Изобретение относится к хирургическому инструменту для минимально инвазивных хирургических вмешательств, содержащему инструмент, закрепленный на так называемом дистальном конце стержня, на приводном элементе. Такие инструменты часто используются как так называемые шейверы.
Хирургические инструменты такого типа имеют проксимальный, а также дистальный концевой участок и расположенный между ними средний участок. Основные детали этих инструментов образуют удлиненный, полый, внешний стержень, установленный с возможностью вращения внутри внешнего стержня, зачастую выполненный в виде полого цилиндра приводной элемент, а также расположенный на дистальном концевом участке инструмента, соединенный с приводным элементом режущий, абразивный или фрезеровочный инструмент.
Наряду с инструментами линейной конструкции, также известны хирургические инструменты, дистальный концевой участок которых расположен под углом или имеет изогнутую форму для того, чтобы при помощи хирургического инструмента также можно было получать доступ к более труднодоступным рабочим положениям и чтобы в целом увеличить область работы инструмента.
В этой связи известен вариант, когда приводной элемент между проксимальным и дистальным концевым участком снабжают гибким участком, который включает в себя несколько кольцевых сегментов, оснащенных в аксиальном направлении соответственно первым и вторым концевыми участками, при этом первый концевой участок включает в себя два или более выдающихся в аксиальном направлении выступа, а второй участок - две или более принимающих впадины, и кольцевые элементы подвижно входят друг с другом выступами и впадинами.
Хирургические инструменты такого типа известны, например, из EP 0677276 B1, при этом гибкий участок позволяет эффективным образом передавать крутящий момент от проксимального концевого участка приводного элемента на дистальный концевой участок и тем самым на подсоединенный там инструмент.
Так как шейвер типичным образом служит для удаления тканей тела, имеющийся внутри стержня и (выполненного в виде полого цилиндра) приводного элемента канал используется для всасывания удаленных частей ткани.
Недостатком этих известных инструментов является то, что изготовление, прежде всего монтаж, гибкого участка является затратным, так как гибкий участок составлен из большого количества не прочно связанных кольцевых сегментов, так что не только при изготовлении, но также и при демонтаже приводного элемента и его извлечении из выполненного в виде полого цилиндра внешнего стержня кольцевые элементы могут потеряться, прежде всего также во время операции.
Еще один шейвер, который следует этому принципу конструкции приводного элемента с входящими в зацепление друг с другом, не связанными прочно кольцевыми сегментами на гибком участке, известен из DE 102004046539 A1.
Другая отправная точка была выбрана в патенте EP 0986989 B1, в котором гибкий участок образован выполненным в виде полого цилиндра элементом, стенка которого оснащена спиралеобразными прорезями, при этом расположенные попеременно в форме меандра зубцы и углубления попеременно входят в зацепление друг с другом вдоль спиральной линии, так что в аксиальном направлении образуется сцепление витков.
Недостатком этого решения является довольно низкая гибкость и зачастую встречающиеся усталостные разрушения, которые происходят за счет нагрузки переменных изгибов при вращении стержня. В случае этого инструмента хотя и должен быть возможен осциллирующий привод, однако его можно привести в движение с большим числом оборотов только в одном направлении вращения.
Задача настоящего изобретения заключается в том, чтобы доработать хирургический инструмент первоначально описанного типа таким образом, чтобы при минимальных затратах на изготовление была возможна более надежная эксплуатация, прежде всего также при высокой скорости вращения. Еще один аспект заключается в предоставлении инструмента, который может быть использован в большом количестве различных рабочих ситуаций.
Эта задача согласно изобретению решена в хирургическом инструменте с проксимальным и дистальным концевыми участками и простирающимся между ними средним участком, включающем в себя удлиненный, полый, простирающийся от проксимального концевого участка к дистальному концевому участку внешний стержень, установленный с возможностью вращения внутри внешнего стержня приводной элемент, а также расположенный на дистальном концевом участке инструмента, соединенный с приводным элементом сверлильный, режущий, абразивный или фрезеровочный инструмент, причем приводной элемент имеет расположенный между проксимальным и дистальным концевыми участками инструмента гибкий участок, включающий в себя несколько кольцевых сегментов, каждый из которых имеет первый и второй отстоящие друг от друга в аксиальном направлении концевые участки, из которых первый концевой участок включает в себя два или более выдающихся в аксиальном направлении выступа, а второй концевой участок - две или более принимающих выступы впадины, причем кольцевые сегменты подвижно входят друг в друга выступами и впадинами, за счет того, что:
- кольцевые сегменты выступами и впадинами соединены между собой с геометрическим замыканием в аксиальном и/или радиальном направлении;
- внешний стержень включает в себя расположенную в области дистального концевого участка инструмента зону сочленения, подвижно соединяющую дистальный концевой участок и средний участок инструмента между собой, при этом гибкий участок приводного элемента имеет длину в аксиальном направлении, которая соответствует по меньшей мере по существу длине зоны сочленения внешнего стержня в аксиальном направлении;
- инструмент включает в себя расположенный во внешнем стержне управляющий элемент, при помощи которого дистальный концевой участок инструмента является отклоняемым по отношению к среднему участку.
Таким образом, установка угла наклона дистального концевого участка по отношению к среднему участку осуществляется при помощи управляющего элемента, причем предпочтительно, чтобы вызванное при этом отклонение дистального концевого участка было реверсивным. Расположение управляющего элемента во внешнем стержне обеспечивает герметизацию управляющего элемента, а соответственно, и его эксплуатационную надежность в течение длительного времени.
Управляющий элемент может включать в себя два или более передающих усилие продольных элемента, которые в направлении по окружности внешнего стержня расположены с равномерным распределением и простираются от проксимального концевого участка до дистального концевого участка инструмента. В этом случае внешний стержень на проксимальном концевом участке может включать в себя вторую зону сочленения и передающие усилие продольные элементы на их соответствующих проксимальных и дистальных концах прочно соединены друг с другом в направлении по окружности.
За счет геометрического замыкания выступов и впадин в аксиальном и/или радиальном направлении, предпочтительном образом в аксиальном и радиальном направлении, обращение с приводным элементом при изготовлении, при сборке, а также при последующем демонтаже становится существенно легче. Тем не менее, обеспечивается подвижное соединение кольцевого сегмента на гибком участке.
Если кольцевые сегменты оснащены более чем двумя выступами и впадинами, то на пару сегментов можно реализовать две и более оси сочленения.
По причине образования зоны сочленения на дистальном концевом участке последняя соединена со средним участком подвижным образом. Инструмент может по выбору использоваться при прямом расположении среднего участка и дистального концевого участка или также в большом количестве более или менее изогнутых конфигураций, которые могут быть установлены оператором и прежде всего также могут быть изменены во время работы с инструментом.
Геометрическое замыкание кольцевых сегментов в аксиальном или радиальном направлении существенно сокращает риск потери отдельных кольцевых сегментов, если потеря изначально не исключена за счет имеющегося, предпочтительным образом, аксиального или радиального геометрического замыкания.
За счет геометрического замыкания в аксиальном и/или радиальном направлении позиционирование граничащих друг с другом кольцевых сегментов может быть задано настолько точно, что высокая скорость вращения может быть реализована также в обоих возможных приводных направлениях.
Геометрическое замыкание в аксиальном направлении может быть улучшено за счет использования более чем двух выступов и впадин.
Типичным образом выступы и впадины расположены на равномерном расстоянии в направлении по окружности на соответствующем кольцевом сегменте. Это обеспечивает равномерную нагрузку кольцевых сегментов при передаче приводного усилия и тем самым максимально возможный срок службы.
Согласно одной форме осуществления настоящего изобретения выбирают нечетное количество выступов и впадин, за счет чего, прежде всего при расположении выступов и впадин на равномерном расстоянии в направлении по окружности, на соответствующем кольцевом сегменте образуется геометрическое замыкание в радиальном направлении без принятия дополнительных мер.
