Настоящая заявка испрашивает приоритет согласно Заявке на патент КНР №200910178572.8, озаглавленной как «Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы и ее система управления» и поданной в патентное ведомство Китая 29 сентября 2009 года, содержание которой в полном объеме включено в данный документ в порядке ссылки.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу управления одноцилиндровой штифтовой телескопической стрелой, в частности к способу оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелой.
УРОВЕНЬ ТЕХНИКИ
Существуют два типа телескопических конструкций стрел, применяемых в существующих строительных машинах: телескопический гидравлический цилиндр тросового типа и одноцилиндрового штифтового типа. Для крана большой грузоподъемности с 5 или более секциями стрел только одноцилиндровая штифтовая конструкция является применимой из-за ограничения формы конструкции.
Принцип работы одноцилиндрового штифтового телескопического механизма: телескопический гидравлический цилиндр монтируется в стрелу, штифтовой механизм монтируется в головку телескопического гидравлического цилиндра, а рабочий штифт устанавливается на штифтовой механизм. Каждая секция стрелы имеет отверстия для опорных штифтов, распределенные в положениях примерно 0%, 46%, 90% и 100% по длине, и отверстие для рабочего штифта в хвостовой части; более того, каждая секция стрелы имеет опорный штифт в хвостовой части для замкового соединения соседних секций стрелы друг с другом. Когда стрела выдвигается или втягивается, телескопический гидравлический цилиндр перемещает затворный механизм в хвостовую часть секции j, телескопический гидравлический цилиндр фиксируется замковым соединением к секции j посредством выдвижения рабочего штифта, а опорный штифт секции j, вставленный в секцию j-1, втягивается. Когда телескопический гидравлический цилиндр выдвигается (втягивается), секция j передвигается вместе с телескопическим гидравлическим цилиндром (выдвигается или втягивается); при достижении заданного положения, штифтовой механизм высвобождает опорный штифт таким образом, чтобы секция j зафиксировалась замковым соединением с секцией j-1 относительно, и тем самым совершается выдвижение или втягивание секции j. При повторении процесса совершается выдвижение или втягивание каждой секции, и, таким образом, в итоге совершается выдвижение или втягивание всей стрелы.
Существующая техническая схема процесса перехода из положения А в положение В: вначале стрела переводится из положения А в полностью втянутое положение, а затем секции выдвигаются в соответствии с необходимым заданным положением для достижения положения В. При этом телескопические механизмы выполняют излишние операции с задействованием секций; таким образом, выполняются излишние операции, которым подвергаются соответствующие детали и узлы, в том числе выдвижные блоки стрелы, телескопический гидравлический цилиндр, штифтовой механизм и двигатель. Очевидно, такой переход имеет недостатком низкую эффективность выдвижения/втягивания. Главным образом, при каждой излишней операции, связанной с извлечением штифта, штифтовой механизм несет нагрузку стрелы до десятка тонн, и, таким образом, срок службы штифтового механизма значительно сокращается. Хорошо известно, что отказ штифтового механизма может привести к тяжелым последствиям, таким как повреждение оборудования и причинение травм или гибель людей.
В действительности, для крана со стрелой, состоящей из n секций с четырьмя отверстиями для опорных штифтов на каждой секции, стрела, к примеру, может иметь 4n положений и P(4n,2) переходов между двумя положениями. Например, телескопическая стрела, состоящая из пяти секций, может иметь 4×4×4×4×4=1024 положений, то есть существует 45!/(45-2)!=1024!/1022!=1047552 способов переключения между двумя положениями.
В свете вышеизложенной проблемы актуальная задача заключается в оптимизации управления выдвижением/втягиванием существующих одноцилиндровых штифтовых телескопических стрел, чтобы приспособиться к переключению между любыми двумя положениями стрелы, состоящей из любого количества секций.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В свете вышеописанного недостатка задача настоящего изобретения заключается в создании способа оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, который определяет оптимальную последовательность операций секций между двумя положениями из многочисленных вариантов переключения и обеспечивает тем самым наиболее быстрое и удобное телескопическое перемещение. На этом основании настоящее изобретение дополнительно обеспечивает систему оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы.
Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, предлагаемый в настоящем изобретении, включает следующие этапы:
(1) получение ряда начального положения A[a1, a2, а3,… aj,… an] и ряда заданного положения B[b1, b2, b3, …, bj, …, bn] телескопической стрелы, где n~ количество секций телескопической стрелы, j~ целое число, которое удовлетворяет 1≤j≤n и означает любую секцию телескопической стрелы; aj и bj ~ целые числа в диапазоне 0-3 соответственно и означают, что секция зафиксирована через опорный штифт с одним из четырех отверстий для штифта в предыдущей секции; получение n_code секции телескопической стрелы, где находится телескопический механизм;
(2) проведение расчета по нижеследующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
(3) определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из начального положения ряда в заданное положение ряда в соответствии с определенным результатом;
(4) вывод управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, для корректировки согласованных операций между штифтовым механизмом и телескопическим цилиндром для управления последовательностью операций секций в процессе переключения из начального положения в заданное положение.
Предпочтительно на этапе (2) проводят расчет по формуле для получения промежуточного параметра Sx после выполнения нижеследующих этапов:
(21) устанавливают i=n и устанавливают значение ноль для промежуточной переменной;
(22) определяют, является ли аi равным bi; если нет, выполняют этап (23);
(23) j=1, получают ряды А1 и В1, исключая последние равные члены;
На этапе (3) вектор перемещения получают посредством выполнения расчета по нижеследующим этапам:
(31) определяют является ли Si больше 2; если да, выполняют этап (32);
(32) определяют, является ли каждое Sx-1 меньше или равным 2; если да, выполняют этап (321) и Cj=заменяют член j в А1 на Min(1, bj); в противном случае выполняют этап (322) и Cj=заменяют член j в А1 на 0;
(33) определяют, является ли Cj равным В1; если да, выполняют этап (34); в противном случае устанавливают A1=Cj, ggx=j, j=j+1, а затем возвращаются к этапу (2);
(34) объединяют подобные члены в ряды С1, С2, С3,…, добавляют и дополняют последние неизменные члены, а затем выводят результат.
