ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к аналого-цифровой измерительной технике для измерения аналогового сигнала и может быть использовано в любых устройствах, где требуется высокая точность измерения аналогового сигнала, содержащего погрешности в виде линейного смещения и колебаний показаний, вносимые измерительной системой и внешними шумами.
УРОВЕНЬ ТЕХНИКИ
Известны схемы преобразования аналогового сигнала в цифровой с использованием АЦП и различных схем уменьшения погрешностей в виде линейного смещения и колебаний показаний, вносимых измерительной системой и внешними шумами. Например, известен интегрирующий АЦП (авт. св. SU №1211886), содержащий управляющее устройство и логическую схему и выполненный с возможностью повышения точности аналого-цифрового преобразования. Недостатком известного устройства является низкое быстродействие АЦП. Наиболее близким аналогом настоящего изобретения является АЦП с периодической подстройкой постоянной составляющей, известный из патента RU №2198463. Данное устройство содержит собственно АЦП, управляющие средства, выполненные с возможностью уменьшения погрешности в виде линейного смещения путем компенсации этого линейного смещения, и усредняющие средства, выполненные с возможностью уменьшения погрешности в виде колебаний показаний путем усреднения показаний за время усреднения. В качестве технического результата указанное устройство обеспечивает повышение точности подстройки постоянной составляющей за счет исключения влияния на результаты аналого-цифрового преобразования возникающих погрешностей. Недостатком известного устройства является отсутствие возможности сохранения динамических характеристик измерения в случае измерения быстроизменяющегося сигнала, другими словами, известное из RU №2198463 устройство в случае быстроизменяющегося сигнала неспособно обеспечить необходимую точность измерения. В ряде случаев, в частности в управляющих и регулирующих системах требуется обеспечение высокой точности измерения аналогового сигнала в режимах регулирования наряду с сохранением динамики измерения сигнала в случае измерения быстроизменяющегося сигнала, например при управлении в аварийных режимах. Такие требования существуют, например, в управляющих системах для управления электрогидравлическими системами автоматического регулирования и защиты (САРЗ), предназначенных, в частности, для управления турбинами или турбогенераторами. Регулирование работы турбины в электрогидравлических системах осуществляется посредством регулирования положения отсечного золотника (ОЗ), перемещающего шток главного сервомотора (ГСМ), который в свою очередь управляет регулирующими клапанами, т.е. подачей пара на турбину. Применяемые способы регулирования положения отсечного золотника предполагают нахождение отсечного золотника в определенном однозначном положении, соответствующем установившемуся положению сервомотора. Однако для паровых турбин с высоконагруженными сервомоторами это не соответствует действительности. Под действием многочисленных, зачастую не поддающихся прогнозированию факторов, таких как температура, завоздушенность, давление масла, износ трущихся деталей и др., нулевое положение отсечного золотника изменяется, что приводит к пульсациям сервомотора и снижению вследствие этого точности установки положения регулирующих клапанов, а также снижению ресурса. При использовании аналогового сигнала для управления положением ОЗ необходима повышенная точность измерения задающего сигнала, обеспечивающая возможность управления положением ОЗ с точностью до 10 мкм. Поэтому существует потребность повышения указанной точности измерения при сохранении динамических характеристик измерения в случае измерения быстроизменяющегося сигнала.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание способа повышения точности измерения аналогового сигнала, обеспечивающего сохранение динамических характеристик измерения в случае измерения быстроизменяющегося сигнала. Также задачей настоящего изобретения является создание устройства для измерения аналогового сигнала, обеспечивающего повышения точности измерения аналогового сигнала с сохранением динамических характеристик измерения в случае измерения быстроизменяющегося сигнала.
