Изобретение относится к устройству управления для использования в области точной механики или хирургии, например для использования в эндоскопах или т.п.
Прежде всего, изобретение относится к устройству управления для использования в области высокоточной механики или минимально инвазивной хирургии.
Такие устройства управления известны из уровня техники и имеют проксимальный, то есть обращенный к пользователю/хирургу, и обращенный от него или дистальный концевой участок, который в каждом случае включает в себя зону сочленения, а также расположенный между концевыми участками, зачастую выполненный прочным на изгиб средний участок. Кроме того, они включают в себя внешний, выполненный в форме полого цилиндра стержень, внутренний, выполненный в форме полого цилиндра стержень, а также расположенный между этими стержнями элемент управления с двумя или более простирающимися по существу от проксимального к дистальному концевому участку устройства управления, передающими усилие продольными элементами. Передающие усилие продольные элементы расположены по существу равномерно в направлении по окружности устройства управления и в области проксимального и дистального концевого участка соединены между собой, соответственно, в направлении по окружности. Через продольные элементы могут передаваться растягивающие усилия и усилия нажима, при помощи которых поворотное движение на проксимальном концевом участке может быть преобразовано в соответствующее поворотное движение на дистальном концевом участке.
Устройства управления этого типа, например, известны из WO 2005/067785 А1, в котором используется множество передающих усилие продольных элементов в форме проволок или кабелей, которые в направлении по окружности расположены с непосредственным контактом друг с другом и, таким образом, проходят по бокам друг от друга. Для размещения передающих усилие продольных элементов в радиальном направлении предусмотрен внешний и внутренний выполненный в форме полого цилиндра стержень, так что обеспечивается размещение передающих усилие продольных элементов в каждом направлении.
Как правило, на проксимальном конце устройства управления монтируется приводимая в действие вручную рукоятка, на месте которой, разумеется, также могут находиться приводимые в действие двигателем органы управления, в то время как на дистальном конце, который также называют головной частью, - функциональные детали, прежде всего инструменты, камеры, осветительные элементы и т.п.
При помощи таких содержащих устройство управления инструментов в механической области можно осматривать и ремонтировать, например, сложные и труднодоступные внутренние полости, например двигателей, машин, радиаторов и т.п., или же проводить вышеуказанные операции в минимально инвазивной сфере.
Традиционные устройства управления могут быть изготовлены с различными, минимально допустимыми углами изгиба, которые являются следствием структуры или же конструкции зон сочленения. Следствием этого являются рабочие участки различного размера для подсоединенных на дистальном конце функциональных деталей.
В ряде случаев применения оснащенные устройством управления инструменты должны быть удалены из рабочей области и снова введены, если это необходимо для смены, очистки, обслуживания или дополнения смонтированных на дистальном концевом участке функциональных деталей. После повторного введения инструментов в прежнюю рабочую область, желательно, чтобы максимально просто можно было повторно найти прежнее рабочее положение.
Задача настоящего изобретения заключается в том, чтобы минимизировать издержки, которые необходимы для того, чтобы выполнить инструменты для отличающихся и/или различных по величине рабочих областей.
Вместе с первоначально описанным устройством управления изобретение предлагает для решения этой задачи, что устройство управления включает в себя держатель, при помощи которого часть зоны сочленения является закрепляемой прочно на изгиб относительно продольного направления среднего участка устройства управления или примыкающего к его проксимальному или дистальному концевому участку функционального устройства.
За счет используемого согласно изобретению с устройством управления держателя может быть различным образом отрегулирован максимальный угол изгиба дистальной зоны сочленения, за счет чего на сторонах проксимального концевого участка сокращается зона сочленения, следствием чего является обусловленное конструкцией сокращение максимального угла изгиба на сторонах проксимального концевого участка. Так как угол изгиба на сторонах концевого участка и в его зоне сочленения зависит от угла изгиба на проксимальном концевом участке, таким образом, также ограничивается максимальный угол изгиба дистального концевого участка.
Таким образом, при помощи настоящего изобретения для каждого нового применения одного и того же устройства управления может быть заново установлен максимальный угол изгиба или также может быть изменен во время использования, в результате чего, например, при эндоскопическом удалении патологических структур может быть настроена определенная рабочая область под визуальным контролем оператора.
Согласно первому варианту предлагаемого устройства управления держатель включает в себя перемещаемую вдоль продольной оси среднего участка устройства управления прочную на изгиб втулку.
Если прочная на изгиб втулка смещается от среднего участка параллельно продольной оси устройства управления через область проксимальной зоны сочленения, результатом этого является сокращение зоны сочленения и, таким образом, сокращение максимального угла изгиба.
В принципе, перемещаемая прочная на изгиб втулка может быть расположена внутри устройства управления. Однако, предпочтительным образом, она расположена на внешнем контуре внешнего стержня, так как здесь к ней обеспечивается более легкий доступ и ее можно легче закрепить.
Согласно другому варианту предлагаемого устройства управления держатель включает в себя опирающийся на функциональное устройство проксимального концевого участка, то есть, как правило, устройства обслуживания, удерживающий элемент, что влечет за собой следующее преимущество: область зоны сочленения со стороны проксимального конца может быть сокращена, в результате чего устройство управления остается неизменным на протяжении большей длины и, например, может быть вставлено в троакар.
Предпочтительным образом, опирающийся на устройство обслуживания удерживающий элемент включает в себя кольцо, которое может перемещаться по внешнему контуру внешнего стержня, и может закрепляться на устройстве обслуживания за счет перемычки с прямолинейной направляющей.
Особо предпочтительно, в предлагаемом устройстве управления держатель выполнен таким образом, что держатель выполнен с возможностью позиционирования и, предпочтительным образом, также закрепления в одном или нескольких заданных положениях.
Таким образом, заранее может быть установлен максимальный угол изгиба устройства управления и, прежде всего, также заданным образом ограничен за счет заданных положений держателя.
Если используется держатель, который опирается на стороны устройства обслуживания, то максимальный угол изгиба может быть легко адаптирован для возможно возникающих проблемных положений также во время использования предлагаемого устройства управления.
Предпочтительным образом, в предлагаемом устройстве управления передающие усилие продольные элементы расположены латерально на расстоянии друг от друга. Это исключает силы трения между продольными элементами при приведении в действие устройства управления и обеспечивает его экономное с точки зрения использования энергии обслуживание.
В зависимости от типа устройства управления может иметь значение, что между передающими усилие продольными элементами расположены распорные элементы, в результате чего продольные элементы по длине устройства управления удерживаются в заданном положении.
Альтернативно этому может быть предусмотрено, что передающие усилие продольные элементы в продольном направлении устройства управления, по меньшей мере частично, находятся в непосредственном контакте друг с другом, при этом во многих случаях за счет этого уже имеется достаточное боковое направление или же направление в направлении по окружности.
