Изобретение относится к системе активной и пассивной стабилизации судна в соответствии с ограничительной частью п.1 формулы изобретения. Изобретение также относится к способам активной и пассивной стабилизации судна с помощью указанной системы, описанным соответственно в пунктах 13 и 20 формулы изобретения.
Предпосылки изобретения
В настоящее время большинство судов не снабжены активной стабилизацией, хотя для судов, работающих совместно со стационарными установками, наличие такой стабилизации желательно и только теперь стало рассматриваться как естественное и само собой разумеющееся дело. Когда судно не имеет этой характерной черты, оно должно при плохой погоде и неблагоприятных условиях волнения воды укрываться подальше, дожидаясь изменения погоды. Даже когда погодные условия относительно хороши и раскачивание судна мало, оно очень уязвимо в отношении колебательных движений и полностью в их власти. Не только для судов, таких как корабли или суда для работ на мелководье, но также для буровых вышек, платформ, кранов и тому подобному, активная стабилизация будет очень полезной. Судно без подходящей системы активной стабилизации можно сравнить с автомобилем без амортизаторов, что немыслимо по соображениям дорожной безопасности.
Как известно, морские суда находятся под воздействием движения волн и других статических нагрузок.
Из предшествующей патентной литературы, среди прочего, известно использование цистерн, которые имеют отверстия в днище, в частности, на нефтяных буровых вышках. Эти цистерны работают с использованием регулируемого клапана на их верхней части, который ведет в атмосферу. Вследствие статического перемещения, которое испытывает буровая вышка в открытом море, соотношение наполнения морской водой в цистернах можно регулировать для компенсации и уменьшения перемещения.
Другие системы, которые используются в настоящее время для устранения бортовой качки, представляют собой стабилизирующие цистерны и насосы антикреновой системы, хотя в этих случаях большая доля несущей нагрузку емкости судна не может быть использована. Кроме того, судно подвергается постоянной нагрузке без какой-либо возможности управления изменениями, например, в осадке. Насос антикреновой системы представляет собой активную насосную систему, но она часто имеет недостаточную производительность по отношению к тому, что требуется.
В известных системах, таких как эта, громадная проблема состоит в том, что при перекачивании текучей среды из одной полной цистерны в другую действующими являются две цистерны, каждая из которых заполнена наполовину балластом со свободной поверхностью текучей среды. В смысле стабильности это опасная ситуация. Другая проблема с известными системами состоит в том, что только один клапан используется для перекрывания потока текучей среды между цистернами, что приводит к нестабильности системы, в частности, в случае, если клапан заклинило в открытом положении, так что текучая среда в этих двух цистернах может свободно течь между обеими цистернами от правого борта к левому.
Из патента Великобритании 2091192 А известно судно, которое снабжено цистернами для стабилизации. Эти цистерны имеют отверстия в днище и используются для активной и пассивной стабилизации. Главный недостаток этого судна состоит в том, что для активной и пассивной стабилизации используются только сжатый воздух и накопительные цистерны с низким давлением (от 1/4 до 3/4 бар) и высоким давлением (от 3 до 7 бар), что означает, что все изменения в уровне в балластных цистернах должны происходить ниже уровня воды и только плавучесть в балластных цистернах может быть изменена. Также это означает, что доступен только ограниченный объем балласта.
Суда, выполняющие операцию постановки на якорь, часто снабжены большим машинным оборудованием и имеют большой расход дизельного топлива, так что запланированные операции могут занять значительно больше времени, чем ожидалось, что приведет к уменьшению стабильности при постепенном опорожнении топливных баков.
Существующие суда со стабилизационными цистернами уязвимы при возникновении критических ситуаций, например, при поломке двигателя или чего-нибудь в этом роде, в таких случаях, когда судно не в состоянии перемещать балласт.
Когда суда должны выполнять операцию буксировки, она выполняется путем изменения направления отклонения руля, в результате нагрузка может очень быстро переместиться с правого борта на левый, и с существующими в настоящее время системами нет возможности достаточно быстрого перемещения для стабилизации.
В связи с операциями буксировки между буксирующим судном и буксируемым объектом используют длинный буксировочный трос с грузами. Это делается для уменьшения изменений натяжения буксировочного троса вследствие постоянных изменений сопротивления волн. После каждой волны судно должно ускориться для того, чтобы восстановить скорость, которую судно имело до того, как оно ударилось о волну. Чем значительнее будет понижено это сопротивление волн, тем экономичней будет запланированная операция.
Это вообще очень желательно для снижения влияния со стороны судов на окружающую среду, равно как в отношении экономичности, так и в отношении выбросов окислов азота NОх. Это сказывается на улучшении окружающей среды и уменьшении загрязнения - важной теме в современном обществе.
Отсутствие активной стабильности по отношению к перемещению также воздействует на все суда, где людьми должен выполняться некоторый объем ручной работы. Рыболовные суда представляют пример типа судна, где может быть нанесен значительный ущерб в результате многих выполняемых вручную задач, решаемых во время ловли и обработки рыбы. Скорость стабилизации может отличаться в аварийной и в нормальной работе. Более востребована система, которая может более быстро стабилизировать и компенсировать силы, воздействующие на судно.
Многие суда сконструированы для прохождения через некоторую систему шлюзов, по протокам или мелководью, и эти суда проектируются так, что они всегда имеют малую осадку, что может вызывать проблемы со стабилизацией.
Ледоколы представляют собой суда другого типа, которые имеют корпус специальной конструкции, связанной со способностью разрушения льда. Эти суда могут нести большое количество балласта, который следует перемещать от кормы к носу судна, и это может создать неуправляемые ситуации. Перемещение балласта всегда имеет неуправляемые эффекты на всех судах.
Большое количество судов по всему миру находятся в ожидании из-за волнения на море, и при этом требуется их обслуживание. Это может приводить к излишнему загрязнению окружающей среды и излишней стоимости, так как судно должно простаивать без употребления в резерве. Поэтому очень желательно, чтобы судно было приспособлено к работе в более худших условиях, чем современные суда, при этом одновременно обеспечивалась безопасность судна и команды.
Для судов, имеющих вертолетную палубу, также требуется улучшенная стабильность и компенсация вертикальных перемещений, так как вертолет не сможет совершить посадку, если перемещения судна будут слишком велики.
Поэтому очевидно, что для большинства судов имеется потребность в наличии более быстрой и более активной стабилизации судна, чем имеются в настоящее время. Сейчас также существует нехватка систем пассивной стабилизации судов.
Цель изобретения
Главная цель изобретения состоит в создании системы и способов активной и пассивной стабилизации судна, в частности управления вертикальным перемещением всех плавающих судов/барж и буровых вышек/платформ, вызванным воздействием волн, перераспределением или перемещением груза/балласта и работой грузоподъемного крана.
Дополнительно цель изобретения состоит в уменьшении максимального перемещения, которое испытывают современные суда, то есть в уменьшении килевой качки, бортовой качки и осадки судна.
Кроме этого, цель изобретения состоит в возможности поддерживания расстояния между судном и дном моря постоянным, насколько это возможно.
И, наконец, цель изобретения состоит в том, чтобы указанные система и способы ослабили или полностью устранили упомянутые выше недостатки известных систем и привели к повышению безопасности и экипажа, и судов, работающих в условиях открытого моря, обеспеченных предложенными в изобретении системой и способами.
Сущность изобретения
Предложенная система активной и пассивной стабилизации судов, таких как корабли, суда для работ на мелководье, буровые вышки, баржи, платформы и подъемные краны, работающие в условиях открытого моря, описана в пункте 1 формулы изобретения. Предпочтительные признаки описаны в пунктах 2-12.
Предложенный способ активной стабилизации судов, таких как корабли, суда для работ на мелководье, буровые вышки, баржи, платформы и подъемные краны, работающие в условиях открытого моря, с использованием предложенной системы описан в пункте 13 формулы изобретения. Предпочтительные признаки этого способа описаны в пунктах 14-19.
Предложенный способ пассивной стабилизации судов, таких как корабли, суда для работ на мелководье, буровые вышки, баржи, платформы и подъемные краны, работающие в условиях открытого моря, с использованием предложенной системы описан в пункте 20 формулы изобретения. Предпочтительные признаки этого способа описаны в пунктах 21-24.
Все плавучие объекты, на которые будут сделаны ссылки и которые должны управляться в соответствии с изобретением, в дальнейшем упоминаются как суда.
Предложенная система содержит, в основном, цистерны, средства подачи текучей среды в цистерны и ее удаления из цистерн и систему управления, предназначенную для управления указанными средствами подачи и удаления, на основе информации о перемещениях судна и воздействиях окружающей среды на судно. Для полезного применения предложенных системы и способов судно предпочтительно оборудовано/спроектировано с приспособленными цистернами на определенных местах, имеющими отверстия в днище, которые достаточно велики для прохождения внутрь значительного объема текучей среды без кавитации или другого сопротивления в отверстиях цистерн.
