Изобретение относится к системам обмена данными и может быть использовано для информационного обмена между подвижными объектами (ПО) и источниками (получателями) информации через наземные комплексы (НК) и наземную сеть передачи данных.
Известна система радиосвязи с подвижными объектами [1]. В этой системе во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом. Принимаемые наземным комплексом из канала «воздух-земля» сообщения через аппаратуру передачи данных поступают в вычислитель автоматизированного рабочего места (АРМ), где в соответствии с принятым в системе протоколом обмена, производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ решается задача обеспечения постоянной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи, необходимость ретрансляции сигналов определяется программно. Один из ПО назначается ретранслятором сообщений или используется канал ДКМВ диапазона. По результатам анализа местоположения и параметров движения остальных ПО определяются оптимальные пути доставки сообщений удаленному от НК за радиогоризонт выбранному подвижному объекту. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО или канала ДКМВ диапазона, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовка) передаваемой кодограммы закладываются номер ПО, назначенного ретранслятором в канале MB диапазона, и адреса подвижных объектов, обеспечивающих заданный трафик сообщения. Принятые на ПО сообщения анализируются в блоке анализа типа сообщений для решения вопроса о направлении данных по двунаправленной шине на систему управления объекта или о ретрансляции их на соседний ПО.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляется адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображается на мониторе АРМ. На подвижном объекте после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал поступает в бортовой вычислитель, где происходит идентификация принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передается в блок анализа типа ретранслируемого сообщения, где происходит дешифрация полученного заголовка (служебной части) сообщения, и определяется в каком режиме должна работать аппаратура ПО. Информационная часть сообщения записывается в память бортового вычислителя и при необходимости выводится на экран блока регистрации данных. Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляется на блоке регистрации данных ПО и мониторе АРМ на НК соответственно. Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записываются в память наземного и бортового вычислителей с привязкой к глобальному времени и используются для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатываются в наземном вычислителе и выводятся на экран монитора АРМ.
Однако следует отметить следующие недостатки:
- отсутствует контроль параметров используемых радиоканалов связи на подвижных объектах;
- нет базы данных о местоположении ПО, действующих в зоне обслуживания системы, что затрудняет использование методов повышения достоверности передачи информации.
Известна система радиосвязи с подвижными объектами [2], состоящая из М наземных комплексов, соединенных радиоканалами связи с N подвижными объектами, а между собой НК соединены двухсторонними связями с помощью наземной сети передачи данных. Наземный комплекс содержит наземные антенны и радиостанции MB и ДКМВ диапазонов. В системе используется зоновый способ управления ресурсами связи, при котором за каждым ПО постоянно на время полета закрепляются радиоканалы действующих средств связи. Для обеспечения устойчивого обмена данными НК с ПО все воздушное пространство разбивается на участки (зоны) и все радиосредства, направленные с помощью антенн в них, находятся в ожидании приема соответствующих радиосигналов. Управление обменом данными между НК и ПО осуществляется с помощью вычислителя автоматизированного рабочего места. Общая синхронизация процессов обработки сигналов в системе обеспечивается тактовыми импульсами приемника сигналов навигационных спутниковых систем.
В состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений и бортовой формирователь типа ретранслируемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, вход/выход которого соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию подключен к бортовой антенне. Первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона. Передающие станции ДКМВ диапазона в количестве В штук подключены двухсторонними связями к наземной сети передачи данных, а по радиоканалам - к М наземным комплексам. В состав наземного комплекса системы входят: модуль сопряжения, подключенный двухсторонними связями к соответствующим входам/выходам наземного вычислителя и наземной сети передачи данных, К направленных антенн ДКМВ диапазона с соответствующими К приемниками ДКМВ диапазона соединены с соответствующими К входами/выходами вычислителя автоматизированного рабочего места. Каждая из В передающих станций ДКМВ диапазона содержит антенну ДКМВ диапазона, подключенную через последовательно соединенные передатчик ДКМВ диапазона и формирователь сигналов к соответствующему входу/выходу вычислителя автоматизированного рабочего места.
В ситуации, когда одно или несколько ПО вышли за пределы прямой видимости соответствующего НК или не удается организовать с этими ПО обмен данными даже через цепочку, состоящую из (N-1)-го ПО, осуществляется переход по взаимно увязанным во времени командам с бортового и наземного вычислителей на замену радиолинии связи MB диапазона на спутниковый канал связи [3] или радиолинию связи ДКМВ диапазона, состоящую из бортовой радиостанции ДКМВ диапазона, бортовой антенны ДКМВ диапазона, наземной радиостанции ДКМВ диапазона, наземной антенны ДКМВ диапазона. Все воздушное пространство разделено на зоны, в которых за всеми воздушными судами в них в каждом диапазоне закреплены соответствующие частоты на длительный период времени [3].
