Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена между источниками (получателями) информации, расположенными на подвижных объектах (ПО), и получателями (источниками) информации, расположенными на земле, через наземные комплексы (НК).
В системе радиосвязи с подвижными объектами [1], во время движения подвижные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом связи. Принимаемые наземным комплексом связи из канала «Воздух-Земля» сообщения через аппаратуру передачи данных (АПД) поступают в вычислитель автоматизированного рабочего места (АРМ) оператора связи на базе ПЭВМ, где в соответствии с принятым в системе протоколом обмена, производится идентификация принятого в сообщении адреса с адресами подвижных объектов, хранящимися в его памяти. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения непрерывной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи, определяют программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяют оптимальные пути доставки сообщений к удаленному от НК за радиогоризонт ПО. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладывают номер ПО, назначенного ретранслятором, и адреса воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые на ПО сообщения анализируют в блоке анализа типа сообщений. После анализа решают вопрос о направлении данных по двунаправленной шине в систему управления подвижного объекта или ретрансляции их на соседний ПО.
В обычном режиме, когда не требуется ретрансляция сигналов с НК, осуществляют адресный опрос ПО путем формирования сообщения для передачи в канал радиосвязи в соответствии с протоколом обмена. Набираемое оператором (диспетчером) сообщение отображают на мониторе АРМ. На ПО после прохождения через антенну, радиостанцию, аппаратуру передачи данных сигнал подают в бортовой вычислитель, где производят идентификацию принятого в сообщении адреса с собственным адресом подвижного объекта. Далее сообщение передают в блок анализа типа ретранслируемого сообщения, где производят дешифрацию полученного заголовка (служебной части) сообщения и определяют, в каком режиме должна работать аппаратура ПО. Информационную часть сообщения записывают в память бортового вычислителя и при необходимости выводят на экран блока регистрации данных.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» (CPDLC) взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляют на блоке регистрации данных ПО и мониторе АРМ НК соответственно.
Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записывают в память наземного и бортового вычислителей с привязкой к глобальному времени и используют для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатывают в вычислителе и выводят на экран монитора АРМ.
Однако в указанной выше системе имеются недостатки, связанные с низкой аппаратной надежностью и достоверностью передачи информации из-за отсутствия резервирования.
Известна система радиосвязи с подвижными объектами [2]. Она отличается от упомянутой выше системы тем, что в ней дополнительно введены наземные и бортовые антенны и радиостанции ДКМВ дальней связи. Система радиосвязи с подвижными объектами [2] имеет в своем составе N подвижных объектов (ПО), связанных каналами MB радиосвязи «Воздух-Воздух» между собой, связанных каналами MB радиосвязи «Воздух-Земля» и каналами ДКМВ радиосвязи «Воздух-Земля» с М территориально разнесенными наземными комплексами (НК), которые соединены между собой и с соответствующими диспетчерскими пунктами управления воздушным движением и авиалиниями через систему наземной связи.
В состав наземного комплекса связи входят наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен в управляющему входу радиостанции ДКМВ, третий вход/выход подключен к входу/выходу наземной системы связи, первый вход подключен к приемнику сигналов навигационных спутниковых систем (ГЛОНАС/GPS), второй вход подключен к пульту управления АРМ, третий вход - к формирователю типа ретранслируемых сообщений, а выход - к монитору АРМ.
Подвижный объект оснащен бортовым комплексом связи, в состав которого входят бортовые антенны MB и ДКМВ диапазонов, подключенные к радиостанциям MB и ДКМВ диапазонов, соответственно, которые соединены двухсторонними связями через бортовую аппаратуру передачи данных с первым входом/выходом бортового вычислителя, второй вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, третий вход/выход - к анализатору типа принимаемых сообщений, четвертый вход/выход - к управляющему входу/выходу радиостанции ДКМВ, входы - к бортовым датчикам, формирователю типа ретранслируемых сообщений, приемнику сигналов навигационных спутниковых систем, выход - к блоку регистрации данных.
Передачу данных в MB диапазоне с НК обеспечивают по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передачу данных с N-го ПО на НК осуществляют в обратном порядке. Наземную сеть передачи данных подключают двухсторонними интерфейсами к каждому из М разнесенных территориально НК. Таким образом, наземной сетью передачи данных по информационному взаимодействию объединяют между собой все НК и обеспечивают соединение каждого НК с наземными пользователями системы связи, например, диспетчерскими пунктами (ДП) управления воздушным движением (УВД) и оперативного авиационного контроля (OAK).
Передачу данных «Воздух-Земля» в MB диапазоне между ПО и НК осуществляют на рабочей частоте, назначаемой для каждого НК. Передачу данных «Воздух-Воздух» в MB диапазоне между ПО осуществляют на рабочей частоте «Воздух-Воздух». Список частотной поддержки MB связи, содержащий список М наземных комплексов с их адресами, координатами, назначенными им частотами, а также частотой связи «Воздух-Воздух», доводят по наземной сети передачи данных до каждого НК, а также во время предполетной подготовки до каждого ПО.
Передачу данных в ДКМВ диапазоне между ПО и НК осуществляют на рабочей частоте, назначаемой для каждого НК по результатам долгосрочного прогноза на каждые 2 часа. По долгосрочному прогнозу разрабатывают таблицу частотно-временного расписания ДКМВ связи для каждого НК на сутки и доводят до НК по наземной сети передачи данных. Системную таблицу ДКМВ связи, содержащую список М наземных комплексов НК с их координатами, адресами и таблицами их частотно-временного расписания доводят до каждого ПО во время предполетной подготовки через наземную сеть передачи данных. Воздушное пространство разбивают на информационные районы полета (ИРП) размером 1000-1200 км. В каждом ИРП располагают, хотя бы один НК, ответственный за информационное обеспечение полетом. Связь с НК каждого ПО, находящегося в зоне ответственности данного НК, осуществляют в MB диапазоне или в ДКМВ диапазоне в зависимости от удаления ПО от НК. В зоне прямой радиовидимости (до 200-300 км) связь обеспечивают в MB диапазоне, за пределами прямой видимости, если не удается увеличить радиус зоны управления до 1000-1200 км с помощью ретрансляции по каналам «Воздух-Воздух» MB диапазона, связь организуют в ДКМВ диапазоне.
В ДКМВ диапазоне для передачи данных используют традиционные не адаптивные модемы с защитным интервалом для борьбы с многолучевостью, которые обеспечивают символьную скорость 75, 150, 300 бит/с и скорость передачи данных пользователя, не превышающую 18, 37, 75 бит/с с учетом кодирования Рида-Соломона с четырехкратной избыточностью. Для ведения ДКМВ связи используют частоту из таблицы частотно-временного расписания НК, в зоне ответственности которого находится ПО.
Как и в предыдущем аналоге в этой системе имеются недостатки, связанные с низкой аппаратной надежностью радиостанций и соответственно низкой достоверностью передачи информации из-за отсутствия резервирования.
Наиболее близкой по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [3], которая принята за прототип. Система радиосвязи с ПО содержит М территориально разнесенных наземных комплексов связи и N подвижных воздушных объектов, оснащенных бортовыми комплексами связи, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а с помощью каналов радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов с М наземными комплексами, которые объединены между собой и наземными пользователями, например, диспетчерские пункты и другие объекты гражданской авиации, с помощью своих входов/выходов и входов/выходов наземной сети передачи данных.
N подвижных воздушных объектов содержат радиоканал, состоящий из b бортовых широкодиапазонных антенно-фидерных устройств (ШД АФУ) подключенных двунаправленными связями к b бортовым широкодиапазонным радиочастотным модулям, которые связаны с модулем физического уровня, который в свою очередь имеет двухсторонний цифровой интерфейс с модулем канального уровня, связанным двухсторонним цифровым интерфейсом с модулем маршрутизации, подключенным двухсторонним цифровым интерфейсом к модулю интерфейсов, входы которого подключены к бортовым датчикам, приемнику глобальной навигационной спутниковой системы, а выход подключен к блоку регистрации данных, второй вход/выход подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений, четвертый вход/выход - к первому бортовому вычислителю, который связан с помощью двунаправленного интерфейса с бортовой системой управления ПО. Число b указывает на необходимое для получения заданных показателей надежности число пар соединенных между собой бортовых широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей.
В НК наземные антенны MB и ДКМВ диапазонов связаны соответственно с радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, четвертый вход/выход к радиостанции ДКМВ диапазона, пятый вход/выход к радиостанции MB диапазона, первый вход подключен к приемнику сигналов глобальных навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту управления АРМ, а выход - к монитору АРМ.
Недостатки прототипа заключаются в том, что, несмотря на то, в ПО бортовые широкодиапазонные антенно-фидерные устройства и широкодиапазонные радиочастотные модули зарезервированы остальные модули: модуль физического уровня, модуль канального уровня, модуль маршрутизации, модуль интерфейсов с бортовым оборудованием и бортовой вычислитель включены последовательно, следовательно, выход из строя одного из этих узлов или любой сбой программного обеспечения в этих узлах при цифровой обработке сигналов приведет к прерыванию прохождения сообщений на систему управления ПО и возвращения донесений об их исполнении потребителю данных.
Задачей, на решение которой направлено заявляемое изобретение, является повышение аппаратурной надежности бортового оборудования и надежности связи.
Поставленная задача решается за счет введения второго радиоканала и параллельно работающих вторых бортовых вычислителей, которые непрерывно контролируют процессы цифровой обработки данных и качество информации в узлах радиоканалов и направляют на систему управления по шине, связанной с системой управления ПО, информацию именно с того радиоканала, сообщения с которого в данный момент времени наиболее достоверны.
