Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена по радиоканалам между наземными комплексами (НК) и источниками (получателями) информации, расположенными на воздушных подвижных объектах (ПО).
В системе радиосвязи с подвижными объектами [1], во время движения воздушные объекты, находящиеся в пределах радиогоризонта, обмениваются данными с наземным комплексом связи с помощью всенаправленного излучения бортовой антенной радиосигналов передатчика. Принимаемые наземным комплексом связи из канала «Воздух-Земля» сообщения через аппаратуру передачи данных (АПД) поступают в вычислитель автоматизированного рабочего места (АРМ) оператора, где в соответствии с принятым в системе протоколом обмена производится идентификация принятого в сообщении адреса с хранящимися в его памяти адресами подвижных объектов. При совпадении адреса подвижного объекта с хранящимся в списке адресом информация о местоположении, параметрах движения ПО и состоянии его датчиков выводится на экран монитора наземного АРМ. В вычислителе АРМ на базе ПЭВМ решается задача обеспечения непрерывной радиосвязи со всеми N ПО. При выходе за пределы радиогоризонта хотя бы одного из ПО или приближении к границе зоны устойчивой радиосвязи определяют программно один из ПО, который назначается ретранслятором сообщений. По результатам анализа местоположения и параметров движения остальных ПО определяют оптимальные пути доставки сообщений к удаленному от НК за радиогоризонт ПО. Сообщение от НК через последовательную цепочку, состоящую из (N-1) ПО, может быть доставлено N-му ПО. Для этого на НК в формирователе типа ретранслируемых сообщений в заранее определенные разряды (заголовок) передаваемой кодограммы закладывают номер ПО, назначенного ретранслятором, и адреса воздушных объектов, обеспечивающих заданный трафик сообщения. Принятые с помощью всенаправленной бортовой антенны на подвижном объекте сообщения анализируют в блоке анализа типа сообщений. После анализа решают вопрос о направлении данных по двунаправленной шине в систему управления подвижного объекта или ретрансляции их на соседний ПО.
Формирователи типа ретранслируемых сообщений позволяют обеспечить обмен цифровыми данными по каналу «оператор-пилот» (CPDLC) взамен существующей речевой информации. Они предназначены для выбора элементов сообщений разрешения/информации/запроса, которые соответствуют принятой речевой фразеологии, и набора произвольного текста. Отображение набираемых и принятых сообщений осуществляют на блоке регистрации данных ПО и мониторе АРМ НК соответственно.
Сообщения с выходов приемников сигналов глобальных навигационных спутниковых систем ГЛОНАСС/GPS записывают в память наземного и бортового вычислителей с привязкой к глобальному времени и используют для расчета навигационных характеристик и параметров движения каждого ПО. Принятые на НК навигационные сообщения от всех ПО обрабатывают в вычислителе и выводят на экран монитора АРМ.
Однако указанной выше системе присущи следующие недостатки, связанные с круговой формой диаграммы направленности по азимуту бортовой антенны, вследствие чего резко снижается помехозащищенность и уменьшается дальность устойчивой связи и увеличиваются потери связи при маневрах подвижного объекта.
Кроме того, оборудование системы состоит из аппаратных блоков с низкой аппаратурной надежностью, которое во время полета может выходить из строя и влиять на безопасность полетов.
Известна система радиосвязи с подвижными объектами [2]. Она отличается от упомянутой выше системы тем, что в ней дополнительно введены резервные наземные и бортовые средства связи, в том числе радиостанции ДКМВ дальней связи. Система радиосвязи с подвижными объектами [2] имеет в своем составе N подвижных объектов, связанных каналами MB радиосвязи «Воздух-Воздух» между собой, связанных каналами MB радиосвязи «Воздух-Земля» и каналами ДКМВ радиосвязи «Воздух-Земля» с М территориально разнесенными наземными комплексами, которые соединены между собой и с соответствующими диспетчерскими пунктами управления воздушным движением и авиалиниями через наземную сеть передачи данных.
В состав наземного комплекса связи входят наземные антенны MB и ДКМВ диапазонов, связанные соответственно с радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места, второй вход/выход которого подключен в управляющему входу радиостанции ДКМВ, третий вход/выход подключен к входу/выходу наземной системы связи, первый вход подключен к приемнику сигналов навигационных спутниковых систем (ГЛОНАС/GPS), второй вход подключен к пульту управления АРМ, третий вход - к формирователю типа ретранслируемых сообщений, а выход - к монитору АРМ.
Подвижный объект оснащен бортовым комплексом связи, в состав которого входят всенаправленные бортовые антенны MB и ДКМВ диапазонов, подключенные к радиостанциям MB и ДКМВ диапазонов, соответственно, которые соединены двухсторонними связями через бортовую аппаратуру передачи данных с первым входом/выходом бортового вычислителя, второй вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом, третий вход/выход - к анализатору типа принимаемых сообщений, четвертый вход/выход - к управляющему входу/выходу радиостанции ДКМВ диапазона, входы - к бортовым датчикам, формирователю типа ретранслируемых сообщений, приемнику сигналов навигационных спутниковых систем, выход - к блоку регистрации данных.
Недостатки аналога связаны с искажением формы диаграммы направленности по азимуту, углу места при затенении бортовых антенн при крене и тангаже планером воздушных объектов, вследствие чего резко уменьшается дальность устойчивой связи.
Известна система радиосвязи с подвижными объектами [3], которая имеет в своем составе М территориально разнесенных наземных комплексов и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а с помощью каналов радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов - с М наземными комплексами. НК связаны между собой через наземную сеть передачи данных, через которую обеспечивается непрерывный обмен данными. Каждый подвижный объект содержит бортовой вычислитель, первый вход/выход которого подключен к двунаправленной шине системы управления подвижным объектом. В наземном комплексе содержатся наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, которые подключены двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места. Второй вход/выход АРМ подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, первый вход подключен к приемнику сигналов навигационных спутниковых систем (ГЛОНАСС/GPS), второй вход - к пульту управления АРМ, а выход - к монитору АРМ. На каждом подвижном объекте имеются b пар соединенных между собой бортовых всенаправленных широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей, входы/выходы которых в соответствии с эталонной моделью взаимодействия открытых систем двусторонними связями подключены к модулю физического уровня (МФУ). Входы/выходы МФУ подключены к вычислительному модулю связи, состоящему из последовательно соединенных двунаправленными связями модуля канального уровня, модуля маршрутизатора (ММ) и модуля интерфейса (МИ). Входы МИ подключены к бортовым датчикам, приемнику навигационной спутниковой системы, выход - к блоку регистрации данных, а первый вход/выход - к бортовому анализатору типа принимаемых сообщений, второй вход/выход - к бортовому формирователю типа ретранслируемых сообщений, третий вход/выход - к бортовому вычислителю. Кроме того, в каждом наземном комплексе четвертый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции ДКМВ диапазона, а пятый вход/выход вычислителя автоматизированного рабочего места подключен к первому управляющему входу наземной радиостанции MB диапазона, где b - необходимое для получения заданных показателей надежности число пар соединенных между собой бортовых всенаправленных широкодиапазонных антенно-фидерных устройств и широкодиапазонных радиочастотных модулей.
Недостатки аналога связаны с искажением формы диаграммы направленности по азимуту, углу места из-за затенения бортовых антенн при крене и тангаже металлическим планером воздушных объектов, вследствие чего резко уменьшается дальность устойчивой связи по сравнению с прямой (оптической) видимостью. Кроме того, потери мощности передаваемых радиосигналов, их искажения из-за нелинейности фазочастотной и неравномерности амплитудно-частотной характеристик в заданном диапазоне частот в передающем и приемном трактах также уменьшают дальность устойчивой связи и снижают помехозащищенность.
Наиболее близкой по назначению и большинству существенных признаков является система радиосвязи с подвижными объектами [4], которая принята за прототип. В этой системе М территориально разнесенных наземных комплексов связи и N подвижных объектов связаны между собой каналами связи «Воздух-Воздух» MB диапазона, а каналами радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов с М наземными комплексами. Наземные комплексы соединены между собой и с внешними абонентами через наземную сеть передачи данных. Каждый подвижный объект содержит n бортовых широкодиапазонных антенн, соединенных непосредственно с n бортовыми широкодиапазонными радиочастотными приемо-передающими модулями. Модуль физического уровня подключен двухсторонними связями через последовательно соединенные модуль канального уровня, модуль маршрутизатора и модуль интерфейсов к бортовому вычислителю, имеющему двунаправленный интерфейс бортовой системы управления подвижным объектом. Входы модуля интерфейса подключены к бортовым датчикам и приемнику сигналов глобальной навигационной спутниковой системы. Выход бортового вычислителя подключен к блоку регистрации данных. Второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений. Каждый наземный комплекс содержит наземные антенны MB и ДКМВ диапазонов, связанные соответственно с наземными радиостанциями MB и ДКМВ диапазонов, подключенными двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Второй вход/выход АРМ подключен к входу/выходу НК для наземной сети передачи данных, третий вход/выход - к формирователю типа ретранслируемых сообщений, четвертый и пятый входы/выходы - к вторым входам/выходам наземных радиостанций MB и ДКМВ диапазонов соответственно. Первый вход вычислителя АРМ подключен к наземному приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ, На каждом ПО n фазовращателей подключены двухсторонними связями как к соответствующим входам/выходам n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, так и к n входам/выходам модуля физического уровня. Управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя.
