ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Приоритет настоящей заявки заявляется по дате подачи китайской патентной заявки №202110843305.9, поданной 26 июля 2021 г., содержание которой включено в настоящий документ посредством ссылки.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области техники управления инженерным оборудованием, в частности к способу мониторинга неисправностей с двухуровневым резервированием, способу раннего предупреждения о неисправностях с двухуровневым резервированием, системе раннего предупреждения о неисправностях с двухуровневым резервированием, электронному устройству, инженерному оборудованию и машиночитаемому носителю информации.
УРОВЕНЬ ТЕХНИКИ
В настоящее время, чтобы повысить эффективность использования противовеса, улучшить грузоподъемность и снизить затраты на транспортировку и установку противовеса гусеничных кранов и других кранов с отличной грузоподъемностью в процессе подъема, применяют преобразование традиционного неподвижного противовеса в подвижный противовес с регулируемым ходом вперед-назад. По сравнению с неподвижным противовесом подвижный противовес может увеличивать грузоподъемность крана при меньшем эквивалентном противовесе. При подъемных операциях обычно требуется, чтобы подвижный противовес для использования можно было подвешивать, в то же время существует необходимость в том, чтобы система управления краном могла гибко регулировать положение противовеса во времени или, желательно, в режиме реального времени на основе изменений веса или момента нагрузки во время процесса подъема, для соответствия правильному ходу противовеса, чтобы поддерживать центр тяжести крана в центральной точке поворотной опоры, для обеспечения уравновешивающего момента для поддержания устойчивости подъемной системы.
Безопасные и согласованные операции подъема и управление движением противовеса должны основываться на точных данных датчиков крана. Тогда как обычный мониторинг безопасности обычно выполняется для фиксированного противовеса, противовес устройства обычно не изменяется во время операции подъема, а запас безопасности системы в основном не сильно меняется и остается на высоком уровне, поэтому операцию подъема можно выполнить, легко ограничиваясь безопасным диапазоном. Но что касается подвижного противовеса, в ходе операции подъема система регулирует положение противовеса в соответствии с балансом моментов, при этом движение противовеса влияет на запас безопасности системы. Если датчик неисправен или данные датчиков неточны, система выполняет операцию перемещения противовеса в соответствии с данными датчика неисправного элемента или неточными данными датчика, при этом, если теоретически необходимо выполнить выталкивание противовеса (или выталкивание наружу, возможно, относительно центра поворота) для сохранения баланса, тогда как фактически выполняется втягивание противовеса, что не только не сможет обеспечить достаточный запас безопасности при проведении грузоподъемных операций, но и усугубляет силовой дисбаланс и даже приводит к несчастному случаю с опрокидыванием. Что еще больше беспокоит, так это то, что еще до того, как система теряет свой запас безопасности или способность аварийного управления безопасностью, системе трудно идентифицировать и обнаружить данные датчиков, которые не достигают порогового значения, или неисправный датчик, который не подает сигнал тревоги о достижении порогового значения. Видно, что сложно реализовать базовую гарантию безопасности крана с подвижным противовесом, используя обычный способ мониторинга фиксированного противовеса.
Соответственно, существует необходимость внедрить многоуровневую схему мониторинга, подходящую для подвижного противовеса, чтобы определить, есть ли неисправность в датчике или есть ли неточности в данных датчиков, чтобы обеспечить безопасность подъемных операций и максимально избежать несчастных случаев при опрокидывании.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание способа мониторинга неисправностей с двухуровневым резервированием, а также способа и системы раннего предупреждения о неисправностях с двухуровневым резервированием, которые позволяют избежать сбоя управления поддержанием баланса моментов, вызванного отказом или неисправностью датчиков или данных датчиков подъемного устройства, тем самым улучшая безопасность и надежность мониторинга, точность управления и операционную устойчивость подъемного устройства.
Для достижения вышеуказанной цели вариант выполнения настоящего изобретения обеспечивает способ мониторинга неисправностей с двухуровневым резервированием, включающий:
получение данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые сгруппированы соответственно по рабочим параметрам и находятся на подъемном устройстве;
при мониторинге первого уровня, определение, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, находится ли подъемное устройство в первом ошибочном рабочем состоянии, при этом соотношение преобразования включает соотношение геометрического преобразования между рабочими параметрами, которые соответствуют соответствующему фактическому измеренному значению; и
при мониторинге второго уровня, определение, на основании того, соответствует ли фактическое измеренное значение, соответствующее моменту в данных датчиков, соотношению баланса моментов между рабочими параметрами соответствующего момента, находится ли подъемное устройство во втором ошибочном рабочем состоянии, причем подъемное устройство не находится в первом ошибочном рабочем состоянии.
В частности, подъемное устройство имеет сверхподъемный механизм, при этом на этапе получения данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и находятся на подъемном устройстве,
группы датчиков специально сгруппированы в соответствии с одними и теми же ключевыми рабочими параметрами, и
ключевые рабочие параметры включают любой из рабочего параметра, характеризующего угловую ориентацию стрелы, рабочего параметра, характеризующего ход противовеса, и рабочего параметра, характеризующего величину нагрузки.
В частности, получение, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и находятся на подъемном устройстве, данных датчиков, включающих каждый рабочий параметр, включает:
получение данных датчиков, включающих рабочий параметр, характеризующий угловую ориентацию стрелы, при этом данные датчиков включают фактические измеренные значения, связанные с углом, при этом
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с углом, включают первый угол подъема основной стрелы подъемного устройства, второй угол подъема мачты сверхподъемного механизма и угол между основной стрелой и мачтой сверхподъемного механизма.
В частности, подъемное устройство дополнительно снабжено механизмом регулировки подвижного противовеса, и получение данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и находятся на подъемном устройстве, дополнительно включает:
получение данных датчиков, включающих рабочий параметр, характеризующий ход противовеса, при этом данные датчиков включают фактические измеренные значения, относящиеся к указанному ходу, при этом
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с указанным ходом, включают третий угол подъема опорного рычага противовеса подвижного механизма регулировки противовеса и ход противовеса, измеренный в режиме реального времени для подвижного механизма регулировки противовеса.
В частности, получение данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и находятся на подъемном устройстве, дополнительно включает:
получение данных датчиков, включающих рабочий параметр, характеризующий величину нагрузки, при этом данные датчиков включают фактические измеренные значения, связанные с действующей силой, и
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с действующей силой, включают измеренное натяжение в оголовке основной стрелы, первое измеренное давление в основании основной стрелы и второе измеренное давление в нижней части задней стойки мачты сверхподъемного механизма.
В частности, определение того, находится ли подъемное устройство в первом ошибочном рабочем состоянии на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, включает:
определение преобразованного измеренного значения, полученного из фактического измеренного значения в данных датчиков посредством настроенного соотношения преобразования, и
определение того, совпадает ли преобразованное измеренное значение со вторым фактическим измеренным значением в данных датчиков, или
определение того, принадлежит ли преобразованное измеренное значение заданному диапазону значений, соответствующему второму фактическому измеренному значению, при этом
соотношение преобразования включает соотношение геометрического преобразования между рабочим параметром, соответствующим первому фактическому измеренному значению, и рабочим параметром, соответствующим второму фактическому измеренному значению;
если возвращается «ДА», определяют, что подъемное устройство не находится в первом ошибочном рабочем состоянии;
если возвращается «НЕТ», определяют, что подъемное устройство находится в первом ошибочном рабочем состоянии.
В частности, при этом настроенное соотношение преобразования включает следующее: сумма первого угла подъема, второго угла подъема и прилежащего угла представляет собой заданный угол или принадлежит заданному диапазону значений, соответствующему заданному углу.
В частности, определение того, находится ли подъемное устройство в первом ошибочном рабочем состоянии на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, включает:
считывание, из данных датчиков, фактических измеренных значений, соответствующих первому угла подъема, второму угла подъема и прилежащему углу, и
определение, в соответствии с настроенным соотношением преобразования, является ли сумма фактических измеренных значений, соответствующих первому угла подъема, второму угла подъема и прилежащему углу, заданным углом или принадлежит заданному диапазону значений, соответствующему заданному углу.
В частности, при этом указанный диапазон значений получают путем:
определения величины погрешности расположенных датчиков угла; и
настройку диапазона значений от первого значения до второго значения в качестве указанного диапазона значений, при этом
первое значение представляет собой разность между заданным углом и величиной погрешности датчика,
второе значение представляет собой сумму заданного угла и величины погрешности датчика.
В частности, при этом настроенное соотношение преобразования включает то, что абсолютное значение разницы между преобразованным ходом противовеса, полученным путем вычисления третьего угла подъема, и ходом противовеса в режиме реального времени попадает в указанный диапазон значений.
В частности, определение того, находится ли подъемное устройство в первом ошибочном рабочем состоянии на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, включает:
считывание фактических измеренных значений, соответствующих третьему углу подъема и ходу противовеса в режиме реального времени, из данных датчиков, и определение преобразованного измеренного значения преобразованного хода противовеса через фактическое измеренное значение, соответствующее третьему углу подъема; и
определение, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разницы между фактическим измеренным значением, соответствующим ходу противовеса в режиме реального времени, и преобразованным измеренным значением, заданному диапазону значений.
В частности, при этом настроенное соотношение преобразования включает то, что абсолютное значение разницы между первым весом груза и вторым весом груза попадает в заданный диапазон значений, при этом
первый вес груза получают путем преобразования измеренного натяжения с помощью первого соотношения тригонометрической функции, и
второй вес груза получают путем преобразования первого измеренного давления с помощью второго соотношения тригонометрической функции.
В частности, определение того, находится ли подъемное устройство в первом ошибочном рабочем состоянии на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, включает:
считывание фактических измеренных значений, соответствующих измеренному натяжению и первому измеренному давлению, из данных датчиков, и определение преобразованных измеренных значений, соответствующих, соответственно, первому весу груза и второму весу груза; и
определение, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разницы между преобразованными измеренными значениями, соответствующими первому весу груза и второму весу груза, указанному диапазону значений.
В частности, способ мониторинга неисправностей с двухуровневым резервированием дополнительно включает:
при мониторинге на промежуточном уровне, определение того, является ли соотношение соответствия уровня величины соотношением соответствия, соответствующем устойчивому состоянию подъемного устройства, при этом
соотношение соответствия уровня величины представляет собой соотношение соответствия между уровнем величины третьего веса груза и уровнем величины первого веса груза, или соотношение соответствия между уровнем величины третьего веса груза и уровнем величины второго веса груза, и
уровень величины третьего веса груза получают посредством второго измеренного давления, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии;
если возвращается «ДА», определяют, что подъемное устройство не находится в третьем ошибочном рабочем состоянии; и
если возвращается «НЕТ», определяют, что подъемное устройство находится в третьем ошибочном рабочем состоянии.
В частности, определение, находится ли подъемное устройство во втором ошибочном рабочем состоянии, на основании того, удовлетворяет ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, включает:
определение того, принадлежит ли абсолютное значение разности между моментом на конце груза и моментом на конце противовеса заданному диапазону значений, соответствующему состоянию баланса момента подъемного устройства, при этом
момент на конце груза получают путем вычисления фактического измеренного значения, связанного с углом, и фактического измеренного значения, связанного с действующей силой, и
момент на конце противовеса получают путем расчета фактического измеренного значения, связанного с ходом;
если возвращается «ДА», определяют, что подъемное устройство не находится во втором ошибочном рабочем состоянии; и
если возвращается «НЕТ», определяют, что подъемное устройство находится во втором ошибочном рабочем состоянии.