Для решения задачи повышения точности измерения аналогового сигнала заявителем предложен способ повышения точности измерения аналогового сигнала, содержащего погрешности в виде линейного смещения и колебаний показаний, согласно которому указанное измерение выполняют с использованием АЦП. Согласно указанному способу погрешность в виде указанного линейного смещения показаний уменьшают с помощью управляющих средств путем компенсации этого линейного смещения, а погрешность в виде указанных колебаний показаний уменьшают с помощью усредняющих средств путем усреднения показаний за время усреднения. При этом с помощью управляющих средств сравнивают скорость изменения аналогового сигнала с предварительно установленным пороговым значением. Указанное усреднение показаний выполняют динамически путем изменения с помощью управляющих средств времени усреднения от нуля до предварительно установленного максимального значения в случае начала изменения аналогового сигнала со скоростью, меньшей предварительно установленного порогового значения, и путем отключения указанного усреднения показаний с помощью управляющих средств в случае превышения указанной скоростью предварительно установленного порогового значения.
Техническим результатом изобретения является повышение точности измерения аналогового сигнала за счет сохранения динамических характеристик измерения в случае обработки быстроизменяющегося сигнала и за счет обеспечения динамического повышения точности измерения указанного аналогового сигнала в случае начала его изменения со скоростью, меньшей предварительно установленного порогового значения.
Требование сохранения динамических характеристик в случае обработки быстроизменяющегося сигнала актуально при использовании изобретения в составе регулирующих систем, в частности в области энергетики в электрогидравлических системах регулирования турбин.
Согласно одному из вариантов реализации изобретения, измерение аналогового сигнала производят в заранее известном диапазоне измерений.
Согласно одному из вариантов реализации изобретения, предложено устройство для измерения аналогового сигнала, содержащее АЦП, управляющие средства, выполненные с возможностью уменьшения погрешности в виде линейного смещения путем компенсации этого линейного смещения, и усредняющие средства, выполненные с возможностью уменьшения погрешности в виде колебаний показаний путем усреднения показаний за время усреднения. При этом управляющие средства дополнительно выполнены с возможностью сравнения скорости изменения аналогового сигнала с предварительно установленным пороговым значением, с возможностью изменения времени усреднения от нуля до предварительно установленного максимального значения в случае начала изменения аналогового сигнала со скоростью меньшей, предварительно установленного порогового значения, и с возможностью отключения указанного усреднения показаний в случае превышения указанной скоростью предварительно установленного порогового значения с обеспечением динамического усреднения показаний.
Согласно одному из вариантов реализации изобретения, предложено устройство для измерения аналогового сигнала, выполненное с возможностью использования в составе электрогидравлической системы управления и регулирования турбин.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖА
Ниже приведено описание предпочтительного варианта реализации настоящего изобретения со ссылками на прилагаемый чертеж.
Фиг.1 иллюстрирует зависимость скорости главного сервомотора от смещения отсечного золотника из положения отсечки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Ниже со ссылками на сопроводительный чертеж описан предпочтительный вариант реализации настоящего изобретения.
Способ повышения точности измерения аналогового сигнала, обеспечивающий сохранение динамических характеристик измерения, и соответствующее устройство, реализующее данный способ, могут применяться в составе систем автоматического регулирования и защиты (САРЗ), предназначенных для управления паровыми или газовыми турбинами или турбогенераторами. В соответствии с одним из вариантов реализации, САРЗ состоит из электрогидравлической системы регулирования (ЭГСР) и электронного автомата безопасности. ЭГСР предназначена для управления технологическими режимами работы турбины; контроля состояния технических средств турбины, включая САРЗ; автоматического регулирования параметров турбины с определенным и постоянным качеством рабочих характеристик в технологических режимах ее работы; защиты турбины и ее оборудования от превышения допустимых значений частоты вращения ротора в процессе реализации технологических процессов.