Недостатками прототипа являются снижение помехозащищенности системы и уменьшение дальности устойчивой связи, связанные с искажением формы диаграммы направленности по азимуту, углу места и затенением бортовыми антеннами при крене и тангаже воздушных объектов направления на вызываемый абонент. Кроме того, потери мощности передаваемых радиосигналов в радиочастотных кабелях антенно-фидерных трактов, их искажения из-за нелинейности фазочастотной и неравномерности амплитудно-частотной характеристик в заданном диапазоне частот в передающем и приемном трактах также уменьшают дальность устойчивой связи и снижают помехозащищенность.
Технической задачей, на решение которой направлено заявляемое изобретение, является повышение помехозащищенности системы и увеличение дальности устойчивой связи за счет введения в бортовые антенно-фидерные тракты не искажающих фазочастотную и амплитудно-частотную характеристики узлов на радиофотонных элементах, управляемых с помощью бортового вычислителя и распределения n бортовых широкодиапазонных антенн, и n бортовых широкодиапазонных радиочастотных приемо-передающих модулей на четыре группы, каждая из которых формирует свою диаграмму направленности в соответствующей полусфере, сдвинутой относительно соседних на 90°.
Указанный технический результат достигается тем, что в систему радиосвязи с подвижными объектами на радиофотонных элементах, состоящую из М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а каналами радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных, при этом каждый подвижный объект содержит n бортовых широкодиапазонных антенн, n бортовых широкодиапазонных радиочастотных приемо-передающих модуля, модуль физического уровня, подключенный двухсторонними связями через последовательно соединенные модуль канального уровня, модуль маршрутизатора и модуль интерфейсов к бортовому вычислителю, имеющему двунаправленный интерфейс бортовой системы управления подвижным объектом, n фазовращателей, подключенных двухсторонними связями к n входам/выходам модуля физического уровня, при этом управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя, входы модуля интерфейсов подключены к бортовым датчикам, приемнику сигналов глобальной навигационной спутниковой системы, выход модуля интерфейсов подключен к блоку регистрации данных, второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений, дополнительно введены оптический приемопередатчик, подключенный двухсторонними связями с одной стороны к входам/выходам n фазовращателей, а с другой стороны - к входам/выходам 2n волоконно-оптических линий связи, которые подключены двухсторонними связями соответственно к четырем групповым оптическим приемопередатчикам, входы/выходы которых через четыре группы n бортовых широкодиапазонных радиочастотных приемо-передающих модуля подключены к входам/выходам четырех групп n бортовых широкодиапазонных антенн, управляющие входы/выходы оптического приемопередатчика и четырех групповых n оптических приемопередатчиков подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя, при этом количество узлов n выбирается исходя из назначения системы.
В оптическом приемопередатчике излучение первого лазера через первый оптический разветвитель поступает на входы для несущей частоты n первых оптических модуляторов, на информационные входы которых подаются выходные сигналы n фазовращателей, а выходы первых оптических модуляторов подключены к соответствующим входам первого оптического коммутатора, выходы которого соединены с входами n первых ВОЛС, выходы л вторых ВОЛС через второй оптический коммутатор подключены к входам четырех параллельных ветвей оптического приемопередатчика, каждая из которых состоит из последовательно соединенных фотодетекторов i-й группы и фильтров нижних частот (ФНЧ) i-й группы, выходы ФНЧ i-й группы подключены к входам n фазовращателей, выходы n первых ВОЛС подключены к соответствующим входам четырех параллельных ветвей групповых оптических приемопередатчиков, каждая из которых состоит из последовательно соединенных оптических коммутаторов на прием i-й группы, фотодетекторов i-й группы, ФНЧ i-й группы, выходы ФНЧ групповых оптических пртемопередатчиков подключены к соответствующим входам четырех групп n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, выходы которых через соответствующие оптические модуляторы i-й группы каждого оптического пртемопередатчика подключены к соответствующим входам оптического коммутатора на передачу i-й группы, выходы которого соединены с входами n вторых ВОЛС, излучение лазера i-й группы каждого оптического пртемопередатчика через оптический разветвитель i-й группы поступает на входы для несущей частоты оптических модуляторов i-й группы, выходы контроля первого лазера и лазеров i-й группы подключены к соответствующим входам бортового вычислителя, сигналы управления первого и второго оптических коммутаторов, оптических коммутаторов на прием и на передачу i-й группы подключены к соответствующим управляющим выходам бортового вычислителя, при этом количество групп i равно четырем, общее количество узлов в четырех группах равно n, а количество узлов в каждой группе определяется назначением бортового комплекса связи.
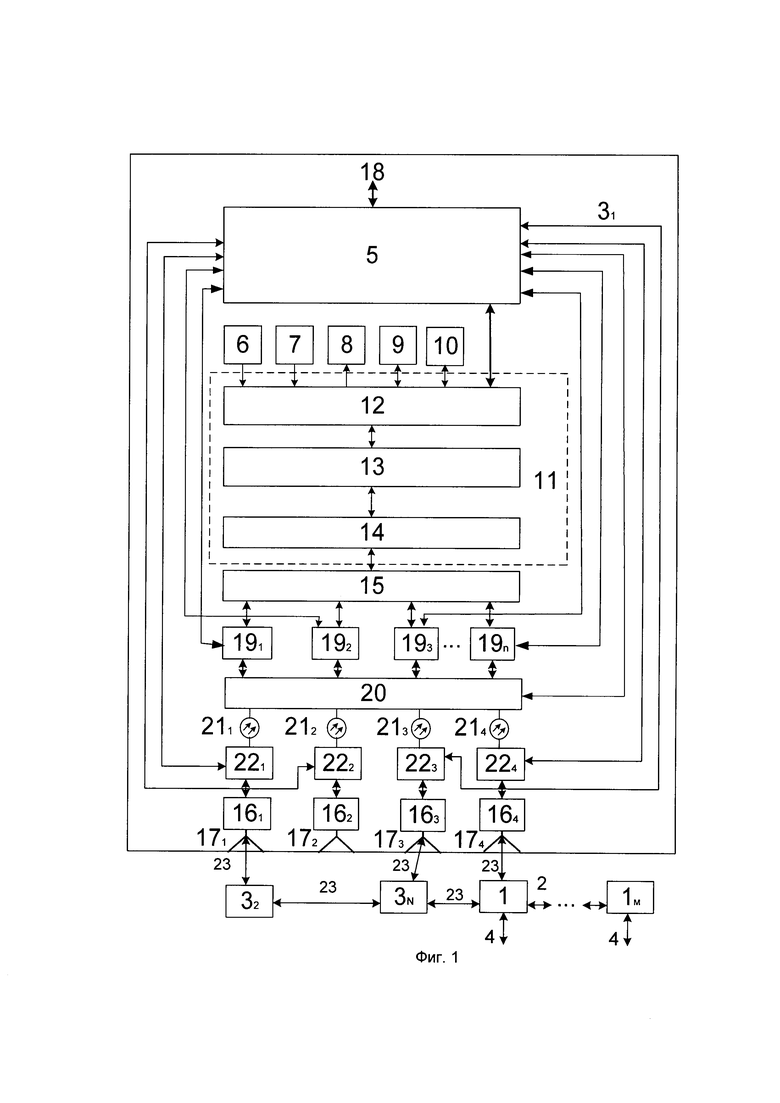
Структурная схема заявляемой системы радиосвязи с ПО с применением радиофотонных элементов представлена на фиг. 1, где введены обозначения:
1 - наземный комплекс связи (НК); 2 - наземная сеть передачи данных; 3 - бортовой комплекс связи подвижного объекта (ПО); 4 - входы/выходы наземного комплекса связи 1 с внешними абонентами; 5 - бортовой вычислитель; 6 - бортовые датчики; 7 - бортовой приемник сигналов глобальной навигационной спутниковой системы, например, ГЛОНАСС/GPS с антенной; 8 - блок регистрации данных; 9 - бортовой анализатор типа принимаемых сообщений; 10 - бортовой формирователь типа ретранслируемых сообщений; 11 - вычислительный модуль связи (ВМС); 12 - модуль интерфейсов с бортовым оборудованием (МИ); 13 - модуль маршрутизации (ММ); 14 - модуль канального уровня (МКУ); 15 - модуль физического уровня (МФУ) (цифровой обработки сигналов); 16 - четыре группы n бортовых широкодиапазонных радиочастотных приемо-передающих модулей (ШД РППМ); 17 - четыре группы n бортовых широкодиапазонных антенн (ШД А); 18 - двунаправленная шина системы управления подвижным объектом; 19 - n фазовращателей; 20 - оптический пртемопередатчик; 21 - 2n волоконно-оптических линий связи (ВОЛС); 22 - четыре групповых оптических приемопередатчиков; 23 - радиоканалы связи «Воздух-Воздух» и «Воздух-Земля» MB и ДКМВ диапазонов.