Один вариант выполнения настоящего изобретения обеспечивает способ раннего предупреждения о неисправностях с двухуровневым резервированием, который включает вышеупомянутый способ мониторинга неисправностей с двухуровневым резервированием и дополнительно включает:
определение того, что подъемное устройство находится в каком-либо из ошибочных рабочих состояний; и
остановку подъемного устройства от выполнения операции подъема и выполнение настроенного раннего предупреждения.
Один вариант выполнения настоящего изобретения обеспечивает систему раннего предупреждения о неисправностях с двухуровневым резервированием, содержащую:
модуль получения, выполненный с возможностью получения данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и находятся на подъемном устройстве,
модуль мониторинга первого уровня, выполненный с возможностью определения, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, находится ли подъемное устройство в первом ошибочном рабочем состоянии при мониторинге первого уровня, при этом соотношение преобразования включает соотношение геометрического преобразования между рабочими параметрами, соответствующее соответствующему фактическому измеренному значению; и
модуль мониторинга второго уровня, выполненный с возможностью определения, на основании того, удовлетворяет ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, находится ли подъемное устройство во втором ошибочном рабочем состоянии при мониторинге второго уровня, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии.
В частности, система раннего предупреждения о неисправностях с двухуровневым резервированием дополнительно содержит:
модуль раннего предупреждения, выполненный с возможностью определения того, что подъемное устройство находится в каком-либо из ошибочных рабочих состояний, и
остановку подъемного устройства от выполнения операции подъема и выполнение настроенного раннего предупреждения.
В еще одном аспекте один вариант выполнения настоящего изобретения обеспечивает электронное устройство, содержащее:
по меньшей мере один процессор; и
память, соединенную с указанным по меньшей мере одним процессором; причем в памяти хранятся инструкции, выполняемые указанным по меньшей мере одним процессором, при этом указанный по меньшей мере один процессор реализует описанный выше способ путем выполнения инструкций, хранящихся в памяти.
В еще одном аспекте один вариант выполнения настоящего изобретения обеспечивает инженерное оборудование, которое содержит вышеупомянутое электронное устройство.
В еще одном аспекте один вариант выполнения настоящего изобретения обеспечивает машиночитаемый носитель данных, хранящий компьютерные инструкции, которые при выполнении на компьютере обеспечивают выполнение компьютером вышеупомянутого способа.
В соответствии с изобретением, корреляция между модулями мониторинга различных параметров в системе управления, соответствующей датчикам, устанавливается на основании того, являются ли соответствующие фактические измеренные значения показателем характеристики геометрического отображения между соответствующими рабочими параметрами, таким образом формируется мониторинг первого уровня, который может отслеживать первое ошибочное рабочее состояние, вызванное такими условиями, как данные элемента или датчика, и при этом избегать различных сбоев управления безопасностью, вызванных аномальными данными, используемыми системой; на основании мониторинга первого уровня определяется отсутствие первого ошибочного рабочего состояния, во время мониторинга второго уровня фактическое измеренное значение используется для определения соотношения баланса моментов, что позволяет избежать невозможности найти второе ошибочное рабочее состояние с риском опрокидывания, вызванным структурной аномалией, аномальным управлением противовесом или аномальным управлением грузом во времени, реализовать средства мониторинга резервирования на уровне схемы и системные продукты с интерактивной корреляцией точек обнаружения с несколькими датчиками, а также может определять неисправности и выполнять раннее предупреждение о неисправностях своевременно и надежно, чтобы способствовать точной и эффективной операции подъема, повысить запас безопасности после выхода из строя элементов обнаружения, сетей или систем мониторинга и максимально избежать несчастных случаев с опрокидыванием.
Настоящее изобретение конкретно строит корреляцию рабочих параметров, связанных с угловой ориентацией стрелы, и фактическими измеренными значениями, а также выполняет соответствующий мониторинг датчиков угла на основной стреле и мачте сверхподъемника, чтобы реализовать идентификацию наличия неисправностей во время мониторинга угловой ориентации стрелы и эффективно осуществлять управление подъемной операцией подъемного устройства и/или движением противовеса на основании того, являются ли фактические измеренные значения, связанные с углом, показателем характеристики геометрического отображения между соответствующими рабочими параметрами, например, суммирование до определенного угла, например, 180 градусов.
В частности, настоящее изобретение строит корреляцию рабочих параметров, участвующих в ходе противовеса, и фактических измеренных значений и выполняет соответствующий мониторинг датчиков угла механизма регулировки противовеса и датчиков, выполняющих измерение смещения, чтобы реализовать идентификацию наличия неисправностей во время мониторинга движения противовеса механизма регулировки противовеса и эффективного выполнения управления работой подъема подъемного устройства и/или движением противовеса на основании того, являются ли смещение и фактические измеренные значения индикацией характеристики геометрического отображения между соответствующими рабочими параметрами, например, приблизительно равны ли смещение, преобразованное по углу, и обнаруженное смещение.
В частности, настоящее изобретение строит корреляцию рабочих параметров, связанных с величиной нагрузки (величиной момента на конце груза и/или величиной веса груза), с фактически измеренными значениями, и осуществляет соответствующий мониторинг датчика натяжения на основной стреле, стрелы рядом с концом груза и датчиком давления в основании основной стрелы, например, приблизительно ли равны величина нагрузки, преобразованная в натяжение, и величина нагрузки, преобразованная в давление, чтобы реализовать идентификацию наличия неисправностей во время мониторинга величины нагрузки на основную стрелу и эффективно осуществлять управления работой подъема подъемного устройства и/или движением противовеса. Кроме того, настоящее изобретение дополнительно реализует связанный мониторинг датчика давления в нижней части задней стойки мачты сверхподъемника и датчика натяжения и датчика давления на основной стреле, например, соответствует ли уровень давления на задней стойке уровню натяжения или давления на основной стреле, чтобы дополнительно реализовать идентификацию наличия неисправностей во время мониторинга величины нагрузки и эффективно реализовать управление операцией подъема подъемного устройства и/или движением противовеса.
В частности, настоящее изобретение строит корреляцию рабочих параметров, участвующих в балансировке момента, и фактических измеренных значений, и выполняет соответствующий мониторинг датчиков (например, датчиков натяжения, датчиков давления, датчиков угла и/или датчиков для операций измерения смещения), которые определяют параметры расчета момента, принимая во внимание центр вращения в качестве контрольной точки, например, приблизительно ли равны расчетный момент на конце груза и момент на конце противовеса, чтобы реализовать идентификацию наличия неисправностей во время мониторинга момента с учетом центра поворота в качестве мониторинга и эффективно реализовать управление подъемом подъемного устройства и/или движением противовеса.
Другие особенности и преимущества вариантов выполнения настоящего изобретения будут подробно описаны в следующем разделе «Подробное описание».
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи включены для обеспечения дальнейшего понимания вариантов выполнения изобретения и составляют часть данного описания и вместе с подробным описанием, приведенным ниже, служат для объяснения, но не ограничения вариантов выполнения изобретения.
На чертежах:
Фиг. 1 изображает схематический вид основных этапов способа одного варианта выполнения изобретения;
Фиг. 2 изображает схематическую диаграмму соответствий между иллюстративными рабочими ключевыми параметрами и датчиками, в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 3 иллюстрирует механическое схематическое изображение в разобранном виде оголовка основной стрелы иллюстративного подъемного устройства, в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 4 изображает схематический вид иллюстративной архитектуры сети мониторинга, в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 5 изображает блок-схему последовательности операций мониторинга в иллюстративной архитектуре сети мониторинга, в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 6 изображает иллюстративный схематический вид положения различных конструкций крана относительно корпуса гусеничного крана, в соответствии с одним вариантом выполнения настоящего изобретения.
Фиг. 7 изображает схематический вид монтажных положений некоторых датчиков на частично увеличенной конструкции крана, показанного на Фиг. 6, в соответствии с одним вариантом выполнения настоящего изобретения;
Фиг. 8 изображает схематический вид положений установки некоторых других датчиков на частично увеличенной конструкции крана, показанного на Фиг. 6, в соответствии с одним вариантом выполнения настоящего изобретения; и
Фиг. 9 схематически иллюстрирует положения установки некоторых других датчиков на частично увеличенной конструкции крана, показанного на Фиг. 6, в соответствии с одним вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Подробное описание вариантов выполнения изобретения ниже приведено со ссылкой на прилагаемые чертежи. Следует понимать, что описанные здесь конкретные варианты выполнения являются просто иллюстративными и поясняющими варианты выполнения настоящего изобретения и не предназначены для ограничения вариантов выполнения настоящего изобретения.
Вариант выполнения 1
Один вариант выполнения настоящего изобретения обеспечивает способ мониторинга неисправностей с двухуровневым резервированием, как показано на Фиг. 1, который может включать:
получение данных датчиков каждого рабочего параметра на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и находятся на подъемном устройстве;
при мониторинге первого уровня, определение, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, находится ли подъемное устройство в первом ошибочном рабочем состоянии, при этом соотношение преобразования включает соотношение геометрического преобразования между рабочими параметрами, которые соответствуют соответствующему фактическому измеренному значению; и
при мониторинге второго уровня, определение, на основании того, соответствует ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, находится ли подъемное устройство во втором ошибочном рабочем состоянии, причем подъемное устройство не находится в первом ошибочном рабочем состоянии.
В некоторых конкретных вариантах выполнения подъемное устройство может представлять собой кран, кран может представлять собой автокран, вездеходный кран, гусеничный кран и т.п., подъемное устройство может быть снабжено множеством датчиков, и датчики могут быть сгруппированы в соответствии с ключевыми рабочими параметрами, т.е. один и тот же ключевой рабочий параметр контролируется несколькими датчиками одновременно. Ключевые рабочие параметры могут включать рабочий параметр, характеризующий угловую ориентацию стрелы, рабочий параметр, характеризующий ход противовеса, и рабочий параметр, характеризующий величину нагрузки.
Рабочие параметры могут представлять собой параметры, измеряемые непосредственно датчиком во время операции подъема, подъемное устройство может быть снабжено системой управления, система управления может определять фактические измеренные значения рабочих параметров, измеренных датчиком, соответственно, рабочие параметры могут включать углы подъема рычага или стержня стрелы подъемного устройства, измеренное давление на стреле, измеренное натяжение и ход противовеса и т.д., а также фактические измеренные значения рабочих параметров могут быть приняты в качестве данных датчиков; соотношение геометрического преобразования между рабочими параметрами может быть определена на основе положений датчиков, расположенных на подъемном устройстве, а также конструктивных характеристик подъемного устройства и требований безопасной эксплуатации.