С помощью модуля сопряжения с наземной сетью передачи данных для каждого из ПО, оборудованному ДКМВ радиостанцией, осуществляется передача (прием) пакетов данных с(на) несколько наземных комплексов. Каждый НК периодически излучает сигналы управления/синхронизации/связи, используемые на ПО в качестве маркеров, на всех назначенных ему частотах в зоне его полета, Принимаемые на ПО радиосигналы используются для оценки параметров канала связи ДКМВ диапазона. В этом случае, на подвижном объекте по принятым маркерам определяется НК, параметры радиосигналов которого принимаются наиболее устойчиво, и через него начинается обмен данными. В бортовом и наземном вычислителях хранятся предварительно заложенные таблицы со списками и параметрами НК, передающих станций ДКМВ диапазона и наборами назначенных им частот. В бортовом вычислителе заложены также координаты всех НК. Для установления линии связи с НК в бортовом вычислителе автоматически анализируются принимаемые сигналы управления/синхронизации/связи от всех наземных комплексов на всех частотах и выбираются лучшие частоты (например, по отношению сигнал/помеха или величине мощности принимаемого сигнала) и соответствующие наземные комплексы для реализации известного принципа адаптации по частоте и пространству. По измеренному отношению сигнал/помеха, в бортовом вычислителе выбирается скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется всеми НК и ПО каждый раз при приеме информационного сообщения или сигнала управления/синхронизации/связи. Сведения об оптимальном на данный момент времени канале сообщаются на противоположную сторону в виде рекомендуемых частот и скорости передачи данных.
Однако следует отметить следующие недостатки:
отсутствует передача сведений об оптимальных на данный момент времени частотах радиоканалов связи на наземные комплексы;
нет базы данных о местоположении ПО, действующих в зоне обслуживания системы неизвестно соответственно направление на них с наземных комплексов, обеспечивающих обмен данными.
Наиболее близким по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [4], которая и принята за прототип. В этой системе радиосвязи с подвижными объектами, состоящей из М наземных комплексов, соединенных радиоканалами связи с N подвижными объектами (ПО), как непосредственно, так и через соответствующие спутники связи из созвездия спутников. Между собой наземные комплексы соединены с помощью наземной сети передачи данных с входом/выходом системы для сопряжения с источниками и получателями информации. Наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, которые подключены двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ. Второй и третий входы/выходы вычислителя АРМ подключены к входам/выходам наземного блока управления наземной антенной наземной, станции спутниковой связи и наземной станции спутниковой связи соответственно. Пятый вход/выход вычислителя АРМ подключен к управляющему входу/выходу наземной радиостанции ДКМВ диапазона. Модуль сопряжения подключен двухсторонними связями к четвертому входу/выходу вычислителя автоматизированного рабочего места. Выход наземного блока управления наземной антенной наземной станции спутниковой связи соединен с входом управления наземной антенны наземной станции спутниковой связи. Вход/выход наземного блока хранения команд управления соединен двухсторонними связями с соответствующим входом/выходом вычислителя АРМ. В состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов глобальных навигационных спутниковых систем и анализатор типа принимаемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя. Первый вход/выход бортового вычислителя подключен к двунаправленной шине системы управления подвижным объектом, второй вход/выход через последовательно соединенные бортовую станцию спутниковой связи, бортовую антенну бортовой станции спутниковой связи, соответствующий спутник связи из созвездия спутников, наземную антенну наземной станции спутниковой связи соединен с наземной станцией спутниковой связи. Третий вход/выход бортового вычислителя через блок управления бортовой антенны бортовой станции спутниковой связи соединен непосредственно с бортовой антенной бортовой станции спутниковой связи. Бортовой вычислитель соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона. Первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно. Третий вход/выход бортовой радиостанции ДКМВ диапазона подключен к бортовой антенне ДКМВ диапазона. Вход/выход бортового блока хранения команд управления соединен двухсторонними связями с соответствующим входом/выходом бортового вычислителя.
Однако прототипу присущи следующие недостатки:
низка достоверность передачи информации на ПО, находящегося за горизонтом, при наличии помех и замирании радиосигналов в спутниковом и ДКМВ каналах, что может привести к неправильной оценке оператором текущей ситуации на подвижном объекте и воздушной обстановки вокруг него;
сведения об оптимальном на данный момент времени каналах и частотах не сообщаются на остальные НК и подвижные объекты, находящиеся в этом районе.
