-15 и поршень 11 в вертикальном направлении двигателя, может быть сведена, примерно, к нулю, и вертикальная вибрация второго порядка может быть уменьшена, как видно из фиг.11В.
Теперь будут описаны эффекты, которые могут быть достигнуты многозвенным двигателем 100 согласно четвертому варианту осуществления. Эти эффекты являются возможными благодаря особенностям, объясненным в предшествующих параграфах.
В этом многозвенном двигателе 100 противовес 15В предусмотрен на концевой части управляющего звена 15 рядом с расположением эксцентриковой части 21 вала, и противовес 15В выполнен так, что центр масс Gc управляющего звена 15 смещен от линии, проходящей через центральную ось управляющего пальца 18 и центральную ось эксцентриковой части 21 вала и расположен на стороне центральной оси эксцентриковой части 21 вала, противоположной управляющему пальцу 18. В результате этого как поперечные вибрации, так и вертикальные вибрации могут быть уменьшены.
ОБЩИЕ ОБЪЯСНЕНИЯ ТЕРМИНОВ
В понимании объема настоящего изобретения термин «содержать» и его производные, используемые в этом документе, подразумеваются не окончательными терминами, которые обозначают наличие изложенных признаков, элементов, компонентов, групп, целых чисел и/или этапов, но не исключают наличие других не изложенных признаков, элементов, компонентов, групп, целых чисел и/или этапов. Предшествующее также применяется к словам, имеющим подобные значения, таким как термины «включать в себя», «иметь» и их производные. Также используемые в этом документе для описания упомянутого выше варианта (вариантов) осуществления следующие термины, обозначающие направление: «вперед», «назад», «выше», «вниз», «вертикальный», «горизонтальный», «под» и «поперечный», а также любые другие термины, обозначающие направление, относятся к направлениям транспортного средства, оснащенного многозвенным двигателем. Соответственно, эти термины, используемые для описания многозвенного двигателя, должны быть объяснены относительно транспортного средства, оснащенного многозвенным двигателем. Термины степени, такие как «по существу», «около» и «примерно», используемые в этом документе, означают разумное количество отклонения измененного термина, такое, что конечный результат не изменен значительно.
Среди специалистов в области техники двигателей является обычным использование выражений «верхняя мертвая точка» и «нижняя мертвая точка» независимо от направления гравитации. В горизонтальных оппозитных двигателях (плоский двигатель) и других подобных двигателях верхняя мертвая точка и нижняя мертвая точка не обязательно соответствуют верху и низу двигателя, соответственно, исходя из направления гравитации. Более того, если двигатель перевернут, верхняя мертвая точка может соответствовать низу или направлению вниз исходя из направления гравитации, и нижняя мертвая точка может соответствовать верху или направлению вверх исходя из направления гравитации. Тем не менее, в этом описании рассматривается обычная практика, и направление, соответствующее верхней мертвой точке, относится к «направлению вверх» или «верху», и направление, соответствующее нижней мертвой точке, относится к «направлению вниз» или «низу».
Несмотря на то, что для иллюстрирования настоящего изобретения были выбраны только конкретные варианты осуществления, специалистам в данной области техники из этого описания будет понятно, что в этом документе могут быть сделаны различные изменения и модификации без отхода от объема изобретения, определенного в прилагаемой формуле изобретения. Например, размер, форма, расположение или ориентация различных компонентов могут быть изменены при необходимости и/или желании. Более того, несмотря на то, что варианты осуществления с первого по четвертый представляют примеры четырехцилиндрового двигателя, изобретение также может быть применено к шестицилиндровому двигателю для уменьшения поперечных вибраций третьего порядка, которые обычно являются проблемой в шестицилиндровых двигателях. Конструкции и функции одного варианта осуществления могут быть приняты в другом варианте осуществления. Одновременное присутствие всех преимуществ в конкретном варианте осуществления не является необходимым. Каждый признак, который является уникальным относительно предшествующего уровня техники, отдельно или в комбинации с другими признаками также должен быть рассмотрен в отдельном описании дополнительных изобретений заявителя, включающих в себя конструкционные и/или функциональные идеи, осуществленные таким признаком (признаками). Таким образом, предшествующие описания вариантов осуществления согласно настоящему изобретению предусмотрены чисто в иллюстративных целях и не для ограничения изобретения, определенного в прилагаемой формуле изобретения и ее эквивалентах.