При операции подъема мониторинг первого уровня может быть основан на том, удовлетворяют ли соответствующие фактические измеренные значения, соответствующие рабочим параметрам, для которых существует соотношение геометрического преобразования, соотношению преобразования. Для принятия решения о том, удовлетворяет ли фактическое измеренное значение соотношению преобразования, если возвращается «ДА», т.е. соотношение преобразования удовлетворено, можно определить, что подъемное устройство находится в рабочем состоянии, в котором функция мониторинга является нормальной, т.е. не в первом ошибочном рабочем состоянии; в качестве альтернативы, если возвращается «НЕТ», т.е. соотношение преобразования не удовлетворяется, можно определить, что подъемное устройство находится в первом ошибочном рабочем состоянии, так что операция определения, реализованная путем объединения соответствующих фактических измеренных значений с соотношением преобразования рабочих параметров в данных датчиков, играет роль в мониторинге неисправностей. Дополнительно следует отметить, что в некоторых вариантах выполнения первое ошибочное рабочее состояние может быть достигнуто путем идентификации состояния мониторинга первого уровня, который может быть выполнен так, чтобы соответствовать некоторым неисправностям по умолчанию, или конкретным неисправностям, которые могут быть окончательно определены в соответствии с результатами поиска и устранения неисправностей, или же неопределенным неисправностям, которые могут быть вызваны множественными неисправностями или могут быть обозначены как неопределенные и подлежащие устранению неисправности. Первое ошибочное рабочее состояние может включать, например, ошибочное рабочее состояние датчика, аномальное рабочее состояние функции мониторинга с неточными данными датчика, аномальное состояние, вызванное резкими условиями работы, и/или аномальное состояние конструкции устройства и т.д., для облегчения определенных типов операций раннего предупреждения и устранения неисправностей.
В частности, соответствующие фактические измеренные значения могут включать первое фактическое измеренное значение и второе фактическое измеренное значение, причем каждое значение из первого фактического измеренного значения и второго фактического измеренного значения может представлять собой одно фактическое измеренное значение, первое фактическое измеренное значение и/или второе фактическое измеренное значение может представлять собой множество фактических измеренных значений, при этом существует по меньшей мере соотношение геометрического преобразования между рабочим параметром, соответствующим первому фактическому измеренному значению, и рабочим параметром, соответствующим второму фактическому измеренному значению. При этом определение на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, находится ли подъемное устройство в первом ошибочном рабочем состоянии, может, в частности, включать: определение преобразованного измеренного значения, полученного из первого фактического измеренного значения в данных датчиков посредством настроенного соотношения преобразования, и определение того, является ли преобразованное измеренное значение таким же, как второе фактическое измеренное значение в данных датчиков, или же преобразованное измеренное значение принадлежит указанному диапазону значений, соответствующему второму фактическому измеренному значению.
Следует понимать, что соотношение преобразования может также включать дополнительные преобразования сложения или вычитания первого фактического измеренного значения или второго фактического измеренного значения с обеих сторон конкретного уравнения или неравенства и подходящие преобразования с использованием других числовых значений, которые могут быть реализованы для соответствия конкретных способов определения программы и требованиям к конструкции; более того, поскольку фактические измеренные значения, измеренные датчиками, могут соответствовать векторным рабочим параметрам, если эти рабочие параметры могут быть физическими величинами, имеющими направления, такими как перемещения, действующие силы и моменты, соотношение преобразования может также включать в себя соотношение векторного преобразования и/или соотношение структурно-механического преобразования и т.д., которую можно рассматривать или обрабатывать в зависимости геометрического преобразования при некоторой фактической обработке данных; следует отметить, что соотношение преобразования не может быть переконфигурирована во время мониторинга, и выполнение вышеупомянутого определения на основе фактического измеренного значения может выполняться циклически.
В процессе мониторинга второго уровня на основе мониторинга первого уровня может быть определено, что подъемное устройство не находится в первом ошибочном рабочем состоянии, независимо от того, принадлежит ли абсолютное значение разницы между моментом на конце груза и моментом на конце противовеса заданному диапазону значений, соответствующем состоянию баланса моментов подъемного устройства, которое может быть специально определено для определения того, что подъемное устройство находится во втором ошибочном рабочем состоянии; следует дополнительно отметить, что в некоторых вариантах выполнения второе ошибочное рабочее состояние может быть достигнуто путем идентификации состояния мониторинга второго уровня, которая может отличаться от идентификации состояния мониторинга первого уровня и, аналогичным образом, также может соответствовать некоторым неисправностям по умолчанию или конкретным неисправностям, которые могут быть окончательно определены по результатам устранения неисправностей, или неопределенным неисправностям, которые могут быть вызваны множественными неисправностями или обозначены как неопределенные и подлежащие устранению неисправности. Второе ошибочное рабочее состояние может включать, например, аномальное рабочее состояние управления противовесом или управления операцией подъема, аномальное рабочее состояние нестандартной работы, аномальное рабочее состояние функции управления, аномальное рабочее состояние, вызванное внезапным изменением рабочей среды, аномальное рабочее состояние конструкции устройства и/или т.п. для облегчения определенных типов операций раннего предупреждения и устранения неисправностей.
В некоторых конкретных вариантах выполнения настоящего изобретения, как показано на Фиг. 2, варианты выполнения настоящего изобретения выполняют соответствующий мониторинг подъемного устройства для ключевых параметров мониторинга (или ключевых рабочих параметров), таких как, соответственно, угловая ориентация стрелы, ход противовеса и величина нагрузки, а в некоторых случаях может быть сформирована многоуровневая сеть мониторинга.
В первом иллюстративном варианте выполнения мониторинга первого уровня, при отслеживании угловой ориентации стрелы подъемное устройство может быть снабжено сверхподъемным механизмом, причем данные датчиков рабочего параметра в отношении угловой ориентации стрелы могут быть получены с помощью датчиков угла (датчика угла для мониторинга угла, или элемента обнаружения любого типа для измерения наклона, такой как датчик угла поворота и энкодер, который может преобразовывать угловое смещение и линейное смещение в электрический сигнал), расположенных между основанием и вершиной основной стрелы (стрелы), вершиной и основанием мачты сверхподъемника, а также основной стрелой и мачтой сверхподъемника и т.д., причем данные датчиков могут включать фактические измеренные значения, связанные с углом, а рабочие параметры угловой ориентации стрелы, соответствующие фактическим измеренным значениям, связанным с углом, могут включать первый угол θ1 подъема основной стрелы подъемного устройства, второй угол θ2 подъема мачты сверхподъемника сверхподъемного механизма, и прилежащий угол θ3 между основной стрелой и мачтой сверхподъемника.
Во-первых, может быть выполнено сравнение фактических измеренных значений первого угла подъема, полученных, соответственно, у основания и вершины основной стрелы, и также выполняют сравнение фактических измеренных значений второго угла подъема, полученных, соответственно, у вершины и основания мачты сверхподъемника, причем если результаты сравнения показывают, что разница между фактическими измеренными значениями не превышает заданный диапазон значений (который в этом случае может не превышать заданный порог угла, такой как, помимо прочего, не превышающий 1° и т.д.), среднее или любое из фактических измеренных значений первого угла подъема, полученных у основания и оголовка основной стрелы, соответственно, может быть тогда принято как фактическое измеренное значение первого угла θ1 подъема основной стрелы, а также может быть получено фактическое измеренное значение второго угла θ2 подъема мачты сверхподъемника.
Во-вторых, соотношение преобразования может заключаться в том, что сумма первого угла подъема, второго угла подъема и прилежащего угла составляет 180 градусов (°), записанная как:

В формуле (1) фактическое измеренное значение, соответствующее одному из трех рабочих параметров, может быть первым фактическим измеренным значением, а фактическое измеренное значение, соответствующее двум оставшимся рабочим параметрам, может быть вторым фактическим измеренным значением, а определение может быть может быть выполнено с использованием суммы трех рабочих параметров, или же определение может быть выполнено в качестве второго фактического измеренного значения с использованием разницы между 180 градусами и первым фактическим измеренным значением. При некоторой практической обработке данных может быть определена величина S погрешности датчика расположенных датчиков угла, причем величина S погрешности датчика может включать среднюю погрешность и средневзвешенную погрешность датчиков угла, а формула (1) может быть дополнительно записана как:

В формуле (2) величина δ погрешности также может быть инициализирована заданным значением и определена путем корректировки в сочетании с характеристиками фактического подъемного устройства, что может быть записано как:

В формуле (3) скорректированная сумма погрешности может включать сумму погрешности δ1 и сумму погрешности δ2, а абсолютные значения двух сумм погрешностей могут быть не равными.
В зависимости от способа мониторинга в это время, мониторинг угловой ориентации стрелы может формировать текущий мониторинг первого уровня (функциональный уровень сети или системы), причем сеть мониторинга первого уровня может включать двухуровневую подсеть мониторинга (или подфункциональный уровень системы). Двухуровневую подсеть мониторинга следует понимать как подсеть мониторинга, имеющую по меньшей мере два уровня, а терминология двух уровней в любом месте вариантов выполнения настоящего изобретения может представлять собой конкретное определение по меньшей мере двух уровней и может быть понята как таковая в вариантах выполнения настоящего изобретения. В сети мониторинга первого уровня подсеть мониторинга первого уровня может представлять собой подсеть мониторинга, сравнивающую, являются ли фактические измеренные значения множества датчиков для одного и того же рабочего параметра в значительной степени разными, являются ли фактические измеренные значения в соответствующих положениях датчиков, таких как угол подъема или прилежащий угол, в значительной степени разными, причем фактические измеренные значения в соответствующих положениях датчика, превышающие заданный порог угла, могут рассматриваться как в значительной степени разные;
подсеть мониторинга второго уровня может определять, что сумма фактических измеренных значений, соответствующих первому углу θ1 подъема, второму углу θ2 подъема и прилежащему углу θ3 среди соответствующих фактических измеренных значений, принадлежит заданному диапазону значений ([180°-δ, 180°+δ] или [180°-δ1, 180°+δ2]) (т.е. удовлетворяется ли настроенное соотношение преобразования);
соотношение преобразования на этом этапе можно рассматривать как включающее геометрическое преобразование и деформацию формулы фактических измеренных значений рабочих параметров.
Если подсеть мониторинга первого уровня в сети мониторинга первого уровня не приходит к выводу путем сравнения, что разница между фактическими измеренными значениями превышает заданный порог угла, то можно временно считать, что каждое фактическое измеренное значение доступно и является точным, затем подсеть мониторинга второго уровня в сети мониторинга первого уровня возвращает результат принадлежности к указанному диапазону значений (т.е. настроенное соотношение преобразования удовлетворено и возвращается «ДА») на основе определения, тогда можно считать, что данные датчиков не являются аномальными, а функция мониторинга подъемного устройства является нормальной, и определяют, что подъемное устройство не находится в первом ошибочном рабочем состоянии; если же подсеть мониторинга первого уровня не приходит к выводу путем сравнения, что разница между фактическими измеренными значениями превышает заданный порог угла, то фактические измеренные значения могут временно считаться доступными и точными. Затем подсеть мониторинга второго уровня возвращает результат выхода за пределы указанного диапазона значений (т.е. настроенное соотношение преобразования не удовлетворено и возвращается «НЕТ») на основе определения, тогда можно считать, что в данных имеются ошибки из-за неисправности датчика или конструкции устройства, и необходимо остановить операцию подъема и провести диагностику для определения того, что подъемное устройство находится в первом ошибочном рабочем состоянии; если подсеть мониторинга первого уровня не приходит к выводу путем сравнения, что разница между фактическими измеренными значениями превышает заданный порог угла, определяют, что в устройстве имеется неисправность или что операция подъема не соответствует требованиям безопасности работы, и что подъемное устройство находится в первом ошибочном рабочем состоянии, необходимо остановить операцию подъема и выполнить поиск и устранение неисправностей. В некоторых случаях может быть дополнительно установлено, что существует аномальная функция мониторинга подъемного устройства или другая аномалия, вызванная нестандартным устройством и работой, когда второй уровень мониторинга возвращает НЕТ.