Кроме этого, предпочтительно, цистерны имеют значительную высоту по отношению к уровню моря, так что значительный объем текучей среды может компенсировать плавучесть, которая создается изменениями в килевой качке, бортовой качке и осадке судна. На верхней части цистерн расположены средства подачи текучей среды в цистерны и ее удаления из цистерн, например вакуумный насос или подобное устройство, которое используют для регулировки давления/вакуума над поверхностью текучей среды в цистернах, и таким путем может увеличить уровень текучей среды в цистернах для создания необходимого балласта или понизить уровень текучей среды для обеспечения плавучести судна в любое время. Объем текучей среды в цистернах регулируется системой управления, так что уровень текучей среды изменяется для компенсации сил, воздействующих на судно, таких как движение моря на судно или других компонентов/нагрузок, воздействующих на судно, которые вызывают вертикальные перемещения.
В традиционном судне бортовую качку, килевую качку и изменения осадки обычно компенсируют с использованием перемещения блуждающей текучей среды в цистернах, причем количество этой текучей среды является частью грузоподъемности судна. Как описано выше, это «закрытые» системы, которые могут приводить к проблемам в стабильности, особенно в случае отказа, так как эти системы не обеспечивают достаточного (соотношения) балласт/плавучесть в пределах приемлемого времени благодаря ограничениям в общем объеме доступной текучей среды и производительности насосов. К тому же, они уменьшают общую грузоподъемность судна, так как масса текучей среды составляет часть массы судна.
При использовании изобретения цистерны, в основном, не содержат какое-либо количество текучей среды, но в них будет подаваться текучая среда при работе системы, и то - только если потребуется. Таким образом, судно будет иметь максимальную грузоподъемность. Так как для обеспечения балласта для судна система использует среду, в которой плавает судно, то это приводит к отсутствию ограничений в отношении объема текучей среды, так как цистерны присущи судну и расположены в соответствующих местах судна. Так как цистерны открыты в сторону среды, в которой плавает судно, то судно будет иметь возможность использовать эту среду как источник текучей среды.
Как было отмечено выше, предложенная система содержит систему управления, предназначенную для регулировки балласта/плавучести в цистернах. Система управления будет принимать информацию от различных источников о состоянии цистерн в любое время и информацию о перемещениях судна. Информация о перемещениях судна, например, в одном варианте выполнения может быть предоставлена блоком ОП (отсчета перемещений) и блоком ОВС (отсчета вертикальных смещений), которые предоставляют информацию о вертикальных или подобных перемещениях судна, то есть, например, о бортовой качке, килевой качке и осадке относительно исходного положения. При этом также будет полезна, например, гиростабилизация. В производственной деятельности, осуществляемой в открытом море, большинство судов снабжены системами ДП. ДП - Динамическое Позиционирование - является основным способом удержания корабля и полупогруженных буровых вышек в одинаковом горизонтальном положении над морским дном, сохраняя одинаковое направление или одно и то же положение по отношению к другому судну или плавающей конструкции без использования якоря, используя собственный гребной винт и поворотный движитель. Система ДП содержит средства прогнозирования изменений до того, как они в действительности происходят, для компенсации изменений в окружающей среде вокруг судна, обеспечивая посредством этого, устойчивую работу. Если судно оборудовано системой ДП, то система управления, соответствующая изобретению, может использовать информацию от нее о перемещении судна.
Предложенный способ активной стабилизации может быть кратко изложен в следующих этапах:
1. Получение информации о перемещениях судна от блока ОП, и/или от блока ОВС, и/или от системы ДП или аналогичных устройств, которые доставляют информацию о перемещениях судна,
2. Получение информации о состоянии цистерн системы,
3. Основываясь на информации, полученной на этапах 1 и 2, расчет, с помощью системы управления, соответствующей изобретению, степени заполнения для различных цистерн, то есть должен ли быть приложен к ним вакуум и/или давление, причем давление прикладывают только в том случае, если уровень в цистерне должен быть ниже, чем уровень текучей среды, в которой плавает судно.
4. Подача в средства регулирования вакуума и/или давления в цистернах параметров настройки, основанных на расчете на этапе 3.
5. Подача давления и/или вакуума к цистернам с применением средств контроля объема текучей среды в цистернах до тех пор, когда средства контроля состояния цистерн ответят системе управления, соответствующей изобретению, что требуемое давление и/или вакуум достигнуты.
6. Повторение этапов 1-5.
На этапах 1 и/или 2 могут в дополнение к получению информации о перемещениях судна также получать информацию о высоте и периоде повторения волн, которую получают подходящими средствами, такими как устройство определения характеристик волн, и/или датчики давления, и/или радиолокатор и/или лазер или аналогичные устройства, которые предпочтительно расположены вдоль бортов судна и предназначены для получения информации о высоте и периоде повторения волн.
Определение характеристик волн, то есть измерение их высоты, основано на использовании трубок, которые предпочтительно располагают в вертикальном направлении вдоль борта судна. Начальной точкой для уровня нижней части трубок является горизонтальная линия судна, соответствующая уровню среды, в которой плавает судно, при правильном размещении груза и балласта. При расположении датчика уровня в каждой трубке высота волны относительно начальной точки может быть определена в каждой трубке. Для индикации с помощью этого принципа направления движения волн должно быть использовано как минимум три датчика. При условии, что эти, по меньшей мере, три детекторные трубки размещены в каждом периоде повторения волны, становится возможным определить направление волны. Путем калибровки и синхронизации уровней в каждом отдельном датчике между правым и левым бортами и носом судна в любое время может быть получено действительное направление волн, воздействующих на судно.
Этот принцип также может быть использован для расчета изменения массы/распределения текучей среды, которое вызывает перемещение корпуса судна относительно вертикального перемещения судна, а именно ПЦП - продольного центра плавучести, ВЦП - вертикального центра плавучести и ПЦВ - продольного центра всплывания.
Система также может действовать как пассивная стабилизация судна, снабженного системой, соответствующей изобретению. Для выполнения пассивной стабилизации, средства подачи текучей среды в цистерны и ее удаления из цистерн, содержат управляемый клапан, размещенный в связи с каждой цистерной. Когда судно идет против течения и контролируемый поток воздуха был вычислен над верхней частью цистерн, тогда цистерна (цистерны) будет наполняться в зависимости от воздействия моря. Когда затем цистерна (цистерны) на судне наполнится максимально, оно будет иметь свою максимальную осадку в этой точке. Когда судно начнет подниматься благодаря размерам своего корпуса и плавучести, поток воздуха в цистерну (цистерны) будет перекрыт, так что судно будет нагружено таким образом, что будет предотвращен его подъем. Однако эта загрузка должна рассеяться с течением времени, когда судно достигнет своего наивысшего положения. Этого достигают открытием потока воздуха в цистерну (цистерны), и текучая среда немедленно выходит из нее (них).
Если рассмотреть цистерну в носу судна, то степень заполнения внутри носа должна следовать уровню моря, полученному под воздействием волн, и поэтому плавучесть носа уменьшена, так как цистерна заполнена текучей средой. Когда внешние волны проходят заднюю часть носа, волна будет воздействовать на корпус с увеличением плавучести, но как только волна проходит нос, масса текучей среды уменьшит волновую плавучесть на корпусе позади носа. Когда судно начинает терять плавучесть из-за волны, проходящей нос судна, тогда желательно, чтобы масса текучей среды в цистерне в носу была уменьшена, вследствие чего вакуум в цистерне в носу устраняют, и цистерна затем теряет текучую среду, которая использовалась как противовес волне, проходящей нос. Когда следующая волна ударяет в нос судна, цистерна в носу опять готова к заполнению текучей средой, так что степень заполнения начинает приспосабливаться к действительной высоте волны. Один способ пассивной стабилизации, соответствующий изобретению, может быть коротко изложен в следующих этапах:
1. Получение информации о перемещениях судна от блока ОП, и/или от блока ОВС, и/или от системы ДП или аналогичных устройств, которые доставляют информацию о перемещениях судна,
2. Получение информации о состоянии цистерн системы,
3. Основываясь на информации, полученной в этапах 1 и 2, расчет того, должны ли цистерны уменьшить или увеличить плавучесть,
4. Открытие клапана по требованию уменьшения плавучести и/или закрытие клапана по требованию увеличения плавучести в цистернах.
На этапах 1 и/или 2 в дополнение к получению информации о движениях судна, также предпочтительно могут получать информацию о высоте и периоде повторения волн, которая приобретается с помощью подходящих средств, таких как датчики давления, радиолокатор и/или лазер или аналогичные устройства, как устройство определения характеристик волн, которые предпочтительно расположены вдоль бортов судна для получения информации о высоте и периоде повторения волн.
С использованием предложенных системы и способов судно может быть обеспечено балластом и/или плавучестью в соответствии с тем, что требуется в связи с происходящими изменениями в окружающей обстановке, путем пассивной или активной стабилизации судна или сочетанием активной и пассивной стабилизации судна, и таким путем компенсацией этих изменений, в особенности вертикальных перемещений.