Предпочтительно, если результат определения на этапе (22) является положительным, выполняют этап (24), а затем возвращаются к этапу (22);
этап (24): устанавливают i=i-1.
Предпочтительно, если результат определения на этапе (31) является отрицательным, выполняют нижеследующие этапы:
(40) устанавливают j=1;
(41) определяют, является ли ggx равным 0; если да, выполняют этап (42); в противном случае устанавливают n_code=ggx, a затем выполняют этап (42);
(42) определяют, является ли n_code меньше i; если да, выполняют этап (43); в противном случае выполняют этап (45);
(43) Dj=заменяют член n_code в А1 на bn_code и проводят расчет по нижеследующей формуле для получения промежуточного параметра Sx:
(44) определяют, является ли каждое значение Sx меньше или равным 2; если нет, выполняют этап (45);
(45) Dj=заменяют член i вА1 на bi, устанавливают ggx=i;
(46) определяют, является ли Dj равным В1; если да, выполняют этап (47);
(47) объединяют подобные члены в рядах С1, С2, С3,…, D1, D2, D3,…, добавляют и дополняют последние неизменные члены, а затем выводят результат.
Предпочтительно, если определенный результат на этапе (44) является положительным, выполняют этап (51);
(51) Dj=заменяют член n_code вА1 на bn_code, устанавливают ggx=n_code и N=True (истинно), а затем выполняют этап (46);
Предпочтительно, если определенный результат на этапе (46) является отрицательным, выполняют нижеследующие этапы:
(61) определяют является ли N True (истинно); если ответ положителен, устанавливают N=False (ложно), а затем выполняют этап (62); в противном случае устанавливают i=i-1, а затем выполняют этап (62);
(62) устанавливают A1=Dj, j=j+1, Dj=заменяют член i в А1 на bi, ggx=i, а затем выполняют этап (46).
Предпочтительно выполняют этап (25) после этапа (23):
(25) определяют, является ли только аi не равным 0 в А1; если да, выполняют этап (40); в противном случае продолжают выполнять этап (2); и устанавливают для x минимальное значение 2 на этапе (43).
Предпочтительно выполняют этап (323) после этапа (321):
(323) Рассчитывают Si из Cj и В1, определяют, является ли Si больше 2; если да, выполняют этап (322); в противном случае выполняют этап (33).
Система оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, предложенная в настоящем изобретении, содержит:
устройство ввода, выполненное с возможностью получения ряда начального положения A[a1, a2, а3,… aj,…, an] и ряда заданного положения B[b1, b2, b3,…, bj,…, bn] телескопической стрелы, где n - количество секций телескопической стрелы, j - целое число, которое удовлетворяет 1≤j≤n и означает любую секцию телескопической стрелы; aj и bj являются целыми числами в диапазоне 0~3 соответственно и означают, что секция зафиксирована через опорный штифт с одним из четырех отверстий для штифта в предыдущей секции; получение n_code секции телескопической стрелы, где находится телескопический механизм;
контроллер, выполненный с возможностью проведения расчета по нижеследующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из начального положения ряда в заданное положение ряда в соответствии с определенным результатом; и
устройство вывода, выполненное с возможностью вывода управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, для корректировки согласованных операций между штифтовым механизмом и телескопическим цилиндром таким образом, чтобы управлять последовательностью операций секций в процессе переключения из начального положения в заданное положение.
Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы применяется для переключения между любыми двумя рабочими положениями телескопической стрелы, состоящей из любого количества секций. Настоящее изобретение определяет ограничивающие условия в соответствии с ходом телескопического гидравлического цилиндра и может быть использовано для получения самого быстрого и удобного телескопического выдвижения/втягивания на основании текущего положения штифтового механизма и других условий, когда телескопическая стрела переходит из текущего положения А в заданное положение В. По сравнению с предшествующим уровнем техники настоящее изобретение может в значительной степени повысить надежность телескопической конструкции и эффективность эксплуатации одноцилиндровых штифтовых телескопических стрел.
Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы и ее система, предложенные в настоящем изобретении, могут применяться к одноцилиндровым штифтовым телескопическим стрелам на любых строительных машинах, главным образом к телескопическим стрелам на кранах большой грузоподъемности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг.1 показана блок-схема примера осуществления способа оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, раскрытого в настоящем изобретении;
на фиг.2 показана блок-схема другого примера осуществления способа оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, раскрытого в настоящем изобретении;
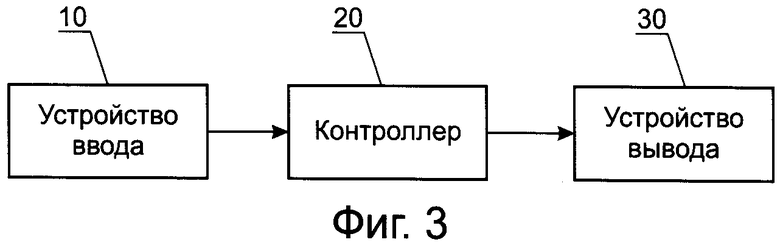
на фиг.3 показана блок-схема системы оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, описанной в примерах осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ
На основании существующих одноцилиндровых штифтовых телескопических механизмов, суть настоящего изобретения заключается в создании математической модели, определении ограничивающих условий в соответствии с ходом телескопического гидравлического цилиндра и получении наиболее быстрого и удобного телескопического выдвижения/втягивания оптимизированным способом для значительного повышения надежности телескопической конструкции и эффективности эксплуатации одноцилиндровых штифтовых телескопических стрел.