Во втором иллюстративном варианте выполнения мониторинга первого уровня, отслеживающего ход противовеса, подъемное устройство может содержать подвижный механизм регулировки противовеса, причем механизм регулировки противовеса может содержать опорный рычаг противовеса и механизм регулировки противовеса, причем в некоторых случаях противовес может быть подвешен за опорный рычаг противовеса, механизм регулировки противовеса может иметь масляный цилиндр, который может приводиться в движение системой управления для толкания противовеса, причем, если противовес толкается в горизонтальном направлении, то он может быть выдвинут наружу (отдален) или втянут (приближен) относительно подъемного устройства, при этом ход противовеса может отслеживаться в режиме реального времени с помощью датчика длины или датчика смещения, расположенного в основании противовеса на механизме регулировки противовеса, но также возможен мониторинг в режиме реального времени путем измерения хода противовеса через ход масляного цилиндра, одновременно, основание опорного рычага противовеса может быть снабжено датчиком угла, причем третий угол подъема опорного рычага противовеса (например, угол между опорным рычагом противовеса и проекцией опорного рычага противовеса в направлении перемещения противовеса) и ход противовеса, измеренный в режиме реального времени для механизма регулировки противовеса, могут быть приняты в качестве рабочих параметров хода противовеса, данные датчиков, полученные в это время, включают, соответственно, фактические измеренные значения, связанные с ходом, а также ход противовеса в режиме реального времени и третий угол подъема, соответствующие фактическим измеренным значениям, связанным с ходом, при этом ход в вариантах выполнения настоящего изобретения может рассматриваться как расстояние перемещения или смещение противовеса из положения предварительной регулировки в положение последующей регулировки, а не максимальное расстояние перемещения или смещения, все из которых можно понимать как таковые в вариантах выполнения настоящего изобретения.
Во-первых, для мониторинга хода противовеса в режиме реального времени могут использоваться датчик длины, датчик смещения (который, например, может быть установлен вблизи датчика длины) и датчик хода масляного цилиндра, а также используется множество датчиков угла для мониторинга третьего угла подъема. Сравнивается, превышают ли разности между множеством фактических измеренных значений хода противовеса в режиме реального времени заданный диапазон значений, и сравнивается, превышают ли разности между множеством фактических измеренных значений третьего угла подъема заданный диапазон значений. Если в результате сравнения различия между фактическими измеренными значениями не выходят за пределы заданного диапазона значений, в качестве значения можно использовать среднее значение фактических измеренных значений хода противовеса в режиме реального времени или любое одно из множества фактических измеренных значений может быть использовано в качестве фактического измеренного значения хода противовеса в режиме реального времени, а также фактическое измеренное значение третьего угла подъема.
Далее, ход противовеса в режиме реального времени может быть L1, а третий угол подъема может быть θ, при этом полученный преобразованный ход L2 противовеса может быть рассчитан через третий угол θ подъема, например L2=ƒ(θ), где ƒ может быть тригонометрической функцией, и можно определить, является ли ход L1 противовеса в режиме реального времени и преобразованный ход L2 противовеса приблизительно равны, т.е.

В формуле (4) ε1 - очень небольшое число, причем конкретные значения ε1 могут указываться на основе погрешностей используемых датчиков и адаптивно корректироваться по размеру в соответствии с фактическими характеристиками во время использования, причем диапазон [0,ε1] также может быть использован в качестве текущего заданного диапазона значений. В этом случае соотношение преобразования можно рассматривать как включающее как геометрическое преобразование фактических измеренных значений рабочих параметров, так и сравнение разностей между преобразованными измеренными значениями и фактическими измеренными значениями рабочих параметров.
На основе способа мониторинга в это время мониторинг хода противовеса может формировать текущую сеть мониторинга первого уровня, причем в сети мониторинга первого уровня подсеть мониторинга первого уровня может представлять собой подсеть мониторинга, которая сравнивает, являются ли слишком разными фактические измеренные значения множества датчиков для одного и того же рабочего параметра, например, превышает ли разница множества фактических измеренных значений хода противовеса в режиме реального времени указанный диапазон значений, который в данный момент может быть заданным порогом хода, и подсеть мониторинга второго уровня может определять, приблизительно ли равно преобразованное измеренное значение, соответствующее преобразованному ходу L2 противовеса, полученному после преобразования фактического измеренного значения, соответствующего третьему углу в подъема, среди соответствующих фактических измеренных значений, фактическому измеренному значению, соответствующему ходу L1 противовеса в режиме реального времени.
Если подсеть мониторинга первого уровня в сети мониторинга первого уровня не приходит к выводу путем сравнения, что разница в фактических измеренных значениях хода противовеса в режиме реального времени и третьего угла подъема превышает заданный порог хода, то можно временно считать, что фактические измеренные значения доступны и точны. Затем, если подсеть мониторинга второго уровня в сети мониторинга первого уровня возвращает результат определения, что разница между абсолютными значениями хода L1 противовеса в режиме реального времени и преобразованным ходом L2 противовеса не принадлежит указанному диапазону значений (т.е. если они не равны приблизительно и не удовлетворяют настроенному соотношению преобразования), считается, что в данных имеется ошибка из-за неисправности датчика или конструкции устройства, при этом подъемное устройство определяется как находящееся в первом ошибочном состоянии. При работе необходимо остановить подъемную операцию и выполнить поиск неисправностей. Другие ситуации могут по-прежнему относиться к мониторингу угловой ориентации стрелы для определения комбинации результатов, возвращаемых уровнями мониторинга, и соответствующей операции устройства, и не будут повторяться.
В третьем иллюстративном варианте выполнения мониторинга первого уровня, отслеживая величину нагрузки, включая величину момента нагрузки и/или величину веса груза, взяв в качестве примера вес груза, с одной стороны, датчик натяжения может быть расположен на тяговой пластине основной стрелы подъемного устройства вблизи положения вершины основной стрелы, вес груза рассчитывается на основе измеренного натяжения датчика натяжения, с другой стороны, датчик давления может быть расположен в основании основной стрелы подъемного устройства, при этом вес груза также может быть рассчитан на основании первого измеренного давления датчика давления, рабочие параметры относительно величины нагрузки могут включать измеренное натяжение и первое измеренное давление, а данные датчиков могут включать фактическое измеренное значение, связанное с действующей силой.
Во-первых, для получения фактических измеренных значений, соответственно, измеренного натяжения и первого измеренного давления можно использовать множество датчиков. При этом сравнивают множество фактических измеренных значений измеренного натяжения и сравнивают множество фактических измеренных значений первого измеренного давления. Если путем сравнения делается вывод, что различия между фактическими измеренными значениями не выходят за установленный диапазон значений, в качестве фактического может быть принято среднее значение фактических измеренных значений измеренного натяжения, или же любое одно из множества фактических измеренных значений может быть принято за измеренное значение натяжения; аналогичным образом также может быть получено фактическое измеренное значение первого измеренного давления.
Во-вторых, исходя из конструктивных особенностей конкретного подъемного устройства и расположения датчиков, как на Фиг. 3, вес G груза может быть механически разложен, причем двумя компонентами силы являются, соответственно, измеренное натяжение Gla и первое измеренное давление Gya, а угол α преобразования рассчитывается на основе угла подъема основной стрелы (например, первого угла θ1 подъема, как описано выше), а угол β преобразования может быть рассчитан на основе длины основной стрелы, длины мачты сверхподъемника и прилежащего угла между основной стрелой и мачтой сверхподъемника (например, прилежащего угла θ3, описанного выше) в сочетании с законом косинуса или подходящей тригонометрической функцией, которую можно записать как:


В формулах (5) и (6) двумя параметрами преобразования веса G груза являются первый вес G|x=la груза и второй вес G|x=ya груза, а соотношение тригонометрической функции или используемый коэффициент преобразования силы не являются ограничивающей реализацией и могут быть реализованы адаптивно, на основе режима механического разложения, положения размещения датчика и т.д. и может быть записано как:

В формуле (7) G|х=х0 может представлять собой параметр преобразования веса G груза, соответствующий компоненту веса Gx0 груза, а Trx0 представляет собой коэффициент преобразования силы или соотношение тригонометрической функции компонента веса Gx0 груза; на основе фактических измеренных значений измеренного натяжения и первого измеренного давления в сочетании с вычисленными углами α и β определяются преобразованные измеренные значения, соответственно, первого веса G|x=la груза и второго веса G|x=ya груза, причем затем можно судить, принадлежат ли преобразованные измеренные значения первого веса G|x=la груза и второго веса G|х=уа груза заданному диапазону значений ε2 (т.е. равны ли приблизительно первый вес груза и второй вес груза), что можно записать как:

В формуле (8) ε2 - это очень небольшое число, причем конкретные значения ε2 могут задаваться на основе погрешностей используемых датчиков и адаптивно корректироваться по размеру в соответствии с фактическими характеристиками во время использования, при этом [0,ε2] также может использоваться в качестве текущего заданного диапазона значений. В этом случае соотношение преобразования можно рассматривать как включающую как механическое, так и геометрическое преобразование фактических измеренных значений рабочих параметров, а также сравнение разностей между преобразованными измеренными значениями одного и того же целевого рабочего параметра.
На основе способа мониторинга на данном этапе мониторинг величины нагрузки формирует текущую сеть мониторинга первого уровня, причем в сети мониторинга первого уровня:
подсеть мониторинга первого уровня может представлять собой подсеть мониторинга, которая сравнивает, являются ли фактически измеренные значения множества датчиков для одного и того же рабочего параметра в значительной степени разными, например, превышает ли разница между измеренными значениями измеренного натяжения или первого измеренного давления заданный диапазон значений, который в данном случае может быть порогом действующей силы, и
подсеть мониторинга второго уровня может определить, являются ли приблизительно равными преобразованные измеренные значения, полученные после преобразования фактических измеренных значений, соответствующих измеренному натяжению и первому измеренному давлению, среди соответствующих фактических измеренных значений;
если подсеть мониторинга первого уровня в сети мониторинга первого уровня не приходит к выводу путем сравнения, что фактические измеренные значения измеренного натяжения и первого измеренного давления превышают указанный порог действующей силы, фактические измеренные значения могут временно считаться быть доступными и точными. Затем, если подсетью мониторинга второго уровня в сети мониторинга первого уровня определено,
что разница между абсолютными значениями первого веса G|x=la груза и второго веса G|х=уа груза не принадлежит заданному диапазону значений (т.е. первый вес груза и второй вес груза приблизительно не равны и не удовлетворяют настроенному соотношению преобразования), считается, что в данных имеется ошибка из-за неисправности датчика или конструкции устройства, и устанавливается, что подъемное устройство находится в первом ошибочном состоянии, при этом необходимо остановить операцию подъема и выполнить поиск и устранение неисправностей. Другие ситуации могут по-прежнему относиться к мониторингу угловой ориентации стрелы для определения комбинации результатов, возвращаемых уровнями мониторинга, и соответствующей работой устройства, и не будут повторяться.