Таким образом, основной технической задачей, на решение которой направлено заявляемое изобретение, является повышение достоверности передачи сообщений на удаленный подвижный объект, находящийся за горизонтом, при наличии помех и замирании радиосигналов.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами, состоящую из М наземных комплексов (НК), соединенных радиоканалами связи с N подвижными объектами (ПО), как непосредственно, так и через соответствующие спутники связи из созвездия спутников, а между собой наземные комплексы соединены с помощью наземной сети передачи данных с входом/выходом системы, причем наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, которые подключены двухсторонними связями через наземную аппаратуру передачи данных (АПД) к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, второй и третий входы/выходы вычислителя АРМ подключены к входам/выходам наземного блока управления наземной антенной наземной станции спутниковой связи и наземной станции спутниковой связи соответственно, пятый вход/выход которого подключен к управляющему входу/выходу наземной радиостанции ДКМВ диапазона, модуль сопряжения подключен двухсторонними связями к четвертому входу/выходу вычислителя автоматизированного рабочего места, выход наземного блока управления наземной антенной наземной станции спутниковой связи соединен с входом управления наземной антенны наземной станции спутниковой связи, наземный блок хранения команд управления, вход/выход которого соединен двухсторонними связями с соответствующим входом/выходом вычислителя АРМ, в состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов навигационных спутниковых систем и анализатор типа принимаемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, второй вход/выход через последовательно соединенные бортовую станцию спутниковой связи, бортовую антенну бортовой станции спутниковой связи, соответствующий спутник связи из созвездия спутников, наземную антенну наземной станции спутниковой связи соединен с наземной станцией спутниковой связи, третий вход/выход через блок управления бортовой антенной бортовой станции спутниковой связи соединен непосредственно с бортовой антенной бортовой станции спутниковой связи, бортовой вычислитель соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона, первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона, бортовой блок хранения команд управления, вход/выход которого соединен двухсторонними связями с соответствующим входом/выходом бортового вычислителя, в нее введены бортовой и наземный блоки маршрутизации и оценки параметров радиоканалов связи, причем вход/выход наземного блока маршрутизации и оценки параметров радиоканалов связи соединен двухсторонними связями с соответствующим входом/выходом вычислителя АРМ, вход/выход бортового блока маршрутизации и оценки параметров радиоканалов связи соединен двухсторонними связями с соответствующим входом/выходом бортового вычислителя, антенны MB диапазона подвижных объектов, находящихся в зоне прямой видимости, по эфиру связаны между собой.
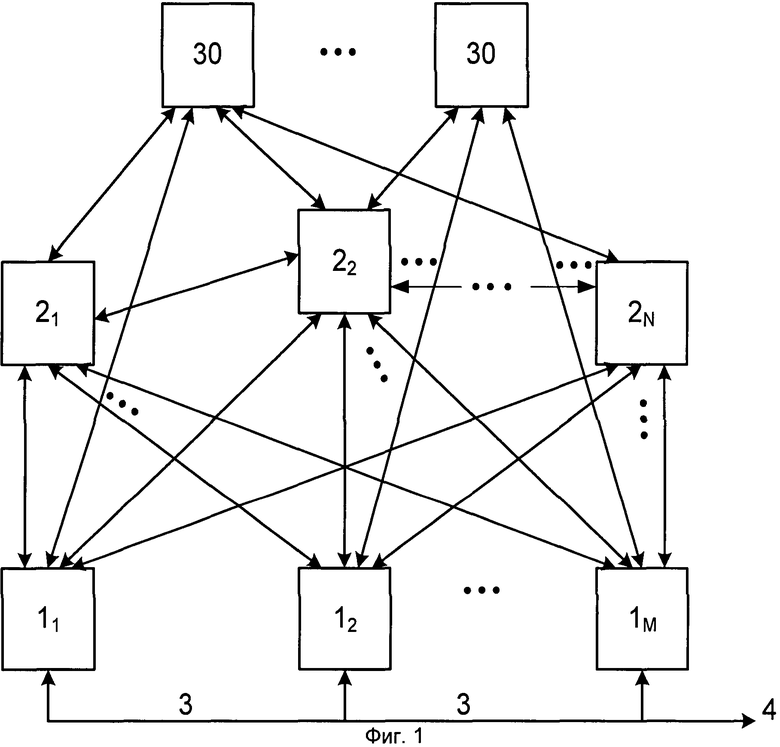
На фиг.1 представлена структурная схема системы радиосвязи с подвижными объектами, где обозначено:
1 - наземный комплекс;
2 - подвижный объект;
3 - наземная сеть передачи данных с входом/выходом 4 системы;
30 - спутник связи из созвездия спутников.