Исполнительными органами САРЗ являются отсечной золотник (ОЗ) и главный сервомотор (ГСМ), управляемый отсечным золотником. Все функции управления турбиной реализуются за счет регулируемого изменения положения главных сервомоторов. Важнейшим компонентом исполнительной части САРЗ является следящий привод отсечного золотника (СПОЗ). СПОЗ устанавливают непосредственно на отсечные золотники главных сервомоторов системы регулирования. СПОЗ в данном варианте реализации представляет собой быстродействующую следящую систему, которая автоматически выставляет текущее положение ОЗ в заданное положение относительно положения отсечки с точностью не хуже 0,05 мм и усилием не менее 5000 Н. Сигналы заданного положения ОЗ, подаваемые на вход СПОЗ, формируются в электрической части САРЗ. СПОЗ состоит из шкафа следящего привода и электромеханического преобразователя (ЭМП). Положение отсечного золотника, соответствующее состоянию отсечки, «плавает» в пределах 1 мм в зависимости от паровой нагрузки, износа деталей и т.п. Фактическое положение ОЗ в состоянии отсечки автоматически запоминается в СПОЗ каждый раз в момент страгивания ГСМ при выходе контура регулирования положения ГСМ из равновесного состояния. При скачкообразном изменении сигнала СПОЗ отрабатывает изменение задания за 0,2 с, практически независимо от величины скачка задания. Форсированный сигнал используется в режиме сброса нагрузки по сигналу отключения выключателя генератора с восстановлением частоты вращения турбины 3000 об/мин. При плановом останове турбины по команде управления с закрытием регулирующих клапанов (РК) без закрытия стопорных заслонок рекомендуется установка положения ОЗ в положение - минус 1,2 мм в сторону закрытия ГСМ.
Изменение положения поршня главного сервомотора происходит за счет подачи силового масла через отсечной золотник в полости под или над поршнем. При этом другая полость соединена с дренажем. В положении отсечки (ПО) рабочие бочки отсечного золотника (верхняя и нижняя) перекрывают окна в буксе, через которые силовое масло подводится к главному сервомотору. Если ОЗ находится в положении отсечки, ГСМ не перемещается. При смещении ОЗ от положения отсечки вверх (вниз) изменяется зазор между бочкой золотника и буксой и силовое масло начинает поступать в верхнюю (нижнюю) полость гидроцилиндра ГСМ с обеспечением перемещения поршня. Скорость перемещения главного сервомотора определяется величиной смещения отсечного золотника (ОЗ) от положения отсечки (ПО).
На Фиг.1 приведена зависимость скорости перемещения ГСМ от величины смещения ОЗ от ПО. Скорость перемещения ГСМ выражается в долях полного хода ГСМ (320 мм) в секунду (1/с). При отклонении ОЗ от ПО в пределах ±0,7 мм скорость ГСМ линейно изменяется в пределах ±0,01 1/с. При отклонении ОЗ от ПО в пределах от ±0,7 мм до ±3 мм скорость ГСМ линейно изменяется в пределах от ±0,01 до ±0,1 1/с. При смещении ОЗ более чем на ±3 мм наклон зависимости «смещение ОЗ от ПО - скорость ГСМ» увеличивается до 0,2 1/с на 1 мм хода ОЗ.
Ограничение перемещения ОЗ средствами СПОЗ реализовано через ограничение диапазона изменения задания положения на входе СПОЗ от -12 мм до 4 мм. При выходе ОЗ на верхнее ограничение 4 мм скорость перемещения поршня ГСМ вверх равна 0,2 1/с. При смещении ОЗ вниз от ПО на 12 мм скорость перемещения поршня ГСМ вниз равна 2 1/с.
Кроме того, положение отсечки (нулевая скорость ГСМ) и ее зона смещается в зависимости от положения ГСМ и в процессе эксплуатации. Зона положения отсечки может изменяться от 10 мкм до 200 мкм.
При использовании аналогового сигнала для установки положения ОЗ необходима повышенная точность измерения задающего сигнала - до 10 мкм. Получение такой точности возможно с использованием способа и устройства по настоящему изобретению.
Точность измерения задания до 10 мкм в совокупности с алгоритмом автоподстройки нуля ОЗ, например в соответствии с евразийским патентом №13903 «Способ регулирования положения отсечного золотника с динамической коррекцией положения «нуля», применяемый в системе регулирования паровой турбины», позволяет избавиться от пульсаций органов парораспределения, повысить качество поддержания технологических параметров (частоты вращения, положения клапанов, электрической мощности, давления пара), а также повысить ресурс органов парораспределения и ресурс оборудования, что позволяет увеличить межремонтные периоды и, соответственно, увеличить выработку электроэнергии.