Величина нагрузки является очень важным параметром при операции подъема, выполняемой подъемным устройством. Для мониторинга величины нагрузки также можно установить датчик давления в нижней части задней стойки мачты сверхподъемника, причем второе измеренное давление может определяться датчиком давления, а на основе второго измеренного давления может быть сформирована сеть мониторинга промежуточного уровня. Сеть мониторинга промежуточного уровня может быть сетью мониторинга между сетью мониторинга первого уровня и сетью мониторинга второго уровня. Соответственно, варианты выполнения настоящего изобретения дополнительно обеспечивают трехуровневую сеть мониторинга.
В одном варианте выполнения сети мониторинга промежуточного уровня с помощью второго измеренного давления можно определить по меньшей мере три уровня величины третьего веса груза (который можно рассматривать как параметр преобразования веса G груза) на основе по меньшей мере двух контрольных значений давления, например, второе измеренное давление обозначается как Fp, а контрольные значения давления представляют собой F1 и F2(Fp≤F1,F1<Fp≤F2,F2<Fp соответствуют уровням величины (малому, среднему и большому), соответственно, третьего груза), текущий уровень величины веса третьего груза может быть определен на основе фактического измеренного значения второго измеренного давления, вес G груза может рассматриваться (возможно, после того, как соответствующие преобразованные измеренные значения веса G груза будут определены как приблизительно равные) как любое из первого веса G|x=la груза и второго веса G|x=ya груза или текущего уровня величины веса G груза, такой как большой, средний и малый, может быть определен на основе по меньшей мере двух контрольных значений веса, таких как контрольные значения веса G1 и G2(G≤G1,G1<G≤G2,G2<G соответствуют уровням, соответственно, малого, среднего и большого), затем определяют соотношение соответствия уровня величины текущего уровня величины веса G груза и текущего уровня величины третьего груза и определяют, является ли соотношение соответствия уровня величины соотношением соответствия, соответствующем установившемуся состоянию подъемного устройства, при этом установившееся состояние подъемного устройства включает установившееся состояние и неустановившееся состояние, а неустановившееся состояние включает состояние наклона вперед (угловой ориентации основной стрелы рассматривается как направление вперед) и состояние наклона назад; когда текущий уровень величины веса G груза большой, подъемное устройство находится в состоянии наклона вперед, а уровень величины, которому должен соответствовать текущий уровень величины третьего веса груза, мал; когда текущий уровень величины веса G груза является средним, подъемное устройство находится в устойчивом состоянии, и уровень величины, которому должен соответствовать текущий уровень величины третьего веса груза, также является средним; когда текущий уровень величины веса G груза мал, подъемное устройство находится в состоянии наклона назад, уровень величины, которому должен соответствовать текущий уровень величины веса третьего груза, является большим. Следует отметить, что установившееся состояние грузоподъемного устройства может определяться исходя из операции перемещения применяемого противовеса и этапа операции подъема, например, если противовес подвешивается после освобождения поднимаемого тяжелого объекта или поднятый тяжелый объект является легким, в это время установившееся состояние может быть состоянием наклона назад.
В некоторых вариантах обработки данных третий вес груза обозначается как Gp, а большой, средний и малый уровни обозначаются как, соответственно, 1, 0 и -1. Уровень величины S={si} веса G груза в каждый момент i операции подъема (который может быть целым положительным числом) и уровень величины V={νi} третьего веса Gp груза в каждый момент i операции подъема можно записать как:

Является ли соотношение соответствия уровней величин, соответствующее соответствующим фактическим измеренным значениям, соотношением соответствия, соответствующем установившемуся состоянию подъемного устройства, можно судить по тому, равна ли сумма элементов вектора-столбца  нулю (0), что можно записать как:
нулю (0), что можно записать как:

Если формула (9) не выполняется, то определяют, что грузоподъемное устройство находится в ошибочном рабочем состоянии и по меньшей мере функция мониторинга параметра работы является аномальной, при этом необходимо остановить операцию подъема и выполнить поиск неисправности.
В зависимости от текущего режима мониторинга вышеупомянутая сеть мониторинга промежуточного уровня также может иметь двухуровневую подсеть мониторинга. В сети мониторинга промежуточного уровня
подсеть мониторинга первого уровня может быть подсетью мониторинга, сравнивающей, являются ли фактические измеренные значения множества датчиков для одного и того же рабочего параметра в значительной степени различными, например, являются ли различия между множеством фактических измеренных значений второго измеренного давления, получаемого множеством датчиков давления, превышает заданный диапазон значений;
подсеть мониторинга второго уровня может определять, существует ли соотношение соответствия уровня величин между уровнем величины третьего веса Gp груза, преобразованного фактическим измеренным значением, соответствующим второму измеренному давлению Fp, среди соответствующих фактических измеренных значений и уровнем величины веса G груза - это соотношение соответствия, соответствующее установившемуся состоянию подъемного устройства, которое, например, может быть достигнуто в зависимости от того, равна ли сумма элементов вектора-столбца  фактически 0.
фактически 0.
Сеть мониторинга промежуточного уровня может использоваться для вынесения решения с помощью одноуровневой сети мониторинга, когда подъемное устройство не находится в первом ошибочном рабочем состоянии, а сеть мониторинга второго уровня может использоваться для принятия последующего решения после того, как промежуточный уровень определяет, что подъемное устройство не находится в третьем ошибочном рабочем состоянии.
Если подсеть мониторинга первого уровня в сети мониторинга промежуточного уровня не приходит к выводу путем сравнения, что разница между фактическими измеренными значениями второго измеренного давления превышает заданный диапазон значений, фактические измеренные значения могут временно считаться доступными и точными. Затем, если подсеть мониторинга второго уровня в сети мониторинга промежуточного уровня может определить, что соотношение соответствия уровня величины между уровнем величины третьего веса Gp груза, преобразованного фактическим измеренным значением, соответствующим второму измеренному давлению Fp среди соответствующих фактических измеренных значений, и уровень величины веса G груза не соответствуют соотношению соответствия, соответствующему установившемуся состоянию подъемного устройства, определяется, что подъемное устройство находится в третьем ошибочном рабочем состоянии, при этом необходимо остановить операцию подъема и выполнить устранение неполадок. Как можно понять, третье ошибочное рабочее состояние может быть достигнуто путем идентификации состояния мониторинга промежуточного уровня, которая может отличаться от идентификации состояния мониторинга первого уровня и мониторинга второго уровня, причем аналогичным образом также может быть выполнен так, чтобы соответствовать некоторым неисправностям по умолчанию или конкретным неисправностям, которые могут быть окончательно определены в соответствии с результатами устранения неисправностей, или неопределенные неисправности, которые могут быть вызваны множественными неисправностями или быть обозначены как неопределенные и подлежащие устранению неисправности. Третье ошибочное рабочее состояние может включать, например, аномальное рабочее состояние грузоподъемных механизмов, аномальное рабочее состояние нестандартной работы, аномальное рабочее состояние функции управления, аномальное рабочее состояние, вызванное внезапным изменением рабочей среды, аномальное состояние конструкции устройства и/или т.п.для облегчения определенных типов операций раннего предупреждения и устранения неисправностей.
Следует дополнительно отметить, что на основе вышеописанной реализации мониторинга в некоторых вариантах выполнения сеть мониторинга первого уровня может отслеживать по меньшей мере любое из вышеупомянутых угловой ориентации стрелы, хода противовеса и величины нагрузки, кроме того, любой из элементов подсети мониторинга первого уровня в сети мониторинга первого уровня могут выбираться в соответствии с фактическими требованиями, а подсеть мониторинга второго уровня в сети мониторинга первого уровня может использоваться в качестве основной части сети мониторинга первого уровня. Подсеть мониторинга первого уровня в сети мониторинга промежуточного уровня также может быть выбрана в соответствии с фактическими требованиями, тогда как подсеть мониторинга второго уровня в сети мониторинга промежуточного уровня также может использоваться в качестве основной части сети мониторинга промежуточного уровня.
В процессе мониторинга вышеупомянутой величины нагрузки фактические измеренные значения части рабочих параметров при мониторинге угловой ориентации стрелы используются совместно, в предпочтительном варианте реализации, с вышеупомянутыми рабочими параметрами мониторинга угловой ориентации стрелы, мониторинга хода противовеса и мониторинга величины нагрузки затем могут быть связаны для соответствующего мониторинга фактических измеренных значений соответствующих рабочих параметров, в частности, фактические измеренные значения, соответствующие моментам, контролируются в сети мониторинга второго уровня путем определения баланса моментов рабочих параметров на конце груза и рабочих параметров на конце противовеса.
В иллюстративном варианте выполнения мониторинга второго уровня соответствующий мониторинг реализуется посредством расчета момента на конце груза и момента на конце противовеса, на основании центра поворотной опоры подъемного устройства, чтобы определить, удовлетворен ли баланс моментов. Момент на конце груза, Mload, можно рассчитать по формуле:

В формуле (10) m1(G,θ) представляет собой функцию расчета момента относительно величины G грузи и угловой ориентации θ стрелы (например, угла подъема и т.д.), настроенную с учетом конструктивных характеристик конкретного грузоподъемного устройства и расположения датчиков.
Аналогично, момент на конце противовеса, Mcounterweight, может быть рассчитан по формуле:

В формуле (11) m2(L) представляет собой функцию расчета момента относительно хода L противовеса, настроенную с учетом конструктивных особенностей конкретного грузоподъемного устройства и расположения датчиков. В процессе подъема оператор может проверить состояние баланса моментов подъемного устройства в соответствии с условиями на месте, и если состояние баланса моментов сбалансировано, то соотношение баланса моментов удовлетворяется:

Из формулы (12) можно определить, что при мониторинге угловой ориентации стрелы, хода противовеса и величины нагрузки существует собственное соотношение балансов моментов рабочих параметров; может быть установлен определенный диапазон погрешностей, при этом можно судить о том, являются ли фактические измеренные значения рабочих параметров в трех вышеупомянутых подсетях мониторинга ошибочными в соответствии с уравнением баланса моментов, т.е. определяют, попадает ли разница между абсолютными значениями момента нагрузки и момента противовеса в заданный диапазон значений, который можно записать как:

В формуле (13) ε3 - это очень небольшое число, причем конкретные значения ε3 могут задаваться на основе погрешностей используемых датчиков и адаптивно корректироваться по размеру в соответствии с фактическими характеристиками во время использования, а также [0, ε3] могут использоваться в качестве текущего заданного диапазона величин. Если формула (13) не выполняется, то определяют, что грузоподъемное устройство находится во втором ошибочном рабочем состоянии, имеет место дисбаланс моментов, имеется ошибка мониторинга параметров работы и необходимо провести диагностику.