Предлагаемая система радиосвязи с ПО с применением радиофотонных элементов содержит М территориально разнесенных наземных комплексов 1 и N подвижных (воздушных) объектов, оснащенных бортовыми комплексами 3 связи, связанных между собой и с НК 1 радиоканалами 23 связи «Воздух-Воздух» и «Воздух-Земля» MB и ДКМВ диапазонов. НК 1 объединены между собой и наземными пользователями, не указанными на фиг. 1, с помощью наземной сети 2 передачи данных и входов/выходов 4 НК 1.
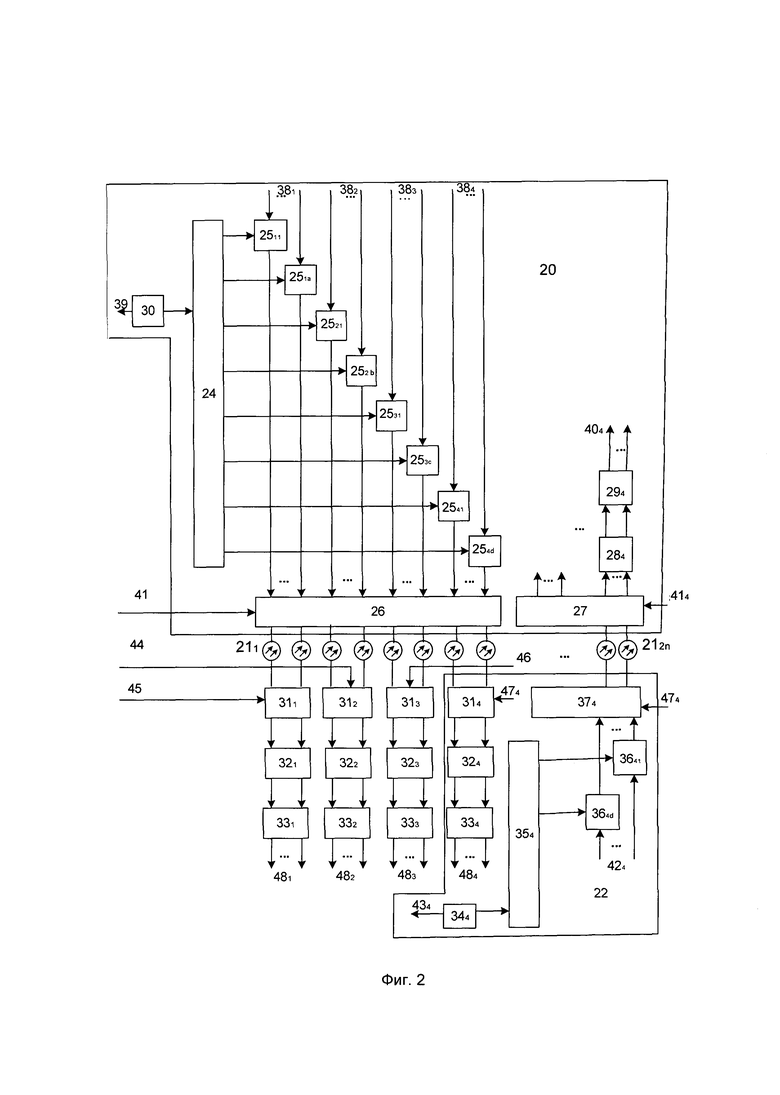
Структурная схема оптического пртемопередатчика 20, соединенного с помощью четырех групп волоконно-оптических линий 21 связи в количестве 2n с оборудованием четырех групповых оптических пртемопередатчиков 22 заявляемой системы радиосвязи с подвижными объектами, приведена на фиг. 2.
На фиг. 2 в составе оптического пртемопередатчика 20 обозначены:
24 - первый оптический разветвитель; 25 - n первых оптических модуляторов; 26 - первый оптический коммутатор; 27 - второй оптический коммутатор; 28 - d фотодетекторов четвертой группы; 29 - d фильтров нижних частот (ФНЧ) четвертой группы; 30 - первый лазер.
На фиг. 2 в составе каждого группового оптического пртемопередатчика 22 обозначены:
31 - четыре группы оптических коммутаторов на прием; 32 - четыре группы фотодетекторов; 33 - четыре группы ФНЧ; 34 - лазер четвертой группы; 35 - оптический разветвитель четвертой группы; 36 - d оптических модуляторов четвертой группы; 37 - оптический коммутатор на передачу четвертой группы.
На фиг. 2 так же обозначены:
38 - выходные сигналы n фазовращателей; 39 - выход контроля первого лазера 30; 40 - d выходов ФНЧ 29 четвертой группы оптического приемопередатчика 20; 41 - сигналы управления узлами 26 и 27; 42 - входные сигналы d бортовых широкодиапазонных радиочастотных приемо-передающих модулей 16 четвертой группы; 43 - выход контроля лазера 34 четвертой группы; 44 - сигналы управления узлами 312; 45 - сигналы управления узлами 311; 46 - сигналы управления узлами 313; 47 - сигналы управления узлами 314 и 374; 48 - выходы ФНЧ первой, второй третьей и четвертой групп.
Причем, n ШД А 17 подключены непосредственно, например, методом пайки, к n ШД РППМ 16. За счет интеграции в конструкцию подвижных объектов бортовых широкодиапазонных радиочастотных приемо-передающих модулей 16 и n ШД А 17 создается «интеллектуальная обшивка», например, на фюзеляже самолета [5, 6], что позволяет организовать за счет применения четырех групп узлов 16, 17, работающих каждый в своей полусфере пространства, и радиофотонных элементов 20, 21, 22 систему радиосвязи с круговой зоной связи по азимуту. Возможность передачи радиосигналов различных диапазонов с помощью радиофотонных элементов проверена экспериментально, на них основаны перспективные радиоэлектронные средства [5, 6].
Фазовращатели 19 и другие узлы, наиболее чувствительные к изменениям климатических и механических условий, могут быть установлены, например, в обитаемом отсеке подвижного объекта рядом с бортовым вычислителем 5, обычно удаленным от узлов 16 и 17. Фазовращатели 19 связаны с соответствующими входами/выходами модуля 15 физического уровня, который имеет двухсторонний цифровой интерфейс с модулем 14 канального уровня, связанным двухсторонним цифровым интерфейсом с модулем 13 маршрутизации, подключенным двухсторонним цифровым интерфейсом к модулю 12 интерфейсов с бортовым оборудованием, входы которого подключены к бортовым датчикам 6, приемнику 7 сигналов глобальных навигационных спутниковых систем. Выход МИ 12 подключен к блоку 8 регистрации данных, второй вход/выход его подключен к бортовому анализатору 9 типа принимаемых сообщений, третий вход/выход - к бортовому формирователю 10 типа ретранслируемых сообщений, четвертый вход/выход - к бортовому вычислителю 5, связанному с помощью двунаправленного интерфейса 18 с бортовой системой управления ПО, не показанной на фиг. 1.
На фиг. 2 для примера приведена также структурная схема одного из оптических пртемопередатчиков 22 i-й группы (четвертой). Индексы, стоящие в обозначении узлов на фиг. 1 и фиг. 2, характеризуют следующее: первый индекс-номер группы (полусферы пространства, в которую направлен главный луч диаграммы направленности бортовых широкодиапазонных антенн 17 каждой группы), второй индекс - номер узла в группе, так, в первой группе - а узлов, во второй - b узлов, в третьей - с узлов, в четвертой - d узлов. Сумма индексов a+b+c+d - n. Число узлов в каждой группе определяется назначением бортового комплекса 3 связи. Например, при наличии менее 20 абонентов в каждой полусфере пространства числа а, b, с, d могут быть выбраны равными четырем.
Оптические коммутаторы 26 и 27, 31 и 37, управляемые бортовым вычислителем 5, используются при проведении следующих процедур: при перераспределении радиосигналов в случае отказа одного из оптических модуляторов 25 или 36, волоконно-оптической линии связи 21, при исключении передачи по ВОЛС 21 отдельных радиосигналов (уменьшении энергетического потенциала), при малом расстоянии между абонентами (адаптация по мощности), при повышении энергетического потенциала при нахождении абонента в секторах, где пересекаются соседние полусферы (диаграммы направленности соседних групповых бортовых широкодиапазонных антенн 17).