Изобретение может быть использовано в двигателестроении. Многозвенный двигатель (100) содержит верхнее звено (13), нижнее звено (14) и управляющее звено. (15). Верхнее звено (13) шарнирно присоединено к поршню (11) поршневым пальцем (16). Нижнее звено (14) установлено с возможностью вращения на шатунной шейке (12А) коленчатого вала (12) и присоединено к верхнему звену (13) верхним пальцем (17). Управляющее звено (15) присоединено с возможностью вращения к нижнему звену (14) управляющим пальцем (18) и шарнирно установлено на шарнирной части (21) управляющего вала. Звенья (13, 14, 15) выполнены и расположены друг относительно друг так, что силы инерции второго или высшего порядка исходя из частоты вращения двигателя действуют, по меньшей мере, на верхнее звено (13) и управляющее звено (15) в поперечном направлении двигателя (100) с суммой левосторонних и правосторонних сил инерции второго или высшего порядка, равной, по существу, нулю. Технический результат заключается в уменьшении вибрации. 4 н. и 9 з.п. ф-лы, 21 ил.
1. Многозвенный двигатель, содержащий:
корпус блока цилиндров, включающий в себя, по меньшей мере, один цилиндр;
поршень, расположенный с возможностью осуществления возвратно-поступательного перемещения внутри цилиндра корпуса блока цилиндров;
верхнее звено, имеющее первый конец, шарнирно присоединенный к поршню поршневым пальцем;
нижнее звено, установленное с возможностью вращения на шатунной шейке коленчатого вала и присоединенное ко второму концу верхнего звена верхним пальцем; и
управляющее звено, имеющее первый конец, присоединенный с возможностью вращения к нижнему звену управляющим пальцем, и второй конец, шарнирно установленный на шарнирной части управляющего вала,
причем верхнее звено, нижнее звено и управляющее звено выполнены и расположены относительно друг друга так, что силы инерции предписанного второго или высшего порядка исходя из частоты вращения двигателя действуют, по меньшей мере, на верхнее звено и управляющее звено в поперечном направлении двигателя с суммой левосторонних сил инерции предписанного второго или высшего порядка, по существу, равной сумме правосторонних сил инерции предписанного второго или высшего порядка, причем поперечное направление ориентировано поперечно налево и направо относительно направления вертикального перемещения поршня, когда многозвенный двигатель рассматривается вдоль осевого направления коленчатого вала.
2. Многозвенный двигатель по п.1, в котором нижнее звено включает в себя соединительное отверстие, расположенное в положении с шатунной шейкой, расположенной в соединительном отверстии, так, что шатунная шейка расположена между центральной осью верхнего пальца и центральной осью управляющего пальца.
3. Многозвенный двигатель по п.2, в котором
шатунная шейка включает в себя центральную ось, которая расположена на линии, соединяющей центральные оси верхнего пальца и управляющего пальца.
4. Многозвенный двигатель по п.2, в котором
нижнее звено имеет центр масс, который совпадает с центральной осью шатунной шейки.
5. Многозвенный двигатель по п.1, в котором
управляющее звено имеет противовес, предусмотренный на концевой части, ближайшей к расположению шарнирной части.
6. Многозвенный двигатель по п.5, в котором противовес управляющего звена выполнен так, что центр масс управляющего звена расположен на линии, проходящей через центральную ось управляющего пальца и центральную ось шарнирной части управляющего вала, и так, что центр масс управляющего звена расположен на стороне центральной оси шарнирной части управляющего вала, противоположной центральной оси управляющего пальца.
7. Многозвенный двигатель по п.5, причем
противовес управляющего звена выполнен так, что центр масс управляющего звена смещен от линии, проходящей через центральную ось управляющего пальца и центральную ось шарнирной части управляющего вала.
8. Многозвенный двигатель по п.5, причем противовес управляющего звена выполнен так, что направление силы инерции, действующей на управляющее звено, противоположно направлению силы инерции, действующей на нижнее звено.
9. Многозвенный двигатель по п.1, причем
многозвенный двигатель представляет собой четырехцилиндровый двигатель.
10. Многозвенный двигатель, содержащий:
корпус блока цилиндров, включающий в себя, по меньшей мере, один цилиндр;
поршень, расположенный с возможностью осуществления возвратно-поступательного перемещения внутри цилиндра корпуса блока цилиндров;
верхнее звено, имеющее первый конец, шарнирно присоединенный к поршню поршневым пальцем;
нижнее звено, установленное с возможностью вращения на шатунной шейке коленчатого вала и присоединенное к второму концу верхнего звена верхним пальцем; и
управляющее звено, имеющее первый конец, присоединенный с возможностью вращения к нижнему звену управляющим пальцем, и второй конец, шарнирно установленный на шарнирной части управляющего вала,
причем нижнее звено имеет соединительное отверстие с шатунной шейкой, расположенной в соединительном отверстии так, что как центр масс нижнего звена, так и центральная ось шатунной шейки расположены на линии, проходящей через центральную ось верхнего пальца и центральную ось управляющего пальца, и расположены между центральными осями верхнего пальца и управляющего пальца,
причем верхнее звено, нижнее звено и управляющее звено выполнены и расположены относительно друг друга для удовлетворения:

где m1 является массой нижнего звена, Xg10 является расстоянием от центральной оси шатунной шейки до центра масс нижнего звена, L2 представляет собой длину от центральной оси шатунной шейки до центральной оси управляющего пальца, mc является массой управляющего звена, Xgc0 является расстоянием от центральной оси шарнирной части управляющего вала до центра масс управляющего звена, L3 представляет собой длину от центральной оси управляющего пальца до центральной оси шарнирной части управляющего вала, mu является массой верхнего звена, xgu0 является расстоянием от центральной оси поршневого пальца до центра масс верхнего звена, L4 представляет собой длину от центральной оси верхнего пальца до центральной оси шатунной шейки, и l6 представляет собой длину от центральной оси поршневого пальца до центральной оси верхнего пальца.