На основании способа мониторинга на данном этапе мониторинг баланса моментов может образовывать сеть мониторинга второго уровня, причем сеть мониторинга второго уровня может быть выполнена для определения того, существует ли разница между абсолютными значениями преобразованного измеренного значения момента на конце груза, Mload, рассчитанного на основе фактических измеренных значений, соответствующих величине G нагрузки и угловой ориентации ω стрелы, среди соответствующих фактических измеренных значений, а преобразованное измеренное значение момента на конце противовеса, Mcounterweight, насчитанное на основе фактического измеренного значения, соответствующего ходу L противовеса, принадлежит заданному диапазону значений, причем, если указанная разность не принадлежит указанному диапазону значений (т.е. абсолютные значения приблизительно не равны), то определяют, что грузоподъемное устройство находится во втором ошибочном рабочем состоянии, кроме того, считают, что возникли ошибки в данных по причине неисправности датчика или конструкции устройства, при этом необходимо остановить подъемную операцию и провести диагностику неисправности; сеть мониторинга второго уровня, сеть мониторинга первого уровня и сеть мониторинга промежуточного уровня составляют многоуровневую сеть мониторинга (или систему мониторинга) подъемного устройства. В некоторых случаях сеть мониторинга второго уровня может также иметь двухуровневую подсеть мониторинга, и аналогичным образом подсеть мониторинга первого уровня выполнена для определения различий между фактическими измеренными значениями множества датчиков, а подсеть мониторинга второго уровня выполнена для определения того, соответствуют ли фактические измеренные значения соотношению баланса моментов.
В одной раскрытой реализации иллюстративного варианта выполнения настоящего изобретения, как показано на Фиг. 4, сеть мониторинга подъемного устройства может содержать уровень 100 сбора данных, сеть мониторинга первого уровня, состоящую из сети 200 мониторинга угловой ориентации стрелы, сети 300 мониторинга хода противовеса и сети 400 мониторинга величины нагрузки, а также сеть 500 мониторинга второго уровня и уровень 600 вывода неисправности, причем уровень 600 вывода неисправности может выводить идентификацию состояния первого ошибочного состояния и идентификацию состояния второго ошибочного состояния, уровень 100 сбора данных выполнен для получения данных датчиков различных рабочих параметров подъемного устройства, при этом соответствующие фактические измеренные значения в данных датчиков включают фактическое измеренное значение, соответствующее рабочему параметру 101 относительно угловой ориентации стрелы, фактическое измеренное значение, соответствующее рабочему параметру 102 относительно хода противовеса, и фактическое измеренное значение, соответствующее рабочему параметру 103 о величине нагрузки; сеть 200 мониторинга угловой ориентации стрелы включает подсеть 204 мониторинга первого уровня и подсеть 205 мониторинга второго уровня, подсеть 204 мониторинга первого уровня и подсеть 205 мониторинга второго уровня могут выполнять синхронизацию данных операции 201 и 202 приема, подсеть 205 мониторинга второго уровня может также асинхронно выполнять операцию 206 приема данных после того, как подсеть 204 мониторинга первого уровня выводит результат 208 определения на уровень 600 вывода неисправности, при этом каждый из результатов 207 и 208 определения может быть использован для определения того, находится ли подъемное устройство в первом ошибочном рабочем состоянии; сеть 300 мониторинга хода противовеса и сеть 400 мониторинга величины нагрузки также могут иметь аналогичные двухуровневые подсети мониторинга (подсети 301 и 302 и подсети 401 и 402), а также рабочий механизм мониторинга хода противовеса Сеть 300 и сеть 400 мониторинга величины нагрузки могут относиться к сети 200 мониторинга угловой ориентации стрелы и не будут повторяться. Сеть 500 мониторинга второго уровня может выполнять операции 203, 303 и 403 синхронного приема данных, соответствующие подсетям двухуровневого мониторинга, сеть 500 мониторинга второго уровня также может выводить возвращаемый результат 501 определения на уровень 600 вывода неисправности, при этом сеть 500 мониторинга второго уровня может принимать решение на основании того, что сеть мониторинга первого уровня определяет, что подъемное устройство не находится в первом ошибочном рабочем состоянии; уровень 600 вывода неисправности выполнен для определения того, что возвращенным результатом любого одного решения является «НЕТ» (N), и для определения того, что подъемное устройство находится в первом ошибочном рабочем состоянии или во втором ошибочном рабочем состоянии. Уровень 600 вывода неисправности также может быть выполнен для вывода возвращаемого результата в виде «ДА» (Y), т.е. подъемное устройство не находится в первом ошибочном рабочем состоянии или во втором ошибочном рабочем состоянии. В сети мониторинга подъемного устройства также может быть выполнена сеть мониторинга промежуточного уровня (не показана на Фиг. 4), причем сеть мониторинга промежуточного уровня может принимать данные от уровня 100 сбора данных и определять, находится ли подъемное устройство в третьем ошибочном рабочем состоянии после того, как сеть мониторинга первого уровня определит, что подъемное устройство не находится в первом ошибочном рабочем состоянии, и до того, как сеть мониторинга второго уровня выполнит определение. Результат определения сети мониторинга промежуточного уровня также выводится на уровень 600 вывода неисправности.
Как показано на Фиг. 5, способ мониторинга двухуровневого резервирования неисправностей может, в частности, включать:
S1) прием, с помощью сети мониторинга первого уровня, данных датчиков, переданных уровнем 100 сбора данных, что, в частности, может включать прием сетью 200 мониторинга угловой ориентации стрелы, сетью 300 мониторинга хода противовеса и сетью 400 мониторинга величины нагрузки, данных датчиков, передаваемых уровнем 100 сбора данных;
S2) определяют, с помощью сети мониторинга первого уровня, соответствуют ли данные датчиков соотношению преобразования, что может, в частности, включать определение по меньшей мере одного из: сети 200 мониторинга угловой ориентации стрелы, сети 300 мониторинга хода противовеса и сети 400 мониторинга величины нагрузки, соответствуют ли данные датчиков соотношению преобразования на основе данных датчиков, чтобы определить, находится ли подъемное устройство в первом ошибочном рабочем состоянии; и
S3) определение, с помощью сети 500 мониторинга второго уровня, соответствуют ли данные датчиков соотношению баланса моментов, чтобы определить, находится ли подъемное устройство во втором ошибочном рабочем состоянии, при этом определяют, что подъемное устройство не находится в первом ошибочном рабочем состоянии. Данные датчиков могут передаваться синхронно или асинхронно в двухуровневую сеть мониторинга, в некоторых случаях данные датчиков, полученные сетью мониторинга второго уровня, также могут пересылаться сетью мониторинга первого уровня.
В дополнительном варианте выполнения способ мониторинга неисправностей с двухуровневым резервированием может дополнительно включать: определение, с помощью сети мониторинга промежуточного уровня, соответствуют ли данные датчиков соотношению соответствия уровня величины, чтобы определить, находится ли подъемное устройство в третьем ошибочном рабочем состоянии после определения того, что подъемное устройство не находится в первом ошибочном рабочем состоянии.
В дополнительном варианте выполнения способ мониторинга неисправностей с двухуровневым резервированием может дополнительно включать: управление перемещением противовеса в режиме реального времени и выполнение операции подъема с использованием данных датчиков в это время после определения того, что подъемное устройство не находится во втором ошибочном рабочем состоянии и в третьем ошибочном рабочем состоянии.
Вариант выполнения настоящего изобретения дополнительно обеспечивает способ раннего предупреждения о неисправностях с двухуровневым резервированием, причем способ раннего предупреждения о неисправностях с двухуровневым резервированием включает вышеупомянутый способ мониторинга неисправностей с двухуровневым резервированием и может дополнительно включать:
S1') определение того, что подъемное устройство находится в любом из ошибочных рабочих состояний; и
S2') остановку выполнения грузоподъемным устройством операций по подъему и выполнение настроенного раннего предупреждения.
В некоторых конкретных вариантах выполнения указанное настроенное раннее предупреждение может включать выполнение подсказки и трансляцию рабочего экрана подъемного устройства, выполнение акустооптических сигналов тревоги, выполнение поиска и устранения неисправностей и т.п.
По сравнению с обычным неподвижным противовесом, подвижный противовес может увеличить грузоподъемность крана при небольшом эквивалентном противовесе, если положение противовеса гибко регулируется, чтобы гарантировать, что центр тяжести системы находится в центральной точке поворотной опоры, при этом устойчивость операции по подъему может быть улучшена. Тем не менее, подвижный противовес в большинстве случаев должен опираться на подвешенный противовес. После того, как противовес отрывается от земли, система имеет только одну точку опоры, т.е. поворотную опору, причем во время подъема и конец груза, и конец противовеса могут иметь риск опрокидывания, таким образом, необходимо подбирать подходящие ходы противовеса в режиме реального времени в соответствии с изменением нагрузки, что приводит к значительному увеличению требований к безопасности общего мониторинга и значительному увеличению сложности мониторинга безопасности. В одном варианте выполнения изобретения, после подвешивания и перемещения противовеса надежный мониторинг подъемного устройства разделяется на сеть мониторинга с двухуровневым резервированием, включающую сеть мониторинга первого уровня и сеть мониторинга второго уровня, в основном надежный и точный мониторинг трех ключевых рабочих параметров в сети мониторинга первого уровня, причем тремя ключевыми рабочими параметрами являются угловая ориентация стрелы, ход противовеса и величина нагрузки, соответственно, в режиме реального времени можно определить, существует ли первое ошибочное рабочее состояние в соответствии с преобразованными измеренными значениями или соответствующими фактическими измеренными значениями трех вышеупомянутых ключевых рабочих параметров. При отсутствии первого ошибочного рабочего состояния сеть мониторинга второго уровня может определять баланс моментов и может рассчитывать состояние баланса моментов подъемного устройства в режиме реального времени и обеспечивать точный ход противовеса (согласование противовеса или перемещение положения) в режиме реального времени, благодаря чему на основании состояния баланса моментов можно не только судить о том, находится ли рабочее состояние системы в безопасном диапазоне управления, но также обеспечивать наличие и точность управления перемещением подвешенного над землей противовеса и управления грузом. Таким образом, варианты выполнения настоящего изобретения обеспечивают надежную схему мониторинга с резервированием безопасности для подъемного устройства в отношении соотношения геометрического преобразования трех вышеупомянутых ключевых параметров и соотношения баланса момента рабочих параметров, связанных с моментом, что особенно способно повысить безопасность, и характеристики устойчивости динамического переменного хода противовеса гусеничного крана, когда противовес находится в подвешенном состоянии.
Варианты выполнения настоящего изобретения позволяют конкретно задавать ключевые параметры работы (угловую ориентацию стрелы, величину нагрузки и ход противовеса) и схему мониторинга с резервированием безопасности для нового типа крана, т.е. гусеничного крана, на котором противовес может быть подвешен, так что может быть обеспечена точность мониторинга ключевых параметров в рабочем процессе, причем этот способ может использоваться для мониторинга неисправностей, связанных с системой, так что запас безопасности работы может быть увеличен, а характеристики безопасности могут быть улучшены; при этом корреляционный анализ всех параметров мониторинга реализуется с точки зрения общего баланса моментов системы и строится сеть мониторинга всей системы крана, что обеспечивает новую схему мониторинга безопасности системы для разработки нового типа крана с висящим противовесом без опускания на землю.
Этот вариант выполнения настоящего изобретения позволяет выполнить два или три уровня мониторинга с резервированием безопасности на основе сети аппаратного мониторинга существующих датчиков подъемного устройства для ключевых параметров одной и той же операции, гарантируя, что точность мониторинга ключевых параметров при эксплуатации соответствует требованиям безопасности эксплуатации; в дополнение к мониторингу с резервированием рабочих параметров по отдельности, варианты выполнения настоящего изобретения также устанавливают корреляции между параметрами на основе баланса моментов системы и дают определение точности мониторинга на уровне системы для формирования сети мониторинга.