Предложенные система и способы будут способны работать в различных условиях, например:
1. Уменьшение килевой качки во время плавания, что обеспечивает снижение расхода топлива, безопасность судна и людей, увеличение удобства для пассажиров и моряков.
2. Уменьшение килевой и бортовой качки, которое обеспечивает те же самые преимущества, что и в предыдущем пункте, и безопасность работы на борту или совместно с другими установками или судами.
3. Уменьшение килевой качки, бортовой качки и регулирование осадки, что обеспечивает те же самые преимущества, что и в предыдущих пунктах, и работу с установками на дне моря.
4. Регулирование осадки, которое может быть использовано во время трудного сближения или с подводными судами, выполняющими работу в качестве транспортных судов, судов погрузки/разгрузки, которые работают у пристани, где низкое и высокое расположение уровней может усложнить погрузку/разгрузку.
Предложенная система не будет иметь каких-либо упомянутых выше проблем, на которые наталкиваются известные системы, так как цистерны могут работать независимо одна от другой, что имеет результатом стабильную систему с малой вероятностью ошибок и опасных ситуаций, таких как нестабильность или потеря способности обеспечить балласт из-за ограниченной массы текучей среды. Также стабильность может быть обеспечена более быстро по сравнению с существующими системами, так как обычные насосы не способны обеспечить такую же производительность, как система, соответствующая изобретению.
Система дополнительно приведет к тому, что суда будут способны противостоять неблагоприятной погоде и условиям волнения, так как судно может компенсировать воздействия изменений окружающей обстановки, такие как силы волн, в большей степени, чем раньше. Общий объем, предназначенный для активной стабилизации, может быть использован для увеличения плавучести судна во время экстремальных условий по волнению и/или нагрузке. Даже если судно в нормально нагруженном состоянии стоит в воде низко, это может быть изменено использованием объема плавучести, что доступно, если не использовать текучую среду в цистернах. Это приведет к уменьшению затрат на энергию, так как судно будет более способно противостоять воздействию волн и, следовательно, будет способно лучше удерживать свое положение, чем это возможно только с использованием гребных винтов и поворотных движителей. Таким путем судно будет иметь возможность уменьшить затраты энергии меньшим использованием поворотных движителей и гребных винтов.
Там, где судно оборудовано системой ДП, она принимает сигналы от спутников, относящиеся к его действительному положению, через антенну, расположенную высоко на судне над точкой, относительно которой, как вокруг центра, происходит и бортовая и килевая качка, и ее положение изменяется на несколько метров, в зависимости от реального положения судна. Если судно наклоняется в сторону правого борта, то положение судна покажет несколько метров к правому борту, соответствующих разнице в длине между средней точкой центра вращения судна и вертикалью через приемную антенну. Гребные винты и поворотные движители при этом попытаются предотвратить это изменение в положении и переместить судно на соответствующее расстояние в метрах к левому борту. Если такое движение существует на регулярной основе, то система ДП может компенсировать его с помощью своей «обучающей функции». Система ДП обычно использует приблизительно 20 минут для каждого определения места положения для установления области изменений в ветре, волнах, течении и тому подобном. Если судно оборудовано системой, соответствующей изобретению, то эти пределы ошибки могут быть значительно уменьшены. Другое связанное с изобретением преимущество, которое не получило большого внимания в последующем описании, состоит в том, что предложенная система имеет возможность изменения области обучения системы ДП. В одной ситуации используют активную стабилизацию, и обучающая система ДП думает, что волны, течение и ветер соответствуют ей, и в следующей ситуации система отключается, и волны воздействуют иначе на судно. Поэтому система ДП будет способна более быстро получить последние новости об изменениях путем получения информации от различных датчиков в системе, представленной в изобретении, так что быстрые изменения в погоде и/или условиях работы могут быть быстро и точно обновлены.
В дополнение к приведенному выше описанию представленное изобретение может служить для изменения осадки судна вместо использования судов, предназначенных работать на мелкой воде, постоянно имеющих очень маленькую осадку.
Выбросы окислов азота также могут быть радикально уменьшены с активной и пассивной стабилизацией, соответствующей изобретению. Там, где судно подвержено перемещениям, оно особенным образом находится под воздействием дизельных двигателей, где изменение мощности дизеля постоянно изменяет регулирование нагрузки, которая воздействует на судно. Чем больше изменения в сопротивлении этой активности, тем хуже сгорание, достигаемое в дизельном двигателе. Это также может быть сравнено со снижением максимальной скорости, например, от 15 до 14 узлов, приводящим к тому, что конечная дистанция может быть пройдена почти за одно и то же время, но при существенной экономической выгоде.
Представленное изобретение также обеспечивает увеличенную стабильность по сравнению со стабильностью существующих судов. Из известных несчастных случаев в судоходстве известно, что перемещение балласта не было выполнено, например, вследствие отказа источника энергии. Если бы суда были оборудованы системой, соответствующей изобретению, то ничего бы не воздействовало на судно в ситуации отказа источника энергии, так как жидкость из стабилизационных цистерн только вытекла бы наружу. Если система дополнительно снабжена системой аварийного резервного оборудования, то оно может приводить в действие клапаны для достижения стабилизации, даже когда случается отказ источника энергии.
Круизные суда также получат большую пользу от изобретения, так как они могут использовать систему для того, чтобы уменьшить килевую качку во время плавания, что приведет к снижению расхода топлива и большему удобству для пассажиров в том, что касается морской болезни. Это также уменьшит задержки плавания и предотвратит вынужденное укорочение части маршрута.
Использование предложенной системы на ледоколах, которые имеют нос специальной формы для того, чтобы ломать лед, приводит к возможности мореплавания в более трудных условиях, чем для обычных кораблей, это обеспечит, что ледокольные суда будут обеспечены условиями большей стабильности во время плавания. Вместо того чтобы иметь большое количество балластной воды для накачивания балласта из кормы в нос судна, судно может иметь нормально спроектированную корму и набирать морскую воду в корму и в нос с помощью вакуума вместо насосов. Вместо перемещения текучей среды из кормы в нос судна, судно по-прежнему будет иметь полный вес балласта, но забирая его внутрь непосредственно из моря и выпуская наружу этот вес также в море, вес будет изменяться быстро. Судно может быть относительно легким при подъеме на лед и быстро увеличить вес, если имеются проблемы с разрушением льда.
С помощью изобретения все суда, где задачи решаются вручную, будут иметь возможность достичь лучшей стабильности, что приведет к меньшим вертикальным перемещениям, что, в свою очередь, приводит к лучшим условиям труда и, поэтому, уменьшению числа несчастных случаев.
Использование изобретения уменьшит потребность в компенсации подъема кранов и буровых вышек, так как суда будут иметь меньшее вертикальное перемещение, чем те, что имеют место в известном оборудовании, делая работу в море более быстрой и точной.
Описанные выше примеры показывают, что область использования предложенной системы велика и ее возможности многочисленны. В современном обществе, где велико внимание к окружающей среде, будет понятно, что все суда, использующие представленное изобретение, будут сберегать топливо и, следовательно, будут иметь меньше выбросов.
Очевидно, что все суда должны удовлетворять теоретическим требованиям стабильности, которые предъявляются сегодня, и что представленное изобретение направляет внимание на это.
Также очевидно, что система может быть ручной и/или автоматической и что будут возможности устанавливать горизонтальную линию уровня спокойного моря при правильном расположении груза и балласта в соответствии с требованиями. В некоторых случаях для судна будет достаточно иметь только заполненные цистерны стабилизации для увеличения общего веса судна. Если судно не совершает плаваний, этого может быть достаточно для некоторых целей. Осадка и вес судна могут быть отрегулированы до наиболее выгодных рабочих условий для каждой ситуации и могут быть быстро изменены. В современных условиях плавания часто случается, что суда берут избыточный балласт при плавании в плохую погоду, но даже если погода улучшается, плавание продолжается с тем же балластом, что и при плохой погоде.
Дополнительные подробности очевидны из следующего ниже описания.