На фиг.2 представлены структурные схемы подвижного объекта 2 и наземного комплекса 1, входящие в состав системы радиосвязи с подвижными объектами, где обозначено:
5 - бортовой вычислитель;
6 - бортовые датчики;
7 - бортовой приемник сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS;
8 - блок регистрации данных;
9 - бортовая аппаратура передачи данных (АПД);
10 - бортовая радиостанция MB диапазона;
11 - бортовая антенна MB диапазона;
12 - наземная антенна MB диапазона;
13 - наземная радиостанция MB диапазона;
14 - наземная аппаратура передачи данных;
15 - вычислитель АРМ;
16 - наземный приемник сигналов глобальных навигационных спутниковых систем;
17 - монитор АРМ;
18 - пульт управления АРМ;
19 - анализатор типа принимаемых сообщений;
20 - двунаправленная шина системы управления подвижным объектом;
21 - бортовой блок хранения команд управления;
22 - наземный блок хранения команд управления;
23 - бортовая радиостанция ДКМВ диапазона;
24 - бортовая антенна ДКМВ диапазона;
25 - бортовая станция спутниковой связи;
26 - бортовая антенна бортовой станции спутниковой связи;
27 - модуль сопряжения;
28 - наземная антенна станции спутниковой связи;
29 - наземная станция спутниковой связи;
30 - спутник из созвездия спутников;
31 - наземный блок управления наземной антенной наземной станции спутниковой связи;
32 - бортовой блок управления бортовой антенной бортовой станции спутниковой связи;
33 - бортовой блок маршрутизации и оценки параметров радиоканалов связи;
34 - наземный блок маршрутизации и оценки параметров радиоканалов связи;
35 - наземная радиостанция ДКМВ диапазона;
36 - наземная антенна ДКМВ диапазона.
На фиг.2 показано на НК и ПО только по одному MB, ДКМВ и спутниковому каналу. В реальном случае их бывает несколько. В зависимости от важности ПО 2 их число может варьироваться. Известны НК 1, имеющие несколько десятков радиоканалов различных диапазонов [3].
Алгоритм работы системы радиосвязи с ПО 2 заключается в проведении непрерывного анализа в НК 1 и ПО 2 параметров радиоканалов связи, используемых для обмена данными между объектами системы, выбор из них с помощью блоков 33 и 5, 34 и 15 вероятностно оптимальных на данный момент времени частот, наземных комплексов, на которых соответствующие радиоканалы находятся, сообщение о них на все НК и обслуживаемые ПО и организация через них трафика на находящие в данном районе подвижные объекты.
Бортовые и наземные антенны MB диапазона ПО и НК соединены по эфиру в зоне оптической видимости, бортовые и наземные антенны ДКМВ диапазона соединены по эфиру в зоне обеспечения устойчивой связи.
Система радиосвязи с подвижными объектами работает следующим образом. В начальный момент времени в системе с помощью вычислителя 15 АРМ и соответствующего оператора анализируются все принимаемые сигналы от подвижных объектов 2 или спутника 30 из созвездия спутников и определяется местоположение подвижных объектов, на которые необходимо передать соответствующие сообщения. Для этого из меню на экране монитора 17 АРМ, сформированного на основе заложенных в наземный блок 22 хранения команд управления данных, выбирается соответствующее сообщение, контролируется в вычислителе 15 АРМ на логичность выполнения для конкретного подвижного объекта 2 и состояние его оборудования.
После проверки при нахождении подвижного объекта в зоне прямой видимости данные на него передаются через оборудование MB диапазона:
наземную АПД 14, узлы 13 и 12 на НК 1, узлы 11, 10 и 9 на ПО 2. Если ПО 2 находится за пределами радиогоризонта, необходимое сообщение передается по вероятностно оптимальным частотам радиоканалов различных диапазонов [5] параллельно через оборудование НК 1: узлы 14, 36, 35 - для ДКМВ канала, узлы 14, 29, 28 совместно с 31 -для спутникового канала на соответствующий ПО 2. Принятые на ПО 2 сигналы, пройдя через узлы 11, 10 и 9 для MB диапазона или узел 26 совместно с узлами 25, 32 - для спутникового канала, через узлы 24, 23, 9 - для ДКМВ канала, обрабатываются в бортовом вычислителе 5. В процессе обработки из нескольких приемных каналов выбирается наиболее достоверная информация, например, по отношению сигнал/шум. В наземном блоке 22 хранения команд управления заложены данные о всех действующих в системе командах управления подвижными объектами, а в блоке 21 - только команды управления, характерные для оборудования конкретного ПО 2. Затем принятые на ПО 2 сообщения обрабатываются в блоке 19 анализа типа сообщений. Если сообщение предназначено для данного ПО 2, то после анализа логичности выполняемых на ПО 2 операций в соответствии с текущим состоянием оборудования подвижного объекта и визуального контроля штурманом принятой команды управления (при необходимости) по экрану бортового блока 8 регистрации данных при «подсказке» с бортового вычислителя 5 и блока 33 решается вопрос о трансляции данных по двунаправленной шине 20 на систему управления ПО 2, не указанную на фигуре 2. Загрузка в память бортового вычислителя 5 необходимых данных, в том числе состава команд управления и плана связи, маршрута полета и других, осуществляется в виде системной таблицы при предполетной подготовке подвижного объекта 2 через вход/выход 4 наземной сети 3 передачи данных и радиоканал связи MB диапазона или по входу/выходу 20. Принимаемая на ПО 2i информация отображается на экране бортового блока 8 регистрации данных в виде буквенно-цифровых символов, точек и векторов или в другом виде. При выполнении команды управления на ПО 2 формируется донесение о ее выполнение и передается по нескольким радиоканалам связи на НК 1. На наземном комплексе 1 по принятому донесению вычислителем 15 АРМ и оператором дополнительно оцениваются параметры радиоканалов связи, местоположение ПО 2, текущая ситуация на ПО 2 и воздушная обстановка вокруг него и блоком 34 выбирается маршрут передачи информации получателю.