Ниже по тексту будут подробно описаны примеры осуществления настоящего изобретения со ссылками на прилагаемые чертежи.
Обратимся к фиг.3, которая представляет собой блок-схему системы оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы в примерах осуществления настоящего изобретения.
Система оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы содержит устройство ввода 10, контроллер 20 и устройство вывода 30,
где устройство ввода 10 выполнено с возможностью получения ряда начального положения A[a1, a2, а3,… aj,…, an] и ряда заданного положения B[b1, b2, b3,…, bj,…, bn] телескопической стрелы, где n - количество секций телескопической стрелы, j - целое число, удовлетворяющее 1≤j≤n и означающее любую секцию телескопической стрелы; aj и bj - целые числа в диапазоне 0~k-1 соответственно и означают, что секция зафиксирована через опорный штифт с одним из к отверстий для штифта в предыдущей секции; получение n_code секции телескопической стрелы, где находится телескопический механизм. Следует отметить, что схема расположения отверстий для опорных штифтов в каждой секции стрелы соответствует следующим требованиям: сумма расстояний между соседними тремя отверстиями в каждой секции А+расстояние между соседними двумя отверстиями в любой другой секции В>телескопического хода телескопического гидравлического цилиндра. Подразумевается, что, по меньшей мере, расстояния между тремя соседними отверстиями около хвоста стрелы соответствуют вышеизложенным требованиям;
где контроллер 20 выполнен с возможностью проведения расчета по следующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из начального положения ряда в заданное положение ряда в соответствии с рассчитанным результатом;
где устройство вывода 30 выполнено с возможностью вывода управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, корректировки согласованных операций между штифтовым механизмом и телескопическим цилиндром для управления последовательностью операций секций в процессе переключения из начального положения в заданное положение.
Способ управления, использующийся системой, показан фиг.1, которая является блок-схемой первого примера осуществления способа оптимизированного управления, раскрытого в настоящем изобретении.
Как видно на фиг.1, способ управления включает следующие этапы:
(1) Получение ряда начального положения A[a1, a2, а3,… aj,…, an] и ряда заданного положения B[b1, b2, b3,…, bj,…, bn] телескопической стрелы, где n - количество секций телескопической стрелы, j - целое число, которое удовлетворяет 1≤j≤n и означает любую секцию телескопической стрелы; aj и bj - целые числа в диапазоне 0~к-1 соответственно, означают, что секция зафиксирована через опорный штифт с одним из k отверстий для штифта в предыдущей секции; получение n_code секции телескопической стрелы, где находится телескопический механизм. Подразумевается, что количество секций телескопической стрелы и количество отверстий для штифтов в каждой секции может быть выбрано свободно по необходимости.
(2) Проведение расчета по следующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
(3) Определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из ряда начального положения в ряд заданного положения в соответствии с рассчитанным результатом.
(4) Вывод управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, корректировка согласованных операций между штифтовым механизмом и телескопическим цилиндром для управления последовательностью операций секций в процессе переключения из начального положения в заданное положение.
Предпочтительно на этапе (2) проводят расчет по формуле для получения промежуточного параметра Sx после выполнения нижеследующих этапов:
(21) i=n, устанавливают значение ноль для промежуточной переменной;
(22) определяют является ли ai равным bi; если нет, выполняют этап (23);
(23) j=1, получают ряды А1 и В1, исключив последние равные члены;
На этапе (3) вектор перемещения получается посредством проведения расчета через нижеследующие этапы:
(31) определяют, является ли Si больше 2; если да, выполняют этап (32);
(32) определяют, является ли каждое значение Sx-1 меньшим или равным 2; если да, выполняют этап (321) и Cj=заменяют член j в А1 на Min(1, bj); в противном случае выполняют этап (322) и Cj=заменяют член j в А1 на 0;
(33) определяют, является ли Cj равным В1; если да, выполняют этап (34); в противном случае устанавливают A1=Cj, ggx=j, j=j+1, а затем возвращаются к этапу (2);
(34) объединяют подобные члены в рядах С1, С2, С3,…, добавляют и дополняют последние неизменные члены, а затем выводят результат.
Предпочтительно, если рассчитанный результат на этапе (22) является положительным, выполняют этап (24), а затем возвращаются к этапу (22):
этап (24): устанавливают i=i-1.
Предпочтительно, если рассчитанный результат на этапе (31) является отрицательным, выполняют нижеследующие этапы:
(40) устанавливают j=1;
(41) определяют является ли ggx равным 0; если да, выполняют этап (42); в противном случае устанавливают n_code=ggx, а затем выполняют этап (42);
(42) определяют, является ли n_code меньше i; если да, выполняют этап (43); в противном случае выполняют этап (45);
(43) Dj=заменяют член n_code в А1 на bn_code и выполняют расчет по нижеследующей формуле для получения промежуточного параметра Sx:
(44) определяют, является ли каждое Sx меньше или равным 2; если нет, выполняют этап (45);
(45) Dj=заменяют член i в А1 на bi, устанавливают ggx=i;
(46) определяют, является ли Dj равным В1; если да, выполняют этап (47).
(47) объединяют подобные члены в рядах С1, С2, С3,…, D1, D2, D3,…, добавляют и дополняют последние неизменные члены, а затем выводят результат.
Предпочтительно, если рассчитанный результат на этапе (44) является положительным, выполняют этап (51);
(51) Dj=заменяют член n_code в А1 на bn_code, устанавливают ggx=n_code и N=True (истинно), а затем выполняют этап (46).