Тракты обработки входных сигналов 42 для d бортовых широкодиапазонных радиочастотных приемо-передающих модулей 16 для упрощения показаны на примере последовательности операций в четвертой группе. Сигналы проходят обработку в каждом из d оптических модуляторов 36 четвертой группы, на второй вход которых, через оптический разветвитель 35 четвертой группы, подаются оптические сигналы лазера 34 четвертой группы. С выхода 43 снимаются сигналы контроля лазера 34 четвертой группы. Оптические сигналы объединяются и распределяются в оптическом коммутаторе 37 на передачу четвертой группы и через соответствующие ВОЛС 21 поступают на второй оптический коммутатор 27. Коммутаторы 37 и 27 управляются с помощью команд 474 и 414 с бортового вычислителя 5. Затем, пройдя последовательную цепочку, состоящую из d фильтров нижних частот 294 четвертой группы, d фотодетекторов 284 четвертой группы в форме видеосигнала поступают на выходы 404 для фазовращателей.
В первой, второй и третьей группах осуществляются операции, аналогичные указанным в четвертой группе. Выходные сигналы 38 n фазовращателей модулируются в каждом оптическом модуляторе 25, на второй вход которых через второй оптический разветвитель 24 подаются оптические сигналы второго лазера 30. С выхода 39 снимаются сигналы контроля второго лазера 30. Оптические сигналы объединяются и распределяются в втором оптическом коммутаторе 26 на передачу и через соответствующие ВОЛС 21 поступают на оптические коммутаторы 31 на прием четырех групп. Коммутаторы 31 управляются с помощью команд 44, 45, 46, 47 с бортового вычислителя 5. Затем, пройдя последовательную цепочку, состоящую, из d фотодетекторов 32, фильтров 33 нижних частот в форме видеосигнала поступают на выходы 48.
Наземный комплекс 1 системы для работы с бортовым комплексом 3 связи может содержать, например [4], наземные антенны MB и ДКМВ диапазонов, связанные с наземными радиостанциями MB и ДКМВ диапазонов и подключенные двухсторонними связями через наземную аппаратуру передачи данных к первому входу/выходу вычислителя автоматизированного рабочего места (АРМ). Второй вход/выход вычислителя АРМ подключен к входу/выходу 4 НК 1 для потребителей информации, третий вход/выход - к формирователю типа ретранслируемых сообщений, четвертый и пятый входы/выходы - к вторым входам/выходам наземных радиостанций MB и ДКМВ диапазонов соответственно. Первый вход вычислителя АРМ подключен к наземному приемнику сигналов глобальных навигационных спутниковых систем, второй вход - к пульту управления АРМ, а выход - к монитору АРМ.
Предлагаемая система радиосвязи с ПО с применением радиофотонных элементов обеспечивает передачу данных в MB диапазоне в режиме ретрансляции с НК 1 с помощью бортовых комплексов 3 связи по цепочке последовательно соединенных первого ПО, второго ПО и далее до N-го ПО, а передачу данных с N-го ПО на НК 1 осуществляют в обратном порядке. Передачу данных в ДКМВ диапазоне с бортового комплекса 3 связи ПО осуществляют на тот наземный комплекс 1, качество приема маркера которого является наилучшим или приемлемым для данного подвижного объекта. Наземную сеть 2 передачи данных подключают двухсторонними интерфейсами к каждому из М разнесенных территориально НК1. Таким образом, наземной сетью 2 передачи данных по информационному взаимодействию объединяют между собой все НК 1 и обеспечивают соединение каждого НК 1 с наземными пользователями системы радиосвязи.
При отсутствии помех алгоритм обмена данными, например, в симплексном режиме в соответствии с протоколом TDMA в заявляемой системе радиосвязи с ПО заключается в том, что в ней проводят следующие операции:
- назначают каждому НК 1 на временной интервал длительностью 1-2 часа активную ДКМВ частоту из набора разрешенных частот ДКМВ связи из общего списка частот, оптимальную по условиям распространения радиоволн и электромагнитной совместимости для данного временного интервала, отличающуюся от активных частот всех других НК 1 системы связи. Доводят номер активной частоты вместе с интервалом времени ее активизации до каждого НК 1 через наземную сеть 2 передачи данных, реализуя, таким образом, протокол множественного доступа с частотным разделением (FDMA) (адаптация по частоте);
- определяют каждой разрешенной ДКМВ частоте свой временной сдвиг первого кадра протокола множественного доступа к каналу с временным разделением (TDMA) относительно ведущего кадра, привязанного, например, к 00 час: 00 мин: 00 сек универсального координированного времени UTC для того, чтобы сигналы маркеров на разных частотах излучались НК 1 в разнесенных временных слотах для уменьшения времени анализа качества маркеров, проводимого каждым бортовым комплексом 3 связи подвижного объекта;
- разрабатывают системные таблицы MB и ДКМВ связи, в которой указывают список М наземных комплексов связи 1 с их адресами, координатами, поддерживаемыми ими режимами работы и набором разрешенных частот с указанными сдвигами первого кадра каждой частоты;
- доводят системные таблицы MB и ДКМВ связи до всех НК 1 и всех бортовых комплексов 3 связи подвижного объекта по наземной сети 2 передачи данных и радиоканалам связи;
- осуществляют на каждом НК 1 обмен пакетными данными через наземную сеть 2 передачи данных с пользователями системы, а также с другими (М-1) НК 1;
- реализуют в НК 1 протоколы обмена данными в ДКМВ и MB каналах физического уровня (модемов-кодеков), канального и сетевого уровня, например, в соответствии с ARINC 618, ARINC 631, ARINC 635, ARINC 750, DO-224, ED-108 в режимах HFDL, VDL-1 (ACARS), VDL-2, VDL-4 и других;
- разбивают для обеспечения ДКМВ связи время использования каждого ДКМВ частотного канала на временные кадры для реализации протокола множественного доступа к каналу с временным разделением (TDMA). В первом слоте каждого кадра излучают сигнал маркера, содержащий, например, квитанции на все сообщения, принятые НК 1 от разных бортовых комплексов 3 связи в предыдущих двух кадрах, активные частоты двух соседних НК 1, версию базы данных (системной таблицы), назначения использования слотов с 4-го по 13-тый текущего кадра и слотов 2-го и 3-го следующего кадра, а также флаг занятости канала. В конце каждого кадра для каждого слота следующего кадра производят, например, назначение его использования для передачи с НК 1 или для передачи с конкретного бортового комплекса 3 связи подвижного объекта по его предварительному запросу слота доступа, или для передачи с любого борта ПО в режиме случайного доступа;
- осуществляют обмен пакетными данными «Воздух-Земля» на каждом активном MB и ДКМВ канале с множественным доступом при заданной интенсивности потока сообщений;
- выбирают лучшую частоту связи и регистрируют бортовой комплекс 3 связи подвижного объекта на выбранных частотах MB и ДКМВ каналов на каждом подвижном объекте по результатам оценки качества принятых сигналов маркеров разных НК 1 для каждого диапазона частот;
- инициируют в MB и ДКМВ диапазоне на каждом подвижном объекте процедуру поиска частоты при включении оборудования или после разъединения линии, если бортовой комплекс 3 связи не может больше обнаружить маркеры от наземного комплекса 1 на текущей частоте. После автовыбора частоты и регистрации на новом канале производят обмен пакетными данными, например, в режиме TDMA с НК 1, на котором бортовой комплекс 3 связи подвижного объекта зарегистрирован, до тех пор, пока качество MB и ДКМВ радиоканала превышает допустимый уровень. При ухудшении качества MB и ДКМВ радиоканала ниже допустимого уровня выбирают новый MB и ДКМВ радиоканал и соответствующий ему НК 1, независимо от местоположения НК 1, и регистрируют бортовой комплекс 3 связи подвижного объекта на новом MB и ДКМВ радиоканале (адаптация по пространству);
- реализуют в бортовом комплексе 3 связи подвижного объекта и НК 1 следующие процедуры управления связностью линии передачи данных MB диапазона;
- формируют в бортовых конечных системах бортового комплекса 3 связи подвижного объекта (5-18) пакетное сообщение, содержащее адрес получателя и адрес отправителя (адрес ПО), и передают через модуль 12 интерфейса в бортовой модуль 13 маршрутизатора, где его упаковывают в виде, например, пакета ISO 8208 и затем передают в модуль 14 канального уровня, где его преобразуют в пакет канального уровня сети передачи данных, содержащий проверочные последовательности, вычисленные с помощью избыточного циклического кода (CRC). Полученные сообщения передаются в модуль 15 физического уровня, где осуществляют, например, операции адаптации по времени [4].