Сообщения о местоположении ПО 2 и параметрах его движения, например, с выходов приемника 7 сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS или с выходов инерциальных систем подвижного объекта, записываются в память вычислителей 5 и 15 (после приема и обработки в оборудовании НК 1 сообщений). В вычислителях 5 и 15 эти данные используются для расчета навигационных характеристик, параметров движения каждого ПО, формирования передаваемых радиосигналов в направлении на выбранный подвижный объект, оценки качества принимаемых в каналах связи сигналов и определения вероятностно оптимальной на данный момент времени частоты и наземного комплекса, на котором расположен этот канал. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 2 и параметрах его движения в вычислителе 5 в заданное время формируется соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 2. Это время используется в вычислителе 15 АРМ для известной операции построения экстраполяционных отметок от подвижных объектов 2 при отсутствии информации об их местоположении [5]. Кроме того, по адресу ПО 2 определяется его тип с помощью заложенных в память вычислителя 15 АРМ данных, число радиосредств на борту и в каких диапазонах они работают. На основании полученных сведений блоками 34 и 15 выдаются команды на блоки, формирующие соответствующие радиосигналы. Списки выделенных частот и заложенных в память вычислителей 5 и 15 меняются в зависимости от времени суток, с учетом сезонных ионосферных изменений и других факторов. В бортовой и наземной аппаратуре передачи данных 9 и 14 осуществляются известные операции: модуляции и демодуляции, кодирования и декодирования, сопряжения с узлами 5, 10, 23 - на ПО 2 и с узлами 15, 13 - на НК 1 соответственно и другие.
В ситуации, когда одно или несколько ПО 2 вышли за пределы прямой видимости с НК 1 осуществляется переход по взаимно увязанным во времени командам с бортового и наземного блоков 33 и 34 маршрутизации и оценки параметров радиоканалов связи через бортовой и наземный вычислители 5 и 15 на замену радиолинии связи MB диапазона на спутниковую радиолинию, состоящую из бортовой станции 25 спутниковой связи с антенной 26 и с соответствующим блоком 32 управления, в наземном комплексе 1 - из наземной станции 29 спутниковой связи с соответствующей антенной 28 и с соответствующим блоком 31 управления и на радиолинию связи ДКМВ диапазона, состоящую из бортовой радиостанции 23 ДКМВ диапазона, бортовой антенны 24 ДКМВ диапазона и в наземном комплексе 1 - наземной радиостанции 35 ДКМВ диапазона, наземной антенны 36 ДКМВ диапазона. Привязка ко времени этих команд осуществляется с помощью меток глобального времени, поступающих в вычислители 5 и 15 АРМ с выходов приемников 7 и 16 сигналов глобальных навигационных спутниковых систем.
Для увеличения достоверности передачи данных в условиях помех на подвижные объекты, находящиеся за пределами прямой видимости с НК 1, при использовании радиолинии ДКМВ диапазона в системе (оборудовании радиоканалов связи: блоках 10, 11, 23, 24, 25, 26, 32 на ПО 2, блоках 12, 13, 35, 36, 28, 29, 31 на НК 1, вычислителях 5 и 15 АРМ, бортовой и наземной аппаратуре передачи данных 9 и 14 и других узлах) используются известные технологии разнесения по пространству и частоте, пространственного сложения мощностей, использование секторных передающих антенн с направленными диаграммами и другие [3, 6]. Если из-за помех или замирания радиосигналов на ПО 2 сообщение не принято, а принято на соседнем подвижном объекте, находящемся в зоне прямой видимости от первого ПО 2 и осведомленном о текущей воздушной ситуации по сообщениям с НК 1, то после достоверного приема информации по ДКМВ или спутниковому каналу на втором ПО с помощью блоков 33 и 5 сигнал ретранслируется на первое ПО 2 через узлы 9, 10, 11, образующие бортовую часть радиолинии MB диапазона. При отсутствии сведений о точном местонахождении подвижных объектов 2 используются методы экстраполяции по точке «последней связи» и известных параметрах их движения или по известному плану (маршруту) полета. Каждый из ПО 2 может выходить на связь на нескольких рабочих частотах, известных всем участникам движения, и работать одновременно с несколькими разнесенными наземными комплексами. При обнаружении помех в одном из каналов на ПО 2 с помощью блоков 33 и 15 и бортового радиосвязного оборудования формируются сообщения об этом и передаются на НК 1 и ПО 2, находящиеся в этом районе, для перехода на резервные частоты или режим с псевдослучайной перестройкой частоты. Аналогичные операции проводятся при обнаружении помех на НК 1. Для повышения достоверности передачи сообщений в ДКМВ диапазоне при наличии помех и замираний может быть использован метод пространственного сложения мощностей, при котором на одном НК 1 передатчиками радиостанций на рабочей частоте (желательно не в частотной области помех) формируются радиосигналы, которые излучаются в направлении на выбранный ПО 2 с наземных антенн ДКМВ диапазона, разнесенных на расстояние более 10 длин волн для обеспечения декорреляции принимаемых на ПО 2 радиосигналов и выделения их из помех. В ДКМВ диапазоне НК и ПО работают в зоне обеспечения устойчивой связи, которое подразумевает выполнение системой заданного уровня устойчивости передачи сообщений.