Дополнительно или в качестве альтернативы, геометрическое замыкание в радиальном направлении может быть достигнуто за счет того, что выступы на их расположенной радиально снаружи стороне в направлении по окружности могут иметь большую протяженность, чем на их расположенной радиально внутри стороне, и что впадины соответственно на их расположенной радиально внутри стороне в направлении по окружности имеют протяженность, которая меньше, чем соответствующая расположенная радиально снаружи протяженность в соответствующей области входящего в зацепление во впадину выступа.
Благодаря этой мере может быть получено геометрическое замыкание в радиальном направлении, независимо от того, является ли количество выступов и впадин четным или нечетным.
Геометрическое замыкание в аксиальном направлении может быть достигнуто за счет того, что выступы на их обращенном от кольцевого элемента, свободном конце имеют большую протяженность в направлении по окружности, чем на их соседнем по отношению к кольцевому элементу конце, а впадины на их открытом конце имеют меньшую протяженность в направлении по окружности, чем размер входящего в зацепление во впадину выступа на его свободном конце в направлении по окружности.
Если геометрическое замыкание реализовано как в аксиальном, так и в радиальном направлении, то в наличии имеется приводной элемент, с которым можно обращаться как с единым целым, без опасности, что отдельные детали гибкого участка потеряются.
Предпочтительным образом, такой приводной элемент изготавливают вместе с гибким участком таким образом, что сначала используется монолитный, выполненный в виде полого цилиндра элемент, на который, например, при помощи лазера наносят контуры выступов и впадин. Зачастую достаточно уже возникающего при этом зазора между ножами для того, чтобы обеспечить смещение отдельных кольцевых сегментов по отношению друг к другу так, чтобы гибкий участок приводного элемента мог образовывать достаточный для соответствующего применения угол изгиба.
Если в аксиальном направлении уже имеется в наличии геометрическое замыкание, то геометрическое замыкание в радиальном направлении также может быть реализовано за счет того, что выступы в аксиальном направлении на расположенной радиально снаружи стороне могут иметь большую протяженность в продольном направлении, чем на расположенной радиально внутри стороне, а впадины на расположенной радиально внутри стороне глубину в аксиальном направлении, которая меньше, чем длина выступов в аксиальном направлении, на их расположенной снаружи стороне.
В еще одной предпочтительной форме осуществления изобретения в направлении по окружности на сторонах выступов, а также соответственным образом у впадин предусмотрены контактные поверхности, которые являются плоскими. Таким образом, может быть оптимизирована передача крутящего момента, из чего следуют меньший износ и возможность допуска очень высокого числа оборотов.
Предпочтительная форма выступов в направлении по окружности представляет собой трапециевидную форму, даже если отличающиеся от нее формы, само собой разумеется, обеспечивают возможность реализации геометрического замыкания в аксиальном направлении. В соответствии с этим впадины в направлении по окружности предпочтительным образом имеют трапециевидную форму. В этом случае получают обширные гладкие контактные поверхности выступов и впадин.
Для обеспечения геометрического замыкания в радиальном направлении выступы, предпочтительным образом, выполнены с трапециевидным поперечным сечением, при рассмотрении в радиальном направлении, при этом выпуклости на расположенной радиально снаружи и расположенной радиально внутри поверхности выступов при этом определении не принимаются во внимание.
В соответствии с этим впадины в радиальном направлении также предпочтительным образом имеют трапециевидное поперечное сечение.
Как уже упоминалось выше, один аспект изобретения заключается в том, чтобы доработать вышеназванный хирургический инструмент таким образом, чтобы он имел более подвижное использование и расширенную рабочую область. Этого можно достичь за счет предусмотренной на дистальном концевом участке зоны сочленения.
Предлагаемый хирургический инструмент предпочтительным образом оснащен управляющим элементом с двумя или более расположенными по меньшей мере по существу от проксимального к дистальному концевому участку инструмента, передающими силы тяги и/или давления продольными элементами. Продольные элементы при этом расположены в направлении по окружности инструмента, по существу на равномерном угловом расстоянии друг от друга.
Кроме того, предпочтительны передающие силы продольные элементы, прочно соединенные между собой в направлении по окружности своим проксимальным и дистальным концом. Проксимальный концевой участок при такой форме осуществления, предпочтительным образом, также имеет зону сочленения.
По причине такого выполнения хирургического инструмента только на проксимальном концевом участке могут возникать поворотные движения, которым затем соответствуют поворотные движения на дистальном концевом участке. Согласование поворотных движений на проксимальном и дистальном концевом участке достигается за счет управляющего элемента и передающего его усилие продольного элемента.
В отличие от известных из уровня техники инструментов вместо прямолинейной или стационарной изогнутой конфигурации возможна по потребности прямолинейная или устанавливаемая изогнутая конфигурация, которая также может варьироваться в заданных границах еще во время хирургического применения при операции.
Если используются два передающих усилие продольных элемента, то поворотное движение ограничивается одной плоскостью. Если используется большее количество, прежде всего четыре или более, например восемь, передающих усилие продольных элементов, то имеется возможность отклонения хирургического инструмента в двух расположенных перпендикулярно друг другу плоскостях или же, прежде всего при использовании восьми или более управляющих элементов, практически в любых выбранных плоскостях.
Поворотные движения при этом не ограничены углом 20°, а вполне могут достигать значений свыше 90°.
В предпочтительной форме осуществления изобретения инструмент оснащен управляющим элементом, который включает в себя выполненную в виде полого цилиндра деталь, стенка цилиндра которой разделена по меньшей мере в области участка между проксимальным и дистальным концом на два или более сегмента стенки, которые образуют передающие усилие продольные элементы.
При этом два или более сегмента стенки могут быть прочно соединены друг с другом на дистальном конце выполненной в виде полого цилиндра детали посредством кольцевого пояска.
Кроме того, два или более сегмента стенки прочно соединены друг с другом в области проксимального конца выполненной в виде полого цилиндра детали.
Особо предпочтительно, чтобы выполненная в виде полого цилиндра деталь была выполнена монолитно. Здесь сборка инструмента выполняется особо просто. Кроме того, монолитная деталь может быть изготовлена с особой точностью относительно противоположной ориентации сегментов стенки.
Инструменты этой формы осуществления оснащены, прежде всего, выполненной в виде полого цилиндра деталью, которая изготовлена из единственной трубочки, при этом разделение стенки цилиндра на сегменты стенки, предпочтительным образом, происходит при помощи резания лазерным лучом.
В качестве материала для изготовления управляющего элемента, прежде всего выполненной в виде полого цилиндра детали, прежде всего, подходят стальные сплавы или нитинол.
В особо предпочтительной форме осуществления изобретения, кроме того, используется внутренний, выполненный в виде полого цилиндра стержень, который может быть выполнен как приводной элемент инструмента. Таким образом, остается максимально большая внутренняя ширина в свету, например, для отвода выводимых из инструмента частей ткани подвергаемого терапии пациента. Такой внутренний стержень может направлять передающие усилие продольные элементы в радиальном направлении и может иметь зону сочленения, которая в продольном направлении расположена соответственно положению зоны сочленения в области дистального концевого участка внешнего стержня. Кроме того, зона сочленения внутреннего стержня может иметь по существу ту же длину, что и зона сочленения внешнего стержня.
Приводной элемент имеет в такой предпочтительной форме осуществления более двух гибких участков, которые в собранном состоянии инструмента расположены соответственно в проксимальной и дистальной зонах сочленения внешнего стержня. Таким образом достигается, что типичное вращательное приводное движение также может передаваться на подсоединенный к дистальному концевому участку инструмент в состоянии под углом.
Наряду с первоначально названными режущими, абразивными и фрезеровочными инструментами также могут использоваться сверлильные инструменты, при этом в таком случае инструмент вместо одного бокового отверстия на своем дистальном конце имеет отверстие в аксиальном направлении для прохождения бурового инструмента.