Особо предпочтительно, передающие усилие продольные элементы направлены внешним и внутренним стержнем в радиальном направлении так, что возникает особенно простое и, тем не менее, точное направление продольных элементов и, таким образом, совместно с этим точно предсказуемое движение изгиба дистального конца.
В предпочтительной форме осуществления изобретения устройство управления оснащено элементом управления, который включает в себя выполненную в форме полого цилиндра деталь, стенка цилиндра которой разделена, по меньшей мере в области участка между проксимальным и дистальным концом, на два или более сегмента стенки, которые образуют передающие усилие продольные элементы.
При этом два или более сегмента стенки могут быть прочно соединены друг с другом на дистальном конце выполненной в форме полого цилиндра детали за счет кольцевого пояска.
Кроме того, два или более сегмента стенки прочно соединены друг с другом в области проксимального конца выполненной в форме полого цилиндра детали.
Особо предпочтительно, выполненная в форме полого цилиндра деталь выполнена монолитно. В данном случае манипуляция при сборке инструмента является особо простой. Кроме того, монолитная деталь может быть изготовлена с особой точностью относительно противоположной ориентации сегментов стенки.
Устройства управления в этой форме осуществления, прежде всего, оснащены выполненной в форме полого цилиндра деталью, которая изготовлена из единственной трубочки, при этом разделение стенки цилиндра на сегменты стенки, предпочтительным образом, осуществляется при помощи резания лазерным лучом.
Устройства управления этого типа также могут быть реализованы с очень маленькими внешними радиусами, например, ок. 2 мм или также, прежде всего, менее прим. 1,5 мм, и, тем не менее, внутри остается большой просвет, за счет которого могут быть реализованы прочие функции. Например, свободного просвета еще достаточно для того, чтобы можно было перенести, прежде всего, отсосать, кусочки ткани из операционной области или чтобы поместить области проведения операции источник света и сопутствующие оптические устройства.
Разумеется, также возможны предлагаемые устройства управления с любыми большими диаметрами.
В качестве материала для изготовления устройства управления, прежде всего элемента управления в форме выполненной в форме полого цилиндра детали, предлагаются, прежде всего, стальные сплавы или нитинол.
В еще одном предпочтительном устройстве управления настоящего изобретения предусмотрено, что передающие усилие продольные элементы, по меньшей мере участками, расположены в форме спирали, так что их проксимальный и дистальный концы в направлении по окружности закреплены в различных угловых положениях. Таким образом, можно достичь того, что движение дистального конца в плоскости вращения может осуществляться в другой плоскости, нежели движение проксимального конца в плоскости вращения или также, что движение проксимального конца и дистального конца в плоскости вращения осуществляется в известной степени в противоположном направлении, и устройство управления принимает U-образную форму. Это случай, когда проксимальный и дистальный концы передающих усилие продольных элементов установлены в отличающемся на 180° угловом положении в направлении по окружности.
Передающие усилие продольные элементы могут иметь различную конструкцию и, прежде всего, быть представленными в форме кабелей или проволок.
Передающие усилие продольные элементы могут, кроме того, иметь поперечное сечение в форме банана.
Как уже было упомянуто ранее, в особо предпочтительной форме осуществления передающие усилие продольные элементы состоят из выполненной в форме полого цилиндра детали, у которой, например, при помощи резания лазерным лучом, стенка цилиндра на большей ее части, прежде всего почти по всей длине в аксиальном направлении, для выполнения передающих усилие продольных элементов оснащена прорезями. Продольные элементы при этом состоят из сегментов стенки цилиндра, которые в поперечном сечении имеют форму полукруглой арки.
Предпочтительным образом, сегменты стенок имеют в поперечном сечении форму полукруглой арки, которая соответствует углу изгиба от ок. 20° или более, прежде всего 30° или более.
Количество сегментов стенки составляет, предпочтительным образом, от 4 до 16, еще более предпочтительно от 6 до 12.
Расстояние между сегментами стенки в направлении по окружности (соответствует ширине прорезей) составляет при измерении в угловых градусах предпочтительным образом прим. 2-15°, еще более предпочтительно прим. 4° - прим. 8°.
Ширина прорезей, которая возникает при резке лазерным лучом, может при необходимости быть увеличена, так что оставшиеся выполненные в форме полос сегменты стенки могут перемещаться друг относительно друга без соприкосновения. По причине поперечных сечений продольных элементов в форме кругового сегмента состояние продольных сегментов без соприкосновения остается также в случае нагрузки растяжения или давления, в том числе в областях сочленения; это действительно, прежде всего, при прохождении продольных сегментов в радиальном направлении между внутренним и внешним стержнем.
Оба концевых участка полого цилиндрического элемента остаются без прорезей, так что продольные элементы могут быть соединены между собой кольцевыми поясками.
Кроме того, в предлагаемом устройстве управления может быть предусмотрено, что проксимальная зона сочленения имеет протяженность в продольном направлении устройства управления, которое отличается от протяженности дистальной зоны сочленения. Такая мера позволяет предусмотреть различные передаточные соотношения, так чтобы относительно большое угловое перемещение на проксимальном конце вызывало небольшое изменение угла отклонения на дистальном концевом участке или наоборот.
Еще один существенный аспект предлагаемого устройства управления также заключается в том, что соотношение длин проксимальной и дистальной зон сочленения может свободно изменяться в заданных границах. Таким образом, соотношение длин может регулироваться в зависимости от потребности с соответствующем преобразованием поворотного движения проксимального концевого участка в поворотное движение дистального концевого участка и закрепленного на нем функционального устройства.
В еще одном предпочтительном согласно изобретению устройстве управления может быть предусмотрено, что по меньшей мере одна из зон сочленения имеет эластичную конструкцию, в результате чего, по меньшей мере частично, был организован самопроизвольной возврат изогнутых концевых участков после прекращения приложения силы. Предпочтительным образом, зоны сочленения внешнего и/или внутреннего стержня в направлении по окружности оснащены несколькими прорезями, которые отделены друг от друга участками стенки в направлении по окружности или же в аксиальном направлении.
Также и здесь для внешнего или же внутреннего стержня также могут быть использованы выполненные монолитно трубочки.
Наряду с изготовленным из монолитной трубочки элементом управления, как он уже был описан выше, в самом простом случае из трех вставленных друг в друга трубок с функциями внешнего стержня, элемента управления и внутреннего стержня образуется структура с очень тонкими стенками, но, тем не менее, выдерживающая механическую нагрузку, при этом при помощи устройства управления можно управлять размещенными устройствами, например зажимами, и располагать их, исключая наложения движения одного элемента на другой. Прежде всего, например, зажим может перемещаться и вращаться внутри устройства управления, при этом исключено изменение угла поворота и положения самого элемента управления или влияние на функцию зажима. Столь же незначительны возникающие противоположные перемещения. Движения вращения на 360° могут выполняться без проблем.