В бортовом и наземном вычислителях 5 и 15 хранятся предварительно заложенные таблицы со списками, местоположением и параметрами наземных комплексов 1, подвижных объектов 2, заданными маршрутами полета и наборами назначенных им частот. Каждый НК. 1 периодически излучает сигналы управления/синхронизации/связи, используемые на ПО 2 в качестве маркеров, на всех назначенных ему частотах, На ПО 2 по принятым по нескольким каналам маркерам определяется НК 1, параметры радиосигналов которого принимаются наиболее устойчиво, и с ним начинается обмен данными. Принимаемые на ПО 2 радиосигналы используются для оценки параметров каналов связи разных диапазонов. Для установления линии связи с НК 1 в бортовом вычислителе 5 ПО 2 автоматически анализируются принимаемые сигналы управления/синхронизации/связи от наземных комплексов 1 на всех заранее известных частотах и выбираются лучшие частоты, например, по отношению сигнал/помеха или величине мощности принимаемого сигнала и наземные комплексы 1 для реализации известного принципа адаптации по частоте и пространству. По измеренному отношению сигнал/помеха, в бортовом вычислителе 5 ПО 2 выбирается тип загоризонтной радиолинии связи, скорость передачи данных, а также виды модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется всеми НК 1 и ПО 2 каждый раз при приеме информационного сообщения или сигнала управления/синхронизации/связи. Сведения об оптимальном на данный момент времени канале сообщаются на противоположную сторону в виде рекомендуемых частоты и скорости передачи данных, а также на все другие НК 1 и ПО 2, находящиеся в этом районе. В бортовой и наземной АПД 9 и 14 при работе в ДКМВ диапазоне могут быть использованы известные алгоритмы, например, высокоскоростных адаптивных модемов, рассчитанных на работу в каналах с многолучевостью и замираниями. Для повышения достоверности приема информации может быть использован помехоустойчивый код, например, циклический.
В вычислителе 15 АРМ выполняется операции переформатирования кодограммы из формата канала «воздух-земля» в формат наземной сети 3 передачи данных с запоминанием в базе данных и из формата наземной сети 3 передачи данных в формат канала «воздух-земля» с запоминанием в базе данных, обеспечивается взаимодействие с модулем 27 сопряжения по передаче/приему кодограмм в формате наземной сети 3 передачи данных, формируется управляющий сигнал завершения приема соответствующей команды управления или сообщения с источника информации и с помощью блока 34 выбирается маршрут передачи необходимой команды или сообщения.
При одновременном обнаружении в НК 1 радиосигналов от разных ПО 2 в вычислителе 15 АРМ (по возможности) обрабатываются все сигналы. По принятым радиосигналам вычислителем 15 АРМ формируется ответ в порядке поступления или в зависимости от приоритета сообщения и в соответствии с проведенной блоком 34 оценкой формируется маршрут доставки информации получателю. Третий вход/выход вычислителя 15 АРМ используется для обмена данными управления и контроля с наземной станцией спутниковой связи 29. В вычислителе 15 АРМ всех НК 1 осуществляется непрерывный анализ передаваемых и принимаемых данных,, совместная обработка их, выработка решения и выдача в следующих сообщениях (при необходимости) на подвижные объекты 2 рекомендаций по проведению последующих действий.
Ведущий НК 1, кроме рассмотренных выше операций, выполняет функцию управления процессами, происходящими в системе. К функциям ведущего НК 1 добавляются операции управления частотами, таблицей состояния и регистрации ПО 2, системной таблицей, конфигурацией, качеством передачи данных в условиях помех, обработкой сигналов дистанционной диагностики. С вычислителя 15 АРМ через модуль сопряжения 27, вход/выход 4 наземной сети 3 передачи данных обеспечивается интерфейс с расположенными на земле источниками (получателями) информации системы и программирование бортовых вычислителей 5 подвижных объектов 2 на аэродроме во время предполетной подготовки. Синхронизация работы наземной сети 3 передачи данных осуществляется, например, на основе использования всеми абонентами - участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы.
Для взаимодействия наземных комплексов 1, оконечных пользователей и ПО 2 используется наземная сеть 3 передачи данных. Она может быть реализована различными известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [3]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное пользователем определенному ПО 2 на тот наземный комплекс 1, на котором данный ПО 2 «зарегистрирован», и где в данный момент времени обеспечиваются оптимальные условия приема.