Предпочтительно, если рассчитанный результат на этапе (46) является отрицательным, выполняют нижеследующие этапы:
(61) определяют является ли N True (истинно); если ответ положителен, устанавливают N=False (ложно), а затем выполняют этап (62); в противном случае устанавливают i=i-1, а затем выполняют этап (62);
(62) устанавливают A1=Dj, j=j+1, Dj=заменяют член i в А1 на bi, ggx=i, а затем выполняют этап (46).
Без ограничения универсальности и применимости ниже по тексту настоящее изобретение будет описываться на примере телескопической стрелы, состоящей из пяти секций с четырьмя отверстиями под опорные штифты в каждой секции:
Ряд текущего положения стрелы: А[1,1,2,0,0];
Ряд заданного положения: В[2,0,3,1,1];
Секция, где находится телескопический механизм: n_code=2
1. этап (21): устанавливают i=5 (общее количество секций), ggx=0 (устанавливают ноль для значения секции ggx, где телескопический механизм находится в процессе переключения);
этап (22): а5=0, b5=1 и результат вычисления является отрицательным;
этап (23): устанавливают j=1, поскольку равного члена между текущим положением ряда стрелы А[1,1,2,0,0] и заданным положением ряда В[2,0,3,1,1] - нет; затем получить А1[1,1,2,0,0], В1[2,0,3,1,1];
этап (2): устанавливают х=5, 4, 3, 2 соответственно и рассчитывают S5, S4, S3 и S2 соответственно:

Подобным образом рассчитано, что S4=5; S3=5, S2=2;
этап (32): Cj=заменяют член j в А1 на 0 в соответствии с блок-схемой;
Тогда: С1=[0,1,2,0,0]---ggx=1
этап (33): Поскольку С1=[0,1,2,0,0] не равно В1[2,0,3,1,1], возвращаются к выполнению этапа (2).
2. i=5, j=2, A1=[0,1,2,0,0], B1=[2,0,3,1,1],
т.е. устанавливают х=5, 4, 3 и рассчитывают S5, S4 и S2 соответственно;
S5=4, S4=4, S3=4;
Cj=заменяют член j вА1 на 0 в соответствии с блок-схемой;
Тогда: С2=[0, ,2,0,0]---ggx=2
Таким же образом, поскольку С2=[0,0,2,0,0] не равно В1 [2,0,3,1,1], возвращаются к выполнению этапа (2).
3. i=5, j=3, A1=[0,0,2,0,0], B1=[2,0,3,1,1],
т.е. устанавливают х=5, 4 и рассчитывают S5 и S4 соответственно;
S5=3, S4=3;
Cj=заменяют член j в А1 на Min(1, bj) в соответствии с блок-схемой;
Тогда: С3=[0, 0, 1, 0, 0]---ggx=3
Следует отметить, что С3=[0,0,0,0,0]---ggx=3 в случае, если не используется оптимизированный порядок выполнения действий;
Таким же образом, поскольку С3=[0,0,1,0,0] не равно В1[2,0,3,1,1], возвращаются к выполнению этапа (2).
4. i=5, j=4, A1=[0,0,1,0,0], B1=[2,0,3,1,1], т.е. устанавливают х=5 и рассчитывают S5;
S5=2; поскольку значение S5 не больше 2, выполняют:
этап (40): устанавливают j=1;
этап (41): Поскольку ggx=3 и не равно 0, то n_code=ggx=3;
этап (42): Поскольку n_code=3 и меньше i,
Тогда D1=[0,0,3,0,0]---ggx=3; рассчитывают и определяют:
т.е. устанавливают х=5, 4, 3 и рассчитывают S5, S4 и S3 соответственно;
S5=4, S4=4, S3=3;
Dj=заменяют член i в А1 на bi, ggx=i в соответствии с блок-схемой;
Тогда: D1=[0,0,1,0,1]---ggx=5
этап (46): Поскольку D1 не равно В1, выполняют этап (61).
5. i=M=4, A1=D1=[0,0,1,0,1], j=j+1=2, B1=[2,0,3,1,1];
Dj=заменяют член i в А1 на bi, ggx=i в соответствии с блок-схемой;
Тогда: D2=[0,0,1,1,1]---ggx=4
6. В соответствии с блок-схемой i=i-1=3, j=j+1=3, B1=[2,0,3,1,1], A1=D2=[0,0,1,1,1] Dj=заменяют член i в А1 на bi, ggx=i в соответствии с блок-схемой;
Тогда: D3=[0,0,3,1,1]---ggx=3
7. В соответствии с блок-схемой i=i-1=2, j=j+1=4, B1=[2,0,3,1,1], A1=D3=[0,0,3,1,1] Dj=заменяют член i в А1 на bi, ggx=i в соответствии с блок-схемой;
Тогда: D4=[0,0,3,1,1]---ggx=2
8. В соответствии с блок-схемой i=i-1=1, j=j+1=5, B1=[2,0,3,1,1], A1=D4=[0,0,3,1,1] Dj=заменяют член i в А1 на bi, ggx=i в соответствии с блок-схемой;
Тогда: D5=[2,0,3,1,1]---ggx=1
В заключение очередность телескопического перемещения составляет:
С1=[0,1,2,0,0]---ggx=1
C2=[0,0,2,0,0]---ggx=2
C3=[0,0,1,0,0]---ggx=3 (В случае если не используется оптимизированный порядок выполнения действий, то С3=[0,0,0,0,0]---ggx=3)
D1=[0,0,1,0,1]---ggx=5
D2=[0,0,1,1,1]---ggx=4
D3=[0,0,3,1,1]---ggx=3
D4=[0,0,3,1,1]---ggx=2 --- Поскольку данный член равняется D3, подобные члены объединяют.