Кроме того, эти устройства управления можно легко разобрать, стерилизовать и снова собрать.
Предпочтительным образом, соответствующий участок стенки в направлении по окружности оснащен двумя или более, прежде всего тремя или более, прорезями, расположенными друг за другом. Прорези при этом, предпочтительным образом, расположены в направлении по окружности на равном расстоянии друг относительно друга.
В аксиальном направлении зоны сочленения предпочтительных устройств управления оснащены тремя или более прорезями, расположенными рядом друг с другом, при этом предпочтительным образом находящиеся рядом друг с другом прорези расположены со смещением друг относительно друга в направлении по окружности. Расстояния, на которых прорези в аксиальном направлении расположены относительно друг друга, могут быть одинаковыми или различными, при этом таким образом может быть оказано воздействие на свойства сочленения, прежде всего, радиус изгиба.
Обычно предусмотрено, что прорези представляют собой полностью пронизывающие стенку цилиндра прорези. Хорошие гибочные свойства, впрочем, тоже могут быть достигнуты, если прорези не полностью пронизывают стенку стержня, а, прежде всего, заканчиваются до достижения внутреннего контура. Таким образом, стенка стержня остается в целом закрытой, что в отдельных случаях применения, прежде всего в случае внешнего стержня, может быть желаемым.
Предпочтительная геометрия прорези присутствует, если ограничивающие прорезь поверхности стенки расположены под острым углом к радиальному направлению. Предпочтительным образом, при этом расположенные напротив друг друга поверхности стенок одной и той же прорези расположены симметрично, так что на внешнем контуре стержня возникает большая ширина прорези, чем рядом с внутренним контуром.