В соответствии с данным вариантом реализации изобретения, обеспечено динамическое усреднение (фильтрация) в зависимости от скорости изменения аналогового сигнала. При малой скорости изменения сигнала (пологий участок на Фиг.1, в окрестности ПО) наиболее важно обеспечивать необходимую степень фильтрации (усреднения) сигнала, в то время как при быстром изменении сигнала наиболее важно обеспечить сохранение динамики измерения, что, в свою очередь, позволяет обеспечить большую точность измерения относительно средств измерения, не обладающих достаточным быстродействием, чтобы обеспечить необходимую динамику измерения.
В соответствии с одним из вариантов реализации данного изобретения, измерение аналогового сигнала производят с помощью устройства, содержащего АЦП, усредняющие средства, выполненные с возможностью уменьшения погрешности в виде колебаний показаний путем усреднения показаний за время усреднения (фильтрации указанного аналогового сигнала), и управляющие средства, выполненные с возможностью уменьшения погрешности в виде линейного смещения путем компенсации этого линейного смещения, с возможностью измерения скорости изменения аналогового сигнала и с возможностью управления указанными усредняющими средствами. Это управление, в частности, включает управление размерностью массива измерений усредняющих средств. Управляющие средства и усредняющие средства по данному изобретению выполнены с использованием по меньшей мере одного контроллера. Усредняющие средства дополнительно содержат по меньшей мере одни запоминающие средства для хранения массива измерений аналогового сигнала. АЦП в данном варианте реализации изобретения имеет разрядность 16 бит.
При различных способах измерения аналогового сигнала присутствует влияние линий связи (например, сопротивления проводов) на измеряемый результат, что можно учесть, введя линейную поправку. В устройстве по настоящему изобретению компенсацию погрешности в виде линейного смещения устраняют при помощи управляющих средств, измеряя аналоговый сигнал на границах заранее известного диапазона измерения и на основании полученных измерений вводя линейную поправку. Кроме того, на измеряемый сигнал оказывают влияния различные типы шумов, которые вызваны наводками и особенностями работы выдающего и измеряемого оборудования. В основном данные шумы имеют нормальное гауссовское распределение и для их фильтрации в устройстве по настоящему изобретению используется способ усреднения измеряемых параметров за время усреднения. Для этого контроллер усредняющих средств при помощи запоминающих средств производит запоминание значений аналогового сигнала за предварительно выбранное время усреднения с последующим усреднением этого аналогового сигнала.
В устройстве по данному изобретению измеряемый аналоговый сигнал поступает на вход АЦП, который преобразует его в цифровой вид, с выхода АЦП сигнал в цифровом виде поступает на управляющие средства, которые производят компенсацию линейного смещения и производят измерение скорости изменения сигнала. С выхода управляющих средств сигнал в цифровом виде поступает на усредняющие средства. Управляющие средства определяют скорость изменения сигнала и на основании этого управляют размерностью массива измерений усредняющих средств. Массив измерений содержит измеренные значения аналогового сигнала, используемые при усреднении. В случае, если скорость изменения сигнала превышает предварительно установленное пороговое значение, управляющие средства устанавливают размерность массива измерений усредняющих средств в ноль (отсутствие фильтрации) относительно предыдущей величины измеряемого параметра и тем самым отключают указанное усреднение. Отключение фильтра производят при условии, если скорость изменения сигнала за один цикл работы контроллера управляющих средств превышает предварительно установленное пороговое значение, равное, к примеру, удвоенной амплитуде шума. Так, если амплитуда шума составляет 0,4% амплитуды сигнала, предварительно установленное пороговое значение скорости изменения сигнала составляет 0,4% амплитуды сигнала за цикл. В случае, если скорость изменения сигнала становится меньше предварительно установленного порогового значения, управляющие средства динамически увеличивают размерность массива измерений усредняющих средств и, соответственно, обеспечивают равномерное отсечение сначала высокочастотных помех, а затем по мере увеличения размерности массива и низкочастотных помех. Таким образом, в данном варианте реализации изобретения обеспечивается динамическое изменение качества фильтрации (усреднения) в зависимости от скорости изменения аналогового сигнала.