D5=[2,0,3,1,1]---ggx=1.
В настоящем изобретении предлагается другой пример осуществления способа оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы. Рассмотрим фиг.2, которая представляет блок-схему второго примера осуществления способа оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы.
Как видно из фиг.1 и фиг.2, данный пример осуществления по конструктивным принципам полностью совпадает с первым примером осуществления. Отличия заключаются в следующем:
во-первых, этап (25) выполняют после этапа (23):
(25) определяют является ли аi не равным 0 в А1, если да, выполняют этап (40); в противном случае продолжают выполнение этапа (2); и
устанавливают минимальное значение х равным 2 на этапе (43).
Ниже по тексту данная конструкция будет описана на примере телескопической стрелы, состоящей из пяти секций с четырьмя отверстиями для опорных штифтов в каждой секции:
Ряд текущего положения стрелы: А[0,0,2,0,0];
Ряд заданного положения: В[0,0,3,0,0];
Секция, где находится телескопический механизм: n_code=1;
Общее количество секций: i=5.
1. этап (21); устанавливают i=5 (общее количество секций), ggx=0 (устанавливают значение ноль для секции ggx, где телескопический механизм находится в процессе переключения);
этап (22): а5=0, b5=0 и результат расчета является положительным;
этап (24): устанавливают i=i-1=4;
этап (22): а4=0, b4=0 и результат расчета является положительным;
этап (24): устанавливают i=i-1=3;
этап (22): а3=2, b3=3 и результат расчета является отрицательным;
этап (23): устанавливают j=1, поскольку последние два члена равны между рядом текущего положения стрелы А[0,0,2,0,0] и рядом заданного положения В[0,0,3,0,0]; тогда получают А1 [0,0,2], В1 [0,0,3].
этап (2): устанавливают х=3, 2 и рассчитывают S3 и S2 соответственно;

Подобным образом рассчитано, что S2=0;
этап (32): Cj=заменяют значение члена j в А1 на минимальное значение члена 1 и bj в соответствии с блок-схемой;
то: С1=[0,0,2]---ggx=1;
этап (323): Si=S3=3 и результат расчета является положительным;
этап (322): заменяют значение члена j в А1 на 0, устанавливают j=1, С1=[0,0,2];
этап (33): Поскольку С1=[0,0,2] не равно В1[0,0,3], возвращаются к выполнению этапа (2).
2. i=3, j=2, A1=[0,0,2], B1=[0,0,3],
т.е. х=3; рассчитывают S3;
S3=3;
Cj=заменяют значение члена j в А1 на минимальное значение члена 1 и bj в соответствии с блок-схемой; то: С2=[0,0,2]---ggx=2
этап (323), Si=S3=3 и определенный результат является положительным;
этап (322): заменяют член j вА1 на 0, устанавливают j=2, C2=[0,0,2];
Таким же образом, поскольку С2=[0,0,2] не равно В1[0,0,3], возвращаются к выполнению этапа (2).
3. i=3, j=3, A1=[0,0,2], B1=[0,0,3],
т.е. х=3 рассчитывают S3;
Здесь, собственно говоря, Sx не может быть рассчитано обычным образом. После добавления этапа (25) в предпочтительную схему вычисления выполняют этап (40);
этап (40): устанавливают j=1;
этап (41): ggx=0 истинно;
этап (42): n_code=1 и это меньше, чем i;
Затем выполняют этап (43):
D1=[0,0,2], x=3, 2, рассчитывают S3, S2;
S3=3, S2=0;
этап (44): значения S3 и S2 не меньше 2;
этап (45): D1=[0,0,3]---ggx=3;
этап (46): Поскольку D1 не равно В1, выполняют этап (47). В итоге телескопическое перемещение составляет:
D1=[0,0,3]---ggx=3.
Во-вторых, этап (323) выполняют после этапа (321):
(323) рассчитывают Si из Cj и В1, определяют, является ли значение 8, больше 2; если да, выполняют этап (322); в противном случае выполняют этап (33).
Ниже по тексту данная конструкция будет описываться на примере телескопической стрелы, состоящей из пяти секций с четырьмя отверстиями для опорных штифтов в каждой секции:
Ряд текущего положения стрелы: А[0,0,0,1,2];
Ряд заданного положения: В[2,0,0,1,1];
Секция, где находится телескопический механизм: n_code=1;
Общее количество секций: i=5.
1. этап (21): устанавливают i=5 (общее количество секций), ggx=0 (устанавливают значение ноль для секции ggx, где телескопический механизм находится в процессе переключения);
этап (22): a5=2, b5=1, и результат расчета отрицательный;
этап (23): устанавливают j=1, поскольку равного члена между рядом текущего положения стрелы А[0,0,0,1,2] и рядом заданного положения В[2,0,0,1,1] - нет; затем получают А1[0,0,0,1,2], В1[2,0,0,1,1].
этап (2): устанавливают х=5, 4, 3, 2 соответственно и рассчитывают S5, S4, S3 и S2 соответственно

Подобным образом рассчитывают, что S4=1; S3=0, S2=0;
Поскольку условие этапа (32) соблюдено, Cj=заменяют член j в А1 на Min(1, bj) в соответствии с блок-схемой;
Тогда: С1=[1,0,0,1,2]---ggx=1
В данном случае, если в этап (323) не добавляется вычисление, то С1[1,0,0,1,2]. Поскольку 2 является последней секцией, она не находится на пути хода гидравлического цилиндра.
В предпочтительной схеме вычисление добавляется в этап (323) во избежание вышеуказанной проблемы. Таким образом, в данном способе выполняют этап (323), а затем в соответствии с Cj и В1 определяют, находится ли последняя секция в пределах телескопического хода гидравлического цилиндра.