Предпочтительным образом, расположенные на расстоянии друг от друга в направлении по окружности прорези расположены с наложением друг на друга в направлении по окружности, однако со смещением друг относительно друг, так что возникает равномерное расположение прорезей.
Поверхности стенок прорезей могут при этом быть наклонены относительно аксиального направления под углом, который отличается от 90°, так что ширина прорези по внешнему контуру больше, чем по внутреннему контуру внешнего стержня. Таким образом, также при небольшой ширине прорези могут быть реализованы большие углы поворота, без необходимости увеличения количества прорезей или же распространения области сочленения на большую аксиальную длину.
Эти и прочие преимущества настоящего изобретения в дальнейшем поясняются более подробно со ссылкой на чертежи. В деталях показано:
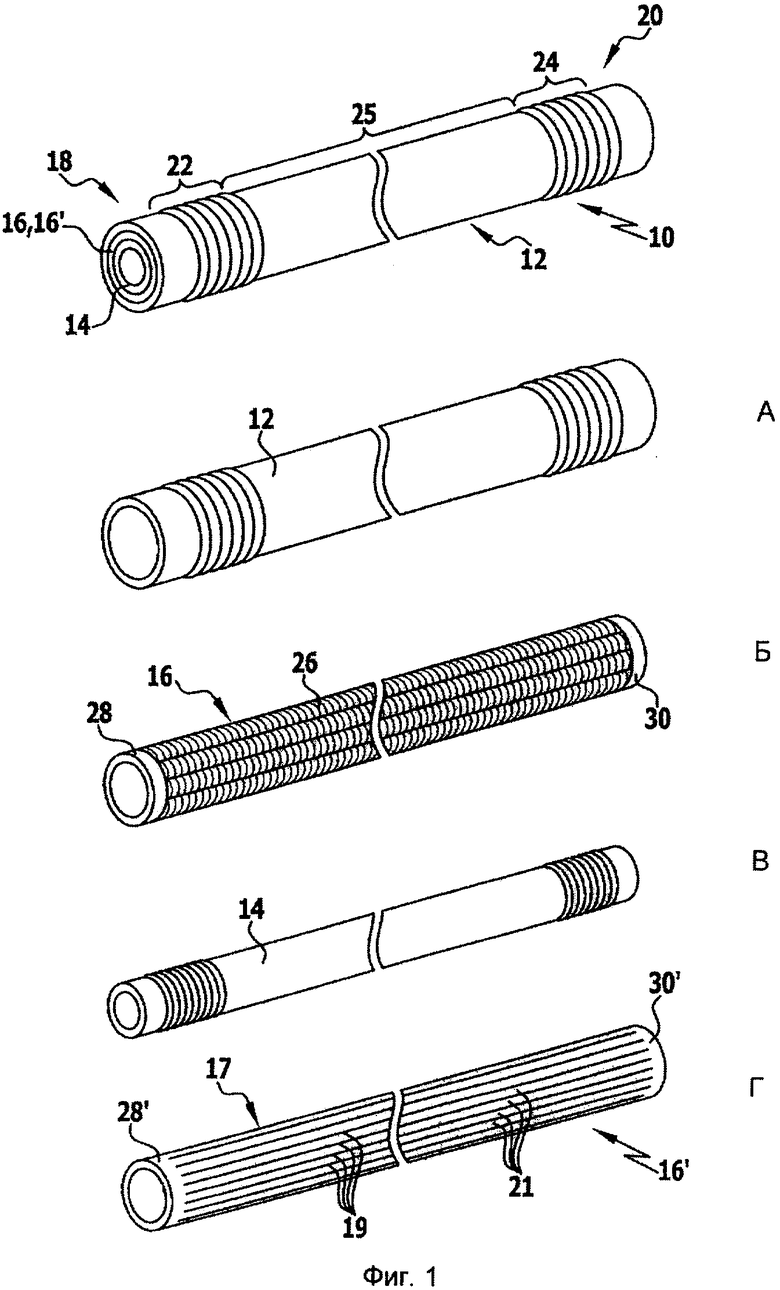
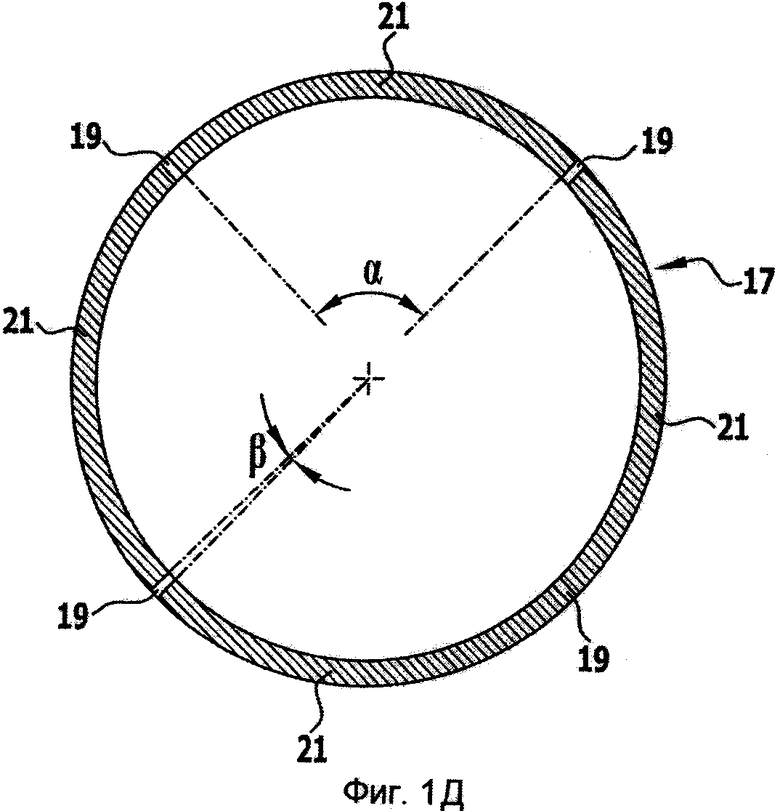
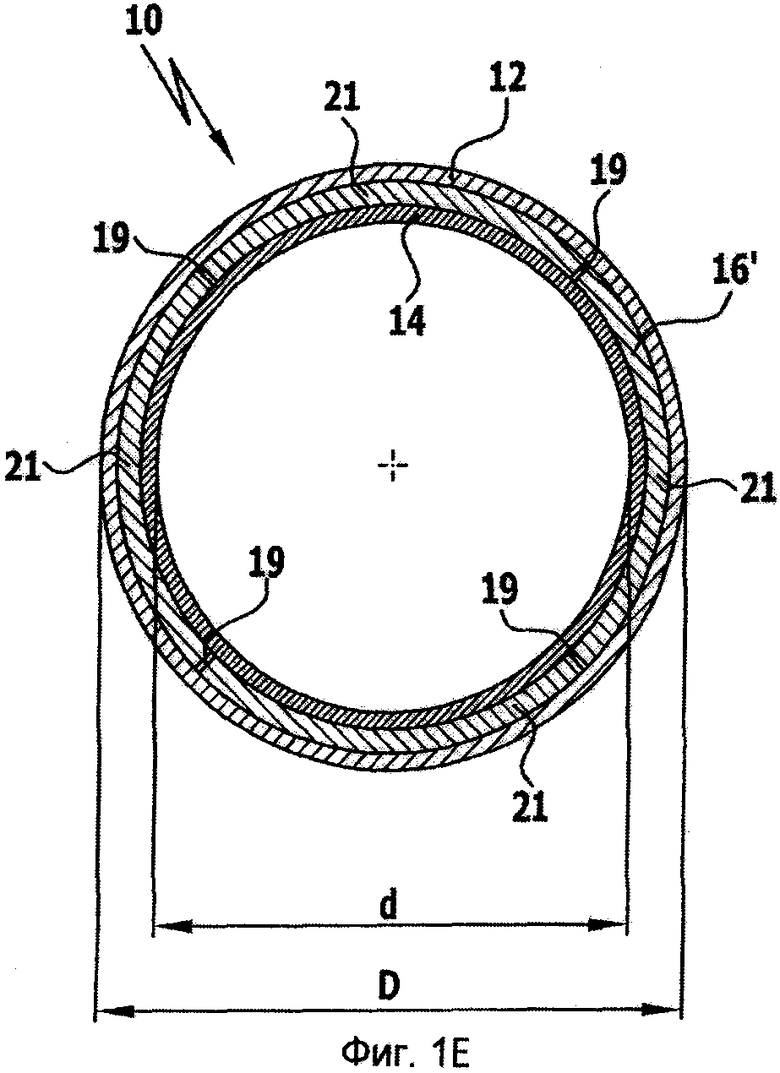
фигура 1: на частичных фигурах А, Б и В показана основополагающая конструкция предлагаемого устройства управления, состоящая из трех элементов - внешнего стержня, элемента управления, и внутреннего стержня; на частичной фигуре 1Г показан альтернативный элемент управления; на частичных фигурах 1Д и 1E - поперечные сечения элемента управления на фигуре 1Г или же устройства управления на фигуре 1;
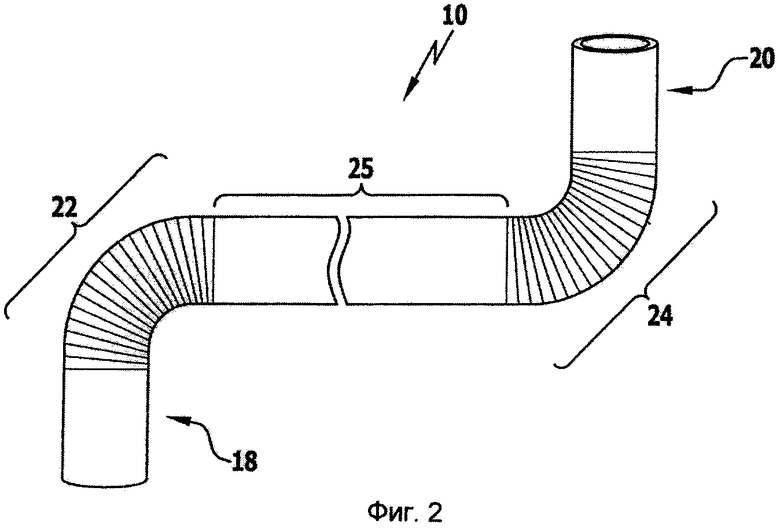
фигура 2: типичный характер движения предлагаемого устройства управления;
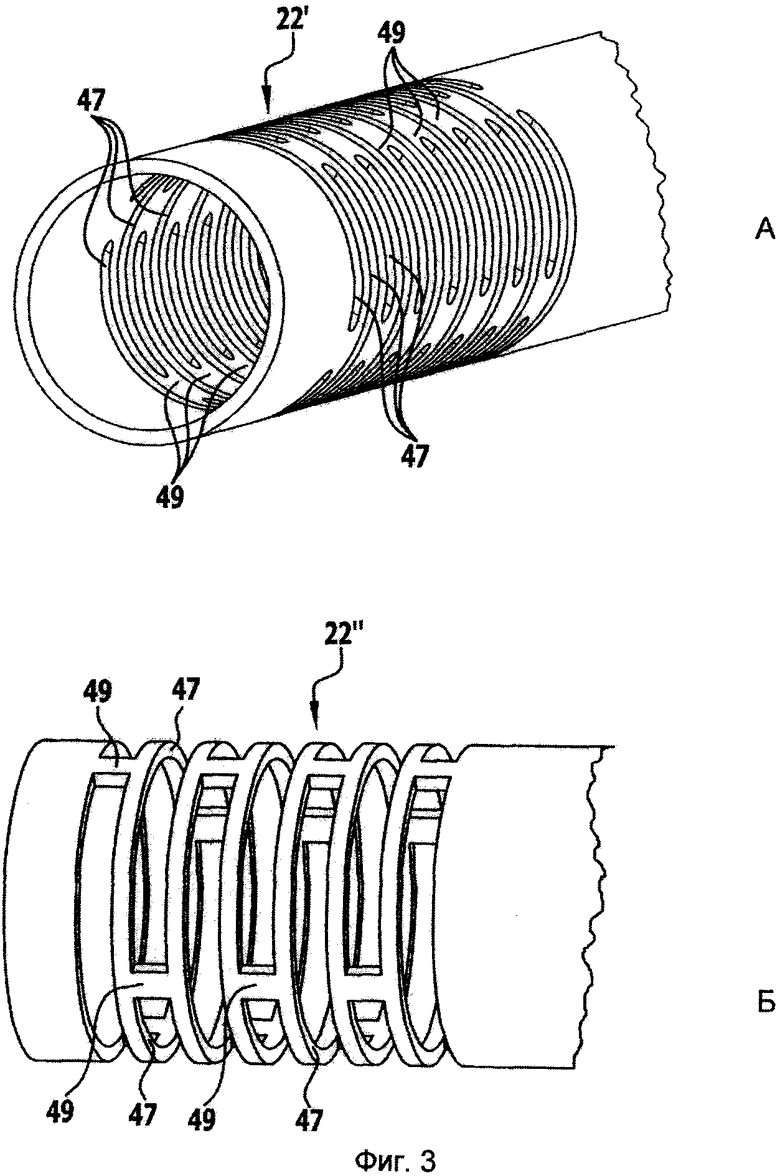
фигуры 3А и 3Б: примеры осуществления для зоны сочленения изображенного на фигурах 1A и 1B устройства управления;