Пример
Ниже изобретение описано подробно со ссылками на чертежи, на которых:
Фиг.1а и b изображают схематично судно в одном состоянии соответственно в разрезе сбоку и сверху,
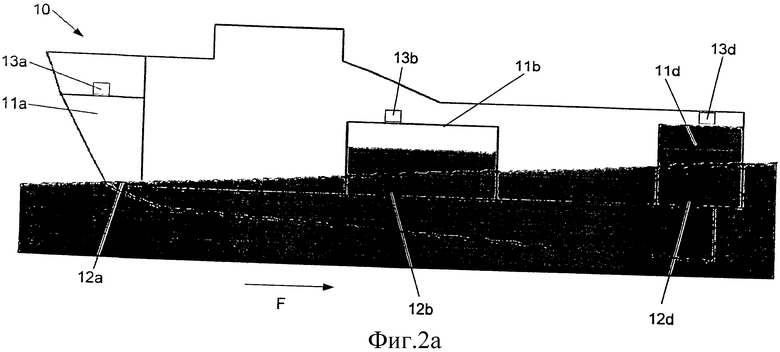
Фиг.2а и b изображают судно, показанное на фиг.1а и b, в другом состоянии,
Фиг.3 изображает поперечный разрез судна, показанного на фиг.1а-b и 2а-b, через его среднюю часть в третьем состоянии,
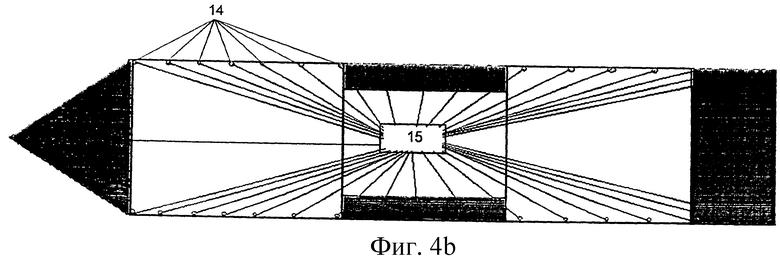
Фиг.4а-b изображают судно с датчиком, расположенным на его борту,
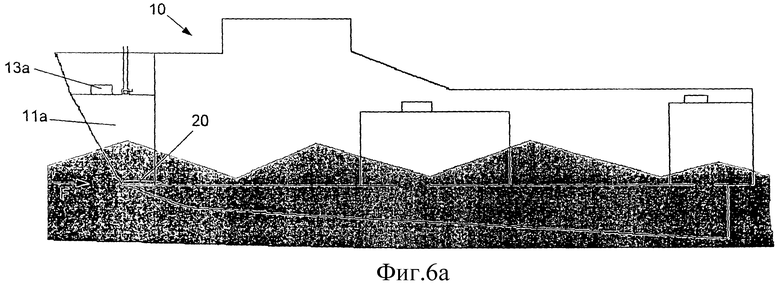
Фиг.6а и b иллюстрируют пример того, как система может использовать отдельную волну, и
Фиг.6а и b иллюстрируют пример использования пропеллера, установленного в отверстии цистерны.
Фиг.1а и b изображают пример судна 10, на котором установлена предложенная система. Система содержит, например, четыре цистерны 11a-d, которые расположены в подходящих местах судна 10, при этом, например, одна цистерна 11а расположена в передней части судна 10, две цистерны 11b и 11 с расположены на каждом из бортов, вблизи середины судна 10, и одна цистерна 11d расположена в задней части судна 10. Таким образом, судно с использованием цистерн 11a-d будет способно противодействовать влияниям окружающей обстановки, таким как волны, ударяющие о судно вдоль борта и на траверзе или их комбинации.
Каждая из цистерн 11a-d приспособлена к определенному судну 10 в том, что касается размера (объема) и высоты над уровнем жидкости, в которой плавает судно, такого как уровень моря, причем цистерны имеют отверстия 12a-d в днищах. Отверстия 12a-d достаточно велики для прохождения через них достаточного объема текучей среды без кавитации или другого сопротивления.
По высоте текучей среды в цистернах 11a-d будет ограничение примерно в 8 метров, связанное с физическими законами вакуума в текучих средах и для предотвращения испарения текучей среды под воздействием вакуума вместо обеспечения ее подъема. Чем выше вакуум, который будет необходим в цистернах, тем менее благоприятно это будет в том, что касается отношения экономичность/энергия. Чем большую поверхность имеют цистерны 11а-b, тем меньше энергии нужно для достижения полного наполнения. Что касается судна, то цистерна в передней части судна в любом случае будет выше цистерны в середине судна, потому что при плавании изменение воздействия волн в передней части судна больше, чем в середине судна.
Расположение цистерн 11a-d будет зависеть от того, каким является судно 10 и какие качества требуются от судна 10. Цистерны 11a-d, которые должны будут работать для устранения килевой качки и бортовой качки, будут тем более эффективны, чем дальше наружу от наружных точек корпуса они будут расположены, тогда как цистерны 11a-d, которые должны работать для регулировки осадки судна, наиболее выгодно располагать в середине судна 10.
Чем ниже на судне расположены отверстия 12a-d, тем более стабильным будет управление вакуумом/давлением в цистернах 11a-d.
Далее, цистерны 11a-d снабжены средствами 13a-d регулирования объема текучей среды в цистернах, причем эти средства предпочтительно являются вакуумными компрессорами или подобными устройствами и используются для регулирования давления/вакуума на поверхности текучей среды и таким путем для понижения или поднятия уровня текучей среды для обеспечения плавучести или соответственно балласта в цистернах 11a-d при нахождении судна в различных положениях. Средства 13a-d предпочтительно расположены снаружи цистерн 11a-d для обеспечения их легкого обслуживания. Цистерны 11a-d также могут быть опорожнены от текучей среды путем подведения атмосферного давления к верхней части цистерн 11a-d, если ситуация позволяет это, и таким путем нет необходимости подводить мощность для опорожнения цистерн 11a-d.
Для управления системой и получения информации о состоянии цистерн 11a-d цистерны 11a-d дополнительно снабжены измерительными устройствами (не изображены), такими как датчики/измерители давления, поплавки, измерители скачков давления или аналогичными устройствами, для выдачи информации о состоянии цистерн 11a-d системе управления.
Как было упомянуто, система дополнительно содержит систему управления, которая снабжена программным обеспечением/алгоритмом и/или запрограммирована для управления средствами 13a-d регулирования уровня текучей среды в цистернах 11a-d в зависимости от предстоящих перемещений судна 10, в особенности, вертикального перемещения, которое может быть подразделено на бортовую качку, килевую качку и осадку.
Система управления будет принимать информацию от средств, информирующих о состоянии в цистернах в любое время, и информацию о перемещениях судна. Информация о перемещениях судна в одном варианте выполнения может быть получена от блока ОП и блока ОВС, предпочтительно с гиростабилизацией, или от аналогичных устройств, дающих информацию о вертикальных перемещениях судна. Если судно оборудовано системой ДП, то система управления может быть обеспечена прямым входом от нее.
Кроме того, судно предпочтительно снабжено детекторными средствами 14 (см. фиг.4а и 4b), такими как датчики давления, радиолокатор, и/или лазер, и/или устройство определения характеристик волн или аналогичными устройствами, причем средства 14 предпочтительно расположены вдоль бортов судна для обеспечения информации о высоте и периоде повторения волн. В изображенном примере средства 14 выполнены в форме устройств определения характеристик волн. Устройство определения характеристик волн использует водомерные трубки, которые предпочтительно расположены вертикально по борту судна. Начальная точка в нижней части водомерных трубок - это горизонтальная линия уровня моря на судне при правильном распределении нагрузки и балласта на судне. При размещении датчика уровня в каждой трубке высота волны в данном месте может быть определена в каждой трубке. Для указания с помощью этого принципа направления движения волны должны быть использованы как минимум три датчика. При условии, что имеются как минимум три детекторных трубки для любого периода волны, будет возможно определить направление волны. При калибровке и синхронизации уровня каждого датчика между правым бортом, левым бортом и передней частью судна в любое время может быть определено фактически существующее направление волны, воздействующей на судно в любое время. Этот принцип также может быть использован для расчета массы/расположения текучей среды, которая действует на движение корпуса, такие как движения ПЦП - продольного центра плавучести, ВЦП - вертикального центра плавучести и ПЦВ - продольного центра всплывания, в связи с вертикальными перемещениями судна.
Таким образом, система управления может быть обеспечена информацией для создания описания периода повторения волны, направления волны и общего изменения плавучести, создаваемого волной. Информация создает возможности прогнозировать влияние волны, прежде чем судно начнет реагировать.
Информацию от средств 14 предпочтительно отслеживают отдельным блоком 15, который распределяет информацию для управляющих средств.
Система управления обрабатывает полученную информацию и затем рассчитывает параметры настройки для средств 13a-d, которые затем задают правильное давление и/или вакуум в действующих цистернах 11a-d.
Судно 10, оборудованное системой, соответствующей изобретению, будет более приспособлено противодействовать влиянию среды вокруг судна, такому как волны и другие внешние факторы, воздействующие на судно. Судно также будет более приспособлено к удержанию его положения, чем только при использовании гребных винтов и поворотных движителей, которые обычны для существующих судов. Это также приводит к снижению расхода энергии, так как система, подобная этой, требует меньших ресурсов, чем при использовании поворотных движителей и гребных винтов, так как суда в меньшей степени будут подвержены воздействию условий вокруг судна, таких как волны. Это, например, для судов в открытом море, обеспечено системой ДП, которая удерживает судно в его положении, в то время как система, соответствующая изобретению, противодействует воздействиям со стороны среды, окружающей судно, таким как воздействия волн, которые, главным образом, определяют вертикальные перемещения.