Указанные управляющие и усредняющие средства могут быть реализованы как на одном контроллере, так и на различных контроллерах или других устройствах, обеспечивающих выполнение указанных функций.
Указанный способ повышения точности измерения аналогового сигнала, реализованный с помощью устройства по одному из вариантов реализации изобретения, может быть проиллюстрирован на следующем примере:
1. На вход устройства для измерения аналогового сигнала по настоящему изобретению подают сигнал в диапазоне 4..20 мА.
2. Для измерения сигнала с точностью 0,001 мА используют АЦП с разрядностью 16 бит.
3. При задании 4 мА на входе устройства среднее значение, получаемое в результате измерения на выходе АЦП - 4,00 мА, минимальное - 3,97 мА, а максимальное - 4,034 мА.
4. При задании 20 мА на входе устройства среднее значение, получаемое в результате измерения на выходе АЦП - 20,016 мА, минимальное значение - 19,98 мА, а максимальное - 20,05 мА.
5. На основании результатов п.3, 4 можно сделать вывод, что в диапазоне 4..20 мА присутствуют линейное смещение показаний 0,016 мА и колебания показаний около ±0,03 мА, что соответствует смещению 0,1% и колебаниям в пределах 0,19% от полного диапазона.
6. Для компенсации смещения вводят пропорциональный коэффициент, учитывающий линейное смещение, с максимальный значением 0,016 мА и минимальным 0 мА.
7. Для повышения точности и уменьшения амплитуды колебаний входного сигнала введен фильтр (усредняющие средства), принцип действия которых основан на усреднении массива измерений за определенное время усреднения, величина которого соответствует размерности обрабатываемого массива. Текущее время усреднения определяют как произведение текущей размерности массива на длительность цикла контроллера усредняющих средств, равного 5 мс. Переменное время усреднения обеспечивает динамическое усреднение аналогового сигнала в зависимости от скорости его изменения.
8. Размерность массива является динамической величиной, минимальное значение 0 соответствует отключенному фильтру. При превышении скоростью изменения сигнала некоторого предварительно определенного порогового значения фильтр отключается, при входе в рабочий интервал изменения скорости размерность массива начинает увеличиваться до максимального значения фильтрации (максимальная размерность массива 100). С учетом того, что цикл контроллера 5 мс, цикл фильтрации в установившемся режиме соответствует 500 мс. Динамическая фильтрация введена для сохранения быстродействия отработки форсированного сигнала.
9. С учетом введения коэффициента пропорционального смещения и фильтрации входного сигнала получены следующие результаты:
- При задании 4 мА среднее значение 4,00 мА, минимальное 3,9993 мА и максимальное 4,0007 мА.
- При задании 20 мА на входе среднее значение 20,00 мА, при этом минимальное значение 19,9994 мА и максимальное 20,0006 мА.
- В процессе измерения промежуточных значений в диапазоне 4..20 мА, максимальная амплитуда колебаний значений в установившемся режиме не более 0,001 мА, что соответствует 0,006% от полного диапазона.
Таким образом, при использовании аналогового сигнала в качестве задатчика для установки положения ЭМП при рабочем ходе 20 мм (4..20 мА), используя вышеперечисленные способы повышения точности, возможно повысить точность измерения задания до 5 мкм.
Указанный способ повышения точности измерения аналогового сигнала может быть проиллюстрирован также следующим алгоритмом.
(*Компенсация пропорционального смещения сигнала*)
in1:=AnalogInR.Value-shift_a*(AnalogINR.Value/20.0);
(*Сброс фильтрации*)
if re(ini) or dtype_dtype_prev or (abs(in1-mass[0])>filt_d) then
inc_t:=0;
temp1:=0.0;
end_if;
(*Алгоритм фильтрации сигнала*)
if re(t_10ms) then
inc(inc_t);
if inc_t>=size_p then inc_t:=size_p; end_if;
mass[0]:=in1;
temp1:=0.0;
for ii:=0 to inc_t-1 do
temp1:=temp1+mass[ii];
end_for;
ROL_ARREAL(1, mass);
mass[0]:=in1;
out:=temp1/int_to_real(inc_t);
end_if;
dtype_prev:=dtype.
