Изобретение относится к области машиностроения и, в частности, к способам балансировки ветроколес вертикально-осевых ветроэнергетических установок.
Известен способ балансировки сборных роторов, описанный в ГОСТ ИСО 11342-95, при котором балансируют вал, последовательно балансируют ротор после установки на вал очередного элемента.
Недостатком известного способа является то, что после установки сборного ротора (трансмиссии) на агрегат его (ее) вращение осуществляется с некоторым эксцентриситетом относительно той оси, по которой осуществлялась балансировка. Эксцентриситет обусловлен допуском точности на обработку монтажных поверхностей, определяющим точность монтажа.
Из уровня техники известны запатентованные способы, решающие проблему балансировки сборных роторов.
Известен способ [1] балансировки сборного ротора, который заключается в том, что балансируют вал и последовательно балансируют после установки на вал очередного элемента ротора. При этом отбалансированный ротор крепят к фланцам валов двигателя и компрессора и производят корректировку монтажного дисбаланса, для чего измеряют величины максимального радиального биения балансировочных поверхностей ротора. Отмечают места нулевого радиального биения балансировочных поверхностей ротора. На поверхностях ротора в плоскостях коррекции устанавливают грузики со стороны нулевого радиального биения балансировочных поверхностей. Массы корректирующих грузиков определяются по формуле в зависимости от массы частей сборного ротора, корректируемых в данных плоскостях, величины биения ближайшей к плоскости коррекции балансировочной поверхности, радиуса установки грузика.
Известен также способ [2] балансировки сборных роторов, заключающийся в том, что балансируют вал и последовательно, после установки на вал очередного элемента, балансируют собираемый ротор. При этом на вал устанавливают магнитные сердечники. Измеряют относительно их поверхностей величину максимального радиального биения и маркируют места максимального радиального биения всех посадочных поверхностей, предназначенных для установки элементов ротора. Снимают сердечники. Устанавливают вал балансировочными поверхностями на опоры балансировочного станка. На поверхностях, находящихся в плоскостях коррекции дисбаланса элементов ротора, закрепляют имитационные грузики со стороны максимального радиального биения. После окончания балансировки ротора грузики снимают. Массы имитационных грузиков определяют по формуле в зависимости от массы устанавливаемых на вал элементов сборного ротора, величины биения посадочной поверхности, количества плоскостей коррекции дисбаланса устанавливаемого элемента и радиуса установки грузика.
Недостатком указанных выше способов является то, что они не могут быть использованы при балансировке крупногабаритных пространственных конструкций, которые не вписываются в присоединительные размеры существующих балансировочных станков.
Несмотря на недостатки, техническое решение [2] может быть принято в качестве прототипа, как наиболее близкий аналог.
Задачей предлагаемого изобретения является создание способа, обеспечивающего получение технического результата, заключающегося в том, что балансировка ротора ветроколеса производится без использования балансировочного станка на собственной (штатной) опоре и при отсутствии трения покоя.
Этот технический результат достигается тем, что балансировку ветроколеса ветрикально-осевой ветроэнергетической установки, состоящего из ступицы и кольца с закрепленными на нем в два яруса лопастями, проводят в следующей последовательности: комплектуют лопасти ветроколеса так, чтобы значения массы лопастей в каждом ярусе отличались между собой не более 0,15%, ступице придают горизонтальное положение относительно оси вращения, к оси ступицы присоединяют технологические штанги, полученную сборку поднимают и устанавливают штангами на подставки, на ступице устанавливают кольцо крепления лопастей, на ось ступицы устанавливают виброгенератор и при работающем виброгенераторе подбором по массе и установкой грузов балансировку производят в три этапа, вначале балансируют с кольцом, затем - с присоединенными лопастями верхнего яруса, а затем - с присоединенными лопастями нижнего яруса так, чтобы на каждом этапе при придании вращения «от руки» сборка могла останавливаться в любом положении от 0 до 360°, при этом каждый этап балансировки заканчивается установкой и закреплением балансировочного груза в определенном месте.
Предложенный способ позволяет балансировать сборные роторы значительных габаритов, производить балансировку без использования специального балансировочного станка на собственной (штатной) опоре и при отсутствии трения покоя, способ отличается от известных точностью и простотой реализации.