Сформированный для передачи ДКМВ или MB радиосигнал, например, многопозиционной фазовой манипуляции (M-PSK, М=2, 4 или 8) с выхода модуля 15 физического уровня с требуемой фазой, заданной соответствующими узлами 19, с помощью управляющих сигналов бортового вычислителя 5 через не искажающие форму и спектр радиосигналов узлы 20, 21, 22 подают на входы а штук ШД РППМ 16 в первой группе, b штук - во второй группе, с штук - в третьей группе, d штук - в четвертой группе, где его усиливают до требуемого уровня мощности, затем через соответствующие бортовые широкодиапазонные антенны 17 по MB или ДКМВ радиоканалам 23 передают на наземный комплекс 1, на котором зарегистрирован бортовой комплекс 3 связи подвижного объекта. Несколько одновременно работающих узлов 16 и 17 в каждой группе необходимы, например, для того, чтобы сформировать в заданном направлении диаграмму направленности требуемой формы с помощью бортового вычислителя 5 и устранить влияние помех на передачу данных.
При наличии помехи проводятся следующие процедуры:
- определяется направление на источник помех путем сканирования пространства с помощью управляющих сигналов бортового вычислителя 5, узлов 19, 16 и 17 в интервалах времени, когда отсутствует обмен данными;
- определяются координаты подвижного объекта по известным прежнему местоположению и параметров движения источника помех с помощью известных в радиолокации методов [7] и передаются соответствующие сообщения на НК 1 (через него и наземную сеть 2 передачи данных на другие НК 1 и подвижные объекты);
- если позволяет ситуация, то осуществляется перевод узлов 15 на другую резервную рабочую частоту или включается режим формирования псевдослучайной перестройки рабочей частоты;
- одновременно с помощью управляющих сигналов бортового вычислителя 5, узлов 19, 26, 27, 31, 37 корректируется форма диаграммы направленности в пространстве с обеспечением минимального усиления в направлении на источник помех;
- для повышения достоверности передачи данных с помощью узлов 5, 11, 16, 17, 19, 26, 27, 31, 37 в соответствующей полусфере пространства формируется луч узконаправленной (игольчатой) формы в направлении абонента, с которым проводится или предстоит провести сеанс связи.
На НК 1 по аналогии с [4] ДКМВ или MB радиосигнал через соответствующие антенну, наземную радиостанцию, аппаратуру передачи данных, поступает на вход вычислителя АРМ, где его упаковывают в пакет, предназначенный для передачи, например, по протоколу Х.25 по наземной сети 2 передачи данных и НК 1 потребителям информации. При передаче пакета, например, по протоколу Х.25 по наземной сети 2 передачи данных в обратном направлении (от потребителя информации) через НК 1 к ПО вначале его обрабатывают в вычислителе АРМ, передают через аппаратуру передачи данных, соответствующие радиостанции и антенны в эфир.
Сформированный на НК 1 радиосигнал, передают по радиоканалу 23 на бортовой комплекс 3 связи подвижного объекта, где он пройдя через ШД А 17, ШД РППМ 16, не искажающие форму и спектр радиосигналов узлы 20, 21, 22, фазовращатели 19, управляемые бортовым вычислителем на соответствующий вход МФУ 15, где его демодулируют, дескремблируют, деперемежают, декодируют с прямой коррекцией ошибок, и выдают в МКУ 14, где его проверяют на наличие не исправленных декодером ошибок и в случае отсутствия ошибок упаковывают, например, в пакет ISO 8208 и выдают на вход ММ 13 для преобразования в пакет, предназначенный для передачи через МИ 12 к бортовым пользователям (блокам 5, 8, 9) или на шину 18.
В процессе обмена пакетными данными в MB диапазоне с наземными пользователями на каждом бортовом комплексе 3 связи подвижного объекта пакетное сообщение формируют в бортовой конечной системе, например, вычислительной системе самолетовождения [8, 9] и осуществляются операции, аналогичные, рассмотренным выше.
Частоты связи MB диапазона, заданные в списке частотной поддержки, являются активными. На каждом НК 1 на активной частоте связи излучают сигналы маркеров в с заданным интервалом, согласно протоколу работы системы. В сигналы маркеров ДКМВ вводят информацию о версии системной таблицы (версии базы данных), об активных частотах двух соседних НК 1, назначения слотов для нового кадра, квитанции на все сообщения от бортового комплекса 3 связи подвижного объекта, принятые в предыдущем кадре, флаг занятости канала. Первый слот отводят под излучение маркера с НК 1.
В системе радиосвязи ведут обмен навигационными и другими данными по радиолинии связи MB диапазона между наземным комплексом 1 и бортовым комплексом 3 связи подвижного объекта, находящимися в пределах радиогоризонта НК 1. По запросу с ПО с наземного комплекса 1 могут быть переданы на него сведения о местоположении, параметрах движения выбранного для связи подвижного объекта. При отсутствии обмена данными с помощью управляющих сигналов бортового вычислителя 5 и узлов 16, 17, 20, 21, 22 и 19 обеспечивается сканирование в рабочем диапазоне частот лучами диаграммы направленности узлов 17 в требуемой полусфере пространства для определения направления на источники сигналов и помех. При обнаружении помехи с помощью управляющих сигналов бортового вычислителя 5 и узлов 16, 17, 20, 21, 22 и 19 автоматически в этом направлении формируется минимум коэффициента усиления суммарной диаграммы направленности, организованной с помощью бортового вычислителя 5 и узлов 20, 21, 22 и 19. В режиме симплексной связи в узле 16 приемное устройство на время передачи блокируется, а в режиме дуплексной связи работа системы осуществляется на разных частотах. В наземном комплексе 1 решают задачи обеспечения постоянной устойчивой радиосвязи со всеми N бортовыми комплексами 3 связи подвижного объекта, и на основе информации о точном местонахождении всех бортовых комплексов 3 связи подвижного объекта и параметрах их движения осуществляют операции запоминания и хранения передаваемых и принимаемых сообщений.
При выходе за пределы радиогоризонта НК 1, хотя бы одного бортового комплекса 3 связи подвижного объекта или приближении его к границе зоны устойчивой радиосвязи, наземный комплекс 1 определяет программно один из ПО, который по адресной части переданной ему кодограммы назначается первым ретранслятором сообщений. При постоянном изменении дальности между ПО и НК 1 в качестве ретранслятора в течение определенного времени может быть назначен любой из N ПО, местоположение которого известно и оптимально по отношению к НК 1 и всем остальным ПО. По анализу местоположения и параметров движения остальных ПО определяют оптимальные пути доставки сообщений к удаленному от НК 1 за радиогоризонт подвижному объекту -получателю сообщения с использованием узкой формы диаграммы направленности, сформированной узлами 16, 17 i-й группы с помощью бортового вычислителя 5 и соответствующих фазовращателей 19. Сообщение от НК 1 через последовательную цепочку, состоящую, при необходимости, из нескольких (от 1 до (N-1)) ПО, может быть доставлено к требуемому бортовому комплексу 3 связи подвижного объекта - получателю информации. Для этого на НК 1 в заранее определенные разряды передаваемой кодограммы закладывают адрес ПО, назначенного первым ретранслятором, при необходимости адреса других подвижных объектов - ретрансляторов, обеспечивающих заданный трафик сообщения, и адрес ПО - получателя. Принятые и обработанные на ПО в устройствах 17, 16, 20, 21, 22, 19, 15, 14, 13, 12 и 5 сообщения, передают в блок 9 анализа типа сообщений. Если сообщение предназначено для данного бортового комплекса 3 связи подвижного объекта, то после анализа решается вопрос о направлении данных по двунаправленной шине 18 на систему управления ПО или о передаче сообщения в режиме ретрансляции к соседнему ПО путем формирования в пространстве соответствующей формы диаграммы направленности путем передачи с фазовращателей 19 через узлы 25, 26, 21, 31, 32, 33 на узлы 16 и 17 радиосигналов требуемой формы. Для исключения коллизий минимизируют число разрядов в передаваемом сообщении и осуществляют ретрансляцию данных последовательно во времени.
Для каждого бортового комплекса 3 связи подвижного объекта траектории движения соседних ПО, при необходимости, отображают на экране бортового блока 8 регистрации данных. Траектории встречных или попутных ПО, с которыми возможна потенциально конфликтная ситуация, с помощью отметок, характеризующих предыдущее местоположение подвижных объектов, так же отображают на экране бортового блока 8 регистрации данных. По мере движения ПО устаревшие отметки стираются. Во время предполетной подготовки каждого подвижного объекта с помощью интерфейса 18 осуществляют загрузку в память бортового вычислителя 5 необходимых данных в виде системной таблицы, содержащей списки адресов, координат наземных комплексов и назначенных им частот связи. В НК 1 системные таблицы загружаются по наземной сети 2 передачи данных.