Для достижения здесь максимально эффективной передачи крутящего момента приводной элемент по существу выполнен крутильно-жестким.
Также и внешний стержень, предпочтительным образом, выполнен крутильно-жестким для того, чтобы при эксплуатации инструмента принимать на себя возникающие силы реакции и избежать скручивания инструмента. Скручивание инструмента могло бы иметь следующее последствие: инструмент переместился бы со своего, соответственно, предусмотренного места применения. Эффект, который при требующих высокой точности выполнения операциях, мог бы привести к существенным осложнениям.
В еще одной форме осуществления настоящего изобретения зоны сочленения выполнены изгибно-упругими, за счет чего в хирургическом инструменте при исчезновении усилий, которые вызывают поворотное движение на проксимальном конце, обеспечивается возврат к прямой форме.
Передающие усилие продольные элементы в одном из вариантов настоящего изобретения расположены на латеральном расстоянии друг от друга, так что они при поворотном движении не трутся друг о друга и тем самым поворотное движение может осуществляться с минимальными силовыми затратами.
В качестве альтернативы, между расположенными на латеральном расстоянии друг от друга продольными элементами может быть, соответственно, расположен распорный элемент, благодаря чему положение в направлении по окружности продольных элементов также остается по существу неизменной даже при необходимости приложения более значительных сил для осуществления поворотного движения.
В качестве альтернативы, может быть предусмотрено, что передающие усилие продольные элементы были расположены в продольном направлении по меньшей мере частично в прямом контакте друг с другом. Также и здесь обеспечивается, что продольные элементы, при рассмотрении в направлении по окружности, также остаются на своих положениях при приложении силы и тем самым может быть достигнуто точное управление движением поворота дистального конца.
Кроме того, предпочтительным образом передающие усилие продольные элементы проходят от внешнего и внутреннего стержня в радиальном направлении, что ведет к дальнейшему улучшению точности осуществляемого на дистальном конце поворотного движения.
Согласно еще одной форме осуществления настоящего изобретения может быть предусмотрено, что в предусмотренном для применения согласно изобретению управляющем элементе дистальные концы продольных элементов зафиксированы в направлении вокруг окружности в угловых положениях, которые отличаются от угловых положений, в которых зафиксированы, соответственно, относящиеся сюда проксимальные концы.
Это допускает осуществление поворотных движений дистального конца в другой плоскости, нежели та, в которой осуществляется поворотное движение проксимального конца.
Разность углов, в которой зафиксированы угловые положения дистального и проксимального концов продольного элемента, может находиться в диапазоне от примерно 10° до примерно 350°. Особенный интерес представляют разности в положениях углов на проксимальном и дистальном конце в диапазоне от примерно 45° до примерно 315°, еще предпочтительнее в диапазоне от примерно 150° до примерно 210°.
Для того чтобы это достичь, передающие усилие продольные элементы предпочтительным образом расположены по меньшей мере участками в форме спиральной линии.
Принимая во внимание типичную длину хирургического инструмента и следующую из этого длину продольных элементов и одновременно относительно небольшого диаметра, образуются установочные углы продольных элементов на их спиральной траектории, которые в очень небольшом объеме отличаются от аксиального направления инструмента. Это означает, что также при очень большом угловом смещении, например на 180°, обеспечивается надежное использование инструмента и, прежде всего, поворотное движение дистального конца также может осуществляться с угловой точностью и предсказуемо.
В еще одной форме осуществления изобретения может быть предусмотрено, что передающие усилие продольные элементы в области проксимального и/или дистального концевого участка расположены с по существу параллельным направлением относительно продольной оси инструмента.
В качестве альтернативы один или несколько участков также могут быть расположены параллельно продольному направлению инструмента.
Также и здесь, принимая во внимание типичную длину необходимого управляющего элемента обычно более 10 см, и при типичном диаметре инструмента в размере нескольких миллиметров образуется чрезвычайно высокий ход спирали или, иными словами, очень маленькое отклонение от параллельности относительно продольной оси инструмента, которая составляет всего несколько угловых градусов вплоть до доли углового градуса.
Согласно варианту предлагаемого инструмента передающие усилие продольные элементы выполнены в форме кабеля или проволоки.
В других вариантах передающие усилие продольные элементы имеют поперечное сечение в форме банана.
Как уже было упомянуто ранее, в особо предпочтительной форме осуществления передающие усилие продольные элементы состоят из выполненной в виде полого цилиндра детали, у которой, например, при помощи резания лазерным лучом стенка цилиндра на большей ее части, прежде всего почти по всей длине в аксиальном направлении к конструкции передающих усилие продольных элементов, имеет прорези. Продольные элементы при этом состоят из сегментов стенки цилиндра, которые в поперечном сечении имеют форму полукруглой арки.
Предпочтительным образом, сегменты стенок имеют в поперечном сечении форму полукруглой арки, которая соответствует углу изгиба от примерно 20° или более, прежде всего 30° или более.
Количество сегментов стенки составляет предпочтительным образом от 4 до 16, еще более предпочтительно от 6 до 12.
Расстояние между сегментами стенки в направлении по окружности (соответствует ширине прорезей) составляет при измерении в угловых градусах предпочтительным образом от примерно 2° до 15°, еще более предпочтительно от примерно 4° до примерно 8°.
Ширина прорезей, которая образуется при резке лазерным лучом, может при необходимости быть увеличена, так что остающиеся полосовые сегменты стенки могут перемещаться относительно друг друга без соприкосновения. По причине поперечных сечений продольных элементов в форме кругового сегмента состояние продольных сегментов без соприкосновения остается также в случае нагрузки растяжения или давления, в том числе в областях сочленения, это действительно, прежде всего, при прохождении продольных сегментов в радиальном направлении между внутренним и внешним стержнем.
Оба концевых участка выполненного в виде полого цилиндра элемента остаются без прорезей, так что продольные элементы могут быть соединены между собой кольцевыми поясками.
Внешний стержень может иметь вторую зону сочленения, при этом одна из зон сочленения расположена проксимально, а другая зона сочленения - дистально.
Проксимальная и дистальная зоны сочленения инструмента могут быть реализованы различными способами.
Внутренний стержень может быть расположен между приводным элементом и внешним стержнем или может представлять собой приводной элемент.
Если внутренний стержень используется как приводной элемент, то у него впереди в области зон сочленения имеются гибкие участки, которые могут быть достаточными для реализации проксимальной и дистальной зон сочленения. Это означает, что внешний стержень на концевых участках должен быть соответствующим образом гибким для того, чтобы при необходимости следовать инициированным управляющим элементом поворотным движениям.
Закрепление среднего участка может обеспечиваться за счет устойчивого к изгибам выполнения внутреннего и/или внешнего стержня.
В качестве альтернативы, как внутренний, так и внешний стержень в области проксимальной и дистальной зон сочленения могут иметь проксимальный и дистальный участок сочленения, при этом использовании внутреннего стержня в качестве приводного элемента его гибкие участки соответствуют проксимальному или же дистальному подвижному участку.
Предпочтительным образом, зоны сочленения внешнего и/или внутреннего стержня в направлении по окружности оснащены несколькими прорезями, которые отделены друг от друга участками стенки в направлении по окружности или же в аксиальном направлении.
Предпочтительным образом соответствующий участок стенки в направлении по окружности имеет две или более, прежде всего три или более, прорези, расположенные друг за другом. При этом прорези предпочтительным образом расположены в направлении по окружности на равном расстоянии относительно друг друга.
В аксиальном направлении зоны сочленения предпочтительных инструментов имеют три или более прорези, расположенные рядом друг с другом, при этом предпочтительным образом находящиеся рядом друг с другом прорези расположены со смещением относительно друг друга в направлении по окружности. Расстояния, на которых прорези в аксиальном направлении расположены относительно друг друга, могут быть одинаковыми или различными, при этом таким образом может быть оказано воздействие на свойства сочленения, прежде всего на радиус изгиба.