Сущность предлагаемого способа поясняется графическими материалами, где
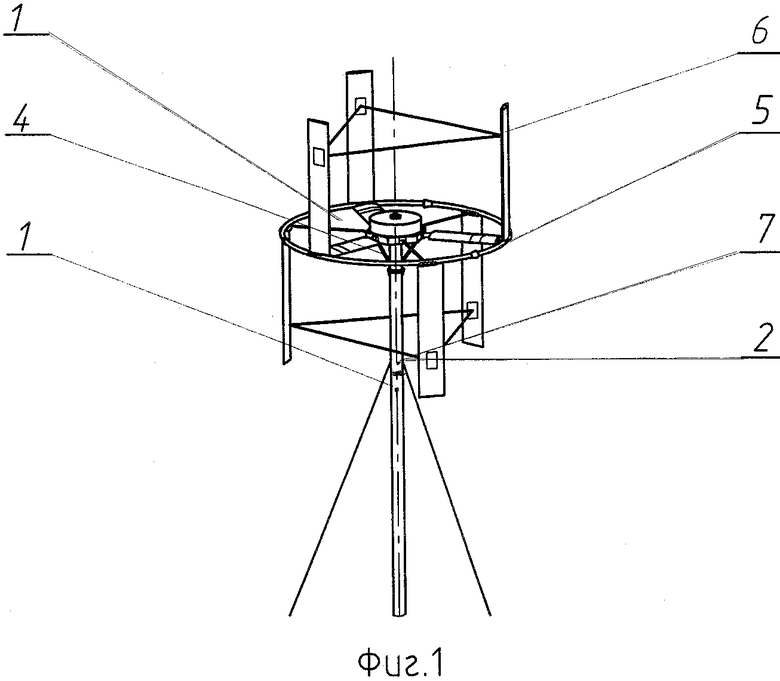
- на Фиг.1 изображен в изометрической проекции общий вид вертикально-осевой ветроэнергетической установки с ветроколесом, содержащим аэродинамические лопасти, установленные в двух ярусах;
- на Фиг.2 показана ступица с кольцом и технологическими штангами, установленными на подставках;
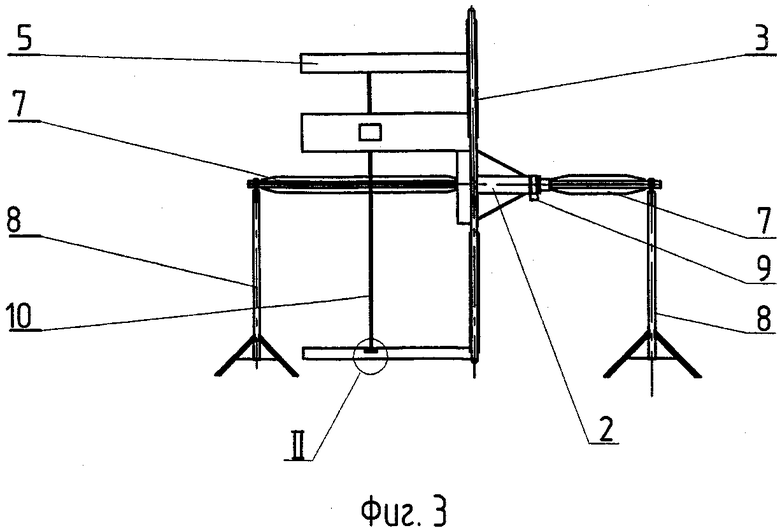
- на Фиг.3 показана ступица с кольцом, смонтированными лопастями верхнего яруса и технологическим штангами, установленными на подставках;
- на Фиг.4 показана ступица с кольцом, смонтированными лопастями верхнего и нижнего ярусов и технологическими штангами, установленными на подставках;
- на Фиг.5 показан выносной элемент I на Фиг.2 (крепление балансировочного груза на кольце);
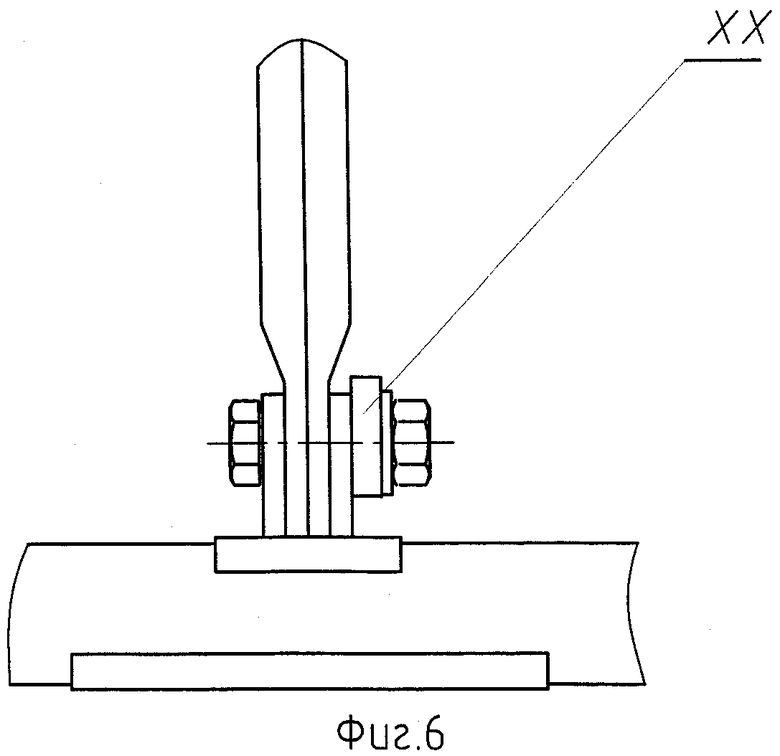
- на Фиг.6 показан выносной элемент II на Фиг.3 и 4 (крепление балансировочных грузов на лопастях соответственно верхнего и нижнего ярусов).
Способ балансировки ветроколеса ветрикально-осевой ветроэнергетической установки (Фиг.1), содержащей мачту 1 с оттяжками, закрепленное на ступице 2 кольцо 3 с установленными на нем в два яруса лопастями 4 и 5, осуществляется в следующей последовательности. Сначала комплектуют лопасти ярусов ветроэнергетической установки так, чтобы значения массы лопастей в каждом ярусе отличались между собой не более 0,15%.
Затем ступице 2 придают горизонтальное положение (Фиг.2) и производят балансировку в три этапа.