Принимаемую на бортовом комплексе 3 связи подвижного объекта информацию отображают на экране блока 8 регистрации данных в виде буквенно-цифровых символов или в виде точек и векторов. Сообщения в соответствии с протоколом обмена ставят в очередь соответствующей категории срочности. В бортовом вычислителе 5 определяют время «старения» информации, и, если сообщение в течение промежутка времени, равного времени «старения», не было передано в канал связи, то его «стирают», и посылают запрос на передачу нового сообщения.
Для того, чтобы минимизировать вероятность коллизий случайного доступа, не создавать помех текущей передаче сообщения, применяют процедуры, например, как в режиме VDL-2, множественного доступа к каналу с прослушиванием несущей (CSMA). Для этого в модулях 15 физического уровня и 14 канального уровня бортового комплекса 3 связи подвижного объекта перед передачей каждого сообщения осуществляют прослушивание канала (контроль занятости несущей) на предмет обнаружения преамбулы, заголовка или полезной части сообщений. Подготовленное сообщение с ПО передают только в том случае, когда радиоканал свободен. Для того чтобы разнести во времени моменты выхода на связь разных подвижных объектов и НК 1, когда после занятости канала все корреспонденты обнаружили, что радиоканал свободен, в модуле 14 канального уровня ПО формируют псевдослучайные задержки передачи сообщений от подвижных объектов (для каждого ПО своя) и от НК 1. На каждом из ПО время окончания сигнала несущей частоты в радиоканале и импульсы синхронизации используют для инициализации расчета в модуле 14 канального уровня интервала времени собственной передачи и внутри этого интервала с помощью модуля 15 физического уровня, узлов 19, 20, 21, 22, 16 и 17 бортового комплекса 3 ПО осуществляют передачу собственного пакета данных.
Сообщения о местоположении ПО и параметрах его движения с выходов приемника 7 сигналов глобальных навигационных спутниковых систем, например, ГЛОНАСС/GPS, записывают в память бортового вычислителя 5 с привязкой к глобальному времени [8, 9, 10]. Точная синхронизация слотов, используемых для обмена данными между абонентами системы, и их запланированное использование для передачи известно каждому пользователю по отношению к окружающим пользователям с известными координатами. Управление протоколом доступа к каналу на каждом подвижном объекте осуществляют в модуле 14 канального уровня.
В вычислителе 5 данные о местоположении ПО используют для расчета навигационных характеристик и параметров движения выбранного для связи подвижного объекта. В зависимости от заданного интервала времени выдачи на НК 1 сообщений о местоположении ПО в вычислителе 5 формируют соответствующее сообщение с привязкой к глобальному времени проведения измерения координат ПО. Это время используется в НК 1 для известной операции построения экстраполяционных отметок от ПО [7]. Благодаря наземной сети 2 передачи данных, которая объединяет между собой все М НК 1, информация от удаленного на большие расстояния (до 4-6 тысяч км и более) ПО, оборудованного устройствами 14, 15, 16, 17, 19 20, 21, 22, с функцией управления ДКМВ радиолинией и диаграммами направленности в соответствующей полусфере пространства, даже в сложной помеховой обстановке доводится до всех НК 1 системы радиосвязи, хотя удаленный ПО держит связь только с одним НК 1, качество маркеров которого является наилучшим для ПО на данный момент времени. Во время выполнения подвижным объектом маневра (крена, тангажа и т.п.) с помощью бортового вычислителя 5, учитывающего местоположение ПО и вызываемого абонента, вырабатываются управляющие сигналы, позволяющие удерживать главный лепесток диаграммы направленности бортового комплекса 3 связи на вызываемого абонента, предотвращая таким образом потерю связи.
На ПО в модуле 15, бортовом вычислителе 5 и модулях 14, 13, 12 вычислительного модуля 11 связи автоматически анализируются принимаемые сигналы маркеров от всех наземных комплексов 1 на всех частотах и выбирают лучшую частоту, например, по критерию максимума измеряемого демодулятором при приеме всего пакета отношения сигнал/помеха. По измеренному на выбранной частоте в модуле 15 отношению сигнал/помеха в модуле 14 вычислительного модуля 11 связи выбирают максимально допустимую скорость передачи данных, а также вид модуляции и кодирования. Оценка отношения сигнал/помеха осуществляется всеми НК 1 и ПО системы каждый раз при приеме любого пакета сообщения. Величина выбранной максимальной допустимой скорости передачи данных сообщается на противоположную сторону в виде рекомендуемой скорости передачи данных. В бортовых модулях 15, 14 ПО могут быть использованы известные алгоритмы высокоскоростных адаптивных модемов, рассчитанных на работу в каналах с многолучевостью, например, алгоритм демодуляции с использованием эквалайзера с решающей обратной связью, субоптимальный алгоритм Витерби приема в целом с поэлементным принятием решения в условиях многолучевости, алгоритм максимального правдоподобия с идентификацией текущих параметров канала (импульсной характеристики канала) на основе методов стохастической аппроксимации и другие. Все используемые алгоритмы приема по помехоустойчивости должны удовлетворять требованиям, указанным, например, в ARINC 635 [11].
Таким образом, каждый из бортовых комплексов 3 связи ПО может выходить на связь на нескольких рабочих частотах, известных всем участникам движения. Списки выделенных частот меняются в зависимости от времени года, а рабочая частота для каждого НК 1 из списка выделенных частот активизируется на каждый час или два часа времени суток. При движении подвижный объект выходит на связь, выбирая для связи тот НК 1, условия распространения радиоволн для связи с которым в данный момент времени являются оптимальными. При этом, совсем не обязательно, чтобы выбранный НК 1 был ближайшим. Составленный таким образом канал связи между ПО и наземным потребителем (источником) информации, как правило, будет включать бортовое оборудование ПО, НК 1 и наземную сеть 2 передачи данных. Как только качество канала 23 связи деградирует ниже допустимого уровня, на борту с помощью узлов 5, 14 и 15 ПО выбирают новую вероятностно оптимальную рабочую частоту на основании анализа условий распространения радиоволн и новый, соответствующий ей НК 1. Таким образом, обеспечивают высокую (порядка 0,999) надежность связи при обмене данными с ПО, находящимися от НК 1 на расстояниях от нескольких сотен до (4-6) тысяч километров.
Синхронизация работы системы осуществляется на основе использования всеми участниками движения единого глобального всемирного координированного времени (UTC), получаемого от существующих объектов глобальной навигационной спутниковой системы с помощью приемников 7.
Для взаимодействия наземных комплексов 1, оконечных пользователей и ПО используется наземная сеть 2 передачи данных и входы/выходы 4 НК 1. Она может быть реализована известными способами, например, при межсетевой работе НК 1 через центры коммутации пакетов в соответствии с протоколом Х.25 [4]. Соединения между НК 1 и центрами коммутации пакетов Х.25 (маршрутизаторами) могут обеспечиваться через специально выделенные или арендуемые каналы связи. Они позволят транслировать сообщение, адресованное наземным пользователем определенному ПО на тот наземный комплекс 1, на котором данный ПО «зарегистрирован», и где в данный момент времени обеспечиваются оптимальные условия ДКМВ приема. Система радиосвязи с ПО работает в автоматическом режиме без вмешательства оператора на выбранных частотах из списка частот, назначенного при планировании связи. При передаче данных по ДКМВ линии каждый частотный канал используется, например, по протоколу множественного доступа с временным разделением. Время доступа к частотному каналу разбито на кадры, каждый из которых в свою очередь поделен на интервалы (слоты). Используются короткие пакеты сообщений длительностью менее длительности слота. Передача НК 1 широковещательного маркера на каждой активной частоте имеет свое смещение относительно начала ведущего кадра, указанное в системной таблице.