Схема мониторинга с многоуровневым резервированием, в соответствии с настоящим изобретением, может сравнивать различия между полученными измеренными значениями в режиме реального времени, когда различия превышают допустимый диапазон погрешностей безопасности, при этом определяется, что возникла неисправность, работа устройства приостанавливается, чтобы можно было провести анализ неисправностей системы; схема мониторинга с резервированием, выполненная в соответствии с вариантами выполнения настоящего изобретения, может использоваться отдельно в качестве независимой системы мониторинга для мониторинга трех ключевых параметров работы, соответственно, угловой ориентации стрелы, величины нагрузки и хода противовеса, для реализации множества альтернативных вариантов систем мониторинга подъемного устройства.
Вариант выполнения 2
Вариант выполнения настоящего изобретения принадлежит той же изобретательской концепции, что и Вариант выполнения 1, и обеспечивает систему раннего предупреждения с двухуровневым резервированием, которую следует понимать как имеющую по меньшей мере два уровня модулей мониторинга, причем система раннего предупреждения с двухуровневым резервированием может содержать:
модуль получения, выполненный с возможностью получения, на основе групп датчиков, которые соответственно сгруппированы в соответствии с параметрами работы и находятся на подъемном устройстве, данных датчиков каждого параметра работы;
модуль мониторинга первого уровня, выполненный с возможностью определения, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков выполненному соотношению преобразования, находится ли подъемное устройство в первом ошибочном рабочем состоянии при мониторинге первого уровня, при этом соотношение преобразования включает соотношение геометрического преобразования между рабочими параметрами, соответствующее соответствующему фактическому измеренному значению; и
модуль мониторинга второго уровня, выполненный с возможностью определения, на основании того, удовлетворяет ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, находится ли подъемное устройство во втором ошибочном рабочем состоянии при мониторинге второго уровня, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии.
Система раннего предупреждения с двухуровневым резервированием дополнительно содержит:
модуль раннего предупреждения, выполненный с возможностью определения того, что подъемное устройство находится в каком-либо из ошибочных рабочих состояний, и
остановку подъемного устройства от выполнения операции подъема и выполнение настроенного раннего предупреждения.
В частности, подъемное устройство имеет сверхподъемный механизм, а модуль получения специально выполнен для получения данных датчиков, включающих рабочий параметр, характеризующий угловую ориентацию стрелы, при этом данные датчиков включают фактические измеренные значения, связанные с углом, и
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с углом, включают первый угол подъема основной стрелы подъемного устройства, второй угол подъема мачты сверхподъемника сверхподъемного механизма и угол между основной стрелой и мачтой сверхподъемника.
В частности, подъемное устройство дополнительно имеет подвижный механизм регулировки противовеса, причем модуль получения специально выполнен для получения данных датчиков, включающих рабочий параметр, характеризующий ход противовеса, при этом данные датчиков включают фактические измеренные значения, связанные с ходом, и
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с ходом, включают третий угол подъема опорного рычага противовеса подвижного механизма регулировки противовеса и ход противовеса, измеренный в режиме реального времени для подвижного механизма регулировки противовеса.
В частности, модуль получения специально выполнен для получения данных датчиков, включающих рабочий параметр, характеризующий величину нагрузки, причем данные датчиков включают фактические измеренные значения, связанные с действующей силой, и
рабочие параметры, соответствующие фактическим измеренным значениям, связанным с действующей силой, включают измеренное натяжение в оголовке основной стрелы, первое измеренное давление в основании основной стрелы и второе измеренное давление в нижней части задней стойки мачты сверхподъемника.
В частности, модуль мониторинга первого уровня может иметь ту же функцию, что и сеть мониторинга первого уровня в Варианте выполнения 1, а модуль мониторинга второго уровня может иметь ту же функцию, что и сеть мониторинга второго уровня.
В частности, модуль мониторинга первого уровня специально выполнен для:
определения преобразованного измеренного значения, полученного из фактического измеренного значения в данных датчиков посредством настроенного соотношения преобразования, и
определения того, совпадает ли преобразованное измеренное значение со вторым фактическим измеренным значением в данных датчиков, или
определения того, принадлежит ли преобразованное измеренное значение заданному диапазону значений, соответствующему второму фактическому измеренному значению, при этом
соотношение преобразования включает соотношение геометрического преобразования между рабочим параметром, соответствующим первому фактическому измеренному значению, и рабочим параметром, соответствующим второму фактическому измеренному значению;
если возвращается «ДА», определяют, что подъемное устройство не находится в первом ошибочном рабочем состоянии;
если возвращается «НЕТ», определяют, что подъемное устройство находится в первом ошибочном рабочем состоянии.
В частности, в модуле мониторинга первого уровня настроенное соотношение преобразования включает то, что сумма первого угла подъема, второго угла подъема и прилежащего угла представляет собой заданный угол или принадлежит заданному диапазону значений, соответствующему указанному углу.
В частности, модуль мониторинга первого уровня специально выполнен для считывания фактических измеренных значений, соответствующих первому углу подъема, второму углу подъема и углу, включенному в данные датчиков;
модуль мониторинга первого уровня специально выполнен для определения, в соответствии с настроенным соотношением преобразования, является ли сумма фактических измеренных значений, соответствующих первому углу подъема, второму углу подъема и прилежащему углу, заданным углом, или принадлежит заданному диапазону значений, соответствующему указанному углу.
В частности, в модуле мониторинга первого уровня указанный диапазон значений получают путем:
определения величины погрешности расположенных датчиков угла; и
настройку диапазона значений от первого значения до второго значения в качестве указанного диапазона значений, при этом
первое значение представляет собой разность между заданным углом и величиной погрешности датчика,
второе значение представляет собой сумму заданного угла и величины погрешности датчика.
В частности, в модуле мониторинга первого уровня настроенное соотношение преобразования включает то, что абсолютное значение разности между преобразованным ходом противовеса, полученным путем вычисления третьего угла подъема, и ходом противовеса в режиме реального времени принадлежит заданному диапазону значений.
В частности, модуль мониторинга первого уровня специально выполнен для считывания фактического измеренного значения, соответствующего третьему углу подъема в данных датчиков и ходе противовеса в режиме реального времени, и определения преобразованного измеренного значения преобразованного хода противовеса с помощью фактического измеренного значения, соответствующего третьему углу подъема;
модуль мониторинга первого уровня специально выполнен для определения, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разности между фактическим измеренным значением, соответствующим ходу противовеса в режиме реального времени, и преобразованным измеренным значением заданному диапазону значений.
В частности, в модуле мониторинга первого уровня настроенное соотношение преобразования включает то, что абсолютное значение разности между первым весом груза и вторым весом груза принадлежит заданному диапазону значений, при этом
первый вес груза получают путем преобразования измеренного натяжения с помощью первого соотношения тригонометрической функции, и
второй вес груза получают путем преобразования первого измеренного давления с помощью второго соотношения тригонометрической функции.
В частности, модуль мониторинга первого уровня специально выполнен для считывания фактических измеренных значений, соответствующих измеренному натяжению и первому измеренному давлению в данных датчиков, и определения преобразованных измеренных значений, соответствующих, соответственно, первому весу груза и второму весу груза;
модуль мониторинга первого уровня специально выполнен для того, чтобы определять, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разности между преобразованными измеренными значениями, соответствующими первому весу груза и второму весу груза, заданному диапазону значений.
В частности, система раннего предупреждения с двухуровневым резервированием дополнительно содержит:
модуль мониторинга промежуточного уровня, выполненный с возможностью определения того, является ли соотношение соответствия уровня величины соотношением соответствия, соответствующим устойчивому состоянию подъемного устройства, при этом
соотношение соответствия уровня величины представляет собой соотношение соответствия между уровнем величины третьего веса груза и уровнем величины первого веса груза, или соотношение соответствия между уровнем величины третьего веса груза и уровнем величины второго веса груза, и
уровень величины третьего веса груза получают по второму измеренному давлению.
В частности, модуль мониторинга промежуточного уровня может иметь ту же функцию, что и сеть мониторинга промежуточного уровня в сети мониторинга подъемного устройства в Варианте выполнения 1.
В частности, модуль мониторинга второго уровня выполнен с возможностью определения того, принадлежит ли абсолютное значение разности между моментом на конце груза и моментом на конце противовеса заданному диапазону значений, соответствующему состоянию баланса момента подъемного устройства, при этом
момент на конце груза получают путем вычисления фактического измеренного значения, связанного с углом, и фактического измеренного значения, связанного с действующей силой, и
момент на конце противовеса рассчитывают на основании фактического измеренного значения, связанного с ходом.
В некоторых конкретных вариантах выполнения система раннего предупреждения о неисправностях с двухуровневым резервированием (или модуль получения и любой по меньшей мере один модуль мониторинга в нем) может быть реализована на основе аппаратных средств, таких как один или несколько контроллеров и/или электронных устройств с процессорами. В некоторых случаях система раннего предупреждения о неисправностях с двухуровневым резервированием может быть реализована в системе цифровых электронных схем, системе интегральных схем, программируемой вентильной матрице (FPGA), специализированной интегральной схеме (ASIC), специализированной стандартной интегральной схеме (ASSP), системе на кристалле (SoC), сложном устройстве с программируемой логикой (CPLD), компьютерном оборудовании, встроенном ПО, программном обеспечении и/или их комбинации.
Вариант выполнения 3
Вариант выполнения настоящего изобретения принадлежит той же изобретательской концепции, что и Варианты выполнения 1 и 2, и обеспечивает электронное устройство, инженерное оборудование и машиночитаемый носитель информации.
Электронное устройство предназначено для представления различных форм устройств, обладающих способностью обработки команд и вычислительной способностью, таких как компьютеры, промышленные управляющие компьютеры, серверы и т.п., а процессоры и память могут быть реализованы в форме системы на кристалле, типа чипа (SoC или MCU) или собран непосредственно на плате с интерфейсом подключения. В памяти хранятся инструкции, исполняемые по меньшей мере одним процессором, при этом указанный по меньшей мере один процессор реализует способ Варианта выполнения 1 путем выполнения инструкций, хранящихся в памяти. Электронное устройство может использоваться для формирования сети мониторинга подъемного устройства в Варианте выполнения 1. В некоторых предпочтительных вариантах выполнения электронное устройство и группа датчиков могут действовать как объектные устройства сети мониторинга.
Инженерное оборудование может иметь вышеупомянутое электронное устройство, причем инженерное оборудование может содержать подъемные устройства, включая автокраны, вездеходные краны, гусеничные краны и т.п. В иллюстративном предпочтительном раскрытом варианте выполнения настоящего изобретения, как показано на Фиг. 6, гусеничный кран содержит корпус, основную стрелу, мачту сверхподъемника, (заднюю) стойку и масляный цилиндр для регулирующего рычага для подвешивания противовеса и т.д., при этом противовес гусеничного крана может быть подвешен над землей. Гусеничный кран реализует систему раннего предупреждения о неисправностях с двухуровневым резервированием в Варианте выполнения 2 посредством электронного устройства и подлежит раннему предупреждению о неисправности многоуровневой сети мониторинга. Гусеничный кран может быть оснащен группой датчиков. Как показано на Фиг. 7, на основной стреле установлены датчик натяжения тяговой пластины основной стрелы (имеется в виду область положения тяговой пластины) и датчик угла наклона оголовка основной стрелы. Как показано на Фиг. 8, на мачте сверхподъемника в первой зоне положения оголовка мачты сверхподъемника установлен датчик А угла, а во второй зоне положения оголовка мачты сверхподъемника установлен датчик В угла. Как показано на Фиг. 9, на масляном цилиндре установлен датчик хода масляного цилиндра для преобразования хода противовеса; датчик угла установлен на опорном рычаге противовеса, при этом предпочтительная область, в которой установлен датчик угла, показана сверху на Фиг. 9; датчик давления нижней части стойки (имеется в виду внутренняя часть области нижнего положения) установлен на стойке; между основной стрелой и мачтой сверхподъемника установлен датчик угла наклона основной стрелы и мачты сверхподъемника; датчик угла наклона основания основной стрелы (относится к внутренней части области положения основания) и датчик давления основания основной стрелы установлены на основной стреле; а датчик угла основания мачты сверхподъемника установлен на мачте сверхподъемника.