В соответствии еще с одним вариантом реализации изобретения аналогичный способ использован в другом устройстве в составе САРЗ для повышения точности измерения частоты вращения ротора турбины. При этом точность измерения частоты вращения после обработки получилась 0,01 об/мин относительно номинальной частоты 3000 об/мин, что составляет 0,0003%
Таким образом, вышеуказанный способ и соответствующие реализующие этот способ устройства возможно применять в любой области техники, где требуется повышение точности измерения сигнала без потери динамики измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления сервомотором рабочего колеса поворотно-лопастной турбины | 2014 |
|
RU2614232C2 |
| Устройство для воспроизведения аналогового сигнала | 1988 |
|
SU1524175A1 |
| УСТРОЙСТВО ДЛЯ АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ ИЗМЕРЕННОГО НАПРЯЖЕНИЯ | 2005 |
|
RU2324286C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2006886C1 |
| Способ измерения аналогового сигнала | 1990 |
|
SU1725145A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОЧНОСТИ СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1999 |
|
RU2170920C2 |
| Способ регулирования паровой турбины | 1991 |
|
SU1815338A1 |
| ПРЕОБРАЗОВАТЕЛЬ СРЕДНЕКВАДРАТИЧЕСКОГО ЗНАЧЕНИЯ НАПРЯЖЕНИЯ | 2001 |
|
RU2210782C2 |
| Цифровой измеритель действующего значения сигнала | 2018 |
|
RU2685062C1 |
| АЦП С ПЕРИОДИЧЕСКОЙ ПОДСТРОЙКОЙ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ | 2001 |
|
RU2198463C1 |
Изобретение относится к аналого-цифровой измерительной технике для измерения аналогового сигнала. Техническим результатом изобретения является повышение точности измерения аналогового сигнала за счет измерения скорости изменения аналогового сигнала с предварительно установленным пороговым значением. В заявленном способе измерение аналогового сигнала производят с использованием АЦП, а при этом погрешность в виде указанного линейного смещения показаний уменьшают с помощью управляющих средств путем компенсации этого линейного смещения, а погрешность в виде указанных колебаний показаний уменьшают с помощью усредняющих средств путем усреднения показаний за время усреднения. С помощью управляющих средств сравнивают скорость изменения аналогового сигнала с предварительно установленным пороговым значением. Усреднение показаний выполняют динамически путем изменения с помощью управляющих средств времени усреднения от нуля до предварительно установленного максимального значения в случае начала изменения аналогового сигнала со скоростью, меньшей предварительно установленного порогового значения. В случае превышения указанной скоростью предварительно установленного порогового значения, указанное усреднение показаний отключают с помощью управляющих средств. 2 н. и 2 з.п. ф-лы, 1 ил.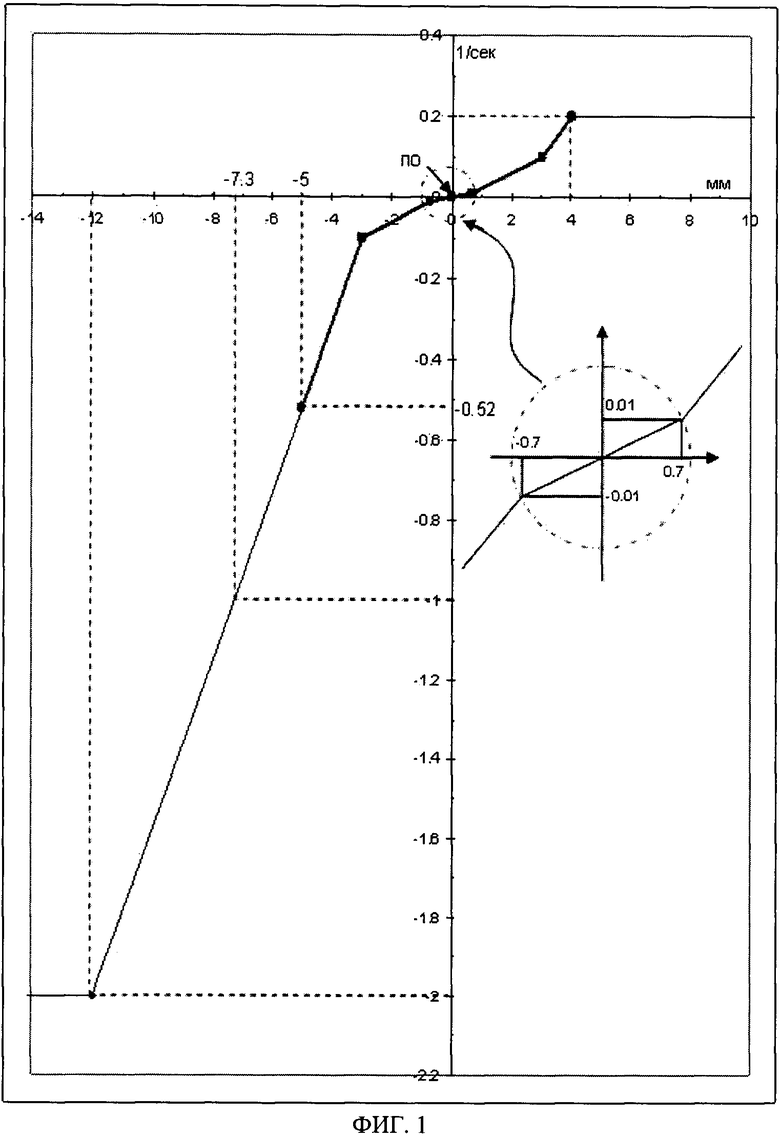