Основное преимущество использования введенных на ПО узлов 25, 26, 21, 31, 32, 33 совместно с устройствами 19, 17, 16, 15, 14, 13, 12, 5, основанными на принципах интегрированной модульной авионики, представленных, например в [12-14] и методе программируемого радио, состоит в высшем уровне конфигурируемости и гибкости защиты от помех, предоставляемом архитектурой. Высший уровень конфигурируемости, реализуемый в предлагаемом оборудовании подвижного объекта - это полностью гибкие виды модуляции, протоколы уровня линии, сети, алгоритмы определения направления на источник помех и управления диаграммами направленности в четырех полусферах пространства и пользовательские функции, возможность изменения вида модуляции, ширины полосы сигнала и центральной частоты, диаграмм направленности узлов 17 по программе в широких пределах [9]. Благодаря заявленной системе появляется возможность создания (с помощью бортового вычислителя 5 и соответствующих модулей 15, 14 с широкодиапазонным радиочастотным приемо-передающим модулем 16) широкодиапазонного программируемого адаптивного комплекса связи нового типа, работающего совместно с радиофотонными узлами 20, 21, 22 и оптимально скомпонованными по четырем сторонам подвижного объекта бортовыми широкодиапазонными антеннами 17, формирующими круговую диаграмму направленности по азимуту, как в MB, так и в ДКМВ диапазонах. Модуль 15 физического уровня ПО содержит высокоскоростные с большим динамическим диапазоном АЦП и ЦАП и базируется на высокопроизводительных сигнальных процессорах, которые в цифровом виде реализуют большинство функций физического уровня, например, операции частотного преобразования, фильтрации, синтеза частот, приема радиосигналов. МФУ 15 предназначен для формирования и обработки радиосигналов на физическом уровне (кодирования/декодирования, перемежения/деперемежения, скремблирования/дескремблирования данных, модуляции/демодуляции, реализации адаптивных методов передачи и приема сигналов, полосовой фильтрации, преобразования частоты и т.п.). Модуль 14 канального уровня обеспечивает протоколы выбора частот связи, составления линии связи, обмена данными уровня линии и доступа к подсети «Воздух-Земля», обмена с модулем 13 маршрутизации ПО, обеспечения отказоустойчивого режима работы и другие процедуры. Модуль 13 маршрутизации обеспечивает распределение сообщений «Воздух-Земля» принятых по MB и ДКМВ каналам, например, в виде пакетов ISO 8208, конечным потребителям на борту и в обратном направлении. Модуль 12 интерфейсов обеспечивает все необходимые интерфейсы с бортовым оборудованием, например, по протоколам ARINC 429, ARINC 664, ARINC 646 и другим.
При работе в помеховой обстановке с помощью фазовращателей 19, управляемых бортовым вычислителем 5, в каждой из четырех полусфер пространства формируются несколько отдельных лучей узконаправленной (игольчатой) формы (при передаче данных через ретранслятора) и используются одновременно несколько частот в каждом луче в направлении абонентов: соответствующего НК 1 или выбранного подвижного объекта, с которыми предстоит провести сеанс связи. Далее в зависимости от местоположения абонента (наземного комплекса с известными координатами или полученной по радиоканалам «Земля-Воздух» или «Воздух-Воздух» информации о местоположении и параметрах движения соответствующего ПО) данный луч за счет подачи сигналов управления от бортового вычислителя 5 на фазовращатели 19 и узлы 26, 27 и 31, 37 в соответствующие бортовые широкодиапазонные антенны 17, размещенные со всех сторон по поверхности подвижного объекта, формируют главный лепесток диаграммы направленности в сторону абонента. Число узлов 16 и 17 в каждой полусфере пространства выбирается с учетом формирования требуемой формы диаграммы направленности в заданном секторе или с возможностью переброски лучей по азимуту на ретранслятор. Благодаря этому, появляются новые возможности системы радиосвязи и достигается сразу несколько преимуществ:
1. Появляется возможность увеличения дальности устойчивой связи за счет уменьшения потерь мощности радиосигналов в «длинных» бортовых антенно-фидерных трактах при введении узлов на радиофотонных элементах, управляемых с помощью бортового вычислителя, и распределения n бортовых широкодиапазонных антенн 17 и n бортовых широкодиапазонных радиочастотных приемо-передающих модулей 16 на четыре группы (полусферы пространства), каждая из которых формирует свою диаграмму направленности в соответствующей полусфере, сдвинутой относительно соседних на 90°, и формирования общей для двух полусфер диаграммы направленности для сосредоточения энергетического потенциала в выбранном направлении.
Это связано с тем, что за счет повышения коэффициента усиления антенн в направлении выбранного абонента требуется гораздо меньшая энергия на формирование и излучение радиосигналов в одном луче, так как обычная всенаправленная антенна излучает энергию в широком секторе.
2. Повышение помехозащищенности системы обеспечивается тем, что при наличии более двух последовательно соединенных узлов 16 и 17, и исключении искажений формы радиосигналов и их спектров при передаче по радиофотонным элементам появляется возможность автокомпенсации (сепарации) помех программными методами пространственно временной обработки сигналов за счет изменения формы диаграммы направленности в направлении на помехоноситель, а именно, уменьшения до нуля ее коэффициента усиления [15].
3. Отсутствуют потери связи из-за затенения бортовых антенн в направлении на вызываемого абонента металлическим планером воздушных объектов при крене и тангаже, так как бортовые широкодиапазонные антенны и бортовые широкодиапазонные радиочастотные приемо-передающие модули размещены по всем четырем сторонам подвижного объекта.
4. Учитывая широкополосность радиофотонных узлов 20, 21, 22, может быть расширен диапазон передаваемых радиосигналов, не только метрового и декаметрового диапазона, но и сантиметрового и миллиметрового, для чего можно изменить радиоэлектронную часть и конструкцию узлов 16 и 17 по аналогии с [16].
5. Концепция разделения аппаратуры синтезирования частот, формирования радиосигналов и приемо-передающих модулей, антенн позволяет снизить степень воздействия климатических условий, увеличить стабильность характеристик системы.
Узлы, каналы и шины 1-19, 23 одинаковые с прототипом. ШД А 17 и модули 16, 19, 20, 21, 22, 15, 14 совместно с бортовым вычислителем 5 интегрируют функции адаптивных радиостанций MB и ДКМВ диапазонов, аппаратуры передачи данных (кодека, модема) с программной реализацией режимов работы аппаратуры (видов модуляции, кодирования) с возможностью введения новых режимов работы модулей программным способом через шину 18, бортовой вычислитель 5 и соответствующие последовательно соединенные модули 12 и 13, входящие в вычислительный модуль 11 связи. Вычислительный модуль связи 11 (может быть выполнен, например, на микросхеме ADSP-21060), входящий в состав ПО, обеспечивает функциональное взаимодействие с бортовыми устройствами 5, 7, 8, 9, 10 и 15 и бортовыми датчиками 6 (событий). Устройства 20, 21, 22 и входящие в них узлы 24-37 могут быть выполнены на серийных образцах [5, 6, 16].
В качестве антенн 17 могут быть применены, например, легкие плоские ленточные антенны, наклеиваемые через диэлектрик на «заземленную» металлическую поверхность фюзеляжа или токопроводящую пластину, что позволит уменьшить число отводимых под антенны выступающих поверхностей на подвижном объекте, а, следовательно, улучшить его аэродинамические характеристики увеличить скорость и уменьшить расход горючего. Марка материалов лент и диэлектрика для антенн определяются волновым сопротивлением, диапазоном частот и другими требованиями [17, 18].
На момент подачи заявки разработаны алгоритмы функционирования и фрагменты программного обеспечения заявляемой системы радиосвязи.
Литература:
1. Патент РФ №44907.
2. Патент РФ №52290.
3. Патент РФ №68211.
4. Патент РФ №2518014 (прототип).
5. https://fpi.defence.ru/article/fpi-sozdaet-radiofotonnie-raclari-kotorie-smogut-obnaruzhit-bespilotniki/
6. М.Б Митяшев. К реализации технологий радиофотоники в АФАР радиолокационных комплексов. // Вестник СибГУТИ. 2015. №2. С. 178-190.
7. Д.С. Конторов, Ю.С. Голубев-Новожилов. Введение в радиолокационную системотехнику. - М.; Сов. Радио, 1971, 367 с.
8. Б.И. Кузьмин. «Сети и системы цифровой электросвязи», часть 1 «Концепция» ИКАО CNS/ATM. Москва Санкт-Петербург: ОАО «НИИЭР», 1999, 206 с.
9. А.В. Кейстович, В.Р. Милов. Виды радиодоступа в системах подвижной связи. Учебное пособие для вузов - М.: Горячая линия - Телеком, 2015. - 278 с.
10. GPS - глобальная система позиционирования. - М.: ПРИН, 1994, 76 с.
11. Руководство по ВЧ-линии передачи данных (Doc9741 - AN/962). Издание первое. - ICAO, 2000, 148 с.
12. RTCA/DO-297. Руководство по разработке ИМА и рассмотрение ее сертификации. 2005.
13. ARINC 651. Руководство по разработке интегрированной модульной авионики. 1991.
14. ARINC 653-1. Стандартные интерфейсы программного обеспечения приложений авионики. 2003.
15. С.А. Метелев, Ю.В. Шишкин. Принцип построения двухканального пространственного сепаратора сигнала и помехи с предварительным ортонормированием входных процессов // Изв. вузов. Радиофизика. - 2000. - Т. 43. - №2. - С. 130-143.
16. Белоусов А.А., Вольхин Ю.Н., Гамиловская А.В., Дубровская А.А., Тихонов Е.В. О применении методов и средств радиофотоники для обработки сигналов дециметрового, сантиметрового и миллиметрового диапазонов длин волн // Прикладная фотоника. 2014. №1. С. 65-86.