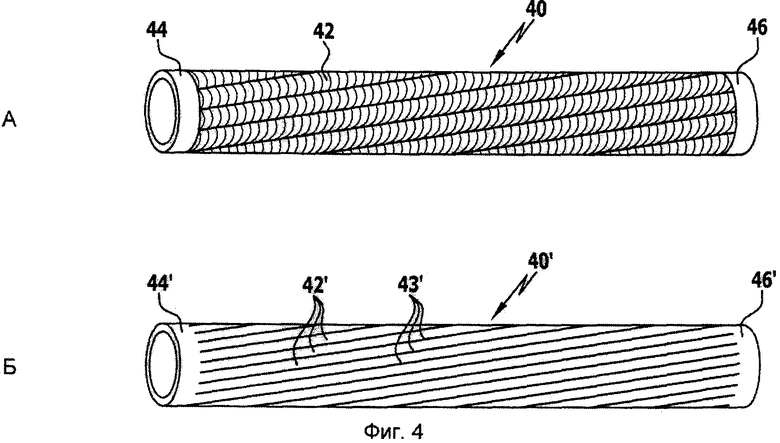
фигуры 4А и 4Б: другие альтернативные элементы управления для предлагаемого устройства управления;
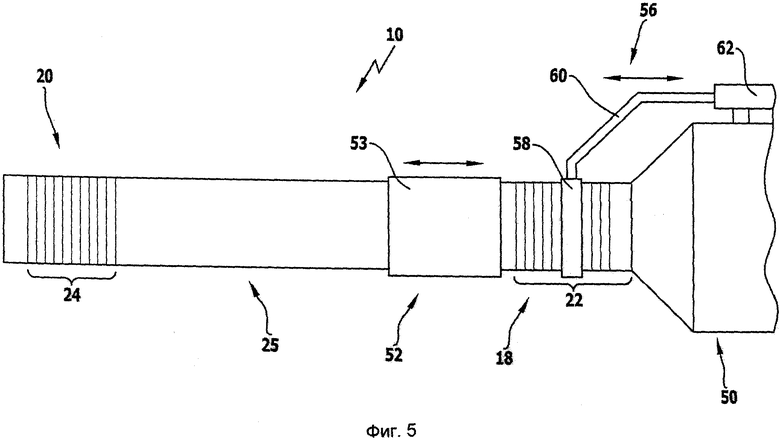
фигура 5: общий обзор предлагаемого устройства управления; и
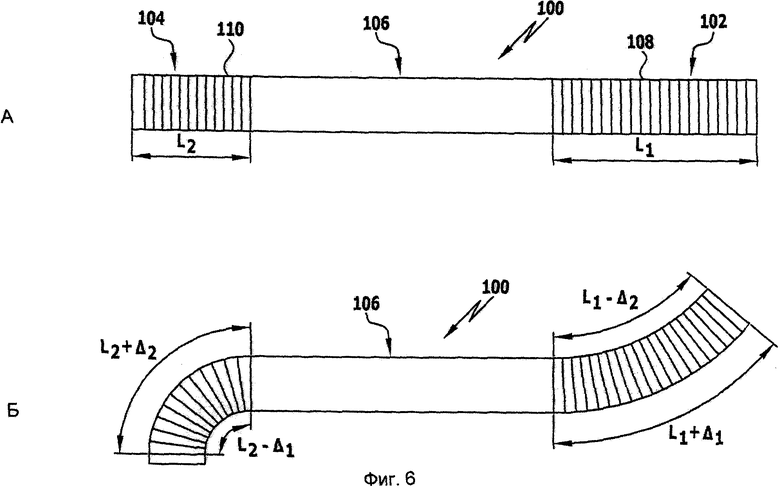
фигура 6: принцип функционирования одного варианта предлагаемого устройства управления.
На фигуре 1 показана конструкция устройства 10 управления, как оно известно из уровня техники, например из патента WO 2005/067785 А1, и как оно также может быть взято за основу настоящего изобретения.
При этом устройство 10 управления оснащено внешним, выполненным в виде полого цилиндра стержнем 12, внутренним, выполненным в виде полого цилиндра стержнем 14, а также расположенным между этими стержнями элементом 16 управления.
Внешний и внутренний стержни 12, 14, а также элемент 16 управления имеют по существу равные длины, и в отношении их внешнего и внутреннего диаметра, а также толщины стенок имеют такие размеры, что элемент управления может быть вставлен во внешний стержень с соблюдением точности посадки, а внутренний стержень 14 может быть вставлен во внутреннюю область элемента 16 управления с соблюдением точности посадки. Внутренняя область внутреннего стержня 14 остается как свободный просвет свободной для ввода устройств управления инструментами, питающих проводов к камере или других оптических элементов и т.п.Элемент 16 управления направлен в радиальном направлении за счет стенки внешнего и внутреннего стержней 12, 14.
Устройство 10 управления имеет проксимальный концевой участок 18, а также дистальный концевой участок 20, которые, соответственно, включают в себя зоны сочленения 22 или же 24.