Указанный технический результат достигается тем, что в известной системе радиосвязи с подвижными объектами, имеющей в своем составе М территориально разнесенных наземных комплексов и N подвижных объектов, связанных между собой каналами радиосвязи MB диапазона, а с помощью каналов радиосвязи MB и ДКМВ диапазонов - с М наземными комплексами, которые связаны между собой через наземную сеть передачи данных, каждый подвижный объект которой содержит радиоканал в составе: бортовой вычислитель, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, b пар соединенных между собой бортовых широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, входы/выходы которых двусторонними связями подключены к модулю физического уровня, подключенного к вычислительному модулю связи, состоящему из последовательно соединенных двунаправленными связями модуля канального уровня, модуля маршрутизатора и модуля интерфейса, входы которого подключены к бортовым датчикам, приемнику глобальной навигационной спутниковой системы, выход - к блоку регистрации данных, а первый вход/выход - к бортовому анализатору типа принимаемых сообщений, второй вход/выход - к бортовому формирователю типа ретранслируемых сообщений, третий вход/выход - к бортовому вычислителю, где b - необходимое для получения заданных показателей надежности число пар соединенных между собой бортовых широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, а каждый наземный комплекс которой содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, первый вход подключен к приемнику сигналов глобальных навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту управления АРМ, а выход - к монитору АРМ, четвертый вход/выход вычислителя автоматизированного рабочего места подключен к первому к управляющему входу наземной радиостанции ДКМВ диапазона, а пятый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции MB диапазона, в подвижный объект введены оборудование второго радиоканала, два параллельно работающих вторых бортовых вычислителя, связанных между собой двухсторонними связями и подключенных двухсторонними связями к первым бортовым вычислителям, модулям интерфейсов с бортовым оборудованием, модулям маршрутизации, модулям канального уровня, модулям физического уровня и широкодиапазонным радиочастотным модулям каждого из двух радиоканалов.
Структурная схема заявляемой системы радиосвязи с подвижными объектами представлена на фиг.1, где введены обозначения:
1 - наземный комплекс связи (НК 1);
2 - вход/выход НК 1 для наземной сети передачи данных;
3 - подвижный объект (ПО 3), оснащенный новым бортовым комплексом связи, структурная схема которого приведена на фиг.2;
4 - вход/выход наземной сети передачи данных, которая условно показана на фигуре 1 в виде линии.
Система радиосвязи с ПО содержит М территориально разнесенных наземных комплексов связи 1, структурная схема которых приведена на фиг.3, и N подвижных объектов 3, оснащенных бортовыми комплексами связи, структурная схема которых представлена на фиг.2, связанных между собой каналами 29 связи в зависимости от места нахождения ПО. Если подвижные объекты находятся в одной среде: в воздухе, в море или на Земле, то они связаны между собой каналами 29 связи прямой видимости MB диапазона «Воздух-Воздух», «Море-Море», «Земля-Земля» соответственно. При нахождении ПО 3 в разных средах они связаны между собой каналами 29 связи прямой видимости MB диапазона «Море-Воздух», «Земля-Воздух» или «Море-Земля». Наземные комплексы 1 связаны с ПО 3 каналами 30 связи прямой видимости MB диапазона и каналами загоризонтной связи 31 ДКМВ диапазона «Воздух-Земля» и «Море-Земля». М наземных комплексов 1 объединены между собой и наземными пользователями, например, диспетчерскими пунктами и другими объектами гражданской авиации, не указанными на фиг.1, с помощью своих входов/выходов 2 и входов/выходов 4 наземной сети передачи данных.
Структурная схема бортового оборудования подвижного объекта 3 заявляемой системы радиосвязи с подвижными объектами, приведена на фиг.2, где введены обозначения:
5 - первый бортовой вычислитель;
6 - бортовые датчики;
7 - бортовой приемник сигналов глобальной навигационной спутниковой системы, например, ГЛОНАСС/GPS с антенной;
8 - блок регистрации данных;
9 - бортовой анализатор типа принимаемых сообщений;
10 - бортовой формирователь типа ретранслируемых сообщений;
11 - вычислительный модуль связи (ВМС);
12 - модуль интерфейсов с бортовым оборудованием (МИ);
13 - модуль маршрутизации (ММ);
14 - модуль канального уровня (МКУ);
15 - модуль физического уровня (МФУ) (цифровой обработки сигналов);
16 - бортовой широкодиапазонный радиочастотный модуль (ШД РМ);
17 - бортовое широкодиапазонное антенно-фидерное устройство (ШД АФУ);
18 - двунаправленная шина системы управления подвижным объектом;
32 - второй бортовой вычислитель.
На фиг.2 приведены для примера 2 из b пар связанных между собой модулей 16 и 17 каждого из двух радиоканалов, а также пара связанных между собой вторых бортовых вычислителей 32, подключенных двухсторонними связями к каждому из двух первых бортовых вычислителей 5 и узлов 12-16.
Причем, в каждом из двух радиоканалов, состоящих из узлов 5-10, 12-14, объединенных в узле 11, 15-17 и шины 18, b бортовых широкодиапазонных антенно-фидерных устройства 17 (ШД АФУ) подключены двунаправленными радиочастотными кабелями к b бортовым широкодиапазонным радиочастотным модулям 16, которые связаны с модулем 15 физического уровня, который имеет двухсторонний цифровой интерфейс с модулем 14 канального уровня, связанным двухсторонним цифровым интерфейсом с модулем 13 маршрутизации, подключенным двухсторонним цифровым интерфейсом к модулю 12 интерфейсов, входы которого подключены к бортовым датчикам 6, приемнику 7 навигационной спутниковой системы, выход подключен к блоку 8 регистрации данных, второй вход/выход подключен к бортовому анализатору 9 типа принимаемых сообщений, третий вход/выход - к бортовому формирователю 10 типа ретранслируемых сообщений, четвертый вход/выход - к первому бортовому вычислителю 5, каждый из которых связан с помощью двунаправленного интерфейса 18 с бортовой системой управления ПО 3 и с входами/выходами каждого из двух вторых бортовых вычислителей 32.
Структурная схема наземного комплекса связи 1 заявляемой системы радиосвязи с подвижными объектами представлена на фиг.3, где обозначено:
19 - наземная антенна MB диапазона;
20 - наземная радиостанция MB диапазона;
21 - наземная антенна ДКМВ диапазона;
22 - наземная радиостанция ДКМВ диапазона;
23 - наземная аппаратура передачи данных (АПД);
24 - вычислитель автоматизированного рабочего места (АРМ);
25 - наземный приемник сигналов глобальных навигационных спутниковых систем с антенной;
26 - формирователь типа ретранслируемых сообщений;
27 - монитор АРМ;
28 - пульт управления АРМ;
2 - вход/выход НК 1 для наземной сети передачи данных.
В НК 1 наземные антенны 19 MB и 21 ДКМВ диапазонов связаны соответственно с радиостанциями 20 MB и 22 ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных 23 к первому входу/выходу вычислителя 24 автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу 2 НК 1 для наземной сети передачи данных, третий вход/выход - к формирователю 26 типа ретранслируемых сообщений, четвертый вход/выход к радиостанции 22 ДКМВ диапазона, пятый вход/выход к радиостанции 20 MB диапазона, первый вход подключен к приемнику 25 сигналов глобальных навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту 28 управления АРМ, а выход - к монитору 27 АРМ.
Система радиосвязи с подвижными объектами работает следующим образом. Передачу данных в MB диапазоне с НК 1 осуществляют по цепочке последовательно соединенных первого ПО 3, второго ПО 3 и далее до N-го ПО 3, а передачу данных с N-го ПО 3 на НК 1 осуществляют в обратном порядке. Передачу данных в ДКМВ диапазоне с ПО 3 осуществляют на НК 1, качество сигнала маркера которого в данный момент времени является наилучшим или приемлемым для данного ПО 3. Наземную сеть передачи данных подключают двухсторонними интерфейсами 2 к каждому из М разнесенных территориально НК 1. Таким образом, наземной сетью передачи данных по информационному взаимодействию объединяют между собой все НК 1 и обеспечивают соединение каждого НК 1 с наземными пользователями системы радиосвязи.
Алгоритм обмена данными в заявляемой системе радиосвязи с ПО заключается в том, что в ней проводят следующие операции:
- для обеспечения надежности связи в MB и ДКМВ диапазонах прием/передачу сигналов осуществляют одновременно по двум радиоканалам, состоящим из узлов 5-10, 12-14, объединенных в узле 11, 15-17 и шины 18, процессы обработки данных и качество информации в которых контролируется в параллельно работающих вторых бортовых вычислителях 32 и на систему управления по шине 18 (после воздействия узлов 32 на соответствующий первый бортовой вычислитель 5) выбирается информация именно с того радиоканала, сообщения с которого в данный момент времени наиболее достоверны;
- для обеспечения надежности связи в ДКМВ диапазоне не хуже 99% в зоне ответственности каждого НК 1 из общего списка ДКМВ частот, выделяемых для системы связи с ПО 3, каждому НК 1 назначают свой набор разрешенных частот ДКМВ связи на сутки и более;
- для каждого НК 1 на каждый временной интервал длительностью 1-2 часа назначают активную ДКМВ частоту из набора разрешенных НК частот, оптимальную по условиям распространения радиоволн и электромагнитной совместимости для данного временного интервала, отличающуюся от активных частот всех других НК 1 системы связи. Доводят номер активной частоты вместе с интервалом времени ее активизации до каждого НК 1 через наземную сеть передачи данных, реализуя, таким образом, протокол множественного доступа с частотным разделением (FDMA). Активизируют для каждого НК 1 только одну частоту из набора разрешенных частот, которую используют многими ПО 3 одновременно в режиме передачи данных HFDL с множественном доступом к каналу с временным разделением (TDMA), при котором первый слот кадра используют для излучений каждым НК 1 сигналов связи/управления/синхронизации (сквиттеров), называемых маркерами;
- каждой разрешенной ДКМВ частоте назначают свой временной сдвиг первого кадра протокола множественного доступа к каналу с временным разделением (TDMA) относительно ведущего кадра, привязанного к 00 час 00 мин 00 сек универсального координированного времени UTC для того, чтобы сигналы маркеров на разных частотах излучались НК 1 в разнесенных временных слотах для уменьшения времени анализа качества маркеров, производимого каждым подвижным объектом 3;
- разрабатывают системную таблицу ДКМВ связи, в которой указывают список М наземных комплексов связи 1 с их адресами, координатами, поддерживаемыми ими режимами работы, например, HFDL (ACARS, ATN, ISO 8208, RLS, DLS) и набором разрешенных частот с указанными сдвигами первого кадра каждой частоты;
- доводят системную таблицу ДКМВ связи до всех НК 1 и всех ПО 3 по наземной сети передачи данных;