Обычно предусмотрено, что прорези представляют собой полностью пронизывающие стенку цилиндра прорези. Хорошие свойства сгибания, впрочем, тоже могут быть достигнуты, если прорези не полностью пронизывают стенку стержня, а заканчиваются, прежде всего, до достижения внутреннего контура. Таким образом стенка стержня остается в целом закрытой, что в отдельных случаях применения, прежде всего в случае внешнего стержня, может быть желательным.
Предпочтительная геометрия прорези присутствует, если ограничивающие прорези поверхности стенки расположены под острым углом к радиальному направлению. Предпочтительным образом, при этом расположенные напротив друг друга поверхности стенок одной и той же прорези расположены симметрично, так что на внешнем контуре стержня образуется большая ширина прорези, чем рядом с внутренним контуром.
Предпочтительным образом, расположенные на расстоянии друг от друга в аксиальном направлении прорези расположены с наложением друг на друга в направлении по окружности, однако со смещением относительно друг друга, так что образуется равномерное расположение прорезей.
Поверхности стенок прорезей могут при этом быть наклонены относительно аксиального направления под углом, который отличается от 90°, в результате чего ширина прорези по внешнему контуру больше, чем по внутреннему контуру внешнего стержня. Таким образом, также при небольшой ширине прорези могут быть реализованы большие углы поворота, без необходимости увеличения количества прорезей или же распространения области сочленения на большую аксиальную длину.
В то время как во многих случаях проксимальная и дистальная зоны сочленения выполнены одинаково и, прежде всего, имеют одинаковое распространение в продольном направлении инструмента, это не является строго обязательным.
Прежде всего, может быть предусмотрено, что проксимальная и дистальная зоны сочленения различны, прежде всего также имеют различную длину. За счет этого может быть, например, достигнуто, что соответствующее поворотное движение проксимальной зоны сочленения сказывается на меньшем или усиленном поворотном движении на дистальном концевом участке инструмента.
Прежде всего, может быть предусмотрено, чтобы поворотное движение проксимальной и/или дистальной зоны сочленения могло устанавливаться. Это может произойти, например, за счет того, что расположение проксимальной и/или дистальной зоны сочленения варьируется и тем самым изменяется характер поворота обеих зон сочленения относительно друг друга.
Прежде всего, может быть предусмотрено, что инструмент включает в себя держатель, при помощи которого части зоны сочленения могут фиксироваться с высокой прочностью на изгиб относительно среднего участка или примыкающего к проксимальному или дистальному концевому участку инструмента функционального узла.
Так, в одном из вариантов предлагаемого инструмента держатель может включать в себя перемещаемую параллельно продольной оси прочного при изгибе среднего участка жесткую на изгиб втулку. В зависимости от положения втулки в продольном направлении относительно среднего участка может быть оказано влияние на длину проксимального и/или дистального концевого участка и предусмотренной там зоны сочленения и тем самым, при необходимости, на ее поворотную характеристику.
Предпочтительным образом, при этом закрепленная втулка расположена на внешнем контуре жесткого на изгиб стержня, так что не только просвет управляющего устройства остается незатронутым, но также положение втулки является легко изменяемым и, прежде всего, также определяемым.
Согласно другому варианту держатель на функциональном узле, который соединен с проксимальным концом управляющего устройства, может включать в себя опорный фиксирующий элемент. Таким образом, на зону сочленения в отношении его характера поворота может быть оказано влияние со стороны проксимального конца.
Согласно еще одному варианту предлагаемого инструмента держатель выполнен с возможностью позиционирования и, предпочтительным образом, также установки. Таким образом, имеется возможность первоначально или повторно установить воспроизводимый и точно задаваемый характер поворота дистального и проксимального концевого участка относительно друг друга.
Эти и прочие преимущества настоящего изобретения в дальнейшем поясняются более подробно на последующих примерах. На чертежах показаны:
Фигура 1А перспективное изображение предлагаемого хирургического инструмента в форме шейвера,
Фигура 1Б изображение шейвера согласно фиг.1А в разрезе,
Фигура 2 еще одна форма осуществления предлагаемого инструмента,
Фигура 3А, Б и В внешний стержень, управляющий элемент, а также внутренний стержень предлагаемого инструмента согласно фиг.2,
Фигура 3Г альтернативная форма осуществления управляющего элемента согласно фиг.3Б,
Фигура 3Д и Е две альтернативные формы осуществления подвижных участков для внешнего стержня фиг.3А,
Фигура 4А и Б альтернативные формы осуществления управляющего элемента для предлагаемого хирургического инструмента фиг.3Б,
Фигура 5 деталь гибкого приводного элемента инструмента фиг.1Б,
Фигура 6 схематическое изображение первого усовершенствования предлагаемого инструмента согласно фиг.2, и
Фигура 7А и Б схематическое изображение второго усовершенствования предлагаемого хирургического инструмента согласно фиг.2.
На фигуре 1А показан предлагаемый хирургический инструмент в форме шейвера 10 с выполненным в виде полого цилиндра внешним стержнем 11, который разделяется на проксимальный концевой участок 12, прямой, жесткий на изгиб средний участок 14, а также расположенный под небольшим углом дистальный концевой участок 16 с зоной 18 сочленения, к которому подсоединен, прежде всего также приформован, инструмент 19, например сверлильный, режущий, абразивный или фрезеровочный инструмент.
Угол, на который дистальный концевой участок 16 отклоняется от продольного направления среднего участка 14 инструмента 10, может изменяться благодаря зоне 18 сочленения. Это существенно облегчает работы в труднодоступных рабочих положениях.
За счет вращения вокруг продольной оси среднего участка 14, который обычно вводят в троакар, инструмент может охватывать дополнительную рабочую область, которая существенно расширена по отношению к ранее известному прямолинейному варианту выполнению инструмента.
В выполненном в виде полого цилиндра стержне 11 вставлен установленный с возможностью вращения, предпочтительным образом выполненный в виде полого цилиндра, приводной элемент 20.
К приводному элементу на его дистальном конце 21 подсоединен инструмент 22, который, так же как и внешний стержень 11, имеет боковое отверстие. Как видно на фиг.1Б, отверстия обточены по краям и оснащены режущими кромками. Если приводной элемент 20 смещается при вращении, то попадающие в область боковых отверстий части тканей отделяются за счет режущих кромок краев отверстий и могут быть вытянуты через оставшееся в выполненном в виде полого цилиндра приводном элементе 20 внутреннее пространство посредством разрежения.
На дистальном концевом участке 16 шейвера 10, то есть в области зоны 18 сочленения, выполненный в виде полого цилиндра приводной элемент 20 переходит из монолитной или массивной, выполненной в виде полого цилиндра детали в выполненный в виде полого цилиндра гибкий участок 23, который образован из множества кольцевых сегментов 24, которые впоследствии еще будут описаны более подробно на примере фигуры 5.
Дистальный конец приводного элемента 20 обычно заканчивается соединительным элементом 25, к которому в свободном зацеплении может быть подсоединен инструмент, прежде всего фрезеровочный инструмент 22.
Таким образом фрезеровочный инструмент 22 может быть легко заменяем, например в случае износа, или заменен новым или, при необходимости, другим инструментом. В качестве альтернативы, инструмент 22 может быть жестко и без возможности утери соединен с дистальным концом 21 приводного элемента 20.
Установка угла, под которым дистальный концевой участок 16 наклонен относительно среднего участка, может быть выполнена за счет самих по себе известных управляющих элементов, например тросов Боудена. Эта деталь на фигуре 1Б не показана.
Дистальный конец инструмента 10 показан на фигурах 1А и 1Б, соответственно закрытым с боковым отверстием. Если вместо фрезеровочного инструмента предусмотрен сверлильный инструмент, то вместо бокового отверстия предусмотрено отверстие в аксиальном направлении, которое высвобождает сверлильный инструмент на дистальном конце в аксиальном направлении (не показано).