Фиг.1а-b изображают пример того, как волны ударяют о судно 10, находящееся в положении носом напротив силы F. Например, судно находится в (этом) положении относительно другого судна или другой находящейся в открытом море установки (не изображена). Например, из расчетов системы ДП перемещений судна или из информации блока ОП и блока ОВС и информации от измерительных средств в цистернах и детекторных средств вдоль бортов судна система управления, соответствующая изобретению, вычисляет степень наполнения в различных цистернах 11a-d, которая необходима для судна, чтобы воздействие этой волны было таким малым, какое только возможно. В этом примере это приведет к тому, что система управления на основе данных параметров посылает управляющие сигналы к средствам 13a-d о степени заполнения для различных цистерн 11a-d. Для противостояния плавучести, созданной волной, цистерны 11а-с, например, окажутся заполненными на 100%, тогда как цистерна 11d в кормовой части судна 10 не подвергнется воздействию волны в такой же степени и будет заполнена только на 10%. Таким образом, система может обеспечить необходимый балласт в передней части судна 10 для удержания его в вертикальном положении, то есть, например, удерживая то же самое направление, то же самое расстояние от дна моря или то же самое расстояние по отношению к морской установке. В качестве иллюстрации можно рассмотреть пример, что судно 10 должно иметь цистерну 11а в передней части судна, содержащую 200 м3 балласта для компенсации изменений плавучести в передней части судна при волнах в 3 метра, как изображено на фиг.1а-b.
Если период повторения волны в данном примере составляет 10 секунд, это приведет к тому, что цистерна 11а, например, должна быть наполнена на 200 м3 за 10 секунд, что приведет к тому, что уровень текучей среды в цистерне 11а, например, должен быть поднят на 4 метра по отношению к уровню текучей среды 100, в которой плавает судно, то есть к уровню моря. В соответствии с изобретением это может быть быстро выполнено с использованием вакуумного компрессора 13а, расположенного в соединении с цистерной 11а, как описано выше. Вакуумный компрессор 13а обеспечивает отрицательное давление в верхней части цистерны 11, приводящее к всасыванию текучей среды внутрь через отверстия 12а в цистерну 11а для уравновешивания давления.
Вакуумный компрессор, который приводится в действие мотором с мощностью, например, 200 кВт, будет способен выполнить это. При сравнении традиционных морских водяных насосов, таких как насос антикреновой системы, потребуется производительность примерно в 72000 м3/час для подачи такого же объема. Для приведения в действие такого насоса потребуется двигатель мощностью 3850 кВт. Это показывает, что здесь может быть получена большая экономия расходуемой энергии и что этого невозможно достичь в системе, подобной той, что представлена в изобретении, при использовании известной технологии. Кроме этого, также существуют проблемы с насосами, которые должны работать в морской воде; это могут быть проблемы с коррозией насосов, так как морская вода является коррелирующей средой, и вода должна постоянно накачиваться внутрь или наружу из цистерны, которая в этом случае должна быть закрыта в днище. Это также означает, что эта масса текучей среды уменьшает возможности судна перевозить грузы.
Открытая балластная цистерна будет, по определению, также уменьшать общую грузоподъемность, если в днище цистерны нет клапана, который может быть закрыт. С другой стороны, много обсуждений показывает, что было бы удобно обеспечить цистерны средствами для закрывания отверстий в днище. Даже если балластная цистерна, которая открыта в днище, имеет двойную защиту в верхней части цистерны для предотвращения выхода воздуха из цистерны, теоретически будет поддерживаться плавучесть так, как если бы цистерна имела клапан в днище. При введении в днище цистерны средства закрывания, такого как клапан или аналогичное устройство, будет возможно, когда не используют активную стабилизацию, закрывать клапан и использовать судно, как обычно. Даже хотя из опыта известно, что такой клапан будет подтекать, на трубе компрессора, которая соединена с цистерной, может быть использован запорный клапан. Таким образом воздух будет удерживаться в верхней части цистерны, так что вода сможет только сжать воздух в цистерне, и плавучесть будет такая же, как если бы цистерна была закрыта в днище. (При введении воздушных трубок во все донные цистерны на существующих судах, это могло бы способствовать предотвращению посадки на мель судов, которые плавают по мелководью, и повреждению балластных цистерн.)
Так как в примере волна проходит вдоль судна, то изменяется потребность изменять соотношение плавучести/балласта в разных цистернах 11a-d для противодействия влиянию волны. Фиг.2а и 2b изображают ситуацию, в которой вершина волны проходит мимо кормовой части судна. Из расчета системой ДП будущих движений судна и/или информации от блока ОП и блока ОВС и информации от измерительных средств в цистернах и детекторных средств, расположенных вдоль бортов судна, система управления, соответствующая изобретению, рассчитывает степень заполнения различных цистерн 11a-d, которая необходима для судна для того, чтобы воздействие волны на него было настолько малым, насколько это возможно в описанной ситуации. Результатом этого является то, что система управления, основываясь на данных параметрах, посылает управляющие сигналы средствам 13a-d о степени заполнения цистерн 11a-d. Так как здесь судно 10 находится под воздействием, главным образом, волны в кормовой части судна, цистерна 11d в кормовой части судна заполнена на 100%, в то время как цистерны 11b-с вблизи середины судна заполнены на 75%, а цистерна 11а в передней части судна заполнена на 10%. Таким путем система, соответствующая изобретению, может противодействовать силам со стороны волн, воздействующих на судно, и удерживать судно 10 в стабильном положении по вертикали, то есть поддерживать одно и то же направление, одно и то же расстояние от дна моря и поддерживать одно и то же расстояние относительно морских установок. Если цистерна 11d имеет такие же параметры, что использованы для цистерны 11а, то такие же самые расчеты, что и для цистерны 11а, обеспечат такой же самый результат для цистерны 11d. Аналогичные расчеты также могут быть выполнены для двух цистерн вблизи середины судна.
Так как в цистернах 11а-с должен уменьшиться объем текучей среды по сравнению с ситуацией, показанной на фиг.1а-b, то должно быть приложено давление над поверхностью текучей среды в цистернах 11а-с. Если отверстия 12а-с в цистернах 11а-с достаточно велики для опорожнения цистерн в течение 10 секунд, каковым был период повторения волны в приведенном выше примере, то может быть использовано атмосферное давление. В этом случае не потребуется энергии для опорожнения цистерн. В таком случае в данном примере расход энергии составит только половину расхода энергии вакуумным компрессором за этот период для цистерн 11а и 11d, в то время как этот расход будет значительно меньше для цистерн 11b и 11с в данный период, когда судно находится в своем положении относительно морской установки при одинаковых окружающих условиях. Если имеется потребность в изменениях, которые являются следствием потребности в плавучести в одной из цистерн, то вакуумный компрессор может добавить дополнительное давление в цистерны и таким образом внести вклад в увеличенную плавучесть в цистернах. Как отмечено выше, цистерны могут быть снабжены средствами закрывания отверстий цистерн, если потребуется.
Что касается фиг.3, то она изображает поперечный разрез средней части и середины цистерн 11b и 11с судна, снабженного системой, соответствующей изобретению. В этом случае проиллюстрирован пример, который показывает волну, толкающую судно 10 на траверзе с силой F. Здесь система, соответствующая изобретению, наполнит цистерну 11b, которая расположена ближе всего к борту, в который ударила волна, полностью обеспечивая судно 10 балластом по левому борту и таким образом противодействуя силам со стороны волн и предотвращая наклон. Таким образом судно удерживают примерно в горизонтальном положении. Когда волна переходит к правому борту и обеспечивает общую плавучесть корпуса, общая степень заполнения цистерн 11b и 11с должна быть изменена, и цистерна 11с, следовательно, должна быть заполнена, а цистерна 11b опорожнена для противодействия силам со стороны волны.
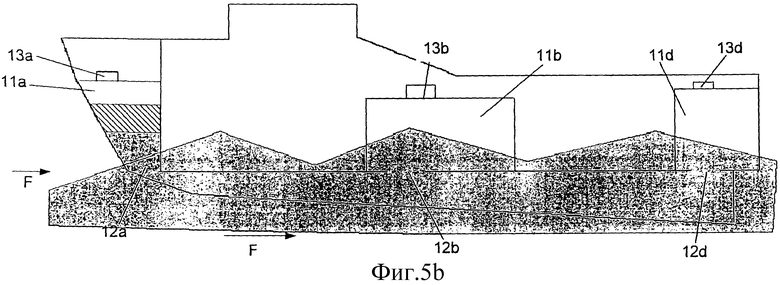
Фиг.6а и b иллюстрируют, что предложенная система является энергосберегающей. Эта система может использовать отдельные удары волны, например цистерна 11а, как изображено на фиг.5а-b. Вакуумный компрессор 13а или выпускной клапан 13а может сделать цистерну 11а свободной от давления при находе волны, и текучая среда свободно войдет в цистерну 11а. Цистерна 11а, следовательно, не приведет к плавучести из-за того, что волна первой ударяет о поверхность судна, в то время как высота волны задаст степень заполнения цистерны 11а текучей средой. Так как волна продолжается дальше назад, по направлению вдоль корпуса, то она подействует на плавучесть судна. Вакуумный компрессор 13а затем примет сигнал для увеличения вакуума в цистерне 11а, который посредством этого обеспечит цистерну 11а требуемой массой текучей среды для уменьшения плавучести, созданной проходящей волной. Это проиллюстрировано на фиг.6b, которая изображает цистерну 11а, постепенно заполняемую балластом благодаря волне (серая окраска), а дополнительный балласт, доставленный вакуумным компрессором 13а, изображен заштрихованной площадью в цистерне 11а.