- для обеспечения передачи данных по MB каналу разрабатывают список частотной поддержки MB связи, в котором указывают список М наземных комплексов связи 1 с их адресами, координатами, поддерживаемыми ими режимами работы в MB канале связи, например, ACARS, VDL-2, VDL-4, VDL-3, ISO 8208, наборами разрешенных для каждого НК 1 частот MB связи, доводят список частотной поддержки до каждого ПО 3 через систему наземной связи;
- на каждом НК 1 осуществляют обмен пакетными данными через наземную сеть передачи данных с пользователями системы связи - диспетчерскими пунктами, а также с другими (М-1) НК 1;
- в наземной аппаратуре передачи данных 23 реализуют протоколы обмена данными в ДКМВ и MB каналах физического уровня (модемов-кодеков), канального и сетевого уровня, например, в соответствии с ARINC 618, 631, 635, 750, DO-224, ED-108 в режимах HFDL, VDL-1 (ACARS), VDL-2, VDL-4;
- для обеспечения ДКМВ связи время использования каждого ДКМВ частотного канала разбивают на временные кадры заданной длительностью, а каждый кадр разбивают на несколько временных слотов для реализации протокола множественного доступа к каналу с временным разделением (TDMA). В первом слоте каждого кадра излучают сигнал маркера, содержащий квитанции на все сообщения, принятые НК 1 от разных ПО 3 в последующих двух кадрах, активные частоты двух соседних НК 1, версию базы данных (системной таблицы), назначения использования оставшихся слотов текущего кадра и слотов 2-го и 3-го следующего кадра, а также флаг занятости канала. В конце каждого кадра для каждого слота следующего кадра производят назначение его использования для передачи с НК 1 или для передачи с конкретного борта (ПО 3) по его предварительному запросу слота доступа, или для передачи с любого борта ПО 3 в режиме случайного доступа;
- осуществляют обмен пакетными данными на каждом активном ДКМВ канале, например, в режиме HFDL с множественным доступом L подвижных объектов 3 при интенсивности потока 11 сообщений с борта и 6 сообщений с земли в час. При меньшей интенсивности потока сообщений возможно обслуживание большего количества ПО 3 на одном частотном канале;
- для обеспечения MB связи на каждом НК 1 на каждой разрешенной MB частоте производят излучение сигналов маркеров (сквиттеров), которые являются сигналами связи/управления/синхронизации, например, с периодом 2 минуты. Сигналы маркеров разносят во времени, чтобы на ПО 3 можно было оценить качество сигналов разных НК 1 и выбрать НК 1 для связи;
- на каждом ПО 3 по результатам оценки качества принятых сигналов маркеров разных НК 1 для каждого диапазона волн (ДКМВ и MB) выбирают лучшую частоту связи и регистрируют ПО 3 на выбранных частотах MB и ДКМВ каналов;
- в MB диапазоне осуществляют обмен пакетными данными на активном MB канале, например, VDL-2 в режиме множественного доступа к каналу с прослушиванием несущей (CSMA) или на активном канале, например, VDL-4 в режиме множественного доступа к каналу с временным разделением и с самоорганизацией (STDMA);
- в ДКМВ диапазоне на каждом подвижном объекте инициируют процедуру поиска частоты при включении оборудования или после разъединения линии, если ПО 3 не может больше обнаружить маркеры от наземного комплекса 1 на текущей частоте. После автовыбора частоты и регистрации на новом канале производят обмен пакетными данными в режиме TDMA с НК 1, на котором ПО 3 зарегистрирован, до тех пор, пока качество ДКМВ радиоканала превышает допустимый уровень. При ухудшении качества ДКМВ радиоканала ниже допустимого уровня выбирают новый ДКМВ радиоканал и соответствующий ему НК 1, независимо от местоположения НК 1, и регистрируют ПО 3 на новом ДКМВ радиоканале;
- В MB диапазоне на каждом подвижном объекте инициируют процедуру поиска частоты при включении оборудования или после разъединения линии, если ПО 3 не может больше обнаружить VDL пакеты от наземного комплекса 1 на текущей частоте, или, если подуровень управления протоколом доступа к каналу (MAC) индицирует, что текущая частота перегружена. При этом настраивают ШД РМ на альтернативную частоту, используя данные из списка частотной поддержки, и если качество сигналов маркеров на новой частоте удовлетворительно, регистрируют ПО 3 на новой частоте;
- ПО 3 и НК 1 реализуют следующие процедуры управления связностью линии передачи данных MB диапазона:
- идентификацию НК 1;
- начальную установку линии;
- модификацию параметров линии;
- «хэндофф», инициируемый ПО 3;
- «хэндофф», инициируемый НК 1 по запросу ПО 3;
- «хэндофф», инициируемый НК 1;
- «хэндофф», инициируемый ПО 3 по запросу НК 1;
- широковещательный «хэндофф» по запросу НК 1;
- автонастройку;
- при передаче пакета сообщения в ДКМВ диапазоне от конечных бортовых систем ПО 3 к наземным потребителям пакетное сообщение, содержащее адрес получателя и адрес отправителя (адрес борта ПО 3), формируют в бортовых конечных системах ПО 3 (5, 18) и передают через модуль 12 интерфейса в бортовой модуль 13 маршрутизатора, где его упаковывают в виде пакета ISO 8208 или ACARS и затем передают в модуль 14 канального уровня, где его преобразуют в пакет канального уровня сети передачи данных HFDL, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC). Полученные сообщения передаются в модуль 15 физического уровня, где осуществляют операции:
- сверточное кодирование данных для прямой коррекции ошибок,
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех,
- отображение последовательности из трех или двух или одного бита (в зависимости от скорости передачи данных и вида модуляции, например, 2-ФМн, 4-ФМн или 8-ФМн, соответственно) в значения фазы сигнала поднесущей, например, 1440 Гц,
- скремблирование данных для выравнивания спектра передаваемого сигнала,
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора, и информацию о скорости передачи данных и глубине перемежителя,
- формирование коротких обучающих последовательностей, которые вставляют в поток передаваемых данных пользователя, для реализации адаптивных методов приема сообщения,
- формирование заданной формы огибающей каждого символа для обеспечения заданной спектральной маски излучаемого сигнала;
- формирование ДКМВ сигнала, например, с верхней боковой полосой с подавленной несущей с классом излучения 2K80J2DEN.
Сформированный для передачи однотоновый ДКМВ сигнал многопозиционной фазовой манипуляции, например, (M-PSK, М=2, 4 или 8) с выхода модуля 15 физического уровня подают на вход широкодиапазонного радиочастотного модуля 16, где его усиливают до требуемого уровня мощности, подают на ШД АФУ 17 и по ДКМВ радиоканалу 31 передают на наземный комплекс 1, на котором зарегистрирован ПО 3.
На НК 1 ДКМВ сигнал от ДКМВ антенны 21 подают на наземную радиостанцию 22 ДКМВ диапазона, работающую в симплексном режиме в соответствии с указанным протоколом TDMA. С выхода радиостанции 22 сообщение подают на вход аппаратуры 23 передачи данных, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок сообщение упаковывают в пакет, например, ISO 8208 или ACARS и выдают на вход вычислителя АРМ 24, где его упаковывают в пакет, предназначенный для передачи, например, по протоколу Х.25 по наземной сети передачи данных потребителям информации.
При передаче пакета, например, по протоколу Х.25 по наземной сети передачи данных в обратном направлении (от потребителей информации) через НК 1 к ПО 3 вначале его обрабатывают в вычислителе АРМ 24 наземного комплекса 1, где из него формируют пакет ISO 8208 или ACARS, необходимый для передачи в линии передачи данных. С выхода вычислителя АРМ 24 сообщение передают в аппаратуру передачи данных 23, где его упаковывают в пакет канального уровня, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и осуществляют:
- сверточное кодирование данных для прямой коррекции ошибок,
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех,
- отображение последовательности из трех или двух или одного бита (в зависимости от скорости передачи данных и вида модуляции 2-ФМн, 4-ФМн или 8-ФМн, соответственно) в значения фазы сигнала поднесущей 1440 Гц,
- скремблирование данных для выравнивания спектра передаваемого сигнала,
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора, и информацию о скорости передачи данных и глубине перемежителя,
- формирование коротких обучающих последовательностей, которые вставляют в поток передаваемых данных пользователя, для реализации адаптивных методов приема сообщения,
- формирование заданной формы огибающей каждого символа типа приподнятого косинуса для обеспечения заданной спектральной маски излучаемого сигнала.
Сформированный в АПД 23 однотоновый сигнал многопозиционной фазовой манипуляции (M-PSK, М=2, 4 или 8) в полосе звукового канала с одной боковой полосой шириной 3 кГц подают на вход ДКМВ радиостанции 22, где его используют для формирования ДКМВ радиосигнала с верхней боковой полосой с подавленной несущей с классом излучения 2K80J2DEN, усиливают до требуемого уровня мощности, затем через ДКМВ антенну 21 передают по ДКМВ радиоканалу 31 на ПО 3. На ПО 3 ДКМВ радиосигнал через ШД АФУ 17 поступает на ШД РМ 16. Затем сообщение подают на вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, и выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок и в случае отсутствия ошибок упаковывают в пакет, например, ISO 8208 (или ACARS) и выдают на вход ММ 13 для преобразования в пакет, предназначенный для передачи через МИ 12 к бортовым пользователям (блокам 5, 8, 9 или 18).
В процессе обмена пакетными данными в MB диапазоне, например, в режиме VDL-2 при передаче пакета от ПО 3 к наземным пользователям на каждом ПО 3 пакетное сообщение формируют в бортовой конечной системе (18, 5). Сообщение, содержащее адрес получателя и адрес отправителя (адрес борта ПО 3), передают от бортового вычислителя 5 через модуль 12 интерфейса в модуль 13 маршрутизатора, где его упаковывают в пакет, например, ISO 8208 или ACARS сетевого (пакетного) уровня. Затем сообщение передают в модуль 14 канального уровня, где его упаковывают в пакет канального уровня, например, VDL-2, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и передают в модуль 15 физического уровня, где осуществляют:
- кодирование данных кодом Рида-Соломона для прямой коррекции ошибок;
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех;
- отображение последовательности трех бит данных в значение фазы символа сигнала, относительное кодирование фазы соседних символов для реализации, например, относительной 8-ми позиционной фазовой манипуляции (D8PSK);
- скремблирование данных для выравнивания спектра передаваемого сигнала;
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора;
- формирование заданной формы огибающей каждого символа типа приподнятого косинуса с α=0,6 для обеспечения заданной спектральной маски излучаемого сигнала;
- формирование MB сигнала с классом излучения, например, 14K0G1DE - с полосой, занимаемой сигналом 14 кГц, фазовой модуляцией (G) несущей одного цифрового канала без поднесущей, передачей данных (D) и многоусловным кодированием (Е).
Сформированный для передачи, например, однотоновый сигнал 8-ми позиционной относительной фазовой манипуляции (D8PSK) с выхода модуля 15 подают на вход широкодиапазонного радиочастотного модуля 16, где его усиливают до требуемого уровня мощности и через широкодиапазонное АФУ 17 и MB радиоканал 30 передают на наземный комплекс 1, на котором зарегистрирован ПО 3.