этап (323): рассчитывают S5=4 в соответствии с С1=[1,0,0,1,2] и В1[2,0,0,1,1]; поскольку S5>2, условие определено, как истинное.
выполняют этап (322), Cj=заменяют член j в А1 на 0 в соответствии с блок-схемой;
То: С1=[0,0,0,1,2]---ggx=1;
этап (33): Поскольку С1=[0,0,0,1,2] не равно В1[2,0,0,1,1], возвращаются к выполнению этапа (25);
этап (25): определяют, что условие не является истинным;
этап (2): i=5, j=2, A1=[0,0,0,1,2], В1=[2,0,0,1,1],
т.е. устанавливают х=5, 4, 3 и рассчитывают S5, S4 и S3 соответственно;
S5=3, S4=1, S3=0;
выполняют этап (321), Cj=заменяют член j в А1 на Min(1, bj) в соответствии с блок-схемой;
Тогда, этап (321): С2=[0,0,0,1,2]
этап (323): i=5, j=2, С2=[0,0,0,1,2], В1=[2,0,0,1,1],
т.е. получают S3=3;
Cj=заменяют член j в А1 на значение 0 в соответствии с блок-схемой;
То: С2=[0,0,0,1,2]---ggx=2
этап (33): Поскольку С1=[0,0,0,1,2] не равно В1[2,0,0,1,1], возвращаются к выполнению этапа (25);
этап (25): определяют, что условие не является истинным;
этап (2): i=5, j=3, A1=[0,0,0,1,2], B1=[2,0,0,1,1],
т.е. устанавливают х=5, 4 и рассчитывают S5 и S4 соответственно;
S5=3, S4=1;
Cj=заменяют член j в А1 на Min(1, bj) в соответствии с блок-схемой;
То этап (321): С3=[0,0,0,1,2];
этап (323): i=5, j=3, С3=[0,0,0,1,2], В1=[2,0,0,1,1], т.е. получают S5=3;
Cj=заменяют член j в А1 на значение 0 в соответствии с блок-схемой;
То: С3=[0,0,0,1,2]---ggx=3
Таким же образом, поскольку С3=[0,0,0,1,2] не равняется В1 [2,0,0,1,1], возвращаются к выполнению этапа (25);
этап (25): определяют, что условие не является истинным;
этап (2): i=5, j=4, A1=[0,0,0,1,2], В1=[2,0,0,1,1],
т.е. устанавливают х=5 и получают S5=3;
Cj=заменяют член j в А1 на Min(1, bj) в соответствии с блок-схемой;
То этап (321): С4=[0,0,0,1,2];
этап (323): i=5, j=4, С4=[0,0,0,1,2], В1=[2,0,0,1,1],
т.е. получают S5=3;
Cj=заменяют член j в А1 на значение , в соответствии с блок-схемой;
То: С2=[0,0,0,0,2]---ggx=4
Таким же образом, поскольку С3=[0,0,0,0,2] не равняется В1[2,0,0,1,1], возвращаются к выполнению этапа (25);
этап (25): определяют, что условие является истинным;
этап (40): устанавливают j=1;
этап (41); ggx=4 и не равно 0, то n_code=ggx=4;
этап (42): n_code=4 и меньше i;
То: D1=[0,0,0,1,2], B1=[2,0,0,1,1] и n_code=4; рассчитывают и определяют:
т.е. устанавливают х=5, 4 и рассчитывают S5 и S4 соответственно;
S5=3, S4=1;
этап (44): условие не является истинным;
Dj=заменяют член i в А1 на bi, ggx=i=5 в соответствии с блок-схемой;
Тогда: D1=[0,0,0,0,1]---ggx=5
этап (46): D1 не равно В1, тогда выполняют этап (61), N=TRUE (истинно) не является истинным.
В соответствии с блок-схемой i=i-1=4, теперь D1=[0,0,0,0,1], j=1, B1=[2,0,0,1,1];
этап (62): A1=D1=[0,0,0,0,1], j=j+1=2, Dj=заменяют член i вА1 на bi, ggx=i;
Тогда D2=[0,0,0,1,1]---ggx=4.
В соответствии с блок-схемой i=i-1=3, теперь D2=[0,0,0,1,1], j=2, B1=[2,0,0,1,1];
этап (62): A1=D2=[0,0,0,1,1], j=j+1=3, Dj=заменяют член i в А1 на bi, ggx=i;
Тогда: D3=[0,0,0,1,1]---ggx=3
В соответствии с блок-схемой i=i-1=2, теперь D3=[0,0,0,1,1], j=3, B1=[2,0,0,1,1];
этап (62): A1=D3=[0,0,0,1,1], j=j+1=4, Dj=заменяют член i в А1 на bi, ggx=i;
Тогда: D4=[0,0,0,1,1]---ggx=2.
В соответствии с блок-схемой i=i-1=1, теперь D4=[0,0,0,1,1], j=4, B1=[2,0,0,1,1];
этап (62): A1=D4=[0,0,0,1,1], j=j+1=5, Dj=заменяют член i в А1 на bi, ggx=i;
Тогда: D5=[2,0,0,1,1]---ggx=1
этап (46): D5=B1 В итоге телескопические перемещения составляют:
С1=[0,0,0,1,2]---ggx=1
C2=[0,0,0,1,2]---ggx=2
C3=[0,0,0,1,2]---ggx=3
C4=[0,0,0,0,2]---ggx=4
D1=[0,0,0,0,1]---ggx=5
D2=[0,0,0,1,1]---ggx=4
D3=[0,0,0,1,1]---ggx=3
D4=[0,0,0,1,1]---ggx=2
D5=[2,0,0,1,1]---ggx=1 объединяют подобные члены, тогда:
C4=[0,0,0,0,2]---ggx=4
D1=[0,0,0,0,1]---ggx=5 ---
Если не используется оптимизированный порядок выполнения действий, тогда
[0,0,0,0,0]---ggx=5;
[0,0,0,0,1]---ggx=5;
D2=[0,0,0,1,1]---ggx=4;
D5=[2,0,0,1,1]---ggx=1.