Согласно настоящему изобретению хирургический инструмент, предпочтительно, оснащен как проксимальной, так и дистальной зоной сочленения, как это показано на примере шейвера 30 фиг.2, и подлежит обсуждению в дальнейшем.
Предлагаемый шейвер 30 оснащен стержнем, который разделен на проксимальный концевой участок 31, жестким на изгиб средним участком 32, а также дистальным концевым участком 33.
На дистальный концевой участок 33 присоединен или приформован инструмент 34, который по своей конструкции может соответствовать, например, описанному в DE 102004046539 A1.
Проксимальный и дистальный концевые участки 31, 33 инструмента 30 включают в себя соответственно зоны 35, 36 сочленения, которая допускает поворотное движение проксимального концевого участка 31, которое благодаря управляющему элементу инструмента 30 позволяет осуществлять поворотное движение дистального концевого участка 33 на участке 36 сочленения. Таким образом, шейвером 30 фигуры 2 можно работать как в прямом направлении с легким отклонением дистального концевого участка 33, а также с существенным отклонением, например почти перпендикулярным отклонением концевого участка 33, что обеспечивает инструменту существенно увеличенную рабочую область, а также обеспечивает доступ к труднодоступным рабочим положениям.
Конструкция предлагаемого шейвера 30 еще подробнее разъясняется в деталях на основании детализированных фигур на фигурах 3А-3В.
На фигуре 3А показан внешний, выполненный в виде полого цилиндра стержень 40 с проксимальным концевым участком, который включает в себя концевой участок 42 и примыкающий к нему проксимальный гибкий участок 44, примыкающим к нему затем в направлении к дистальному концу 52 жесткому на изгиб средним участком 46, за которым на дистальном концевом участке 48 сначала следует гибкий участок 50, к которому затем присоединен или приформован инструментальный компонент. В настоящем случае инструментальный компонент приформован к дистальному концу внешнего стержня 40.
В этот внешний стержень 40 затем вставлен показанный на фигуре 3Б управляющий элемент 60, который оснащен несколькими, в данном случае восемью, расположенными параллельно продольному направлению инструмента, передающими усилие продольными элементами 62, например в форме кабелей или проволок.
Продольные элементы 62 соединены друг с другом на их проксимальных и дистальных концах в направлении по окружности в кольцевой поясок 64, 66. Длина управляющего элемента 60 простирается, как видно из сравнения изображения на фигурах 3А и 3Б, от проксимального подвижного участка 44 внешнего стержня 40 до дистального подвижного участка 50 внешнего стержня 40.
На фигуре 3Г показана альтернативная форма осуществления управляющего элемента 60′, который изготовлен из монолитной трубочки 61, например, за счет резания лазерным лучом.
Образованные в трубочке 61 за счет резания лазерным лучом прорези 63 проходят почти по всей длине трубочки 61, так что только на проксимальном и дистальном концах остаются не имеющие прорезей кольцевые пояски 64′, 66′, которые, соответствующим образом, соединяют друг с другом передающие усилие, функционирующие в качестве продольных элементов сегменты 65 стенок.
Наконец, вовнутрь выполненного в виде полого цилиндра управляющего элемента 60 вставляют внутренний выполненный в виде полого цилиндра стержень 80, как он показан на фигуре 3В.
Также внутренний стержень 80 на проксимальном конце включает в себя подвижный участок или гибкий участок 82, а также жесткий на изгиб средний участок 84, и дистальный подвижный участок или гибкий участок 86. К дистальному подвижному участку 86 подсоединен инструментальный компонент 88, который, после того, как внутренний стержень 80 вставлен насквозь через управляющий элемент 60 во внешний стержень 40, расположен в том же положении, что и инструментальный компонент на дистальном конце 52 внешнего стержня 40.
В соответствии с предпочтительной формой осуществления изобретения предусмотрено, чтобы внутренний стержень 80 одновременно функционировал как приводной элемент, так чтобы при вращательном движении в этом случае взаимодействовали инструментальные компоненты 88 и 52 и, например, могли удалять вступающие в контакт в этой области части тканей за счет резательной, абразивной или фрезеровочной функции.
Так как внутренний стержень 80 имеет свободный просвет, такие части ткани могут транспортироваться через просвет внутреннего стержня 80 наружу к проксимальному концевому участку 42 и отводиться.
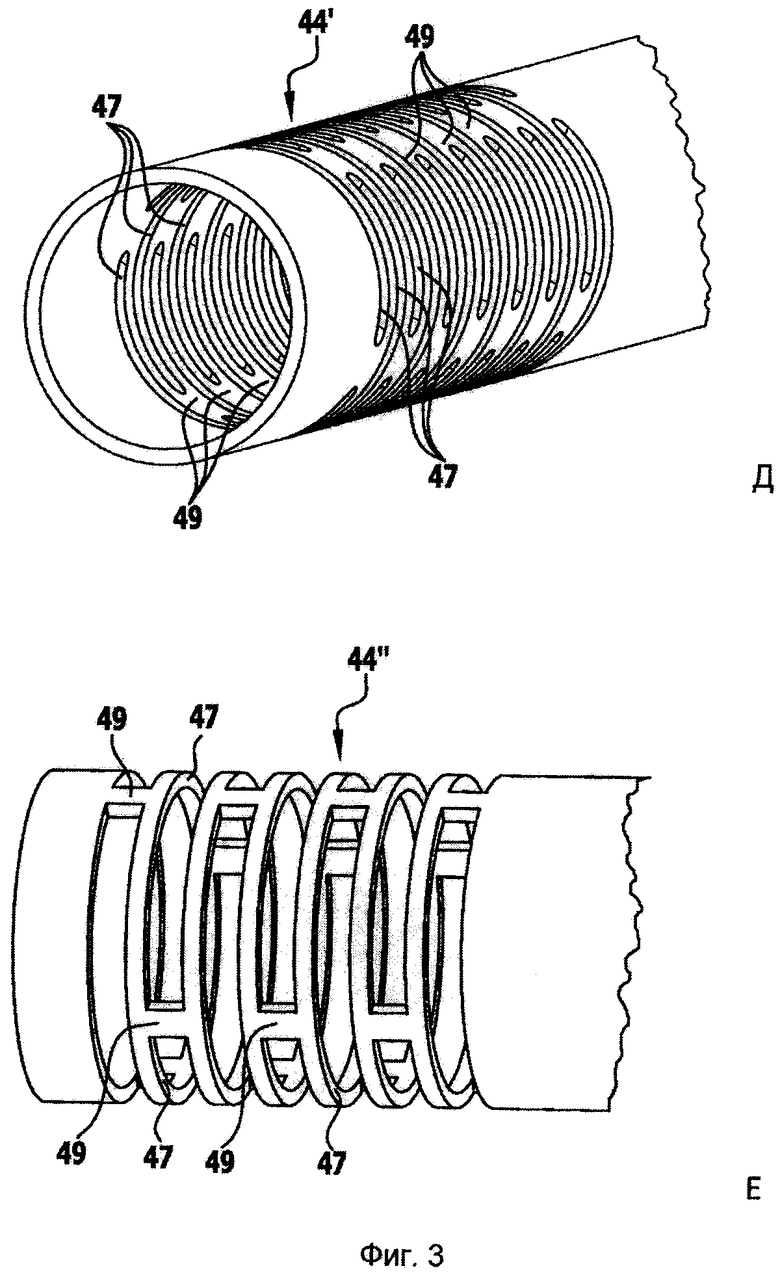
Конструкция подвижных участков в форме подвижных участков 44, 50 или же 82, 86 внутреннего или же внешнего стержня может быть разнообразной.
На фигурах 3Д и 3Е показаны два варианта родственных конструкций гибких участков, в данном случае в форме участков 44′ или же 44′′. Тот же самый тип конструкции также предлагается для гибкого участка 50.