На каждом НК 1 MB радиосигнал от MB антенны 19 подают на наземную радиостанцию 20 MB диапазона, затем сообщение подают на вход аппаратуры 23 передачи данных, где демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок из него формируют пакет, например, ISO 8208 или ACARS и выдают на вход вычислителя 24 АРМ, где его упаковывают в пакет, предназначенный для передачи по протоколу Х.25 по наземной сети передачи данных потребителям.
При передаче пакета в обратном направлении (от потребителей к ПО 3) сообщение по входу/выходу 2 НК 1 передают в вычислитель 24 АРМ НК 1, где формируют пакет, например, в соответствии с ISO 8208 или ACARS, который передают в аппаратуру передачи данных 23, где его упаковывают в пакет канального уровня, например, VDL-2, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC), и осуществляют:
- кодирование данных Рида-Соломона для прямой коррекции ошибок,
- перемежение данных для борьбы с пакетированием ошибок из-за замираний и импульсных помех,
- отображение последовательности из трех бит в значения фазы сигнала несущей, относительное кодирование фазы соседних символов,
- скремблирование данных для выравнивания спектра передаваемого сигнала,
- формирование ключевой синхронизирующей последовательности и преамбулы, содержащей известную последовательность для обучения адаптивного демодулятора,
- формирование заданной формы огибающей каждого символа типа приподнятого косинуса с а=0,6 для обеспечения заданной спектральной маски излучаемого сигнала,
- формирование MB сигнала с классом излучения, например, 14K0G1DE (с полосой, занимаемой сигналом 14 кГц, фазовой модуляцией (G) несущей, одного цифрового канала без поднесущей, передачей данных (D) и многоусловным кодированием (Е).
Сформированный для передачи, например, сигнал 8-ми позиционной относительной фазовой манипуляции (D8PSK) с выхода АПД 23 подают на вход радиостанции 20, где его усиливают до требуемого уровня мощности и через антенну 19 передают по радиоканалу 30 MB диапазона на ПО 3.
На ПО 3 MB сигнал от ШД АФУ 17 подают на ШД РМ 16, с выхода которого сообщение подают на вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, и затем выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок. В случае отсутствия ошибок сообщение упаковывают в пакет, например, в соответствии с ISO 8208 (или ACARS) и выдают на вход ММ 13, где его формируют для передачи через МИ 12 бортовым пользователям (блокам 5, 8, 9 или 18).
В системе разрабатывают системную таблицу связи, содержащую координаты НК 1, их адреса, приложения УВД, режимы передачи данных, которые они поддерживают в MB и ДКМВ диапазонах, разрешенные частоты связи для разных режимов обмена данными MB и ДКМВ диапазонов, временное расписание излучения сигналов маркеров на каждой частоте ДКМВ и доводят до каждого НК 1 и ПО 3 (во время предполетной подготовки) по наземной сети передачи данных.
Для каждого НК 1 на интервал времени 1-2 часа активизируют одну из разрешенных частот ДКМВ диапазона. Частоты связи MB диапазона, заданные в списке частотной поддержки, являются активными. На каждом НК 1 на активной частоте связи излучают сигналы маркеров в MB диапазоне, например, с интервалом 2 минуты, в диапазоне ДКМВ с интервалом, например, 32 с согласно протоколу ДКМВ линии данных, например, системы HFDL. В сигналы маркеров ДКМВ вводят информацию о версии системной таблицы (версии базы данных), об активных частотах двух соседних НК 1, назначения слотов для нового кадра, квитанции на все сообщения от ПО 3, принятые в предыдущем кадре, флаг занятости канала. Кадр доступа к ДКМВ каналу разделяют на несколько слотов. Первый слот отводят под излучение маркера с НК 1. Несколько (3-5) слотов назначают в каждом кадре для случайного доступа всех ПО 3, остальные слоты для резервированного доступа конкретных ПО 3 по их запросу.
Бортовой комплекс связи ПО 3 начинает анализировать сигналы маркеров MB и ДКМВ диапазонов, находясь на стоянке в зоне аэропорта после включения питания и проведения автоматического встроенного контроля технической исправности. Независимо от функционирования канала связи MB диапазона ПО 3 постоянно поддерживает канал связи ДКМВ диапазона, например, в режиме HFDL с тем НК 1, качество канала с которым является наилучшим или приемлемым.
Во время полета на каждом ПО 3 обеспечивают автоматический выбор рабочей частоты из списка разрешенных частот, регистрацию на НК 1 на выбранном канале, случайный и резервированный доступ к каналу связи в режиме множественного доступа с временным разделением, обмен данными с территориально разнесенными наземными комплексами 1, объединенными с помощью наземной сети передачи данных в единую систему.
В системе радиосвязи ведут обмен навигационными и другими данными по радиолинии связи MB диапазона меду наземным комплексом 1 и подвижными объектами 3, находящимися в пределах радиогоризонта НК 1. Принимаемые наземной радиостанцией 22 из канала «Воздух-Земля» («Воздух») сообщения через аппаратуру 23 передачи данных подают в наземный вычислитель 24 АРМ, который может быть выполнен на базе серийной ПЭВМ. В нем в соответствии с принятым в системе протоколом обмена проводят идентификацию (сравнение) принятого в сообщении адреса ПО 3 с адресами подвижных объектов, хранящимися в памяти вычислителя 24 АРМ. При совпадении адреса подвижного объекта 3 с хранящимся в списке адресом информацию о местоположении, параметрах движения ПО 3 и состоянии его датчиков запоминают в вычислителе 24 АРМ. В наземном вычислителе 24 АРМ решают задачи обеспечения постоянной устойчивой радиосвязи со всеми N ПО 3, и на основе информации о точном местонахождении всех ПО 3 и параметрах их движения осуществляют операции запоминания сообщений в наземном вычислителе 24 АРМ и вывод необходимых данных на экран монитора 27 АРМ НК 1 в виде, удобном для восприятия оператором (диспетчером).
При выходе за пределы радиогоризонта НК 1, хотя бы одного из ПО 3 или приближении к границе зоны устойчивой радиосвязи, наземный комплекс 1 определяет программно один из ПО 3, которого назначает первым ретранслятором сообщений. При постоянном изменении дальности между ПО 3 и НК 1 в качестве ретранслятора в течение определенного времени может быть назначен любой из N ПО 3, местоположение которого известно и оптимально по отношению к НК 1 и всем остальным ПО 3. По анализу местоположения и параметров движения остальных ПО 3 определяют оптимальные пути доставки сообщений к удаленному от НК 1 за радиогоризонт подвижному объекту 3 - получателю сообщения. Сообщение от НК 1 через последовательную цепочку, состоящую, при необходимости, из нескольких (от 1 до (N-1)) ПО 3, может быть доставлено к требуемому ПО 3 - получателю. Для этого на НК 1 в формирователе 26 типа ретранслируемых сообщений в заранее определенные разряды передаваемой кодограммы закладывают адрес ПО 3, назначенного первым ретранслятором, при необходимости адреса других подвижных объектов 3 - ретрансляторов, и адрес ПО 3 - получателя, обеспечивающих заданный трафик сообщения. Принятые и обработанные на ПО 3 в устройствах 17, 16, 15, 14, 13, 12 сообщения, обрабатывают в блоке 9 анализа типа сообщений. Если сообщение предназначено для данного ПО 3, то после анализа решается вопрос о направлении данных по двунаправленной шине 18 на систему управления ПО 3, или о передаче сообщения в режиме ретрансляции к соседнему ПО 3. Для исключения коллизий минимизируют число разрядов в передаваемом сообщении и осуществляют ретрансляцию данных последовательно во времени.
Для каждого ПО 3 траектории движения соседних ПО 3, при необходимости, отображают на экране собственного бортового блока 8 регистрации данных, а на экране монитора 27 АРМ - траектории всех ПО 3 в районе действия НК 1 с помощью характеризующих предыдущее местоположение ПО 3 отметок, формируемых вычислителями 5 и 24. По мере движения ПО 3 устаревшие отметки стираются. Во время предполетной подготовки каждого подвижного объекта 3 с помощью интерфейса 18 осуществляют загрузку в память бортового вычислителя 5 необходимых радиоданных в виде системной таблицы, содержащей списки адресов, координат наземных комплексов и назначенных им частот связи. В НК 1 системные таблицы загружаются с помощью входа/выхода 2 НК 1 для наземной сети передачи данных.
При передаче с НК 1 приоритетных сообщений для ПО 3 в соответствии с принятыми в системе радиосвязи с подвижными объектами категориями срочности в формирователе 26 типа ретранслируемых сообщений в заголовке сообщения формируют код запрета передачи других сообщений на время, отводимое для трансляции данных с НК 1 на выбранный ПО 3, с учетом времени реакции ПО 3 на принятое сообщение и времени задержки в трактах обработки дискретных сигналов. Принимаемую на ПО 3, информацию отображают на экране блока 8 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов. Остальные менее приоритетные сообщения в соответствии с протоколом обмена ставят в очередь соответствующей категории срочности. В вычислителях 5 и 24 определяют время «старения» информации, и, если сообщение в течение промежутка времени, равного времени «старения», не было передано в канал связи, то его «стирают», и посылают запрос на передачу нового сообщения.
При работе НК 1 в режиме прямой радиовидимости (ближней связи), когда не требуется ретрансляция сигналов, осуществляют, например, адресный режим автоматического зависимого наблюдения (ASD-A), т.е. адресный опрос ПО 3 путем формирования сообщения для передачи в канал радиосвязи в соответствии, например, с протоколом обмена VDL-2 или VDL-ACARS в MB диапазоне. Набираемое диспетчером НК 1 на пульте 28 управления АРМ сообщение отображают на мониторе 27 АРМ и после передачи сообщения через вычислитель 24, аппаратуру 23 передачи данных, радиостанцию 20, антенну 19, через радиоканал 30, бортовые широкодиапазонные антенно-фидерные устройства 17 ПО 3, бортовые широкодиапазонные радиочастотные модули 16 ПО 3, модуль 15 физического уровня, модуль 14 канального уровня вычислительного модуля 11 связи, модуль 13 маршрутизации вычислительного модуля 11 связи, модуль 12 интерфейсов вычислительного модуля 11 связи его подают в бортовой вычислитель 5, где производят идентификацию принятого в сообщении адреса с адресом ПО 3. Далее через модуль 12 интерфейсов сообщение передают в блок 9 анализа типа ретранслируемого сообщения для дешифрации полученного заголовка (служебной части) сообщения и определения режима работы аппаратуры ПО 3. Информационную часть сообщения записывают в память бортового вычислителя 5 и при необходимости выводят на экран блока 8 регистрации данных, который может быть выполнен в виде монитора или другого устройства отображения.