17. Патент РФ №2516868.
18. Патент РФ №2627686.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516868C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2014 |
|
RU2557801C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516686C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2022 |
|
RU2793106C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ С ПРИМЕНЕНИЕМ РАДИОФОТОННЫХ ЭЛЕМЕНТОВ | 2018 |
|
RU2692696C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2018 |
|
RU2688199C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2505929C1 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2572521C2 |
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2516704C2 |
Изобретение относится к системам обмена данными и может быть использовано для реализации информационного обмена по радиоканалам между наземными комплексами (НК) и источниками (получателями) информации, расположенными на воздушных подвижных объектах (ПО). Технический результат состоит в повышении помехозащищенности системы радиосвязи и увеличении дальности устойчивой связи за счет введения в бортовые антенно-фидерные тракты не искажающих фазочастотную и амплитудно-частотную характеристики узлов на радиофотонных элементах, управляемых с помощью бортового вычислителя и распределения n бортовых широкодиапазонных антенн, и n бортовых широкодиапазонных радиочастотных приемо-передающих модулей на четыре группы, каждая из которых формирует свою диаграмму направленности в соответствующей полусфере, сдвинутой относительно соседних на 90°. Для этого в систему радиосвязи с ПО с применением радиофотонных элементов дополнительно введены не искажающие форму и спектр радиосигналов узлы на радиофотонных элементах, которые управляются и контролируются с помощью двухсторонних связей, подключенных к соответствующим входам/выходам бортового вычислителя. 1 з.п. ф-лы, 2 ил.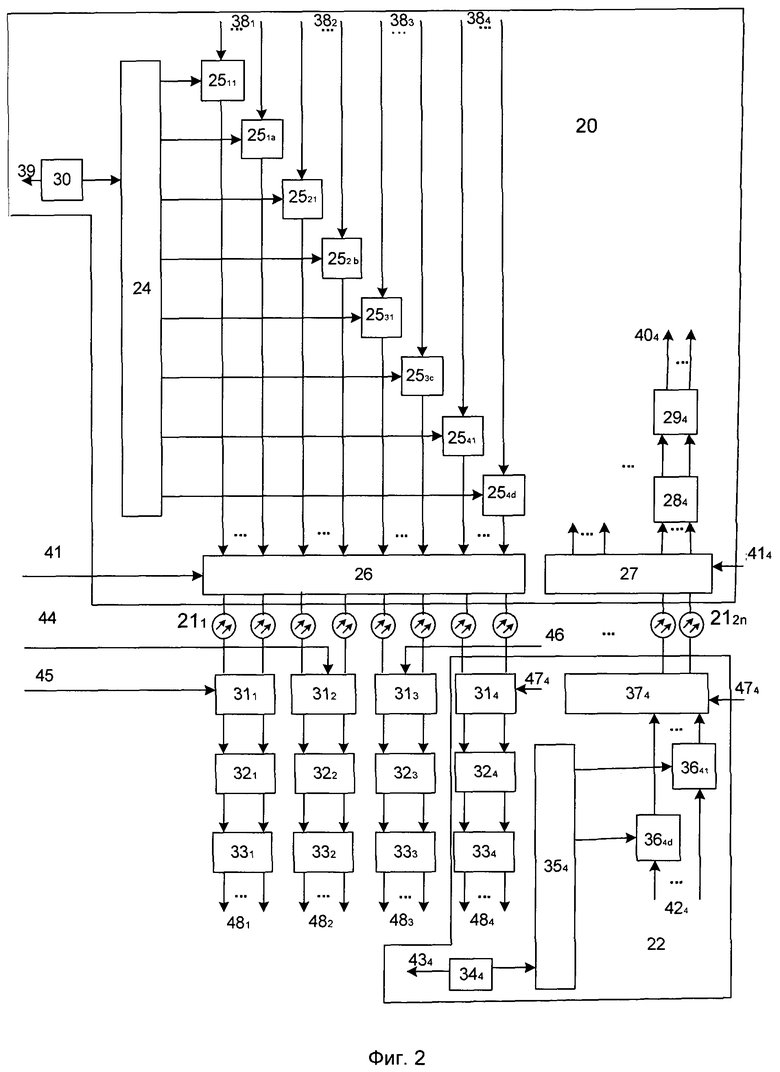
1. Система радиосвязи с подвижными объектами с применением радиофотонных элементов, состоящая из М территориально разнесенных наземных комплексов связи и N подвижных объектов, связанных между собой каналами связи «Воздух-Воздух» MB диапазона, а каналами радиосвязи «Воздух-Земля» MB и ДКМВ диапазонов с М наземными комплексами, которые соединены между собой и с внешними абонентами через наземную сеть передачи данных, при этом каждый подвижный объект содержит n бортовых широкодиапазонных антенн, n бортовых широкодиапазонных радиочастотных приемо-передающих модуля, модуль физического уровня, подключенный двухсторонними связями через последовательно соединенные модуль канального уровня, модуль маршрутизатора и модуль интерфейсов к бортовому вычислителю, имеющему двунаправленный интерфейс бортовой системы управления подвижным объектом, n фазовращателей, подключенных двухсторонними связями к n входам/выходам модуля физического уровня, при этом управляющие входы/выходы n фазовращателей подключены двухсторонними связями к соответствующим n входам/выходам бортового вычислителя, входы модуля интерфейсов подключены к бортовым датчикам, приемнику сигналов глобальной навигационной спутниковой системы, выход модуля интерфейсов подключен к блоку регистрации данных, второй вход/выход модуля интерфейсов подключен к бортовому анализатору типа принимаемых сообщений, третий вход/выход - к бортовому формирователю типа ретранслируемых сообщений, отличающаяся тем, что в нее введены оптический приемопередатчик, подключенный двухсторонними связями с одной стороны к входам/выходам n фазовращателей, а с другой стороны - к входам/выходам 2n волоконно-оптических линий связи, которые подключены двухсторонними связями соответственно к четырем групповым оптическим приемопередатчикам, входы/выходы которых через четыре группы n бортовых широкодиапазонных радиочастотных приемо-передающих модуля подключены к входам/выходам четырех групп n бортовых широкодиапазонных антенн, управляющие входы/выходы оптического приемопередатчика и четырех групповых n оптических приемопередатчиков подключены двухсторонними связями к соответствующим входам/выходам бортового вычислителя, при этом количество узлов n выбирается исходя из назначения системы.
2. Система радиосвязи с подвижными объектами с применением радиофотонных элементов по п. 1, отличающаяся тем, что в оптическом приемопередатчике излучение первого лазера через первый оптический разветвитель поступает на входы для несущей частоты n первых оптических модуляторов, на информационные входы которых подаются выходные сигналы n фазовращателей, а выходы первых оптических модуляторов подключены к соответствующим входам первого оптического коммутатора, выходы которого соединены с входами n первых ВОЛС, выходы n вторых ВОЛС через второй оптический коммутатор подключены к входам четырех параллельных ветвей оптического приемопередатчика, каждая из которых состоит из последовательно соединенных фотодетекторов i-й группы и фильтров нижних частот (ФНЧ) i-й группы, выходы ФНЧ i-й группы подключены к входам n фазовращателей, выходы n первых ВОЛС подключены к соответствующим входам четырех параллельных ветвей групповых оптических приемопередатчиков, каждая из которых состоит из последовательно соединенных оптических коммутаторов на прием i-й группы, фотодетекторов i-й группы, ФНЧ i-й группы, выходы ФНЧ групповых оптических приемопередатчиков подключены к соответствующим входам четырех групп n бортовых широкодиапазонных радиочастотных приемо-передающих модулей, выходы которых через соответствующие оптические модуляторы i-й группы каждого оптического приемопередатчика подключены к соответствующим входам оптического коммутатора на передачу i-й группы, выходы которого соединены с входами n вторых ВОЛС, излучение лазера i-й группы каждого оптического приемопередатчика через оптический разветвитель i-й группы поступает на входы для несущей частоты оптических модуляторов i-й группы, выходы контроля первого лазера и лазеров i-й группы подключены к соответствующим входам бортового вычислителя, сигналы управления первого и второго оптических коммутаторов, оптических коммутаторов на прием и на передачу i-й группы подключены к соответствующим управляющим выходам бортового вычислителя, при этом количество групп i равно четырем, общее количество узлов в четырех группах равно n, а количество узлов в каждой группе определяется назначением бортового комплекса связи.
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2012 |
|
RU2518014C2 |
| US 5669054 A, 16.09.1997 | |||
| СИСТЕМА РАДИОСВЯЗИ С ПОДВИЖНЫМИ ОБЪЕКТАМИ | 2005 |
|
RU2309543C2 |
| Электроконтактное приспособление к абразивно-доводочным станкам для автоматического контроля отверстий в процессе обработки | 1951 |
|
SU94101A1 |