Общим в обоих вариантах является использование структуры прорезей с расположенными в направлении по окружности прорезями 47 в выполненном в виде полого цилиндра стержне. Предпочтительным образом, вдоль окружной линии имеются две или более отделенные друг от друга перемычками 49 прорези. Так как расположение прорезей вдоль только одной окружной линии позволило бы иметь только очень маленький угол поворота, при типичных структурах прорезей зоны 44′ сочленения имеются несколько расположенных на расстоянии друг от друга в аксиальном направлении окружных линий с прорезями 47. Предпочтительным образом, находящиеся по соседству в аксиальном направлении прорези 47 расположены со смещением относительно друг друга в направлении по окружности, так что создаются возможности изгиба в нескольких плоскостях.
На фигуре 3Д имеются по два прорези 47 на одну окружную линию, которые отделены друг от друга перемычками 49. На фигуре 3Д имеется три прорези 47. В обоих случаях структура прорезей включает в себя несколько прорезей 47, которые расположены вдоль нескольких упомянутых и расположенных на расстоянии друг от друга окружных линий. За счет выбора структуры прорезей и количества прорезей очень легко может быть задан допустимый угол поворота, а также адаптированы к соответствующему случаю применения прочие свойства подвижного участка, такие как, например, жесткость на изгиб.
На фигуре 4А показан альтернативный управляющий элемент 90, у которого передающие усилие продольные элементы 92 своими проксимальным и дистальным концами соединены с проксимальными или же дистальными кольцевыми поясками 94, 96. В отличие от управляющего элемента 60, который показан на фигуре 3Б, передающие усилие продольные элементы 92 расположены не прямолинейно и параллельно к продольной оси управляющего элемента 90, а вдоль спиральных линий, в результате чего концы продольных элементов 92 в направлении по окружности заканчиваются с угловым смещением по отношению к кольцевым пояскам 94, 96. Угловое смещение в направлении по окружности в показанном на фигуре 4А примере осуществления составляет примерно 180°, вследствие чего поворотное движение проксимального конца инструмента приводит к поворотному движению дистального концевого участка, которое происходит в той же плоскости поворота, только в противоположном направлении. Вместо показанной на фигуре 2 S-образной формы тогда получают U-образную, расположенную под углом конфигурацию.
Возможны другие угловые разности, при угловом смещении 90° достигается, например, поворотное движение дистального концевого участка вертикально по отношению к плоскости поворота проксимального концевого участка.
На фигуре 4Б показан вариант управляющего элемента 90′, который аналогично управляющему элементу 60′ на фигуре 3Г образован из монолитной трубочки за счет резания лазерным лучом. Возникающие при этом сегменты 92′ стенки отделены друг от друга прорезями 93′ и соединены друг с другом с силовым замыканием только в области кольцевых поясков 94′, 96′. Преимущества спиральной траектории сегментов стенки те же, что и у управляющего элемента 90 со спирально расположенными продольными сегментами 92.
Кольцевые сегменты 24 приводного элемента 20 (фигура 1Б) детально показаны на фигуре 5 и имеют первую концевую область 100 в первом аксиальном направлении и вторую концевую область 102 в противоположном аксиальном направлении. В своей первой концевой области кольцевой сегмент 24 имеет шесть выступов 104, которые расположены на кольцевом сегменте 24 с равномерным распределением в направлении по окружности. В своей аксиально противоположной концевой области 102 кольцевой сегмент 24 оснащен выполненными по форме в соответствии с выступами 104 выемками или впадинами 106, при этом выступы и впадины, при рассмотрении в направлении по окружности соответственно, имеют трапециевидную форму, при этом у выступов 104 свободный в аксиальном направлении конец имеет большую протяженность в направлении по окружности, чем кольцевой сегмент на соседнем конце, в то время как в соответствии с этим выемки 106 на их внутреннем конце имеют большую протяженность в направлении по окружности, чем расположенные по направлению к концевой области 102, открытые наружу участки. В случае кольцевых сегментов 24, которые детально показаны на фигуре 5, за счет упорядоченной (регулярной) геометрии обе концевые области оснащены конструкцией, идентичной вплоть до зеркально симметричного расположения.
За счет того, что выступы 104 входят в зацепление с впадинами 106 соответствующей формы с зазором и тем не менее с геометрическим замыканием, присутствует аксиальное геометрическое замыкание, так что кольцевые сегменты 24 в аксиальном направлении соединены друг с другом и тем самым вместе вводятся во внешний стержень 11 или же могут быть из него изъяты.
Тем не менее из-за существующего зазора между выступами 104 и впадинами 106 имеется достаточный зазор для того, чтобы обеспечить подвижное соединение соседних кольцевых сегментов 24.
Выступы 104 и выемки 106 имеют соответственно входящие в контакт друг с другом контактные поверхности 108, 109, которые в показанном на фигуре 5 примере осуществления выполнены плоскими по большой площади. Таким образом, возможна оптимальная передача крутящего момента между отдельными, следующими друг за другом кольцевыми сегментами.
Благодаря большому количеству выступов и впадин 104, 106 образуется несколько осей поворота для соединения двух следующих друг за другом кольцевых сегментов, так что приводной элемент 20 может повторять изогнутую траекторию выполненного в виде полого цилиндра стержня 11.
Множество входящих в зацепление друг с другом выступов и впадин 104, 106 с трапециевидной конфигурацией обеспечивают наличие особо надежного соединения в аксиальном направлении.
Для того чтобы можно было в целом без проблем манипулировать приводным элементом 20 с его гибким участком и образующими его кольцевыми сегментами 24 предусмотрено, что протяженность выступов 104 на их свободном конце радиально снаружи в направлении по окружности (a) больше, чем соответствующая ей протяженность на внутренней стороне (a′).
Соответствующим образом определены размеры выемок 106 по их внешнему и внутреннему контуру с шириной b или же шириной b′, которая делает возможным геометрическое замыкание в радиальном направлении, так что кольцевые сегменты 24 соединены друг с другом и могут использоваться без возможности потери.
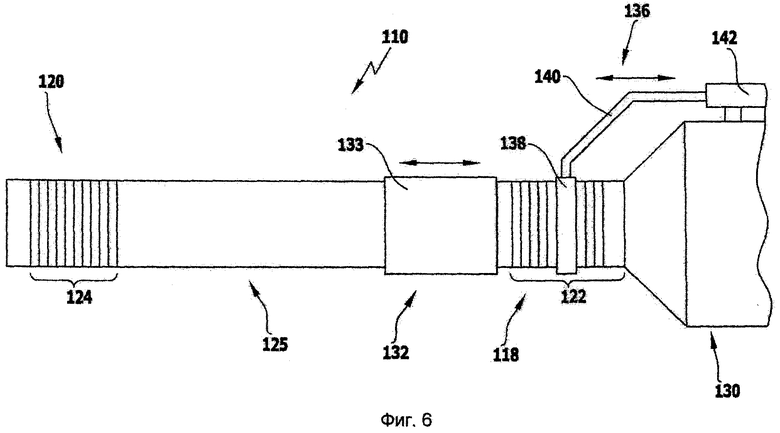
Наконец, на фигуре 6 показан вариант настоящего изобретения в первой усовершенствованной форме, в которой к инструменту 110 к его проксимальному концевому участку 118 подсоединен манипулятор 130.
Инструмент 110 имеет, как в описано в связи с фигурой 2, проксимальную и дистальную зоны 122 и 124 сочленения с по существу одинаковой длиной, так что при отклонении проксимального концевого участка 118 под углом, например, 30° также создается соответствующее отклонение дистального концевого участка 120 на 30°. Направление, в котором осуществляется отклонение дистального концевого участка 120, зависит от выбора не показанного здесь детально управляющего элемента и определения концов передающих усилие продольных элементов, как это детально было описано выше.
Показанный на фигуре 6 инструмент 110 дополнительно оснащен держателем 132 в форме втулки 133, которая расположена на внешнем стержне управляющего устройства 110, накладываясь на средний участок 125 с продольным смещением.