С помощью определенного формата заголовка сообщения с выхода бортового формирователя 10 типа ретранслируемых сообщений задают режим свободного доступа к каналу связи для всех подвижных объектов 3 или режим фиксированного (резервированного) доступа с назначением конкретного временного интервала для организации обмена данными с НК 1.
НК 1, например, для режимов VDL-2 и HFDL является базовой (ведущей) станцией сети и гарантирует для каждого зарегистрированного на нем ПО 3 требуемые системные характеристики связи, а именно: вероятность своевременной доставки сообщения с заданной достоверностью и интенсивностью потока сообщений, т.е. вероятность того, что средняя задержка передачи сообщения не превысит требуемого порога при достоверности связи не хуже 10-6 и заданной интенсивности потока сообщений с борта ПО 3. Средняя задержка передачи сообщений, например, в режимах VDL-2 и HFDL в значительной мере обусловлена коллизиями случайного доступа и растет с увеличением вероятности коллизий. Вероятность коллизий увеличивается с ростом количества ПО 3, использующих один канал связи в режиме случайного множественного доступа, и с ростом интенсивности потока сообщений от каждого ПО 3. Зная точные количественные зависимости указанных параметров для разных режимов обмена данными, в НК 1 прогнозируют системные характеристики в зависимости от количества зарегистрированных на одном частотном канале ПО 3. Регистрацию новых ПО 3 прекращают (выставляют флаг «занятости» канала связи в маркере), если прогнозируемые системные характеристики деградируют ниже заданного уровня, уменьшая тем самым, вероятность коллизий случайного доступа и, следовательно, задержку в передаче сообщения. Таким образом, в результате анализа состояния и загрузки каналов радиосвязи в каждом НК 1 прогнозируют вероятность коллизий случайного доступа, и, когда эта величина превышает предельно допустимое значение, доступ к каналам связи НК 1 новых ПО 3 прекращают по команде НК 1.
Для того, чтобы минимизировать вероятность коллизий случайного доступа, не создавать помех текущей передаче сообщения, например, в режиме VDL-2 реализуют протокол множественного доступа к каналу с прослушиванием несущей (CSMA). Для этого в АПД 23, вычислителе 24 НК 1 и модулях 15 физического уровня и 14 канального уровня ПО 3 перед передачей каждого сообщения осуществляют прослушивание канала (контроль занятости несущей) на предмет обнаружения преамбулы, заголовка или полезной части сообщений. Подготовленное сообщение с ПО 3 передают только в том случае, когда радиоканал свободен. Для того, чтобы разнести во времени моменты выхода на связь разных подвижных объектов 3 и НК 1, когда после занятости канала все корреспонденты обнаружили, что радиоканал свободен, в вычислителе 24 НК 1 и в модуле 14 канального уровня ПО 3 формируют псевдослучайные задержки передачи сообщений от подвижных объектов 3 (для каждого ПО 3 своя) и от НК 1. На каждом из ПО 3 время окончания сигнала несущей частоты в радиоканале и импульсы синхронизации используют для инициализации расчета в модуле 14 канального уровня интервала времени собственной передачи и внутри этого интервала с помощью модуля 15 физического уровня, модуля 16 и АФУ 17 ПО 3 осуществляют передачу собственного пакета данных.
При работе системы радиосвязи, например, в режиме HFDL часть слотов кадра TDMA также отводят для случайного доступа. Если передают пакет с ПО 3 в слоте случайного доступа и в маркере следующего кадра не обнаруживают положительной квитанции на эту передачу, то принимают решение о том, что произошла коллизия случайного доступа и инициируют на ПО 3 алгоритм выхода из коллизии, при котором вводят псевдослучайную задержку, выраженную в слотах, повторной передачи пакета с борта. Это приводит к уменьшению вероятности повторной коллизии.
При работе, например, в режиме широковещательного автоматического зависимого наблюдения (ADS-B) с помощью линии передачи данных VDL-4 МБ диапазона используют протокол множественного доступа к каналу связи с временным разделением и с самоорганизацией (STDMA). Этот протокол представляет комбинацию протоколов CSMA и TDMA, в которой время использования канала жестко делят на кадры (фреймы) и слоты, но нет ведущей станции, которая управляет диспетчеризацией слотов. Выбор слотов доступа производят каждым корреспондентом самостоятельно путем предварительного прослушивания эфира в течение 1 минуты (длительности суперфрейма) и выявления свободных слотов, которые можно занять, не конфликтуя с другими пользователями канала. При длительности одного слота 13,333 милисекунды, в котором можно передать один пакет сообщения длиной 32 байта при скорости передачи данных 19200 бит/с режима VDL-4, один фрейм (кадр) длительностью 1 секунда содержит 75 слотов, а суперфрейм длительностью 1 минута содержит 4500 слотов. Реальная длина пакета не должна превышать 30 байт, чтобы оставить 2 байта (1 мс) на задержку выхода передатчика на полную мощность и рассинхронизацию в линии. Точность привязки временной шкалы VDL-4 при использовании приемников GNSS составляет 100 мкс. Распределение слотов периодично от одного суперфрейма к другому. Если ПО 3 выбрал последовательность слотов в суперфрейме, то в следующем суперфрейме он либо будет вещать в слотах с теми же порядковыми номерами, либо предупредит об их изменении заранее. НК 1 имеют право резервировать несколько слотов (по умолчанию 8) в начале каждой секунды для важных периодических передач на ПО 3, например, сигналов дифференциальных поправок и других. Коллизия случайного доступа двух ПО 3 может произойти только при одновременном их включении (с точностью до минуты). Для решения этой проблемы алгоритм выбора слотов делается псевдослучайным, т.е. два корреспондента при одновременном включении выбирают разные наборы слотов для вещания. Вероятность совпадения всех выбранных слотов близка к нулю. При навигации на эшелоне на высоте полета 10000 км, радиусе радиовидимости R=400 км, пропускной способности канала, например, VDL-4 S=75 слотов в секунду, времени обновления информации о позиции Т=10 секунд количество подвижных объектов 3, которые могут быть обслужены без коллизий случайного доступа в зоне радиовидимости НК 1, равно N=750 (N=ST). При этом для каждого ПО 3 найдется свой свободный слот. Эта величина лежит далеко за пределами реального тра-фика воздушного движения даже самых загруженных аэропортов Европы. При интервале обновления информации о позиции ПО 3 Т=1 секунда на одной частоте в режиме VDL-4 можно обслужить N=75 ПО 3, когда слотов хватает на всех. На двух частотах можно гарантированно обслужить максимальное число ПО 3, равное N=150 в зоне радиусом R=400 км. Если же в зоне прямой видимости окажется больше, чем 150 ПО 3, например 300 ПО 3, тогда радиус r зоны гарантированного обслуживания в режиме VDL-4 при такой насыщенности воздушного пространства уменьшится до 280 км, т.е. будет определяться не радиусом прямой видимости, а количеством ПО 3, которое НК 1 гарантирует надежно обслужить  . Когда N мало и слотов достаточно для всех ПО, дальность действия системы А3Н-В равна просто дальности MB радиосвязи, а когда N так велико, что слотов на всех не хватает, то дальность действия системы ограничивается радиусом круга с центром в НК 1, который охватывает столько ПО 3, что каждому из них достается хотя бы один индивидуальный слот доступа каждые Т секунд.
. Когда N мало и слотов достаточно для всех ПО, дальность действия системы А3Н-В равна просто дальности MB радиосвязи, а когда N так велико, что слотов на всех не хватает, то дальность действия системы ограничивается радиусом круга с центром в НК 1, который охватывает столько ПО 3, что каждому из них достается хотя бы один индивидуальный слот доступа каждые Т секунд.
Чем больше плотность движения, тем меньше радиус гарантированного обслуживания одного НК 1. Для стран Европы, где Nмакс=300 в зоне прямой видимости НК 1 представляется реальным в ближайшем будущем, радиус зоны гарантированного обслуживания одного НК 1, равный 280 км, является вполне допустимым. Таким образом, по своей пропускной способности режим передачи данных VDL-4 MB диапазона далеко превосходит существующие потребности УВД настоящего времени и может быть эффективно использован в будущих системах. При работе, например, в режиме автоматического зависимого наблюдения широковещательного (А3Н-В) или (ADS-B) по всему миру выделяются два глобальных канала (GSC1 и GSC2) для полета на эшелоне. В этом случае оборудование ПО 3 ведет независимую трансляцию на этих каналах с одним и тем же периодом и сдвигом посылок в одном канале относительно другого примерно на половину периода, с тем, чтобы обеспечить равномерность получения информации по двум каналам совместно. В сильно загруженных аэропортах выделяется еще два и более локальных каналов (LSC1, LSC2). Таким образом, обеспечивается наращивание пропускной способности системы связи, ее масштабирование. Поэтому каждый ПО 3 должен иметь не менее четырех независимых MB приемопередатчиков для VDL-4 [5]. Такая возможность на борту появляется с внедрением широкодиапазонных АФУ 17, ШД РМ 16, МФУ 15, МКУ 14.
Сообщения о местоположении ПО 3 и параметрах его движения с выходов приемников 7 и 25 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS, записывают в память вычислителей 5 и 24 с привязкой к глобальному времени [5, 6, 7]. Точная синхронизация слотов, используемых для обмена данными между абонентами системы, и их запланированное использование для передачи известно каждому пользователю по отношению к окружающим пользователям с известными координатами. Управление протоколом доступа к каналу VDL-4 на каждом подвижном объекте 3 осуществляют в модуле 14 канального уровня, а на НК 1 - в аппаратуре передачи данных 23 и вычислителе АРМ 24.