Типичным образом, зона сочленения 22, 24 образована за счет соответствующей конструкции внешнего и/или внутреннего стержня 12, 14, при этом в уровне техники в этом отношении закреплены многочисленные предложения, среди прочего также в WO 2005/067785 А1.
На фигуре 1 указаны зоны сочленения 21, 24 исключительно в выполненных по типу сильфонов структур.
На фигурах 1А, 1Б и 1В еще раз показаны отдельные элементы представленного на фигуре 1 устройства 10 управления, при этом на фигуре 1А показан внешний стержень 12, на фигуре 1Б - элемент 16 управления, а на фигуре 1В - внутренний стержень 14.
Внешний стержень 12 в областях, которые соответствуют зонам сочленения 22 и 24, имеет структуру, которая обеспечивает подвижность или же способность к изгибу внешнего стержня 12 в этой области. Например, здесь, как упомянуто выше, могут использоваться выполненных по типу сильфонов структуры. Альтернативно, за счет ослабления стенки внешнего стержня 12 на соответствующих зонам сочленения 22, 24 участках создается соответствующая способность к изгибу или же эластичность.
Внутренний стержень 14 на фигуре 1В может иметь похожую структуру, что и внешний стержень 12 на фигуре 1А, так что можно сослаться на описание фигуры 1А.
Элемент 16 управления на фигуре 1Б включает в себя несколько, в настоящем примере восемь, передающих усилие продольных элементов, которые расположены параллельно продольному направлению элемента 16 управления, и последние на соответствующих концах элемента 16 управления в направлении по окружности латерально соединены между собой в кольцевые пояски 28, 30.
На фигуре 1Г показана альтернативная форма осуществления регулирующего элемента 16′, который изготовлен из монолитной трубочки 17, например, посредством резания лазерным лучом.
Образованные в трубочке 17 за счет резания лазерным лучом прорези 19 проходят почти по всей длине трубочки 17, так что только на проксимальном и дистальном концах остаются не оснащенные прорезями кольцевые пояски 28′, 30′, которые, соответствующим образом, соединяют друг с другом функционирующие как передающие усилие продольные элементы сегменты 21 стенки.
На фигуре 1Д показано поперечное сечение элемента управления на фигуре 1Г, в котором, впрочем, имеются только четыре сегмента 21 стенки. Круговые сегменты сегментов 21 стенки соответствуют углу изгиба а, составляющему ок. 82°-86°. Протяженность прорезей 19 в направлении по окружности соответствует углу В, составляющему ок. 4°-8°.
Поперечное сечение устройства 10 управления показано на фигуре IE, при этом в качестве элемента управления используется представленный на фигуре 1Г элемент 16′ управления, однако, с четырьмя сегментами 21 стенки.
В качестве примера можно указать внешний диаметр D ок. 2,5 мм и внутренний диаметр ок. 1,8 мм.
Благодаря размещению передающих усилие продольных элементов 26 между внешним и внутренним стержнем 12, 14 в устройстве 10 управления при изменении направления проксимального концевого участка 18 в той же плоскости вращения, однако в противоположном направлении, возникает изменение направления дистального концевого участка в области зоны 24 сочленения на ту же самую величину угла. Такая ситуация показана на фигуре 2.
Конструкция шарнирных участков в форме эластичных участков 22, 24 внутреннего или же внешнего стержня может быть разнообразной.
На фигурах 3А и 3Б показаны два варианта родственных конструкций эластичных участков, в данном случае в форме участков 22′ или же 22′′. Тот же самый тип конструкции также предлагается для эластичного участка внутреннего стержня 14.
Общим в обоих вариантах является использование структуры прорезей с расположенными в направлении по окружности прорезями 47 в выполненном в форме полого цилиндра стержне. Предпочтительным образом, вдоль линии контура имеются два или более отделенных друг от друга перемычками 49 прорези. Так как расположение прорезей вдоль только одной линии контура позволило бы иметь только очень маленький угол поворота, в типичных структурах прорезей зоны 22′ сочленения имеется несколько расположенных на расстоянии вдруг от друга в аксиальном направлении окружных линий с прорезями 47. Предпочтительным образом, находящиеся по соседству в аксиальном направлении прорези 47 расположены со смещением друг относительно друга в направлении по окружности, так что создаются возможности изгиба в нескольких плоскостях.
На фигуре 3Б имеются по два прорези 47 на одну окружную линию, которые отделены друг от друга перемычками 49. На фигуре 3А имеется три прорези 47. Структура прорезей включает в себя в обоих случаях несколько прорезей 47, которые расположены вдоль нескольких упомянутых и расположенных на расстоянии друг от друга окружных линий. Посредством выбора структуры прорезей и количества прорезей очень легко можно задать допустимый угол поворота, а также адаптировать к соответствующему случаю применения прочие свойства шарнирного участка, такие как, например, прочность на изгиб.
Поворот дистального шарнирного участка в любых других задаваемых направлениях относительно поворотного движения проксимального конца, то есть также в направлениях, которые находятся не в той же плоскости, возможен при использовании элемента управления, у которого передающие усилие продольные элементы установлены своими проксимальным и дистальным концами в угловые положения в направлении по окружности, которые отличаются на определенную величину угла, например на 180°, как показано в примере на фигурах 4А и 4Б.
На фигуре 4А показан элемент 40 управления для предлагаемого устройства 10 управления, в котором по всей его длине восемь передающих усилие продольных элементов 42 расположены в виде спирали и закреплены со смещением в 180° на проксимальном и дистальном кольцевых поясках 44, 46.
Поворотное движение проксимального участка 18 устройства 10 управления наверх приводит здесь к поворотному движению дистального участка 20 в той же самой плоскости также наверх.
Принимая во внимание, что диаметры стандартных элементов управления составляют только несколько миллиметров, а, с другой стороны, необходимые длины элементов управления - 10 см или существенно более, углы, на которые расположенные в форме спирали продольные элементы отклоняются от продольного направления элементов управления, существенно меньше, чем впечатление, которое, возможно, возникает на фигурах 4А и 4Б. Для того чтобы это лучше разъяснить, здесь представлены два примера с цифрами:
В инструменте, таком как он обычно используется в нейрохирургии, длина устройства управления составляет ок. 30 см, длина относящегося к нему элемента 40, 40′ управления, таким образом, составляет также 30 см. Как правило, внешний диаметр элемента 40, 40′ управления составляет 1,7 мм. Если выбрать угловое смещение 180°, с которым проксимальный и дистальный концы передающих усилие продольных элементов 42, 42′ закреплены на кольцевых поясках 44, 46 или же 44′, 46′, то получится спиралеобразная форма продольных элементов, при которой спиральная линия наклонена под углом ок. 0,5° относительно продольной оси элемента.