Способ активной стабилизации судна с использованием системы, соответствующей изобретению, более подробно описан ниже.
Способ активной стабилизации судна содержит следующие этапы:
1. Получение информации о перемещениях судна от блока ОП, и/или ОВС, и/или от ДП системы или подобных устройств,
2. Получение информации о состоянии цистерн системы,
3. Расчет степени заполнения различных цистерн, основываясь на информации, полученной на этапах 1 и 2, с применением системы управления, соответствующей изобретению, то есть следует ли приложить вакуум или давление, причем следует приложить только давление, если уровень в цистерне должен быть ниже, чем уровень текучей среды, в которой плавает судно,
4. Подачу средствам регулировки вакуума и давления в цистернах параметров настройки, основанных на расчете, проведенном на этапе 3,
5. Приложение давления или вакуума к цистернам с применением средств регулирования объема текучей среды в цистернах до тех пор, когда средства, информирующие о состоянии цистерн, сообщат системе управления, соответствующей изобретению, что требуемое давление или вакуум достигнуты,
6. Повторение этапов 1-5.
Этап 1 включает получение информации от блока ОП и блока ОВС и системы ДП или аналогичных устройств, которая содержит сведения о перемещениях судна и/или сведения о высоте и периоде повторения волны, с применением подходящих устройств, таких как устройства определения характеристик волн. С использованием этой информации судном можно управлять для противодействия этим ожидаемым изменениям. Как отмечалось, система ДП, главным образом, включена для управления гребными винтами и поворотными движителями судна, но с использованием системы, соответствующей изобретению, информация о перемещениях судна может быть использована для активной и пассивной стабилизации судна путем подачи балласта или плавучести судну с помощью соответствующих цистерн, расположенных в соответствующих местах. Это обеспечит совершенно новые возможности управления судном.
Так как в настоящее время существуют законы и правила относительно ветра и перемещений на море, которые устанавливают границы того, когда приемлемо выполнять работу на судне совместно с другими судами/установками, изобретение приведет к тому, что в плане вертикальных перемещениях судно будет менее подвержено воздействию волн и ветра и что судно будет способно вести работу при более неблагоприятных условиях и все еще находиться в пределах установленных границ, относящихся к волнам и ветру, что означает, что судно будет меньше простаивать в ожидании более спокойной погоды перед продолжением начатого дела.
Посадка вертолетов также может иметь возрастающие проблемы из-за указанных перемещений, и представленное изобретение может создать существенный вклад в решение этой проблемы.
Этап 2 включает получение информации о состоянии цистерн системы, что является предпосылкой для системы управления, соответствующей изобретению, для определения того, что должно быть приложено к цистерне, давление или вакуум.
Этапы 1 и/или 2 могут дополнительно к получению информации о перемещениях судна также включать получение информации о высоте и периоде повторения волны, и эта информация делает возможным для системы управления формировать представление о периоде повторения волны, направлении волны и общем изменении плавучести, производимом волной. Это предпочтительно выполняют с использованием детекторных средств, таких как датчики давления, радиолокатор, и/или лазер, и/или устройство определения характеристик волны или аналогичные устройства, предпочтительно располагаемые вдоль бортов судна.
Этап 3 включает расчет степени заполнения в цистернах, основанный на информации, полученной на этапах 1-2, и предопределенных параметрах. Степень заполнения регулируют подачей в цистерны вакуума и/или давления. Если в цистерну должен быть подан балласт, то система рассчитает, насколько большой вакуум требуется для достижения требуемого балласта, и посредством этого наполнит цистерну текучей средой. Если цистерна должна быть обеспечена плавучестью, система рассчитает, насколько большое давление нужно подать в цистерну для достижения требуемой плавучести.
Система управления, соответствующая изобретению, будет заранее снабжена предварительно определенными параметрами характеристик судна и характеристик системы. Различные суда будут иметь различные характеристики, различные цистерны, различную производительность вакуумных компрессоров и так далее, и поэтому система управления включает такие параметры, чтобы требуемый режим работы и характеристики судна были достигнуты. Система управления также содержит сведения о запасе прочности и другие инструкции по технике безопасности, которым нужно следовать при возникновении критической ситуации. Система управления также обеспечена возможностями изменять параметры вручную, так что судно может быть обеспечено требуемыми характеристиками в связи с требуемым режимом работы. Система также может быть обеспечена специальными средствами для критических ситуаций, такими как цистерны, снабженные дроссельной заслонкой в верхней части, которая быстро удаляет вакуум из цистерны, и поэтому текучая среда вытекает. Во многих обстоятельствах также уместно иметь дополнительный запасной компрессор для каждой цистерны, который будет принимать нагрузку от основного компрессора, если с ним что-нибудь произойдет.
Система также может быть расположена таким образом, чтобы, например, если колебания осадки являются критичными для судна во время работы, то система будет компенсировать дополнительно и их, если возникнет критическая ситуация. Это подобно плаванию по мелководью, как описано выше.
Этапы 4 и 5 включают подачу средствам регулирования вакуума и давления в цистернах параметров настройки для достижения требуемого балласта или плавучести в цистернах. Давление или вакуум создают в цистернах до тех пор, когда средства информации о состоянии в цистернах ответят системе управления, что требуемый вакуум или давление достигнуты.
Этап 6 включает повторение этапов 1-5. Если положение судна и окружающая среда непрерывно изменяются, то предложенная система должна также непрерывно изменяться, так чтобы судно показывало бы требуемый режим работы. Система, соответствующая изобретению, поэтому обеспечивает замкнутый контур управления, который сам себя корректирует.
Система также может действовать как пассивная стабилизация для судна, оборудованного системой, соответствующей изобретению. Когда судно движется по течению и рассчитана регулируемая вентиляция в верхних частях цистерн, цистерны будут наполнены в соответствии с уровнем моря. Когда потом судно подвергнется большему наполнению цистерн, то оно получит большую осадку в обстоятельствах, о которых идет речь. Когда судно начинает подниматься благодаря размерам корпуса и плавучести позади цистерны 11а, воздушный поток в цистерну закрывают, так что судно так поэтому тяжелеет, что его подъем будет предотвращен, но это утяжеление рассеется в то время, когда судно достигнет наибольшего подъема при открывании воздушного потока цистерн, так что текучая среда вытекает наружу немедленно. То есть произошло использование как статического перемещения судна, полученного благодаря волне, и изменения уровня волны снаружи корпуса. Это изменение между уменьшением плавучести и свободным притоком текучей среды в цистерну, и в следующий момент свободная текучая среда, которая втекла в цистерну, сохраняется как балласт. Таким путем пассивная стабилизация будет работать таким же образом, как амортизатор на автомобиле. Степень открытия воздушного потока, естественно, будет контролироваться и автоматизироваться системой управления, так что система найдет наилучшую степень открывания для предотвращения чрезмерного износа механических частей системы.
Когда система, соответствующая изобретению, должна использоваться как пассивная система, можно извлечь пользу из информации, которая уже присутствует в активной стабилизации, для управления клапаном в верхней части цистерн, вместо управления вакуумным компрессором. Закрытый клапан соответствует максимальной мощности компрессора, а открытый клапан соответствует минимальной мощности компрессора.
Способ пассивной стабилизации, соответствующий изобретению, может быть кратко изложен в следующих этапах:
1. Получение информации о перемещениях судна от блока ОП, и/или от блока ОВС, и/или от системы ДП или подобных устройств, которые обеспечивают информацию о перемещениях судна,
2. Получение информации о состоянии цистерн системы,
3. Расчет того, должны ли цистерны иметь балласт или увеличенную плавучесть, на основе информации, полученной на этапах 1 и 2,
4. Обеспечение средств управления количеством текучей среды в цистернах параметрами настройки на открытие, когда требуется уменьшить плавучесть в цистернах, и/или на закрытие, если требуется увеличить плавучесть в цистернах,
5. Непрерывное повторение этапов 1-4.
Здесь на этапах 1 и/или 2 могут также в дополнение к получению информации о перемещениях судна также предпочтительно получать информацию о высоте и периоде повторения волны, получаемую с помощью подходящих средств, таких как датчики давления, радиолокатор, и/или лазер, и/или устройство определения характеристик волны или аналогичных устройств, которые предпочтительно расположены вдоль бортов судна для обеспечения информации о высоте и периоде повторения волны.
Если информация отсутствует, то клапан должен регулироваться вручную для наилучшего возможного действия с использованием проб и опыта таким же образом, как это делается в цистерне для стабилизации, препятствующей крену, которую заполняют в соответствии с опытом и обстоятельствами. В регулируемом амортизаторе на автомобиле отверстие сопла изменяет размер, и таким же образом клапан может быть настроен для наилучшего возможного воздействия на килевую качку судна.