Хотя, например, в режиме VDL-4 НК 1 является равноправным пользователем канала наряду со всеми остальными ПО 3 и базовая версия протокола доступа к каналу не требует диспетчеризации доступа со стороны НК, очевидна целесообразность осуществления такой диспетчеризации наземным комплексом для сокращения затрат времени на исследование занятости канала каждым ПО 3 при выборе слотов доступа. Время вхождения в связь каждого ПО 3 можно сократить, если предусмотреть передачу специальных сообщений от НК 1, содержащих информацию о свободных слотах доступа в зоне его обслуживания. Поскольку НК 1 постоянно наблюдает за каналом, он имеет полную информацию о динамике протокола доступа к каналу. Назначение слотов для ПО 3 наземным комплексом 1 позволит полностью избежать коллизий случайного доступа, а также уменьшить временные и вычислительные затраты ПО 3 на выбор слотов доступа к каналу. Если НК 1 зарезервирует несколько слотов (по умолчанию 8) в начале каждой секунды для передач на ПО 3 информации о свободных слотах, то при интервале слежения за ПО 3 Т=1 секунда НК 1 может обслуживать без взаимных помех до 67 ПО 3, при интервале слежения Т=10 секунд количество гарантировано обслуживаемых одним НК 1 ПО 3 возрастает до 670.
В вычислителях 5 и 24 данные о местоположении ПО 3 и параметрах его движения используют для расчета навигационных характеристик и параметров движения каждого ПО 3. В зависимости от выбранного интервала времени выдачи на НК 1 сообщений о местоположении ПО 3 в вычислителе 5 в заданное время формируют соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО 3. Это время используют в вычислителе 24 НК 1 для известной операции построения экстраполяционных отметок от ПО 3 [5]. В аппаратуре передачи данных 23 НК 1 и модулях 14 и 15 ПО 3 осуществляют известные операции: модуляции и демодуляции, кодирования и декодирования.
Процесс контроля прохождения информации по обслуживаемым вторыми бортовыми вычислителями 32 узлам 5,12-16 начинается со сбора информации об их состоянии. Реализация комплекса задач сбора информации о состоянии этих узлов позволит создать информационно справочную систему и на ее базе формировать справочные и отчетные документы по их работоспособности и состоянию обслуживаемых радиоканалов связи.
Комплекс задач сбора информации о состоянии системы радиосвязи, решаемый во вторых бортовых вычислителях 32 включает следующие подзадачи:
- сбор информации о состоянии связного ресурса;
- сбор информации о состоянии радиоканалов;
- сбор информации о состоянии информационного обмена НК-ПО;
- сбор информации о местоположении ПО.
Сбор информации может осуществляться в следующих режимах:
- по графику, предусматривающему периодическую передачу информации о состоянии узлов. Период сбора может задаваться по каждой задаче и для каждого режима функционирования системы;
- по изменениям, включающим передачу информации о состоянии системы в случае критических изменений состояния по результатам комплексной оценки, влияющим на возможность выполнения системой поставленных перед ней задач;
- по запросу, который формируется во вторых бортовых вычислителях 32 при необходимости получения данных о состоянии системы для решения текущей задачи.
Как результат сбора информации о состоянии системы должна формироваться база данных ее состояния, в том числе и обслуживаемых радиоканалов связи.
Для автоматизации процесса принятия решения по состоянию обслуживаемых радиоканалов связи должна быть выполнена комплексная оценка состояния каждого радиоканала на предмет готовности его к выполнению поставленной задачи. В основу комплексной оценки должен быть положен критерий, сформулированный для системы в целом и отдельных ее составляющих. Критерий оценки состояния связного ресурса системы должен формулироваться для каждого радиоканала и для каждого узла системы.
Текущее состояние узла может принимать следующие значения:
- норма, если по результатам контроля изделие полностью исправно и обеспечивает работу во всех режимах при заданных параметрах;
- частично неисправно, если по результатам контроля выявлены неисправности отдельных узлов, приводящих к ограничениям в работе системы в отдельных режимах;
- неисправно, если по результатам контроля выявлена неисправность всей системы или ее составляющих узлов, приводящая к невозможности выполнения системой своих функций.
По результатам комплексной оценки состояния системы и ее элементов во вторых бортовых вычислителях 32 осуществляется выработка управляющих воздействий по приведению оборудования ПО, например, с помощью реконфигурации системы в состояние, обеспечивающее выполнение поставленной перед ней задачи.
На основании оценки текущего состояния связного ресурса системы в режимах предварительной, оперативной подготовки и оперативного управления выполняется планирование связи.
Процедуры контроля отправляемых и принимаемых данных осуществляется с помощью блока 8 регистрации данных. Распределение информации обеспечивается за счет подключения вторых бортовых вычислителей 32 к модулю маршрутизации, например, через стык Ethernet. Вторые бортовые вычислители 32 при работе дублируют друг друга, повышая надежность оборудования APT.
Для функционирования бортового оборудования ПО 3 в системе необходим предварительный ввод исходных данных, определяющих характеристики обслуживаемых радиоканалов, их режимы функционирования, абонентскую адресацию и т.п. Ввод исходных данных, рабочих программ можно осуществлять по шине 18 или через вторые бортовые вычислители 32, которые должны быть многофункциональными с достаточным вычислительным ресурсом, чтобы выполнять заданные им функции.
За счет взаимного обмена данными между НК 1 и ПО 3 и использования связного ресурса в каждом бортовом вычислителе 32 решаются задачи обеспечения постоянной устойчивой радиосвязи со всеми ПО 3, находящимися в пределах радиозон обслуживания заданных НК 1, и на основе информации о точном местонахождении всех ПО 3 и параметрах их движения осуществляются операции запоминания этих сообщений в вычислителе АРМ и вывод необходимых данных на экран его монитора в виде, удобном для восприятия оператором (диспетчером).
Проверка работоспособности бортового оборудования ПО 3 и локализация возможных отказов и неисправностей с точностью до конструктивно сменной единицы осуществляется с помощью автоматизированной системы встроенного контроля, реализованной программно во вторых бортовых вычислителях 32 и элементов контроля, установленных в каждом из электронных узлов аппаратуры ПО. Система встроенного контроля бортового оборудования ПО 3 имеет два режима:
режим полного (функционального) контроля и режим текущего контроля. Режим полного контроля инициализируется по специальным командам, при этом прекращается функционирование во всех информационных радиоканалах. По окончании полного контроля работа в информационных сетях возобновляется с точки инициализации соответствующих сетевых и канальных протоколов. Текущий контроль выполняется циклически непрерывно и параллельно с рабочими режимами, не прерывая их.
Вторые бортовые вычислители 32, дублируя друг друга, осуществляют:
- сбор и обработку информации о состоянии составных частей бортового оборудования ПО 3 и радиоканалов связи;
- обнаружение неисправностей, аварийную сигнализацию о возникновении неисправностей приемо-передающей аппаратуры;
- отображение на экране блока 8 регистрации данных (одного из двух) состояния технических средств, состояния радиоканалов воздушной (морской) связи с использованием цветовой подсветки;
- регистрацию на жестких дисках передаваемых и принимаемых данных;
- подготовку сведений о состоянии технических средств и радиоканалов воздушной (морской) связи;
- передачу на НК 1 сведений при появлении отказа оборудования или с заданным периодом повторения или по команде с НК 1, а также запись этих данных в электронный журнал с привязкой к единому времени;
- просмотр информации на экране блока 8 регистрации данных (одного из двух) о состоянии и эксплуатационных характеристиках составных частей бортового оборудования.
Благодаря наземной сети передачи данных с входами/выходами 4, которая объединяет между собой все М НК 1, информация, например, автоматического зависимого наблюдения и других приложений CNS/ATM от удаленного на большие расстояния (до 4-6 тысяч км и более) ПО 3, оборудованного устройствами 14, 15, 16, 17 с функцией управления ДКМВ радиолинией, доводится до всех НК 1 системы радиосвязи, хотя удаленный ПО 3 держит связь только с одним НК 1, качество сигналов маркеров которого является наилучшим для ПО 3 на данный момент времени.
Для этого в бортовом и наземном вычислителях 5 и 24 хранят предварительно заложенные системные таблицы со списками наземных комплексов 1 с их координатами, адресами и наборами назначенных им частот. На каждом НК 1 периодически излучают сигналы маркеров (управления/синхронизации/связи) на активной частоте. В модулях 14 и 15 ПО 3 и бортовом вычислителе 5 (через модули 13, 12 вычислительного модуля 11 связи) ПО 3 автоматически анализируют принимаемые сигналы маркеров от всех наземных комплексов 1 на всех частотах и выбирают лучшую частоту (например, по критерию максимума измеряемого демодулятором при приеме всего пакета эффективного отношения «сигнал-помеха» с учетом набора предоставляемых НК 1 услуг передачи данных, например, только ACARS или ACARS+ATN, ISO 8208, RLS, а также с учетом исправности интерфейса НК 1 с наземной сетью передачи данных. По измеренному на выбранной частоте в модуле 15 эффективному отношению «сигнал-помеха» в модуле 14 вычислительного модуля 11 связи ПО 3 выбирают максимально допустимую скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения «сигнал/помеха» осуществляется всеми НК 1 и ПО 3 системы каждый раз при приеме любого пакета сообщения. Величина выбранной максимальной допустимой скорости передачи данных сообщается на противоположную сторону в виде рекомендуемой скорости передачи данных. В наземной аппаратуре 23 передачи данных при работе на радиостанцию 22 ДКМВ диапазона и в бортовых модулях 15,14 ПО 3 могут быть использованы известные алгоритмы высокоскоростных адаптивных модемов, рассчитанных на работу в каналах с многолучевостью, например алгоритм демодуляции с использованием эквалайзера с решающей обратной связью, субоптимальный алгоритм Витерби приема в целом с поэлементным принятием решения в условиях многолучевости, алгоритм максимального правдоподобия с идентификацией текущих параметров канала (импульсной характеристики канала) на основе методов стохастической аппроксимации и др. Все используемые алгоритмы приема должны удовлетворять требования по помехоустойчивости, указанные в ARINC 635. Проверка помехоустойчивости алгоритмов приема должна осуществляться в контролируемых условиях с помощью машинного моделирования с использованием имитатора канала, рекомендуемого, например, в нормативных документах ITU-R (Рек. МСЭ-R F-520-2).
Реализация адаптивных методов приема обеспечивает в ДКМВ каналах энергетический выигрыш порядка 9 дБ по сравнению с традиционными модемами с защитным интервалом для борьбы с многолучевостью. Это эквивалентно повышению надежности связи на 20-30% или увеличению на 3-4 тысячи км дальности связи при более высокой (в 10-20 раз) скорости передачи данных.