1. Способ повышения точности измерения аналогового сигнала, содержащего погрешности в виде линейного смещения и колебаний показаний, причем указанное измерение выполняют с использованием АЦП, а согласно способу
погрешность в виде указанного линейного смещения показаний уменьшают с помощью управляющих средств путем компенсации этого линейного смещения, а погрешность в виде указанных колебаний показаний уменьшают с помощью усредняющих средств путем усреднения показаний за время усреднения,
отличающийся тем, что:
сравнивают скорость изменения аналогового сигнала с предварительно установленным пороговым значением с помощью управляющих средств;
указанное усреднение показаний выполняют динамически путем изменения с помощью управляющих средств времени усреднения от нуля до предварительно установленного максимального значения в случае начала изменения аналогового сигнала со скоростью, меньшей предварительно установленного порогового значения,
и путем отключения указанного усреднения показаний с помощью управляющих средств в случае превышения указанной скоростью предварительно установленного порогового значения.
2. Способ по п.1, в котором измерение аналогового сигнала производят в заранее известном диапазоне измерений.
3. Устройство для измерения аналогового сигнала, содержащее АЦП, управляющие средства, выполненные с возможностью уменьшения погрешности в виде линейного смещения путем компенсации этого линейного смещения, и усредняющие средства, выполненные с возможностью уменьшения погрешности в виде колебаний показаний путем усреднения показаний за время усреднения,
отличающееся тем, что
управляющие средства дополнительно выполнены с возможностью сравнения скорости изменения аналогового сигнала с предварительно установленным пороговым значением, с возможностью изменения времени усреднения от нуля до предварительно установленного максимального значения в случае начала изменения аналогового сигнала со скоростью, меньшей предварительно установленного порогового значения, и с возможностью отключения указанного усреднения показаний в случае превышения указанной скоростью предварительно установленного порогового значения с обеспечением динамического усреднения показаний.
4. Устройство по п.3, выполненное с возможностью использования в составе электрогидравлической системы управления и регулирования турбин.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Прибор для испытания механических свойств пластичных грунтов | 1929 |
|
SU13903A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО СМЕЩЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2252395C1 |
| ВЫСОКОЭФФЕКТИВНЫЙ УСИЛИТЕЛЬ МОЩНОСТИ С ПАРАЛЛЕЛЬНЫМИ КАСКАДАМИ | 1996 |
|
RU2175809C2 |