Если сместить втулку 133 в направлении проксимального концевого участка 118 и обеспечить наложение втулки 133 на эту зону 122 сочленения, то зона 122 сочленения сократится, за счет чего ограничится ее максимальный угол изгиба. Таким образом, допустимый угол изгиба в области дистального концевого участка 120 может устанавливаться различно, в результате чего, например, при эндоскопическом удалении патологических структур определенная рабочая область может быть установлена под визуальным контролем оператора.
На фигуре 6 показано альтернативное решение в отношении держателя 132 в форме держателя 136, которое включает в себя кольцо 138, которое над дважды изогнутой перемычкой 140 с прямолинейной направляющей 142 закреплено с продольным смещением к манипулятору 130. За счет изменения положения кольца 138 вдоль участка 118, как разъяснено выше в отношении втулки 133, имеющаяся в наличии для движения изгиба проксимального концевого участка часть зоны 122 сочленения может быть сокращена, так что снова допускается только ограниченный угол изгиба на стороне дистального концевого участка 120. Зоны сочленения могут быть выполнены, как подробно описано выше.
Кроме того, возможно, что как в случае втулки 133, так и в случае кольца 138 может быть осуществлена фиксация в заданной позиции, то есть с заданным наложением зоны сочленения, так что обеспечивается установленная ограниченная рабочая область на стороне дистального концевого участка 120.
С другой стороны, возможно, что втулка 133 также перемещается в направлении дистального подвижного участка 120, при этом затем при соответствующем поворотном движении проксимального концевого участка 118 происходит переданное в другом соотношении, то есть усиленное поворотное движение в области дистального концевого участка 120.
Также возможно, что предусмотрены маркировки для позиции втулки 133, или же кольца 138, или его прямолинейной направляющей 142, так чтобы однажды найденное угловое ограничение также могло бы и в дальнейшем снова точно устанавливаться.
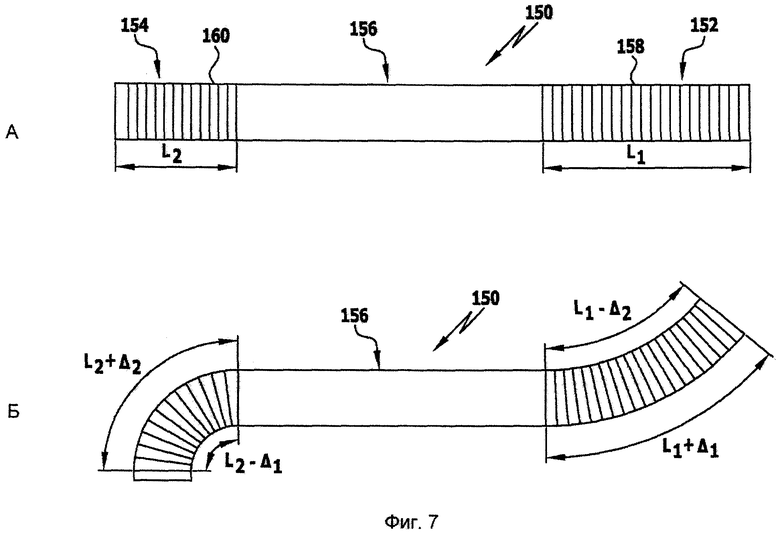
Для разъяснения вышеописанного эффекта усиления поворотного или изгибного движения на дистальном конце следует также сослаться на фигуру 7, на которой показан инструмент 150, который имеет проксимальный концевой участок 152, дистальный концевой участок 154, а также расположенный между ними средний участок 156. В то время как средний участок 156 имеет жесткую на изгиб конструкцию, проксимальный и дистальный концевые участки 152, 154 соответственно содержат зону сочленения 158 или же 160 с измеренной в аксиальном направлении длиной L1 или же L2.
Длина L2 при этом выбрана более короткой, чем длина L1. На фигуре 7А показан инструмент 150 в исходном положении, в котором на проксимальный концевой участок 152 не воздействуют силы.
Если проксимальный концевой участок 152 выворачивается из аксиального направления, как это поясняется на изображении фигуры 7В, то в проксимальной зоне 158 сочленения по внешнему радиусу изогнутой концевой области 152 образуется увеличенная длина зоны 158 сочленения L1+Δ1, а по внутреннему радиусу - сокращенная длина L1-Δ2. Соответствующие изменения в длинах возникают для дистального концевого участка 154 с длиной по внешнему радиусу L2+Δ2 и длиной по внутреннему радиусу L2-Δ1. Так как длины L1 и L2 зон сочленения 158, 160 являются различными, то для дистального концевого участка 154 принудительным образом образуется усиленное движение изгиба для того, чтобы можно было следовать заданным проксимальным концевым участком изменениям в длине.
Этот эффект также может быть использован для того, чтобы, например, сделать возможными в проксимально ограниченной рабочей области со сравнительно небольшими поворотными движениями полноценное использование дистально заданного радиуса поворотов и дистально сделать доступной максимально большую рабочую область.
Этот принцип может различным образом использоваться с помощью настоящего изобретения тем, что за счет держателя (см. фигуру 6) длину одной зоны сочленения варьируют по сравнению с другой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ | 2010 |
|
RU2506883C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ШАРНИРНО-ПОВОРАЧИВАЕМЫМИ КОМПОНЕНТАМИ | 2009 |
|
RU2489100C2 |
| ШАРНИРНО-ПОВОРОТНЫЕ ЗАГРУЗОЧНЫЕ МОДУЛИ ДЛЯ ХИРУРГИЧЕСКИХ СШИВАЮЩИХ СКОБКАМИ И ОТРЕЗНЫХ ИНСТРУМЕНТОВ | 2009 |
|
RU2491027C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С МЕХАНИЗМОМ ЗАПУСКА, ЧУВСТВИТЕЛЬНЫМ К НАГРУЗКЕ | 2009 |
|
RU2499567C2 |
| ЭНДОСКОПИЧЕСКИЙ ХИРУРГИЧЕСКИЙ АППАРАТ С РУКОЯТКОЙ, КОТОРАЯ СПОСОБНА К ШАРНИРНОМУ ПОВОРОТУ ОТНОСИТЕЛЬНО СТЕРЖНЯ | 2007 |
|
RU2460478C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО, ПЕРЕДАЮЩЕЕ КРУТЯЩИЙ МОМЕНТ, СОДЕРЖАЩЕЕ СОЕДИНЕННЫЙ С НИМ ИНСТРУМЕНТ | 2013 |
|
RU2671938C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО, ПЕРЕДАЮЩЕЕ КРУТЯЩИЙ МОМЕНТ, СОДЕРЖАЩЕЕ СОЕДИНЕННЫЙ С НИМ ИНСТРУМЕНТ | 2013 |
|
RU2641837C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО, ПЕРЕДАЮЩЕЕ КРУТЯЩИЙ МОМЕНТ, СОДЕРЖАЩЕЕ СОЕДИНЕННЫЙ С НИМ ИНСТРУМЕНТ | 2013 |
|
RU2648227C2 |
| ПНЕВМОПРИВОДНОЙ ХИРУРГИЧЕСКИЙ ОТРЕЗНОЙ И ФИКСИРУЮЩИЙ АППАРАТ С ЕМКОСТЬЮ ХРАНЕНИЯ УВЕЛИЧЕННОГО ОБЪЕМА | 2007 |
|
RU2477087C2 |






Изобретение относится к медицине. Хирургический инструмент с проксимальным и дистальным концевыми участками и простирающимся между ними средним участком включает в себя удлиненный, полый, простирающийся от проксимального концевого участка к дистальному концевому участку внешний стержень, установленный с возможностью вращения внутри внешнего стержня приводной элемент, а также расположенный на дистальном концевом участке инструмента, соединенный с приводным элементом сверлильный, режущий, абразивный или фрезеровочный инструмент. Приводной элемент имеет расположенный между проксимальным и дистальным концевыми участками инструмента гибкий участок, включающий в себя несколько кольцевых сегментов, каждый из которых имеет первый и второй отстоящие друг от друга в аксиальном направлении концевые участки, из которых первый концевой участок включает в себя два или более выдающихся в аксиальном направлении выступа, а второй концевой участок - две или более принимающих выступы впадины. Кольцевые сегменты подвижно входят друг в друга выступами и впадинами. Кольцевые сегменты выступами и впадинами соединены между собой с геометрическим замыканием в аксиальном и/или радиальном направлении. Внешний стержень включает в себя расположенную в области дистального концевого участка инструмента зону сочленения, подвижно соединяющую дистальный концевой участок и средний участок инструмента между собой. Гибкий участок приводного элемента имеет длину в аксиальном направлении, которая соответствует по меньшей мере по существу длине зоны сочленения внешнего стержня в аксиальном направлении. Инструмент включает в себя расположенный во внешнем стержне управляющий элемент, при помощи которого дистальный концевой участок инструмента является отклоняемым по отношению к среднему участку. Изобретение обеспечивает уменьшение затрат на изготовление при более надежной эксплуатации, прежде всего также при высокой скорости вращения и в большом количестве различных рабочих ситуаций. 26 з.п. ф-лы, 7 ил.