Таким образом, каждый из ПО 3 может выходить на связь на нескольких рабочих частотах, известных всем участникам движения. Списки выделенных частот меняются в зависимости от времени года, а рабочая частота для каждого НК 1 из списка выделенных частот активизируется на каждый час или два часа времени суток. При движении ПО 3 выходит на связь, выбирая для связи тот НК 1, условия распространения радиоволн для связи с которым в данный момент времени являются оптимальными. При этом, совсем не обязательно, чтобы выбранный НК 1 был ближайшим. Составленный таким образом канал связи между ПО 3 и наземным потребителем (источником) информации, как правило, будет включать бортовую сеть передачи данных и наземную сеть передачи данных, связанные между собой радиолинией 31 ДКМВ диапазона. Как только качество канала 31 связи деградирует ниже допустимого уровня, на борту с помощью модулей 14 и 15 ПО 3 выбирают новую оптимальную рабочую частоту на основании анализа условий распространения радиоволн и новый, соответствующий ей НК 1. Таким образом, обеспечивают высокую (порядка 99,9) надежность связи при обмене данными с ПО 3, находящимися от НК 1 на расстояниях от нескольких сотен до 4-6 тысяч километров и более.
Синхронизация работы наземной сети передачи данных осуществляется на основе использования всеми участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы с помощью приемников 7 и 25.
Для взаимодействия наземных комплексов 1, оконечных пользователей и ПО 3 используется наземная сеть передачи данных с входами/выходами 4 для НК 1. Она может быть реализована известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [6]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное наземным пользователем определенному ПО 3 на тот наземный комплекс 1, на котором данный ПО 3 «зарегистрирован», и где в данный момент времени обеспечиваются оптимальные условия ДКМВ приема. Система радиосвязи с ПО 3 работает в автоматическом режиме без вмешательства оператора на выбранных частотах из списка частот, назначенного при планировании связи. При передаче данных по ДКМВ линии каждый частотный канал используется по протоколу множественного доступа с временным разделением (TDMA). Время доступа к частотному каналу разбито на кадры, каждый их которых в свою очередь поделен на несколько интервалов (слотов). Используются, короткие пакеты (порядка 67-405 байт пользователя) сообщений, передаваемые в заданном временном слоте в соответствии с назначением каждого слота, производимым НК 1, в конце каждого кадра и передаваемым НК 1 широковещательно в сигнале связи/управления/синхронизации (маркере) в первом слоте каждого кадра. Передача маркера каждого НК 1 на каждой активной частоте имеет свое смещение относительно начала ведущего кадра, указанное в системной таблице. На одном ДКМВ канале системы HFDL НК 1 обеспечивает обслуживание до 26 ПО 3 при типичной для УВД и АОК интенсивности потока сообщений с борта 11 сообщений/час, с земли 6 сообщений/час при средней задержке передачи пакета, не превышающей 60 с. В специальном режиме автоматического периодического вещания с бортов в ДКМВ диапазоне информации о координатах с помощью режима HFDL на одном частотном канале можно обслужить до 12 ПО 3 при интервале слежения Т=32 с, 24 ПО 3 при Т=64 с, 36 ПО 3 при Т=96 с, 48 ПО 3 при Т=128 с и т.д.
Основное преимущество использования на ПО 3 устройств 17, 16, 15, 14, 13, 12, основанных на принципах интегрированной модульной авионики (ИМА), представленных, например в [8, 9, 10] и методе «радио, задаваемого программой», состоит в высшем уровне конфигурируемости и гибкости, предоставляемом архитектурой. Высший уровень конфигурируемости, реализуемый в предлагаемом оборудовании ПО 3 - это полностью гибкие виды модуляции, протоколы уровня линии, сети и пользовательские функции, возможность изменения ширины полосы сигнала и центральной частоты по программе в широких пределах [8]. Благодаря заявленной системе появляется возможность создания (с помощью бортового вычислителя 5 и соответствующих модулей 15, 14 с широкодиапазонным радиочастотным модулем 16) широкодиапазонной программируемой радиостанции нового типа, работающей совместно с широкодиапазонным АФУ 17 как в MB, так и в ДКМВ диапазонах. Модуль 15 физического уровня ПО 3 содержит высокоскоростные с большим динамическим диапазоном АЦП и ЦАП и базируется на высокопроизводительных сигнальных процессорах, которые в цифровом виде реализуют большинство функций физического уровня, например, операции частотного преобразования, фильтрации, синтеза частот, приемо-возбудителя. Он предназначен для формирования и обработки радиосигналов на физическом уровне (кодирования/декодирования, перемежения/деперемежения, скремблирования/дескремблирования данных, модуляции/демодуляции, реализации адаптивных методов передачи и приема сигналов, полосовой фильтрации, преобразования частоты и т.п.). Модуль 14 канального уровня обеспечивает протоколы выбора частот связи, составления линии связи, обмена данными уровня линии и доступа к подсети, обмена с модулем 13 маршрутизации ПО 3, обеспечения отказоустойчивого режима работы и другие процедуры. Модуль 13 маршрутизации обеспечивает распределение сообщений принятых из MB и ДКМВ каналов в виде, например, пакетов ISO 8208 или пакетов ACARS конечным потребителям на борту и в обратном направлении. Модуль 12 интерфейсов обеспечивает все необходимые интерфейсы с бортовым оборудованием, например, по протоколам ARINC 429, ARINC 664, ARINC 646 и другим.
Вторые бортовые вычислители 32 предназначены для обеспечения следующих функций:
- контроля работоспособности всех узлов двух радиоканалов;
- оценки качества цифровой обработки сигналов в соответствующих узлах обоих радиоканалов;
- выбора радиоканала с наиболее достоверной информацией;
- выработки управляющего воздействия на первые бортовые вычислители 5 с целью обеспечения или необеспечения прохождения достоверного сообщения по шине 18 на систему управления ПО 3;
- обмена информацией между собой;
- распределение функций ведущего и ведомого вычислителя;
- реконфигурации бортового оборудования при наличии отказа.
Вторые бортовые вычислители 32 могут быть выполнены, например, на УВМ РАМЭК-014-002 РАМГ.466226.014-002.
ШД АФУ 17 и модули 16, 15, 14 интегрируют функции радиостанций MB и ДКМВ диапазонов, аппаратуры передачи данных (кодека, модема) с программной реализацией режимов работы аппаратуры (видов модуляции, кодирования) с возможностью введения новых режимов работы модулей программным способом через шину 18, бортовой вычислитель 5 и соответствующие последовательно соединенные модули 12 и 13, входящие в вычислительный модуль 11 связи. Широкодиапазонный радиочастотный модуль 16 содержит радиочастотное аналоговое оборудование. Вычислительный модуль связи 11, входящий в состав ПО 3, обеспечивает функциональное взаимодействие с бортовыми устройствами 5, 7, 8, 9, 10 и 15 и датчиками 6 событий.
Модуль 14 канального уровня предназначен для управления выбором частотных каналов, установлением линий связи и регистрацией на НК 1, для упаковки, распаковки сообщений, управления доступом к каналу, дополнительного кодирования/декодирования избыточным циклическим кодом CRC для обнаружения ошибок, не исправленных на физическом уровне, автоматического запроса повторения, криптозащиты на канальном уровне, управления изоляцией неисправностей и восстановлением работоспособности за счет реконфигурации бортовой системы и т.п. Он реализуется, например, на плате процессорной 5066-586-133MHz-1MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 13 маршрутизатора взаимодействует с модулем 14 канального уровня на уровне доступа к подсети, например, по протоколу ISO 8208 (в среде ATN) или протоколу ARINC 619 (в среде ACARS) в соответствии с заданными режимами передачи данных и может быть реализован на универсальном вычислителе типа платы процессорной 5066-586-133MHz-1MB, 2 MB Flash CPU Card фирмы Octagon Systems.
Модуль 12 интерфейса обеспечивает взаимодействие вычислительного модуля 11 связи с бортовой авионикой (устройствами 5, 6, 7, 8, 9, 10, 32) по разным стыкам, например, дискретный сигнал, например, в соответствии с ARINC 429, ARINC 664, ARINC 646, разовая команда и через бортовой вычислитель 5, двунаправленную шину 18 с системой управления подвижным объектом 3. Он может быть выполнен, например, на коммутаторе AFDX [11].
Модуль 15 физического уровня обеспечивает параллельную обработку в реальном масштабе времени сигналов всех b широкодиапазонных радиочастотных модулей 16, необходимых совместно с модулями 17 для организации линий передачи данных в ДКМВ и MB диапазонах. Причем при неисправности одного из модулей 16, соединенного с бортовым широкодиапазонным антенно-фидерным устройством 17, программно подключается взамен вышедшего из строя модуля 16 другой исправный модуль 16 с помощью модуля 14 канального уровня, выполненного, например, на универсальном вычислителе. В этом случае все функции обработки и формирования сигнала соответствующего радиоканала связи, обработки данных и закрытия информации (при необходимости) будут выполнены программным способом в виде законченных программных модулей. Взаимодействие программных модулей будет осуществляться по заранее определенным правилам взаимодействия (протоколам и процедурам взаимодействия, входным и выходным данным), что обеспечит их оперативное изменение (замена программного кода), при необходимости, в процессе полета. Это обеспечивает возможность формирования и обработки любого сигнала и данных, закрытие информации, интерфейс с внешним оборудованием по различным алгоритмам и стандартам даже в том случае, когда ПО 3 находится на границах 2 зон ответственности автоматизированных систем управления воздушным (морским) движением, в которых для обмена данными между НК 1 и ПО 3 используются различные режимы линии передачи данных, например, VDL-2 и VDL-4. Таким образом, на уровне каналов связи (физический, канальный уровни, включая криптозащиту канала, доступа к сети) модуль 16, соединенный с бортовым ШД АФУ 17, совместно с модулем 15 физического уровня и модулем 14 канального уровня обеспечивают совместимость с различными типами линий передачи данных. Кроме этого модуль 15 осуществляет установку частоты передачи, ширину полосы, и т.д. Модуль 15 строится на быстродействующих сигнальных процессорах, которые включает в себя:
- интерфейсы и шлюзы (ввода-вывода и преобразования данных) на базе, например, матрицы шлюзов, программируемых полями (FPGA (Field Programmable Gate Array)) no технологии PCI(VME);
- сигнальные процессоры, например, типа DSP ADSP-21060 (фирмы Analog Devices), программируемых логических интегральных схем EPF10K50 (фирмы Altera), контроллеров AVR ATmega16 (фирмы Atmel) для контроля и управления процессом обработки (для модемов-кодеков, фильтров);
- универсальный вычислительный процессор, реализующий протоколы обмена данными, обнаружение и изоляцию неисправностей внутри модуля 15, реконфигурацию модуля 15.