В используемом в лапароскопии инструменте устройство управления имеет длину, например, 22 см, которая соответствует длине элемента 40 управления, 40′. Внешний диаметр элемента 40, 40′ управления относительно большого размера и составляет ок. 9,7 мм.
При этой меньшей длине устройства 10 управления при одновременно очевидно большем диаметре получается угол 3,9°, под которым спиральная линия, вдоль которой расположены передающие усилие продольные элементы 42, 42′, наклонена относительно продольной оси элемента 40, 40′ управления.
Оба вышеуказанных примера могут быть поняты как примеры предельных случаев, и в подавляющем большинстве предлагаемых устройств 10 управления углы наклона продольных элементов 42, 42′ относительно продольной оси элемента 40, 40′ управления находятся в указанных в этих примерах границах.
Если выбрать другие смещения, отличные от 180°, которые были описаны выше со ссылкой на фигуры 4А и 4Б, то получают отклоняющееся направление поворота для дистального конца 20. Например, при смещении на 90° изгиб проксимального участка 18 в плоскости бумаги ведет к отклонению дистального конца 20 от плоскости бумаги в перпендикулярном направлении.
Предпочтительным образом, элементы управления для предлагаемых устройств управления являются заменяемыми, так что устройству 10 управления может быть сообщена различная кинематическая геометрия только за счет замены элемента 16, 16′ или же 40, 40′ управления.
На фигуре 4Б показан вариант регулирующего элемента 40′, который, как и регулирующий элемент 16′ на фигуре 1Г, образован из монолитной трубочки при помощи резания лазерным лучом. Возникающие при этом сегменты 42′ стенки отделены друг от друга прорезями 43′ и соединены друг с другом только в области кольцевых поясков 44′, 46′ с силовым замыканием. Преимущества спиральной траектории сегментов стенки те же, что и у регулирующего элемента 40 со спирально расположенными продольными сегментами 42.
И наконец, на фигуре 5 показано настоящее изобретение на примере устройства 10 управления, которое присоединено своим проксимальным концевым участком 18 к манипулятору 50.
Зоны 22 и 24 сочленения по существу имеют равную длину, так что при изменении угла расположения проксимального концевого участка 18, например, на 30° возникает соответствующее изменение угла расположения дистального концевого участка также на 30°. Направление, в котором осуществляется отклонение дистального концевого участка 20, зависит от выбора не показанного здесь детально регулирующего элемента и размещения концов передающих усилие продольных элементов, как это детально было описано выше.
Показанное на фигуре 5 устройство 10 управления дополнительно оснащено держателем 52 в форме втулки 53, которая расположена на внешнем стержне устройства 10 управления, накладываясь на средний участок 25 с продольным смещением.
Если сместить втулку 53 в направлении проксимального концевого участка 18 и обеспечить наложение втулки 53 на эту зону 22 сочленения, то зона 22 сочленения сократится, за счет чего ограничится ее максимальный угол изгиба. Таким образом, допустимый угол изгиба в области дистального концевого участка 20 может быть по-разному настроен, так что, например, при эндоскопическом удалении патологических структур под визуальным контролем оператора может быть настроен определенный рабочий участок.
На фигуре 5 показано альтернативное решение в отношении держателя 52 в форме держателя 56, которое включает в себя кольцо 58, которое над дважды изогнутой перемычкой 60 с прямолинейной направляющей 62 закреплено с продольным смещением по отношению к манипулятору 50. За счет изменения положения кольца 58 вдоль участка 18, как разъяснено выше в отношении втулки 53, имеющаяся в наличии для движения изгиба проксимального концевого участка часть зоны 22 сочленения может быть сокращена, в результате чего снова допустим только ограниченный угол изгиба на стороне дистального концевого участка 20.
Кроме того, возможно, что как в случае втулки 53, так и в случае кольца 58, может быть осуществлена фиксация в заданной позиции, то есть с заданным наложением зоны сочленения, так что обеспечивается установленная ограниченная рабочая область на стороне дистального концевого участка 20.
С другой стороны, возможно, что втулка 53 также перемещается в направлении дистального шарнирного участка 20, при этом затем при соответствующем колебательном движении проксимального концевого участка 18 осуществляется переданное в другом соотношении, то есть усиленное поворотное движение в области дистального концевого участка 20.
Также возможно, что предусмотрены маркировки для позиции втулки 53 или же кольца 58 или его прямолинейной направляющей 62, так чтобы однажды найденное угловое ограничение также могло бы быть много раз точно настроено впоследствии.
Для разъяснения вышеописанного эффекта усиления поворотного или изгибного движения на дистальном конце следует также сослаться на фигуру 6, на которой показано устройство 100 управления, которое имеет проксимальный концевой участок 102, дистальный концевой участок 104, а также расположенный между ними средний участок 106. В то время как средний участок 106 имеет прочную на изгиб конструкцию, проксимальный и дистальный концевые участки 102, 104, соответственно, содержат зону сочленения 108 или же 110 с измеренной в аксиальном направлении длиной L1 или же L2. Длина L2 при этом выбрана более короткой, чем длина L1. На фигуре 6А показано устройство 100 управления в исходном положении, в котором на проксимальный концевой участок 102 не воздействуют силы.
Если проксимальный концевой участок 102 отклоняется от аксиального направления, как это поясняется на изображении фигуры 6Б, то в проксимальной зоне 108 сочленения по внешнему радиусу изогнутой концевой области 102 возникает увеличенная длина зоны 108 сочленения L1+А1, а по внутреннему радиусу - сокращенная длина L1-А2.
Соответствующие изменения в длинах возникают для дистального концевого участка 104 с длиной по внешнему радиусу L2+А2 и длиной по внутреннему радиусу L2-А1. Так как длины L1 и L2 зон сочленения 108, 110 являются различными, то для дистального концевого участка 104 принудительным образом возникает усиленное изгибное движение для того, чтобы можно было следовать заданным проксимальным концевым участком изменениям в длине.
Этот эффект также может быть использован, например, для того, чтобы обеспечить возможность в проксимально ограниченной рабочей области со сравнительно небольшими поворотными движениями полноценного использования дистально заданного радиуса колебаний и сделать дистально доступной максимально большую рабочую область.