Варианты
Цистерна в соответствии с изобретением может иметь различную форму, размер, высоту и должна быть приспособлена к каждому судну. Кроме того, каждое судно будет иметь требуемые режимы работы и характеристики, к которым должна быть приспособлена система, соответствующая изобретению, для достижения требуемого режима работы и характеристик.
Средства регулирования плавучести и балласта в цистернах - это предпочтительно вакуумные компрессоры/насосы, но цистерны также могут заполняться с использованием, например, горизонтальных боковых пропеллеров, расположенных в нижней части цистерны, которая представляет собой отверстие в цистерне.
Даже несмотря на то, что подача в емкость может быть возможна, использовать горизонтальный боковой пропеллер представляется менее предпочтительным:
1) пропеллер должен работать под водой,
2) для обслуживания судно должно приходить в док,
3) возможности утечки и загрязнений окружающей среды,
4) повышенные расходы на обслуживание,
5) зависимость от бригады рабочих по обслуживанию,
6) повышение стоимости капиталовложений,
7) более дорогостоящая установка.
Обратимся теперь к фиг.6а-b, которые иллюстрируют этот пример. Горизонтальный пропеллер расположен в отверстиях 12a-d балластных цистерн 11a-d (изображен только для цистерны 11а), причем пропеллер 20 может быть аналогичен принципу бокового пропеллера с регулируемым углом лопастей пропеллера. Лопасти пропеллера могут быть регулируемыми для возможности наполнения или опорожнения цистерн 11a-d. Лопасти пропеллера могут быть выполнены так, что если они работают с нулевым углом расположения, то они закрывают отверстие цистерны. В описанной выше ситуации может также использоваться убирающийся курсовой пропеллер 21. Когда этот пропеллер 21 не используют для маневрирования, он может быть повернут так, что сопло пропеллера оказывается соединенным с отверстием цистерны в днище цистерн 11a-d. Затем он может быть использован для наполнения цистерн 11a-d текучей средой или их опорожнения. Фиг.6а изображает неподвижный пропеллер в отверстии цистерны 11а, тогда как фиг.6b изображает убирающийся курсовой пропеллер 21 в нижнем положении М для использования при маневрировании и в убранном положении О для наполнения или опорожнения цистерны 11а.
Цистерны в их отверстиях могут быть снабжены средствами закрывания цистерн, например, для обеспечения плавучести.
Пропеллер, установленный вертикально на днище цистерны, также может использоваться для закрывания цистерны, для чего он содержит лопасти специальной формы и ступицу, которые приводят к тому, что если его шаг находится в специальной зоне, то достигается совершенно закрытая конструкция, почти как клапан.
Для этой цели также будет возможно использовать гидравлический клапан, например разработку гидравлического клапана, имеющего вид пропеллера.
Устройство «Vross», которое представляет собой пригодный для работы под водой пропеллер, в резервном режиме (открытое положение) может быть предназначен для мгновенного закрывания отверстия в днище стабилизирующей цистерны, и, таким образом, он может обеспечить изменение количества текучей среды в стабилизирующей цистерне. Он может замещать вакуумные компрессоры или использоваться как дополнение к вакуумным компрессорам.
Существующие компрессоры в современной системе также могут использоваться для надежного соединения всех балластных цистерн с подачей воздуха. При возникновении возможных несчастных случаев, которые вызовут повреждение корпуса или бортов судна, компрессор может подать значительное количество воздуха в поврежденную цистерну для поддержания первоначальной плавучести в цистерне, так что будет предотвращен крен и возможное затопление судна. Поврежденная цистерна должна быть снабжена запорным клапаном для обычного потока воздуха.
Суда, снабженные цистернами для морской воды, грязи и вяжущих веществ, могут использовать их в качестве буферных цистерн для вакуума и давления воздуха для предотвращения быстрых изменений нагрузки компрессора.
Вакуумные компрессоры также могут использоваться для перемещения охлаждающей воды из морского водозаборника и через охлаждающую установку судна, при этом нет нужды использовать традиционные насосы для морской воды.
Вакуумный компрессор может использоваться вместо традиционных дренажных насосов и сепараторов масло/вода.
Цилиндрическая цистерна, которая может выдерживать нагрузки от вакуума и давления, может быть присоединена к вакуумному компрессору, который имеет трубу, соединяющую его с трюмными помпами судна. Здесь отрицательное давление может быть использовано вместо современных дренажных помп. При закрытых клапанах для трюмных помп вакуумный компрессор испарит воду из загрязненной трюмной воды и выведет чистый водяной пар наружу в атмосферу. После удаления воды из загрязненной трюмной воды вакуум в цистерне реверсируют на избыточное давление, и клапан открывается для опорожнения цистерны в цистерну с отстоем. Таким образом, с использованием изобретения сепаратор масло/вода, который исключительно трудно заставить работать удовлетворительно в соответствии с новыми правилами по перекачке трюмной воды за борт, которые допускают удаление воды с содержанием масла по максимуму 5 ppm.
Следует отметить, последние два упомянутых выше варианта могут быть реализованы только, если вакуумный компрессор имеет значительную свободную мощность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |
| Способ управляемого изменения крена автономного необитаемого подводного аппарата | 2024 |
|
RU2823820C1 |
| СПОСОБ УМЕРЕНИЯ БОРТОВОЙ КАЧКИ СУДНА ПОСРЕДСТВОМ ПАССИВНОГО УСПОКОИТЕЛЯ БОРТОВОЙ КАЧКИ И ПАССИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 2013 |
|
RU2529244C1 |
| МОРСКОЕ ПЛАВУЧЕЕ ОСНОВАНИЕ ДЛЯ ДОБЫЧИ, ХРАНЕНИЯ И ВЫГРУЗКИ, ИСПОЛЬЗУЕМОЕ В ПОКРЫТОЙ ЛЬДОМ И ЧИСТОЙ ВОДЕ (ВАРИАНТЫ) | 2008 |
|
RU2478516C1 |
| Сторожевой корабль | 2024 |
|
RU2834069C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| ЛЕДОКОЛЬНАЯ СИСТЕМА ДЛЯ ПЛАВАЮЩИХ ТЕЛ | 2009 |
|
RU2483967C2 |
| ПОЛУПОГРУЖНАЯ МОРСКАЯ ПЛАТФОРМА ПОВЫШЕННОЙ ВОЛНОСТОЙКОСТИ | 2001 |
|
RU2191132C1 |
| СПОСОБ СПАСЕНИЯ СУДНА | 1997 |
|
RU2127691C1 |
| ВОЛНОСТОЙКИЙ САМОХОДНЫЙ КАТАМАРАННЫЙ КОМПЛЕКС | 2008 |
|
RU2398705C2 |






Изобретение относится к системе активной и пассивной стабилизации судна, такого как корабли, суда для работ на мелководье, буровые вышки, баржи, платформы и подъемные краны, работающие на море. Судно (10) снабжено цистернами (11a-d) для обеспечения плавучести и/или балласта. Цистерны (11a-d) имеют отверстия (12a-d) в днище, обращенные в сторону среды, в которой плавает судно (10). Цистерны (11a-d) независимы одна от другой и имеют отверстия (12a-d), через которые может пройти значительный объем текучей среды без кавитации или другого сопротивления. Система содержит средства (13a-d) подачи текучей среды в цистерны (11a-d), управляемые с обеспечением противодействия воздействию внешних сил на перемещения судна (10). Изобретение также содержит способ активной и способ пассивной стабилизации судна с использованием этой системы. Повышается безопасность экипажа и судов, работающих в условиях открытого моря. 3 н. и 21 з.п. ф-лы, 11 ил.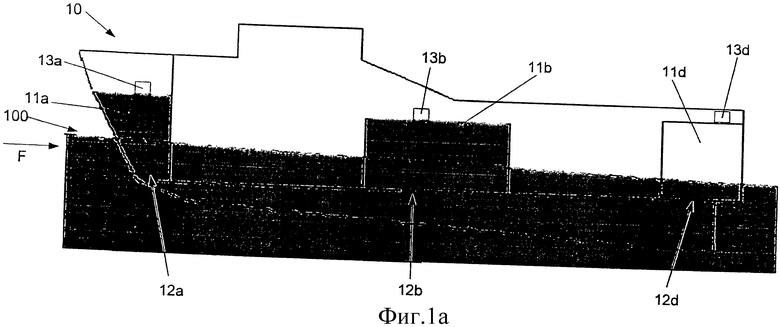
1. Система активной и пассивной стабилизации судна (10), такого как корабли, суда для работ на мелководье, буровые вышки, баржи, платформы и подъемные краны, работающие на море, снабженного одной или большим количеством цистерн (11a-d) для обеспечения плавучести и/или балласта, которые имеют отверстия (12a-d) в днище, обращенные в сторону среды, в которой плавает судно (10), и которые независимы друг от друга, отличающаяся тем, что указанные одна или несколько цистерн (11a-d) расположены так, что они имеют такую протяженность, что когда судно (10) плавает в нормальных условиях без какой-либо нагрузки, по меньшей мере существенные части цистерн (11a-d) проходят выше уровня текучей среды, в которой плавает судно (10), и по меньшей мере части цистерн (11a-d) проходят ниже уровня текучей среды, в которой плавает судно (10), при этом система содержит средства (13a-d) создания положительного или отрицательного давления в цистернах (11a-d) соответственно для удаления или подачи текучей среды путем непосредственного добавления положительного или отрицательного давления во внутреннюю часть цистерн (11a-d), которое воздействует непосредственно на поверхность текучей среды в цистернах (11а-d), причем указанные средства (13a-d) являются управляемыми с обеспечением противодействия воздействиям внешних сил на перемещения судна (10).