Из вышеприведенного описания примеров осуществления видно: способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы применяется для переключения между любыми двумя рабочими положениями телескопической стрелы, состоящей из любого количества секций. По сравнению с прототипом способ в настоящем изобретении определяет ограничивающие условия в соответствии с ходом телескопического гидравлического цилиндра и может быть использован для получения наиболее быстрого и удобного телескопического перемещения на основе текущего положения штифтового механизма и других условий, когда телескопическая стрела переходит из текущего положения А в заданное положение В, тем самым в значительной степени повышая надежность телескопической конструкции и эффективность эксплуатации одноцилиндровых штифтовых телескопических стрел.
Хотя настоящее изобретение изображено и описано со ссылкой на некоторые предпочтительные примеры осуществления, настоящее изобретение не ограничивается ими. Специалисты в данной области техники должны понимать, что можно создавать разные вариации и модификации, не выходя за пределы существа и объема настоящего изобретения. Например, в каждой секции можно образовать множество отверстий для опорных штифтов помимо четырех отверстий для опорных штифтов. Все такие вариации и модификации следует считать подпадающими под защищаемый объем настоящего изобретения.
Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы и ее система управления применяются для переключения между любыми двумя рабочими состояниями любых секций телескопической стрелы. Способ и система определяют ограничивающее условие в соответствии с ходом телескопического гидравлического цилиндра. Когда телескопическая стрела переходит из текущего положения А в заданное положение В, можно получить наиболее быстрое и удобное телескопическое перемещение на основании текущего положения штифтового механизма и других условий. Способ и система в значительной степени повышают надежность телескопической конструкции и эффективность эксплуатации одноцилиндровой штифтовой телескопической стрелы и применимы к телескопической стреле любой строительной машины, в частности к телескопической стреле крана большой грузоподъемности. 2 н. и 7 з.п. ф-лы, 3 ил.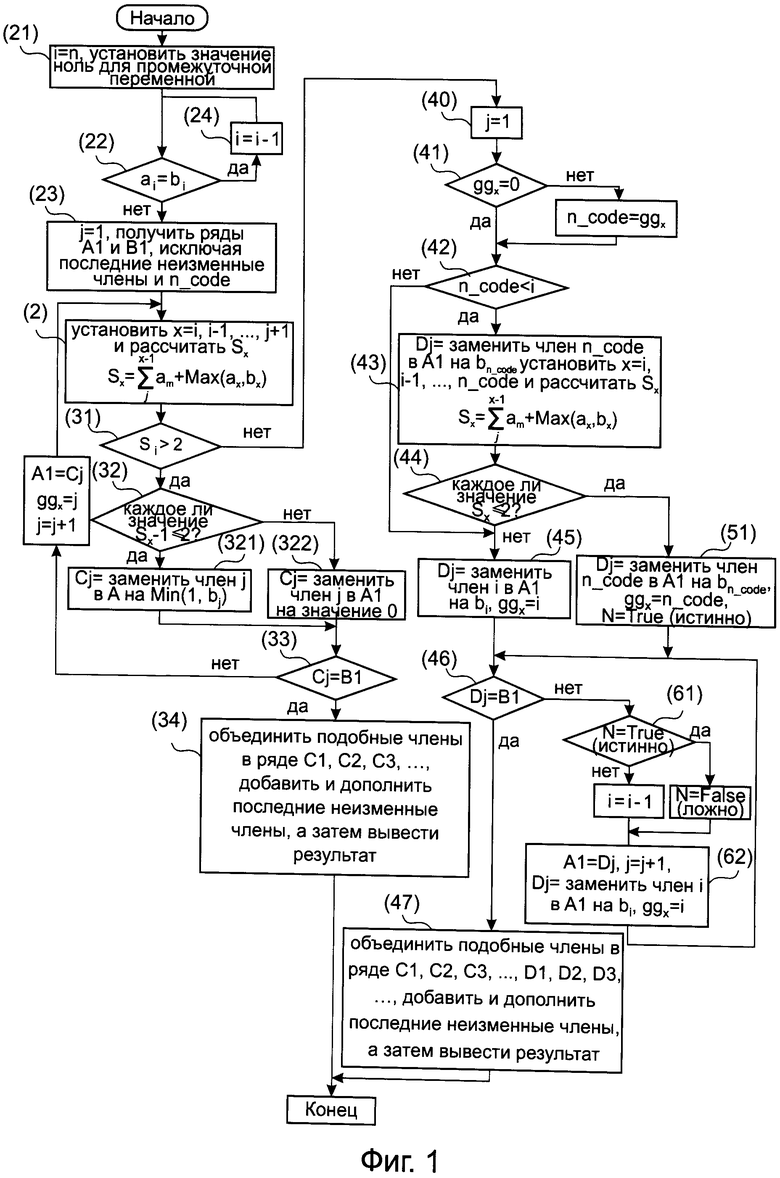
1. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, включающий нижеследующие этапы:
(1) получение ряда начального положения A[a1,a2,а3,…aj,…,an] и ряда заданного положения B[b1,b2,b3,…,bj,…,bn] телескопической стрелы, где n - количество секций телескопической стрелы, j - целое число, которое удовлетворяет 1≤j≤n и означает любую секцию телескопической стрелы; aj и bj - целые числам в диапазоне 0~3 соответственно и означают, что секция зафиксирована через опорный штифт с одним из четырех отверстий для штифта в предыдущей секции; получение n_code - значения секции телескопической стрелы, где находится телескопический механизм;
(2) проведение расчета по нижеследующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
(3) определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из ряда начального положения в ряд заданного положения в соответствии с определенным результатом; и
(4) вывод управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, корректировки согласованных операций между штифтовым механизмом и телескопическим цилиндром для управления последовательностью операций секций в процессе переключения из начального положения в заданное положение.
2. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.1, в котором:
на этапе (2) выполнение расчета по формуле для получения промежуточного параметра Sx осуществляют после выполнения нижеследующих этапов:
(21) установление i=n и установление нулевого значения для промежуточной переменной;
(22) определение, является ли ai равным bi; если нет, происходит выполнение этапа (23); и
(23) установление j=1 и получение рядов А1 и В1, исключая последние равные члены; и
на этапе (3) вектор перемещения получают посредством проведения расчета через нижеследующие этапы:
(31) определение, является ли Si больше 2; если да, выполняют этап (32);
(32) определение, является ли значение каждого Sx-1 меньше или равным 2; если да, происходит выполнение этапа (321) и получение Cj посредством замены члена j в А1 на Min(1,bj); в противном случае выполнение этапа (322) и получение Cj посредством замены члена j в А1 на 0;
(33) определение является ли Cj равным В1; если да, происходит выполнение этапа (34); в противном случае установление A1=Cj, ggx=j и j=j+1, а затем возвращение к этапу (2); и
(34) объединение подобных членов в рядах С1, С2, С3, …, добавление и дополнение последних неизменных членов, а затем выведение результата.
3. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.2, в котором, если определенный результат на этапе (22) является положительным, то выполняют этап (24), а затем возвращаются к этапу (22),
этап (24): установление i=i-1.
4. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.3, в котором, если определенный результат на этапе (31) является отрицательным, то выполняют нижеследующие этапы:
(40) установление j=1;
(41) определение, является ли ggx равным 0; если да, происходит выполнение этапа (42); в противном случае установление n_code=ggx,, а затем выполнение этапа (42);
(42) определение, является ли n_code меньше i; если да, происходит выполнение этапа (43); в противном случае происходит выполнение этапа (45);
(43) получение Dj посредством замены члена n_code в А1 на bn_code и проведения расчета по нижеследующей формуле для получения промежуточного параметра Sx:
(44) определение, является ли каждое Sx меньше или равным 2; если нет, происходит выполнение этапа (45);
(45) получение Dj посредством замены члена i в А1 на bi, установление ggx=i;
(46) определение, является ли Dj равным В1; если да, выполнение этапа (47);
(47) объединение подобных членов в рядах С1, С2, С3, …, D1, D2, D3, …, добавление и дополнение последних неизменных членов, а затем выведение результата.
5. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.4, в котором, если определенный результат на этапе (44) является положительным, то выполняют этап (51):
(51) получение Dj посредством замены члена n_code в А1 на bn_code, установление ggx=n_code и N=True (истинно), а затем выполнение этапа (46).
6. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.5, в котором, если определенный результат на этапе (46) является отрицательным, то выполняются нижеследующие этапы:
(61) определение, является ли N True; если да, выполняется установление N=False (ложно), а затем выполнение этапа (62); в противном случае установление i=i-1, а затем выполнение этапа (62);
(62) установление A1=Dj и j=j+1, получение Dj посредством замены члена i в А1 на bi, установление ggx=i, а затем выполнение этапа (46).
7. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.4 или 5, в котором этап (25) выполняют после этапа (23):
(25) определение является ли только аi неравным 0 в А1, если да, выполняют этап (40); в противном случае продолжают выполнение этапа (2); и
установление для x минимального значения 2 на этапе (43).
8. Способ оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы по п.7, в котором этап (323) выполняют после этапа (321):
(323) расчет Si из Cj и В1, определение, является ли Si больше 2; если да, происходит выполнение этапа (322); в противном случае выполнение этапа (33).
9. Система оптимизированного управления выдвижением/втягиванием одноцилиндровой штифтовой телескопической стрелы, содержащая:
устройство ввода, выполненное с возможностью получения ряда начального положения A[a1,а2,а3,…aj,…,an] и ряда заданного положения B[b1,b2,b3,…,bj,…,bn] телескопической стрелы, где n - количество секций телескопической стрелы, j - целое число, удовлетворяющее 1≤j≤n и означает любую секцию телескопической стрелы; aj и bj являются целыми числами в диапазоне 0~3 соответственно и означают, что секция зафиксирована через опорный штифт с одним из четырех отверстий для штифта в предыдущей секции соответственно; получение n_code - значения секции телескопической стрелы, где находится телескопический механизм;
контроллер, выполненный с возможностью проведения расчета по нижеследующей формуле для получения промежуточного параметра Sx и установления ограничивающих условий для хода телескопического цилиндра в соответствии с промежуточным параметром и физической зависимостью:
определение соответствия ограничивающих условий и корректировка вектора перемещения для каждого перехода из ряда начального положения в ряд заданного положения в соответствии с определенным результатом; и
устройство вывода, выполненное с возможностью вывода управляющего сигнала на штифтовой механизм и телескопический цилиндр в соответствии с вектором перемещения, корректировки согласованных операций между штифтовым механизмом и телескопическим цилиндром для управления последовательностью операций секций в процессе переключения из начального положения в заданное положение.
| CN 201154878 Y, 26.11.2008 | |||
| CN 101284636 A, 15.10.2008 | |||
| JP 2004244196 A, 02.09.2004 | |||
| JP 2003095582 A, 03.04.2003 | |||
| JP 2002255482 A, 11.09.2002 | |||
| US 4688690 A, 25.08.1987. |