Этот принцип может различным образом использоваться с настоящим изобретением, в процессе чего за счет держателя (сравн. фиг.5) длина одной зоны сочленения может меняться по сравнению с другой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2010 |
|
RU2515515C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ХИРУРГИЧЕСКОЕ СШИВАЮЩЕЕ И РЕЖУЩЕЕ УСТРОЙСТВО | 2012 |
|
RU2632513C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ИСПОЛНИТЕЛЬНЫМ УСТРОЙСТВОМ НА ДИСТАЛЬНОМ КОНЦЕ | 2007 |
|
RU2478347C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ДИСТАЛЬНО УСТАНОВЛЕННЫМ ПНЕВМАТИЧЕСКИМ ВРАЩАТЕЛЬНЫМ ЭЛЕМЕНТОМ ПРИВОДА | 2007 |
|
RU2469665C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ЕМКОСТЬЮ ХРАНЕНИЯ УВЕЛИЧЕННОГО ОБЪЕМА | 2007 |
|
RU2477087C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2559922C1 |
Изобретение относится к медицине. Устройство управления включает проксимальный и дистальный концевые участки с зонами сочленения, а также расположенный между ними прочный на изгиб средний участок, содержащее внешний, выполненный в форме полого цилиндра стержень, внутренний, выполненный в форме полого цилиндра стержень, а также расположенный между этими стержнями элемент управления с двумя или более простирающимися по существу от проксимального к дистальному концевому участку устройствами управления, передающими усилие продольными элементами, при этом продольные элементы в направлении по окружности устройства управления расположены через по существу равные угловые промежутки друг от друга и в области их проксимальных и дистальных концов соединены, соответственно, друг с другом. Предлагается, что устройство управления включает в себя держатель, при помощи которого часть зоны сочленения является закрепляемой прочно на изгиб относительно продольного направления среднего участка устройства управления или примыкающего к его проксимальному или дистальному концевому участку функционального устройства. Тем самым, с минимальными издержками инструменты могут быть адаптированы для отличающихся и/или различных по величине рабочих областей. 25 з.п. ф-лы, 6 ил.
1. Устройство управления, прежде всего для использования в эндоскопах или т.п., с проксимальным и дистальным концевыми участками, каждый из которых включает в себя зону сочленения, а также с расположенным между ними прочным на изгиб средним участком, содержащее внешний выполненный в форме полого цилиндра стержень, внутренний выполненный в форме полого цилиндра стержень, а также расположенный между этими стержнями элемент управления с двумя или более простирающимися, по существу, от проксимального к дистальному концевому участку устройства управления, передающими усилие продольными элементами, которые в направлении по окружности устройства управления расположены через, по существу, равные угловые промежутки друг от друга и соединены друг с другом в направлении по окружности в области их проксимальных и дистальных концов, отличающееся тем, что
устройство управления включает в себя держатель, при помощи которого часть зоны сочленения является фиксируемой прочно на изгиб относительно продольного направления среднего участка устройства управления или примыкающего к его проксимальному или дистальному концевому участку функционального устройства.
2. Устройство управления по п.1, отличающееся тем, что держатель включает в себя перемещаемую относительно продольной оси среднего участка устройства управления прочную на изгиб втулку.
3. Устройство управления по п.2, отличающееся тем, что прочная на изгиб втулка расположена на внешнем контуре внешнего стержня.
4. Устройство управления по п.1, отличающееся тем, что держатель включает в себя опирающийся на функциональное устройство удерживающий элемент.
5. Устройство управления по п.1, отличающееся тем, что держатель выполнен с возможностью позиционирования и, предпочтительным образом, закрепления в одном или нескольких заданных положениях.
6. Устройство управления по п.1, отличающееся тем, что передающие усилие продольные элементы расположены латерально на расстоянии друг от друга.
7. Устройство управления по п.6, отличающееся тем, что между передающими усилие продольными элементами расположены распорные элементы.
8. Устройство управления по п.1, отличающееся тем, что передающие усилие продольные элементы в продольном направлении, по меньшей мере, частично расположены в непосредственном контакте друг с другом.
9. Устройство управления по п.1, отличающееся тем, что передающие усилие продольные элементы направлены в радиальном направлении внутренним и внешним стержнями.
10. Устройство управления по п.1, отличающееся тем, что элемент управления включает в себя выполненную в форме полого цилиндра деталь, стенка цилиндра которой разделена, по меньшей мере, в области участка между проксимальным и дистальным концом на два или более сегмента стенки, которые образуют передающие усилие продольные элементы.
11. Устройство управления по п.10, отличающееся тем, что два или более сегмента стенки прочно соединены друг с другом на дистальном конце выполненной в форме полого цилиндра детали за счет кольцевого пояска.
12. Устройство управления по п.10, отличающееся тем, что два или более сегмента стенки в области проксимального конца выполненной в форме полого цилиндра детали прочно соединены между собой.
13. Устройство управления по п.10, отличающееся тем, что выполненная в форме полого цилиндра деталь выполнена монолитно.
14. Устройство управления по п.13, отличающееся тем, что выполненная в форме полого цилиндра деталь изготовлена из единственной трубочки, при этом разделение стенки цилиндра на сегменты стенки предпочтительным образом происходит посредством резания лазерным лучом.
15. Устройство управления по п.10, отличающееся тем, что выполненная в форме полого цилиндра деталь изготовлена из стального сплава или нитинола.
16. Устройство управления по п.1, отличающееся тем, что передающие усилие продольные элементы, по меньшей мере, участками расположены в виде спирали так, что их проксимальные и дистальные концы, при рассмотрении в направлении по окружности, закреплены в различных угловых положениях.
17. Устройство управления по п.1, отличающееся тем, что передающие усилие продольные элементы выполнены в форме кабеля или проволоки.
18. Устройство управления по п.1, отличающееся тем, что проксимальная зона сочленения имеет протяженность в продольном направлении устройства управления, которая отличается от протяженности дистальной зоны сочленения.
19. Устройство управления по п.1, отличающееся тем, что, по меньшей мере, одна из зон сочленения выполнена эластичной.
20. Устройство управления по п.1, отличающееся тем, что зона (зоны) сочленения внешнего и/или внутреннего стержней включает (включают) в себя участок стенки, на котором находятся несколько расположенных на расстоянии друг от друга, проходящих в направлении по окружности прорезей.
21. Устройство управления по п.20, отличающееся тем, что в направлении по окружности друг за другом расположены две или более, прежде всего три или более, прорези.
22. Устройство управления по п.20, отличающееся тем, что в аксиальном направлении рядом друг с другом расположены три или более прорези.
23. Устройство управления по п.22, отличающееся тем, что расположенные рядом друг с другом прорези расположены со смещением друг относительно друга в направлении по окружности.
24. Устройство управления по п.20, отличающееся тем, что прорези представляют собой полностью пронизывающие стенку цилиндра прорези.
25. Устройство управления по п.20, отличающееся тем, что ограничивающие прорези поверхности стенки расположены под острым углом к радиальному направлению.
26. Устройство управления по п.25, отличающееся тем, что находящиеся напротив друг друга поверхности стенок одной и той же прорези расположены симметрично, так что на внешнем контуре стержня возникает большая ширина прорези, чем рядом с внутренним контуром.
| US 2005096694 А1, 05.05.2005 | |||
| US 2008234545 A1, 25.09.2008 | |||
| US 2006178556 A1, 10.08.2006 | |||
| Клапан для спуска воды из ванны | 1926 |
|
SU6122A1 |