1. Хирургический инструмент с проксимальным и дистальным концевыми участками и простирающимся между ними средним участком, включающий в себя удлиненный, полый, простирающийся от проксимального концевого участка к дистальному концевому участку внешний стержень, установленный с возможностью вращения внутри внешнего стержня приводной элемент, а также расположенный на дистальном концевом участке инструмента, соединенный с приводным элементом сверлильный, режущий, абразивный или фрезеровочный инструмент, причем приводной элемент имеет расположенный между проксимальным и дистальным концевыми участками инструмента гибкий участок, включающий в себя несколько кольцевых сегментов, каждый из которых имеет первый и второй отстоящие друг от друга в аксиальном направлении концевые участки, из которых первый концевой участок включает в себя два или более выдающихся в аксиальном направлении выступа, а второй концевой участок - две или более принимающих выступы впадины, причем кольцевые сегменты подвижно входят друг в друга выступами и впадинами, отличающийся тем, что:
- кольцевые сегменты выступами и впадинами соединены между собой с геометрическим замыканием в аксиальном и/или радиальном направлении;
- внешний стержень включает в себя расположенную в области дистального концевого участка инструмента зону сочленения, подвижно соединяющую дистальный концевой участок и средний участок инструмента между собой, при этом гибкий участок приводного элемента имеет длину в аксиальном направлении, которая соответствует по меньшей мере по существу длине зоны сочленения внешнего стержня в аксиальном направлении;
- инструмент включает в себя расположенный во внешнем стержне управляющий элемент, при помощи которого дистальный концевой участок инструмента является отклоняемым по отношению к среднему участку.
2. Инструмент по п.1, отличающийся тем, что выступы и впадины расположены на равномерном расстоянии в направлении по окружности на соответствующем кольцевом сегменте.
3. Инструмент по п.1 или 2, отличающийся тем, что количество выступов и впадин является нечетным.
4. Инструмент по п.1, отличающийся тем, что выступы и/или впадины в направлении по окружности выполнены в форме трапеции.
5. Инструмент по п.1, отличающийся тем, что выступы и/или впадины в радиальном направлении имеют трапециевидное поперечное сечение.
6. Инструмент по п.1, отличающийся тем, что выступы и впадины в направлении по окружности имеют входящие в контакт друг с другом плоские контактные поверхности.
7. Инструмент по п.1, отличающийся тем, что два соседних кольцевых сегмента образуют две или более оси сочленения.
8. Инструмент по п.1, отличающийся тем, что управляющий элемент включает в себя два или более передающих усилие продольных элемента, которые в направлении по окружности внешнего стержня расположены с равномерным распределением и простираются от проксимального концевого участка до дистального концевого участка инструмента.
9. Инструмент по п.8, отличающийся тем, что внешний стержень на проксимальном концевом участке включает в себя вторую зону сочленения и что передающие усилие продольные элементы на их соответствующих проксимальных и дистальных концах прочно соединены друг с другом в направлении по окружности.
10. Инструмент по п.8, отличающийся тем, что передающие усилие продольные элементы выполнены в форме кабелей или проволоки.
11. Инструмент по п.8, отличающийся тем, что передающие усилие продольные элементы имеют поперечное сечение в форме банана.
12. Инструмент по п.1, отличающийся тем, что управляющий элемент включает в себя выполненную в виде полого цилиндра деталь, стенка цилиндра которой по меньшей мере в области участка между проксимальным и дистальным концом разделена на два или более сегмента стенки, которые образуют передающие усилие продольные элементы.
13. Инструмент по п.12, отличающийся тем, что два или более сегмента стенки прочно соединены друг с другом на дистальном конце выполненной в виде полого цилиндра детали кольцевым пояском.
14. Инструмент по п.12, отличающийся тем, что два или более сегмента стенки в области проксимального конца выполненной в виде полого цилиндра детали прочно соединены между собой.
15. Инструмент по п.8, отличающийся тем, что передающие усилие продольные элементы латерально расположены на расстоянии друг от друга.
16. Инструмент по п.15, отличающийся тем, что между передающими усилие продольными элементами расположен распорный элемент.
17. Инструмент по п.8, отличающийся тем, что управляющий элемент выполнен жестким на скручивание.
18. Инструмент по п.1 или 9, отличающийся тем, что зона (зоны) сочленения внешнего стержня выполнена (выполнены) изгибно-упругими.
19. Инструмент по п.1, отличающийся тем, что инструмент, кроме того, имеет внутренний, выполненный в виде полого цилиндра стержень, который направляет передающие усилие продольные элементы в радиальном направлении и имеет зону сочленения, причем зона (зоны) сочленения внешнего и/или внутреннего стержня включают в себя участок стенки, на котором находятся несколько расположенных на расстоянии друг от друга, проходящих в направлении по окружности прорезей.
20. Инструмент по п.8, отличающийся тем, что инструмент, кроме того, имеет внутренний, выполненный в виде полого цилиндра стержень, который направляет передающие усилие продольные элементы в радиальном направлении и имеет зону сочленения, которая в продольном направлении расположена соответственно положению зоны сочленения в области дистального концевого участка внешнего стержня.
21. Инструмент по п.19 или 20, отличающийся тем, что зона сочленения внутреннего стержня имеет по существу ту же длину, что и зона сочленения внешнего стержня.
22. Инструмент по п.19 или 20, отличающийся тем, что внутренний стержень расположен внутри приводного элемента.
23. Инструмент по п.19 или 20, отличающийся тем, что внутренний стержень расположен между приводным элементом и внешним стержнем.
24. Инструмент по п.1, отличающийся тем, что внешний стержень имеет вторую зону сочленения, при этом одна из зон сочленения расположена проксимально, а другая зона сочленения - дистально.
25. Инструмент по п.1, отличающийся тем, что приводной элемент выполнен в форме полого цилиндра.
26. Инструмент по п.25, отличающийся тем, что приводной элемент образует внутренний стержень.
27. Инструмент по п.24, отличающийся тем, что управляющий элемент проходит от расположенной проксимально зоны сочленения до расположенной дистально зоны сочленения.
| US5921956 A, 13.07.1999 | |||
| US2004243143 A1, 02.12.2004 | |||
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| Устройство для рассечения тканей | 1977 |
|
SU707579A1 |
| Устройство для обработки криволинейных каналов в костной ткани | 1988 |
|
SU1600747A1 |
| DE102004046539 A1, 13.04.2006 | |||
| EP0677276 A1, 18.10.1995 | |||
| DE102004046539 A1, 13.04.2006 | |||
| Устройство для смазки швейной машины | 1981 |
|
SU986989A1 |