2. Система по п.1, отличающаяся тем, что она дополнительно содержит средства, такие как датчики/измерители давления, поплавки, датчики пульсации давления для обеспечения информации о состоянии в цистернах (11a-d).
3. Система по п.1, отличающаяся тем, что она дополнительно содержит средства обнаружения информации о перемещениях судна, такие как блок отсчета перемещений, и/или блок отсчета вертикальных смещений, и/или система динамического позиционирования, которые обеспечивают информацию о перемещениях судна (10), главным образом, о вертикальных перемещениях.
4. Система по п.1, отличающаяся тем, что она дополнительно содержит детекторные средства (14), такие как датчики давления, и/или радиолокатор, и/или лазер, и/или устройство для определения характеристик волн, причем указанные средства (14) предпочтительно расположены вдоль бортов судна и предназначены для обеспечения информации о высоте и периоде повторения волны.
5. Система по п.4, отличающаяся тем, что она содержит средства прогнозирования перемещений судна на основе информации о перемещениях судна и/или показаний детекторных средств (14) с обеспечением противодействия движениям волны перед воздействием волны на судно.
6. Система по п.1, отличающаяся тем, что она дополнительно содержит систему управления, предназначенную для регулирования объема текучей среды в цистернах (11a-d) путем создания в цистернах (11a-d) отрицательного давления для балласта или положительного давления для плавучести.
7. Система по п.1, отличающаяся тем, что средства (13a-d) подачи текучей среды в цистерны (11a-d) представляют собой вакуумный/нагнетающий компрессор и/или клапаны, причем по меньшей мере одно из этих средств (13a-d) присоединено к каждой из цистерн (11a-d).
8. Система по п.1, отличающаяся тем, что цистерны (11a-d) приспособлены к судну (10) в отношении размера и формы в доступном пространстве на судне (10) и размещены вблизи передней, задней и/или средней частей судна (10) для обеспечения судна (10) требуемыми характеристиками.
9. Система по п.6, отличающаяся тем, что система управления выполнена с возможностью расчета текущих значений балласта и/или плавучести для различных цистерн (11a-d), основываясь на информации от средств обнаружения/прогнозирования перемещений судна, и/или средств информирования о состоянии в цистернах (11a-d), и/или детекторных средств (14) для информирования о высоте и периоде повторения волны и/или заданных определенных параметрах режима работы судна, и с возможностью обеспечения средств (13a-d) подачи текучей среды в цистерны (11a-d) параметрами настройки.
10. Система по п.1, отличающаяся тем, что она может работать в ручном или автоматическом режиме.
11. Система по п.1, отличающаяся тем, что она дополнительно содержит средства, такие как клапаны, дроссельные заслонки, пропеллеры (20, 21), связанные с отверстиями (12a-d) цистерн (11a-d) и предназначенные для закрытия этих отверстий и/или подачи текучей среды в цистерны (11a-d).
12. Система по п.7, отличающаяся тем, что свободная мощность вакуумных/нагнетательных компрессоров (13a-d) используется для:
обеспечения подачи воздуха в цистерны, расположенные у дна судна, или
перемещения охлаждающей воды из судовых водозаборников морской воды через охлаждающие устройства судна, или
испарения воды из загрязненной трюмной воды и выбрасывания чистого водяного пара наружу в атмосферу.
13. Способ активной стабилизации судна (10), снабженного системой по любому из пп.1-12, отличающийся тем, что он включает следующие этапы:
1 - получение информации о перемещениях судна,
2 - получение информации о состоянии в цистернах системы,
3 - расчет степени заполнения цистерн, то есть должно ли быть давление в цистерне положительным или отрицательным, основываясь на информации, полученной на этапах 1 и 2,
4 - подача в средства регулирования давления в цистернах параметров настройки, основанных на расчете, проведенном на этапе 3,
5 - увеличение или уменьшение давления в цистернах с применением средств регулирования объема текучей среды в цистернах до тех пор, когда средства контроля состояния в цистернах ответят системе управления, соответствующей изобретению, что требуемое положительное или отрицательное давление достигнуто,
6 - повторение этапов 1-5.
14. Способ по п.13, отличающийся тем, что на этапе 1 получают информацию от блока отсчета перемещений, и/или от блока отсчета вертикальных смещений, и/или системы динамического позиционирования, которая содержит информацию о перемещениях судна.
15. Способ по п.13, отличающийся тем, что на этапе 2 получают информацию о состоянии в цистернах с помощью подходящих для этого средств, таких как датчики/измерители давления, поплавки, датчики пульсации давления, которая является исходным условием для системы управления, соответствующей изобретению, для задания, что подавать в цистерны, давление или вакуум.
16. Способ по п.13, отличающийся тем, что на этапах 1 и/или 2 также получают информацию о высоте и периоде повторения волн с помощью предназначенных для этого детекторных средств, причем эта информация обеспечивает возможность для системы управления составить представление о периоде повторения волны, направлении волны и общем изменении плавучести, создаваемом волной.
17. Способ по п.13, отличающийся тем, что на этапах 4 и 5 подают в средства регулирования количества текучей среды в цистернах параметры настройки для достижения требуемого балласта или плавучести в цистернах.
18. Способ по п.17, отличающийся тем, что давление в цистернах увеличивают или уменьшают до тех пор, когда средства контроля состояния цистерн ответят системе управления, что требуемое давление достигнуто.
19. Способ по п.13, отличающийся тем, что этапы с 1 по 5 непрерывно повторяют для приспособления судна к непрерывно изменяющимся внешним условиям, что делает систему самокорректирующейся.
20. Способ пассивной стабилизации судна, снабженного системой по любому из пп.1-12, отличающийся тем, что он включает следующие этапы:
1 - получение информации о перемещениях судна,
2 - получение информации о состоянии в цистернах системы,
3 - расчет, должны ли цистерны иметь уменьшенную и/или увеличенную плавучесть, основываясь на информации, полученной на этапах 1 и 2,
4 - подача в средства регулирования количества текучей среды в цистернах параметров настройки на открытие клапана для подачи текучей среды в цистерны, если требуется уменьшенная плавучесть в цистернах, и/или на закрытие клапана, если требуется увеличенная плавучесть в цистернах.
5 - непрерывное повторение этапов 1-4.
21. Способ по п.20, отличающийся тем, что на этапе 1 получают информацию от блока отсчета перемещений, и/или от блока отсчета вертикальных смещений, и/или системы динамического позиционирования, которая содержит информацию о перемещениях судна.
22. Способ по п.20, отличающийся тем, что на этапе 2 получают информацию о состоянии в цистернах с помощью подходящих для этого средств, таких как датчики/измерители давления, поплавки, датчики пульсации давления, которая является исходным условием для системы управления, соответствующей изобретению, для задания, что подавать в цистерны, положительное или отрицательное давление.
23. Способ по п.20, отличающийся тем, что на этапах 1 и/или 2 также получают информацию о высоте и периоде повторения волны с помощью подходящих для этого детекторных средств, причем эта информация обеспечивает возможность для системы управления составить представление о периоде повторения волны, направлении волны и общем изменении плавучести, создаваемом волной.
24. Способ по любому из пп.20-23, отличающийся тем, что если на этапах 1 и 2 не получают информации, то клапан может регулироваться вручную с использованием испытаний и опыта для наилучшего возможного действия.
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРЕДОТВРАЩЕНИЯ ВЫДЕЛЕНИЯ РАСПЛАВЛЕННОГО МЕТАЛЛА ЧЕРЕЗ ВЕРТИКАЛЬНЫЙ ЗАЗОР МЕЖДУ ДВУМЯ ГОРИЗОНТАЛЬНО РАСПОЛОЖЕННЫМИ ЭЛЕМЕНТАМИ | 1994 |
|
RU2091192C1 |
| US 4167147 A, 11.09.1979 | |||
| СОСТАВ ДЛЯ ТЕРМОИНДИКАТОРА | 2006 |
|
RU2343434C2 |
| US 4231313 A, 04.11.1980 | |||
| ПАССИВНЫЙ УСПОКОИТЕЛЬ БОРТОВОЙ КАЧКИ СУДНА | 1992 |
|
RU2047538C1 |