Предложенное техническое решение позволяет увеличить достоверность передачи сообщений и адаптировать оборудование системы при воздействии помех и замираний радиосигналов за счет комплексирования и обработки данных, принятых от нескольких НК по MB, ДКМВ и спутниковым радиолиниям, разнесения каналов по пространству и частоте, пространственного сложения мощностей.
На момент подачи заявки разработаны алгоритмы функционирования и фрагменты соответствующего программного обеспечения заявляемой системы радиосвязи. Узлы (шины) 1-32, 35, 36 одинаковые с прототипом. Бортовая станция спутниковой связи 25, бортовая антенна станции спутниковой связи 26 и блок управления бортовой антенной бортовой станции спутниковой связи 32 могут быть реализованы на серийном оборудовании бортовой станции спутниковой связи «Багет-К». Наземная станция спутниковой связи 29, наземная антенна станции спутниковой связи 28 и блок управления 31 антенной могут быть реализованы на серийном оборудовании наземной станции спутниковой связи Р-441-0. Вводимые бортовой и наземный блоки 33 и 34 маршрутизации и оценки параметров радиоканалов связи могут быть выполнены программно соответственно с помощью серийных ЭВМ типов «Багет-55» и «Багет-01-07» ЮКСУ.466225.001 соответственно. Вычислители 5 на ПО 2, 15 АРМ на НК 1 могут быть выполнены, например, на плате процессорной 5066-586-133MHz-1 MB, 2 MB Flash CPU Card фирмы Octagon Systems и ЭВМ типа «Багет-01-07» ЮКСУ.466225.001 соответственно. В качестве антенн для подвижного объекта может быть использованы серийные типовые самолетные килевые пазовые антенны типа "Щель", а для НК - набор типовых полуволновых вибраторов или ФАР. В качестве модуля сопряжения 27 может быть использована плата Х.25.
ЛИТЕРАТУРА
1. Патент РФ №52290 U1. М. кл. Н04В 7/26, 2006.
2. Патент РФ №82971 U1. М. кл. Н04В 7/26, 2009.
3. Б.И. Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM. Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
4. Патент РФ №106062 U1. М. кл. Н04В 7/26, 2011 (прототип).
5. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.; Сов. Радио, 1971, 367 с.
6. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2686456C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СПОСОБ И СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2020 |
|
RU2744672C1 |
Изобретение относится к области радиотехники, а именно к радиосистемам обмена данными, и может быть использовано для информационного обмена между подвижными объектами, наземными комплексами. Технический результат заключается в повышении достоверности передачи сообщений на удаленный подвижный объект, находящийся за горизонтом, при наличии помех и замирании радиосигналов. Для этого система содержит наземные комплексы, подвижные объекты, спутники связи созвездия спутников, наземную сеть передачи данных; в состав наземных комплексов входят антенны и радиостанции MB и ДКМВ диапазонов, аппаратура передачи данных, автоматизированное рабочее место (АРМ) с вычислителем, приемник сигналов навигационных спутниковых систем, пульт управления АРМ, монитор АРМ, блок управления наземной антенной, станция спутниковой связи, радиостанция ДКМВ диапазона, модуль сопряжения, блок хранения команд управления; в состав подвижных объектов входят датчики, приемник сигналов навигационных спутниковых систем, анализатор типа принимаемых сообщений, вычислитель, двунаправленная шина системы управления подвижным объектом, станция спутниковой связи с антенной, блок регистрации данных, аппаратура передачи данных, радиостанции и антенны MB и ДКМВ диапазонов, блок хранения команд управления; причем в систему дополнительно введены бортовой и наземный блоки маршрутизации и оценки параметров радиоканалов связи с ответствующими алгоритмами работы. 2 ил.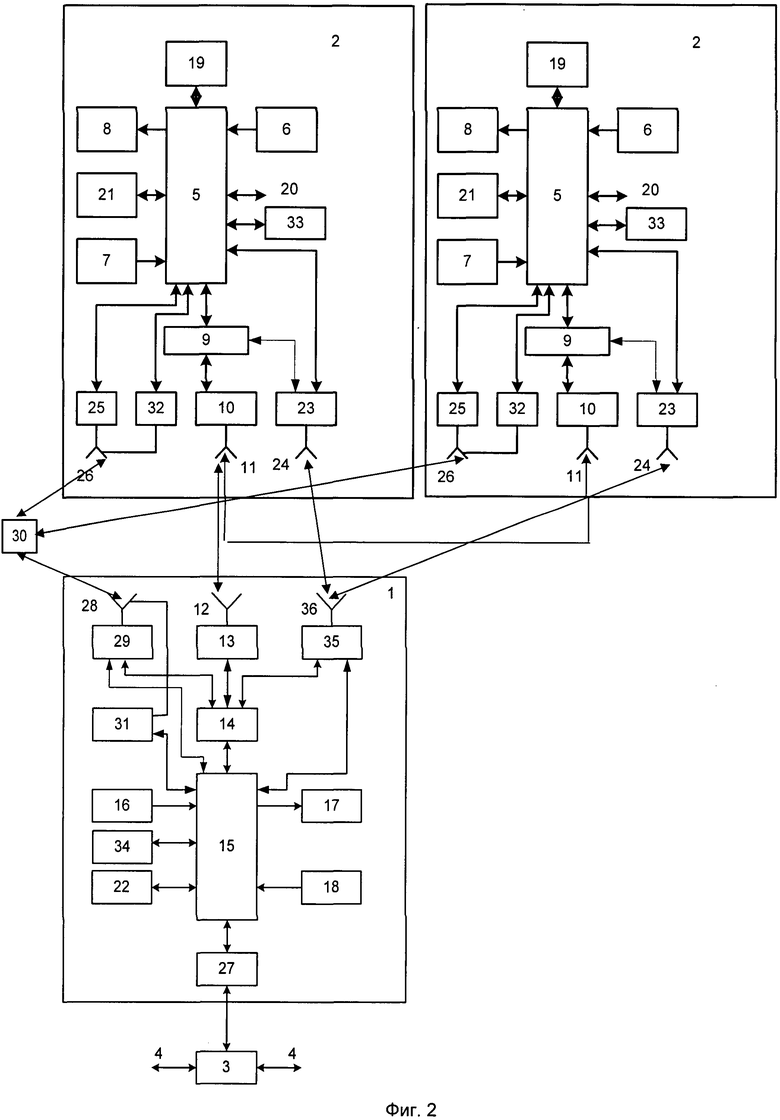