11. Многозвенный двигатель, содержащий:
корпус блока цилиндров, включающий в себя, по меньшей мере, один цилиндр;
поршень, расположенный с возможностью осуществления возвратно-поступательного перемещения внутри цилиндра корпуса блока цилиндров;
верхнее звено, имеющее первый конец, шарнирно присоединенный к поршню поршневым пальцем;
нижнее звено, установленное с возможностью вращения на шатунной шейке коленчатого вала и присоединенное к второму концу верхнего звена верхним пальцем; и
управляющее звено, имеющее первый конец, присоединенный с возможностью вращения к нижнему звену управляющим пальцем, и второй конец, шарнирно установленный на шарнирной части управляющего вала,
причем нижнее звено имеет соединительное отверстие с шатунной шейкой, расположенной в соединительном отверстии так, что центральная ось шатунной шейки расположена на линии, проходящей через центральную ось верхнего пальца и центральную ось управляющего пальца, и расположена между центральной осью верхнего пальца и центральной осью управляющего пальца, и нижнее звено имеет центр масс, который совпадает с центральной осью шатунной шейки,
причем верхнее звено и управляющее звено выполнены и расположены относительно друг друга для удовлетворения:

где mc является массой управляющего звена, xgc0 является расстоянием от центральной оси шарнирной части управляющего вала до центра масс управляющего звена, L3 представляет собой длину от центральной оси управляющего пальца до центральной оси шарнирной части управляющего вала, mu является массой верхнего звена, Xgu0 является расстоянием от центральной оси поршневого пальца до центра масс верхнего звена, и L6 представляет собой длину от центральной оси поршневого пальца до центральной оси верхнего пальца.
12. Многозвенный двигатель по п.11, в котором
верхнее звено и управляющее звено выполнены так, что масса ту верхнего звена и масса mc управляющего звена, по существу, равны.
13. Многозвенный двигатель, содержащий:
корпус блока цилиндров, включающий в себя, по меньшей мере, один цилиндр;
поршень, расположенный с возможностью осуществления возвратно-поступательного перемещения внутри цилиндра корпуса блока цилиндров;
верхнее звено, имеющее первый конец, шарнирно присоединенный к поршню поршневым пальцем;
нижнее звено, установленное с возможностью вращения на шатунной шейке коленчатого вала и присоединенное ко второму концу верхнего звена верхним пальцем; и
управляющее звено, имеющее первый конец, присоединенный с возможностью вращения к нижнему звену управляющим пальцем, и второй конец, шарнирно установленный на шарнирной части управляющего вала,
причем шатунная шейка расположена между центральной осью верхнего пальца и центральной осью управляющего пальца, и верхнее звено и управляющее звено выполнены так, что произведение массы верхнего звена на отношение расстояния от центральной оси поршневого пальца до центра масс верхнего звена к длине от центральной оси поршневого пальца до центральной оси верхнего пальца, по существу, равно произведению массы управляющего звена на отношение расстояния от центральной оси шарнирной части до центра масс управляющего звена к длине от центральной оси управляющего пальца до центральной оси шарнирной части для того, чтобы подавлять вибрации предписанного второго или высшего порядка по отношению к частоте вращения двигателя, которые действуют на звенья в поперечном направлении двигателя, причем поперечное направление ориентировано поперечно налево и направо относительно направления вертикального перемещения поршня, когда многозвенный двигатель рассматривается вдоль осевого направления коленчатого вала.
| US 2007204829 A1, 06.09.2007 | |||
| US 2007215132 A1, 20.09.2007 | |||
| Зажимное устройство для троса | 1984 |
|
SU1180588A1 |
| EP 1215380 A2, 19.06.2002 | |||
| ПОРШНЕВОЙ ДВИГАТЕЛЬ | 1999 |
|
RU2161258C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2166653C2 |
| RU 22296870 C1, 10.04.2007 | |||
| Двигатель внутреннего сгорания | 1977 |
|
SU878990A1 |