На момент подачи заявки разработаны алгоритмы функционирования и соответствующее программное обеспечение заявляемой системы радиосвязи. Узлы, связи и шины 1-31 одинаковые с прототипом. Вычислители 32 могут быть выполнены на УВМ РАМЭК-014-002 РАМГ.466226.014-002. Бортовые широкодиапазонные антенно-фидерные устройства могут быть выполнены, например, на комбинации антенн MB и ДКМВ диапазонов, разделенных по частоте соответствующими полосовыми фильтрами.
Оборудование ПО 3 может быть представлено в качестве абонентского радиотерминала, имеющего в своем составе, например, по два приемо-передающих радиоканала MB и ДКМВ диапазонов и два приемных радиоканала ДКМВ диапазона. Оборудование НК 1 в некоторых случаях может представлять собой комплекс адаптивной радиосвязи, состоящий из нескольких наземных антенн и радиостанций MB диапазона, наземных антенн и радиостанций ДКМВ диапазона, автоматизированных рабочих мест.
Заявляемая модель имеет следующие преимущества:
- за счет резервирования оборудования радиоканалов и использования работающих параллельно (в горячем резерве) двух вторых бортовых вычислителей повышается аппаратурная надежность;
- повышается надежность связи за счет постоянной оценки отношения сигнал/шум в модуле физического уровня при цифровой обработке сигналов и автоматической реконфигурации бортового оборудования таким образом, что постоянно выбирается информация по шине 18 именно с того радиоканала, сообщения с которого в данный момент времени наиболее достоверны.
Литература:
1. Патент РФ №44907 U1. М. кл. Н04В 7/00, 2005.
2. Патент РФ (полезная модель) №52290 U1, М. Кл. Н04В 7/26.
3. Патент РФ (полезная модель) №68211 U1, М. Кл. Н04В 7/26 (прототип).
4. Автоматизированные системы управления воздушным движением: Новые информационные технологии в авиации: Учеб. Пособие / P.M. Ахмедов, А.А. Бибутов, А.В. Васильев и др.; под ред. С.Г. Пятко и А.И. Красова. - СПб.: Политехника, 2004.
5. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.; Сов. Радио, 1971, 367 с.
6. Б.И. Кузьмин «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM. Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
7. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
8. RTCA/DO-297. Руководство по разработке ИМА и рассмотрение ее сертификации. 2005.
9. ARINC 651. Руководство по разработке интегрированной модульной авионики. 1991.
10. ARINC 653-1. Стандартные интерфейсы программного обеспечения приложений авионики. 2003.
11. ARINC 664. Бортовая сеть передачи данных. В 7-ми частях. 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2686456C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2791262C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
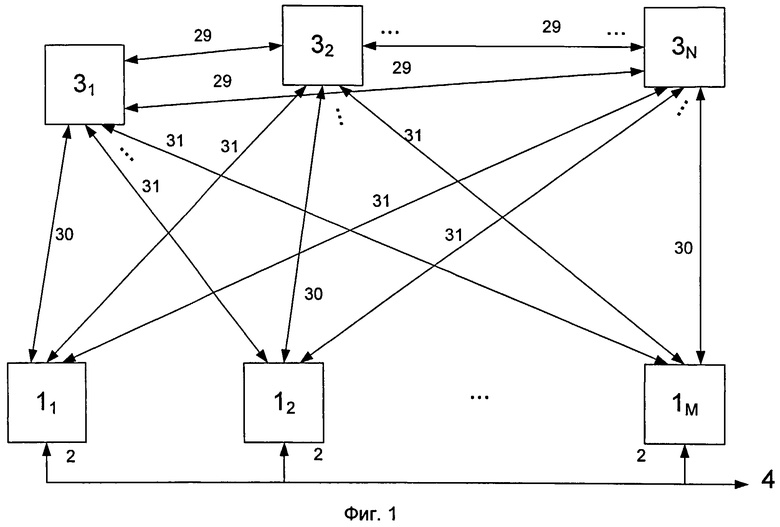
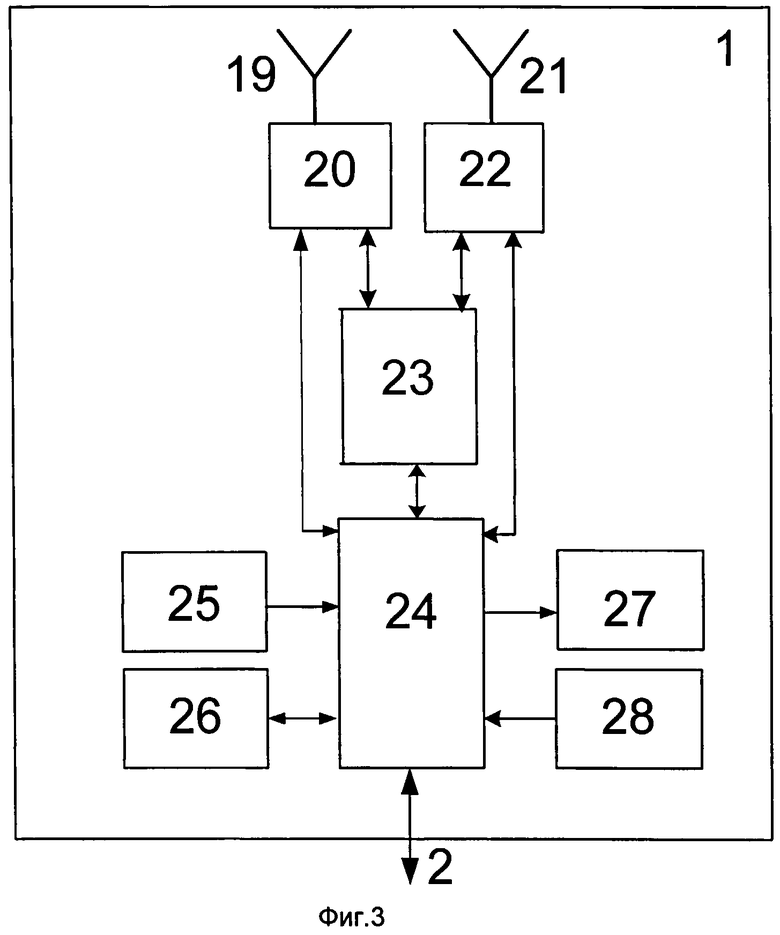
Изобретение относится к радиосистемам обмена данными и может быть использовано для информационного обмена между подвижными объектами (ПО), наземными комплексами (НК). Технический результат состоит в повышении аппаратурной надежности бортового оборудования и надежности связи. Для этого в подвижный объект введены два параллельно работающих вторых бортовых вычислителя, связанных между собой двухсторонними связями и подключенных двухсторонними связями к первым бортовым вычислителям, модулям интерфейсов с бортовым оборудованием, модулям маршрутизации, модулям канального уровня, модулям физического уровня и широкодиапазонным радиочастотным модулям каждого из двух радиоканалов. 3 ил.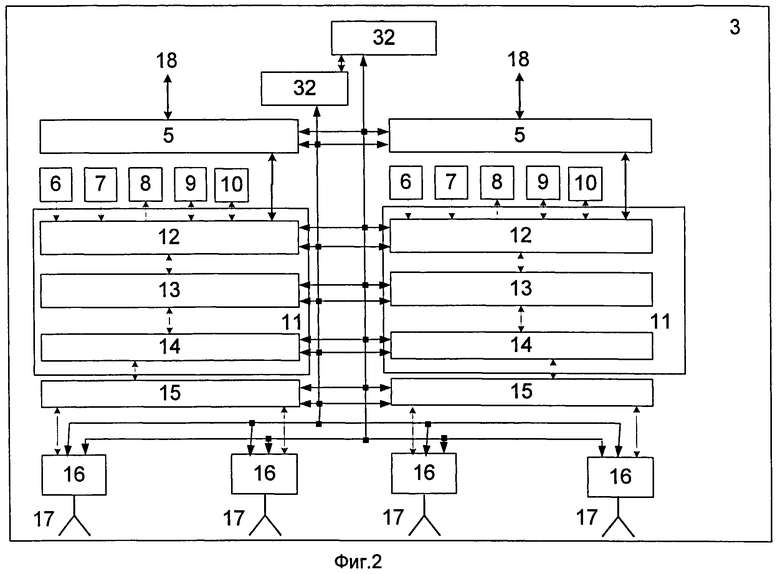
Система радиосвязи с подвижными объектами (ПО), имеющая в своем составе М территориально разнесенных наземных комплексов (НК) и N подвижных объектов, связанных между собой каналами радиосвязи MB диапазона, а с помощью каналов радиосвязи MB и ДКМВ диапазонов - с М наземными комплексами, которые связаны между собой через наземную сеть передачи данных, каждый подвижный объект которой содержит радиоканал в составе: бортовой вычислитель, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, b пар соединенных между собой бортовых широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, входы/выходы которых двусторонними связями подключены к модулю физического уровня, подключенного к вычислительному модулю связи, состоящему из последовательно соединенных двунаправленными связями модуля канального уровня, модуля маршрутизатора и модуля интерфейса, входы которого подключены к бортовым датчикам, приемнику глобальной навигационной спутниковой системы, выход - к блоку регистрации данных, а первый вход/выход - к бортовому анализатору типа принимаемых сообщений, второй вход/выход - к бортовому формирователю типа ретранслируемых сообщений, третий вход/выход - к бортовому вычислителю, где b - необходимое для получения заданных показателей надежности число пар соединенных между собой бортовых широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, а каждый наземный комплекс которой содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ), второй вход/выход которого подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, первый вход подключен к приемнику сигналов глобальных навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход подключен к пульту управления АРМ, а выход - к монитору АРМ, четвертый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции ДКМВ диапазона, а пятый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции MB диапазона, отличающаяся тем, что в подвижный объект введены оборудование второго радиоканала, два параллельно работающих вторых бортовых вычислителя, связанных между собой двухсторонними связями и подключенных двухсторонними связями к первым бортовым вычислителям, модулям интерфейсов с бортовым оборудованием, модулям маршрутизации, модулям канального уровня, модулям физического уровня и широкодиапазонным радиочастотным модулям каждого из двух радиоканалов.
| Тихоходный электродвигатель | 1944 |
|
SU68211A1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Щетка | 1934 |
|
SU44907A1 |
| ФУРМЕННОЕ УСТРОЙСТВО ДОМЕННОЙ ПЕЧИ | 1937 |
|
SU52289A1 |
| Транспортный газогенератор | 1936 |
|
SU52291A1 |