Система радиосвязи с подвижными объектами (ПО), состоящая из М наземных комплексов (НК), соединенных радиоканалами связи с N подвижными объектами (ПО) как непосредственно, так и через соответствующие спутники связи из созвездия спутников, а между собой наземные комплексы соединены с помощью наземной сети передачи данных с входом/выходом системы, причем наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, которые подключены двухсторонними связями через наземную аппаратуру передачи данных (АПД) к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), первый вход которого подключен к приемнику сигналов навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, второй и третий входы/выходы вычислителя АРМ подключены к входам/выходам наземного блока управления наземной антенной наземной станции спутниковой связи и наземной станции спутниковой связи соответственно, пятый вход/выход которого подключен к управляющему входу/выходу наземной радиостанции ДКМВ диапазона, модуль сопряжения подключен двухсторонними связями к четвертому входу/выходу вычислителя автоматизированного рабочего места, выход наземного блока управления наземной антенной наземной станции спутниковой связи соединен с входом управления наземной антенны наземной станции спутниковой связи, наземный блок хранения команд управления, вход/выход которого соединен двухсторонними связями с соответствующим входом/выходом вычислителя АРМ, в состав каждого из подвижных объектов входят бортовые датчики, приемник сигналов навигационных спутниковых систем и анализатор типа принимаемых сообщений, каждый из которых соединен с соответствующими входами бортового вычислителя, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, второй вход/выход через последовательно соединенные бортовую станцию спутниковой связи, бортовую антенну бортовой станции спутниковой связи, соответствующий спутник связи из созвездия спутников, наземную антенну наземной станции спутниковой связи соединен с наземной станцией спутниковой связи, третий вход/выход через блок управления бортовой антенной бортовой станции спутниковой связи соединен непосредственно с бортовой антенной бортовой станции спутниковой связи, бортовой вычислитель соединен с входом блока регистрации данных и через последовательно соединенные бортовую аппаратуру передачи данных, бортовую радиостанцию MB диапазона подключен к бортовой антенне MB диапазона, первый и второй входы/выходы бортовой радиостанции ДКМВ диапазона подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя и бортовой аппаратуры передачи данных соответственно, а третий вход/выход - к бортовой антенне ДКМВ диапазона, бортовой блок хранения команд управления, вход/выход которого соединен двухсторонними связями с соответствующим входом/выходом бортового вычислителя, отличающаяся тем, что в нее введены бортовой и наземный блоки маршрутизации и оценки параметров радиоканалов связи, причем вход/выход наземного блока маршрутизации и оценки параметров радиоканалов связи соединен двухсторонними связями с соответствующим входом/выходом вычислителя АРМ, вход/выход бортового блока маршрутизации и оценки параметров радиоканалов связи соединен двухсторонними связями с соответствующим входом/выходом бортового вычислителя, антенны MB диапазона подвижных объектов, находящихся в зоне прямой видимости, по эфиру связаны между собой.
| Управляемый полупроводниковый выпрямитель | 1955 |
|
SU106062A1 |
| Устройство для охлаждения газа в скважинах подземного газогенератора | 1949 |
|
SU77738A1 |
| Способ укладки кабеля, питающего подвижной электроагрегат и устройство для осуществления этого способа | 1957 |
|
SU115592A1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| US 2008170536 A1, 17.07.2008. | |||