На первом этапе балансировки к оси 6 ступицы 2 присоединяют технологические штанги 7. Полученную сборку устанавливают штангами 7 на подставки 8. На ступице 2 закрепляют кольцо 3. На оси 6 ступицы 2 устанавливают и закрепляют виброгенератор 9 (для устранения трения покоя в подшипнтках). При включенном виброгенераторе 9 балансируют сборку так, чтобы при вращении «от руки» она могла остановиться в любом положении от 0° до 360°. Это достигается следующим образом. Кольцо 3 со ступицей 2 приводится во вращение «от руки» так, чтобы они совершили не менее одного полного оборота вокруг оси. Прежде чем остановиться, они сделают несколько затухающих колебаний по принципу маятника. При этом центр масс балансируемой сборки - кольцо 3 со ступицей 2 - встанет в общей вертикальной плоскости с их осью вращения в виду отсутствия трения покоя в подшипниках из-за работающего виброгенератора 9.
После остановки сборки на кольце 3 в самой нижней его точке делается метка. Кольцо 3 поворачивают ровно на 90° (так, чтобы метка встала в общей горизонтальной плоскости с осью вращения сборки). Динамометром с погрешностью измерения не более 5 грамм замеряют величину силы, которой сборка стремится возвратиться в исходное состояние. Величина этой силы и есть та неуравновешенная масса (груз 11), которую следует установить на кольце 3 (Фиг.5) на противоположной от метки стороне.
На втором этапе балансировки (Фиг.3) на кольце 3 устанавливают лопасти 5 верхнего яруса с растяжками 10. При работающем виброгенераторе 9 балансируют сборку так, чтобы при вращении «от руки» она могла остановиться в любом положении от 0° до 360°. Грузы 12 (Фиг.6) уставливаюся в узлах крепления растяжек 10 к лопастям 5.
На третьем этапе балансиповки (Фиг.4) на кольце 3 устанавливают лопасти 4 нижнего яруса с растяжками 10 и повторяют операции, проведенные после установки на кольце 3 лопастей 5 верхнего яруса.
На этом балансировка ветроколеса вертикально-осевой ветроэнергетической установки заканчивается.
Источники информации
1. Патент RU 2372594. Способ балансировки сборного ротора, кл. МПК F04D 29/66, G01M 1/32 (2006.01). Приоритет от 10.04.2008 г.
2. Патент RU 2372595. Способ балансировки сборного ротора, кл. МПК F04D 29/66 (2006.01). Приоритет от 24.04.2008 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОР ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2010 |
|
RU2446311C2 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2013 |
|
RU2554666C2 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372595C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372594C1 |
| РАСЧЕТНО-ИМИТАЦИОННЫЙ СПОСОБ БАЛАНСИРОВКИ ВАЛА | 2010 |
|
RU2426014C1 |
| СПОСОБ ПРЕДВАРИТЕЛЬНОЙ БАЛАНСИРОВКИ ЭЛЕМЕНТА СБОРНОГО РОТОРА НА ОПРАВКЕ | 2010 |
|
RU2431064C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2014 |
|
RU2554669C1 |
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2013 |
|
RU2531158C1 |
| СПОСОБ СБОРКИ РОТОРА | 2019 |
|
RU2731506C1 |



Изобретение относится к способам балансировки ветроколес вертикально-осевых ветроэнергетических установок.
Способ балансировки ветроколеса ветрикально-осевой ветроэнергетической установки, состоящего из ступицы и кольца с закрепленными на нем в два яруса лопастями, характеризуется тем, что балансировку проводят в следующей последовательности: комплектуют лопасти ветроколеса так, чтобы значения массы лопастей в каждом ярусе отличались между собой не более 0,15%, ступице придают горизонтальное положение относительно оси вращения, к оси ступицы присоединяют технологические штанги, полученную сборку поднимают и устанавливают штангами на подставки, на ступице устанавливают кольцо крепления лопастей, на ось ступицы устанавливают виброгенератор и при работающем виброгенераторе подбором по массе и установкой грузов балансировку производят в три этапа, вначале балансируют с кольцом крепления лопастей, затем - с присоединенными лопастями верхнего яруса, а затем - с присоединенными лопастями нижнего яруса так, чтобы на каждом этапе при придании вращения «от руки» сборка могла останавливаться в любом положении от 0 до 360°, при этом каждый этап балансировки заканчивается установкой и закреплением балансировочных грузов определенного веса и в нужном месте. Патентуемый способ балансировки ветроколеса производится без использования балансировочного станка на собственной (штатной) подшипниковой опоре и при отсутствии трения покоя.
Изобретение позволяет балансировать ветроколеса без использования балансировочного станка. 6 ил.
Способ балансировки ветроколеса ветрикально-осевой ветроэнергетической установки, состоящего из ступицы и кольца с закрепленными на нем в два яруса лопастями, характеризующийся тем, что балансировку проводят в следующей последовательности: комплектуют лопасти ветроколеса так, чтобы значения массы лопастей в каждом ярусе отличались между собой не более 0,15%, ступице придают горизонтальное положение относительно оси вращения, к оси ступицы присоединяют технологические штанги, полученную сборку поднимают и устанавливают штангами на подставки, на ступице устанавливают кольцо крепления лопастей, на ось ступицы устанавливают виброгенератор и при работающем виброгенераторе подбором по массе и установкой грузов балансировку производят в три этапа, вначале балансируют с кольцом, затем - с присоединенными лопастями верхнего яруса, а затем - с присоединенными лопастями нижнего яруса так, чтобы на каждом этапе при придании вращения «от руки» сборка могла останавливаться в любом положении от 0 до 360°, при этом каждый этап балансировки заканчивается установкой и закреплением балансировочного груза в определенном месте.
| Прибор для наблюдения за обжигом кирпича | 1923 |
|
SU11342A1 |
| Методы и критерии балансировки гибких роторов | |||
| СПОСОБ БАЛАНСИРОВКИ СБОРНОГО РОТОРА | 2008 |
|
RU2372595C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 1998 |
|
RU2190128C2 |
| US 2009151450 A1, 18.06.2009 | |||
| WO 2011032606 A1, 24.03.2011. | |||