Машиночитаемый носитель информации может быть энергонезависимым, может иметь компьютерную программу, которая, при исполнении процессором, реализует способ в Варианте выполнения 1 для реализации мониторинга неисправностей подъемного устройства.
Необязательные реализации вариантов выполнения настоящего изобретения были подробно описаны выше вместе с сопроводительными чертежами, однако варианты выполнения настоящего изобретения не ограничиваются конкретными деталями в приведенных выше вариантах выполнения, и в технические решения вариантов выполнения настоящего изобретения может быть внесено множество простых изменений, которые находятся в пределах объема технической идеи вариантов выполнения настоящего изобретения, которые все относятся к объему защиты вариантов выполнения настоящего изобретения.
Кроме того, следует отметить, что конкретные технические признаки, описанные в вышеприведенных конкретных вариантах реализации, могут комбинироваться любым подходящим способом без противоречий. Во избежание ненужного повторения варианты выполнения настоящего изобретения дополнительно не описываются в различных возможных комбинациях.
Специалистам в данной области техники будет понятно, что все этапы или часть этапов способа, реализующего описанные выше варианты выполнения, могут быть завершены путем указания соответствующему аппаратному обеспечению посредством программы, которая хранится на носителе данных и содержит несколько инструкций для запуска однокристального компьютера, чипа или процессора для выполнения всех этапов или части этапов способа, описанного в различных вариантах выполнения заявки. Хотя вышеупомянутая сеть мониторинга (или система мониторинга) может представлять собой сеть датчиков или другую группу устройств для измерения, записи, анализа и обработки, а сеть мониторинга или система мониторинга могут содержать множество аппаратных средств и/или программного обеспечения, имеющих измерительные, записывающие данные, обрабатывающие данные и тому подобные функции. Вышеупомянутый носитель данных может быть энергонезависимым, и носитель данных может включать различные носители, такие как USB флеш-диск, жесткий диск, постоянное запоминающее устройство (ПЗУ), флеш-память, магнитный диск или оптический диск, который может хранить программный код.
Кроме того, может быть осуществлена любая комбинация различных вариантов выполнения настоящего изобретения, при условии, что она не отходит от идеи настоящих вариантов выполнения, которую также следует рассматривать как раскрытую в настоящих вариантах выполнения.
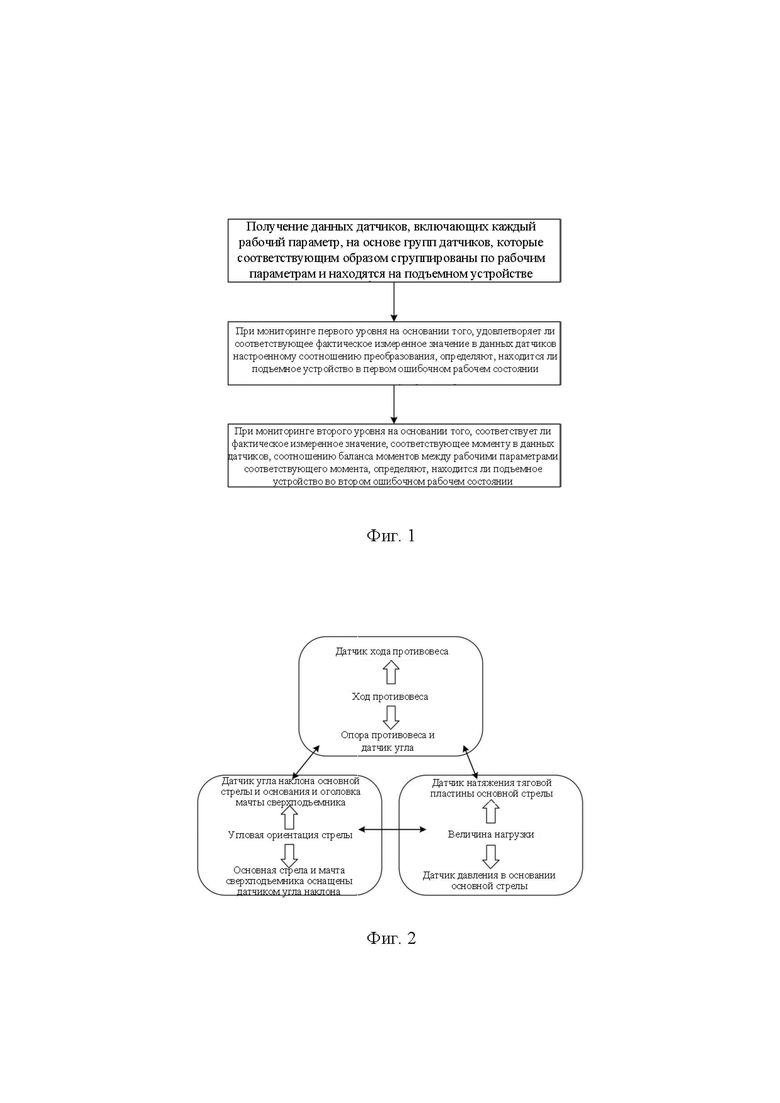
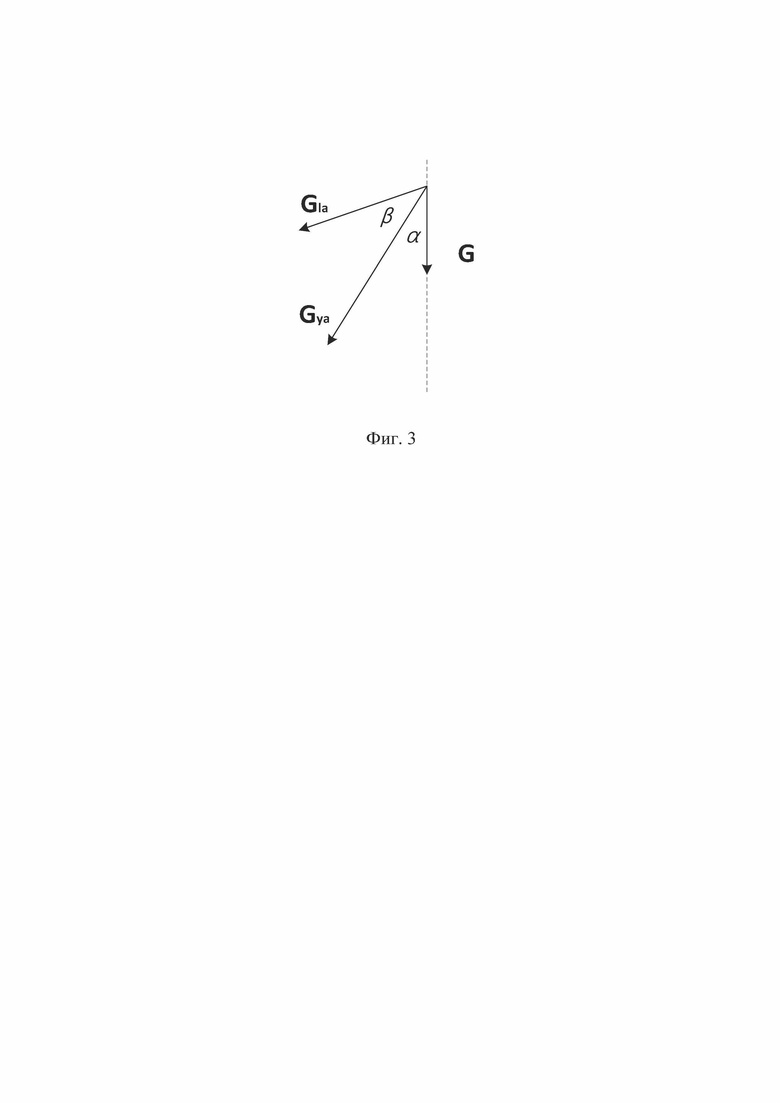
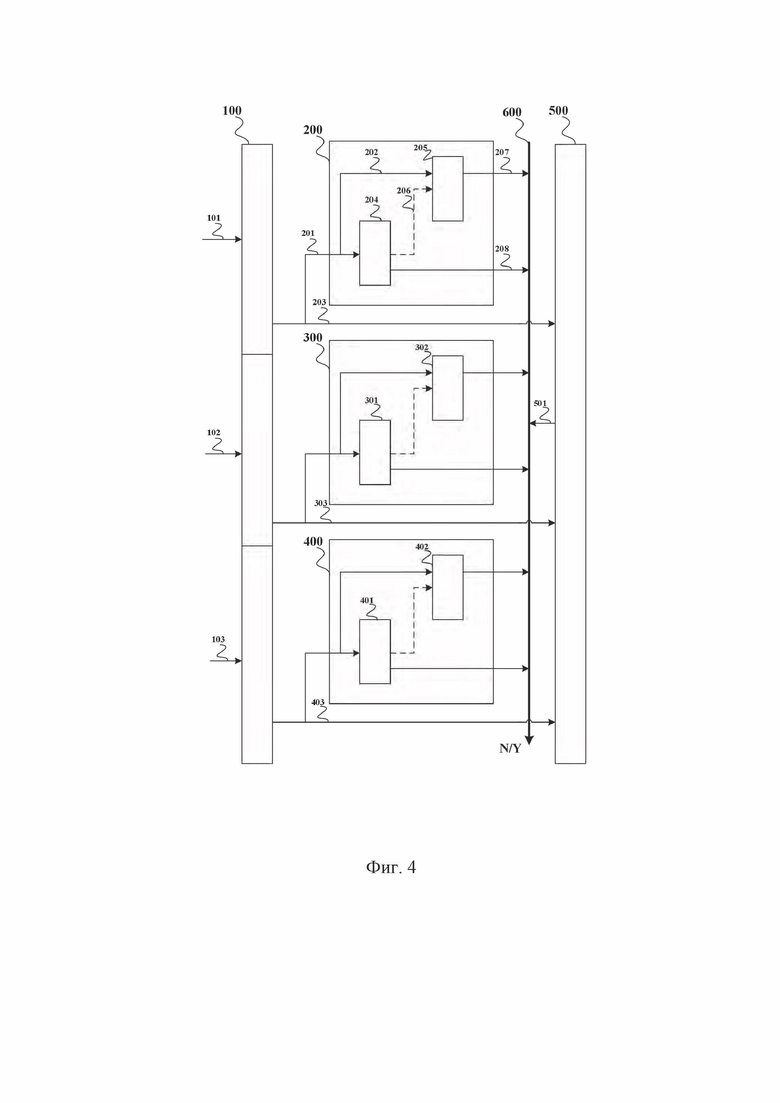
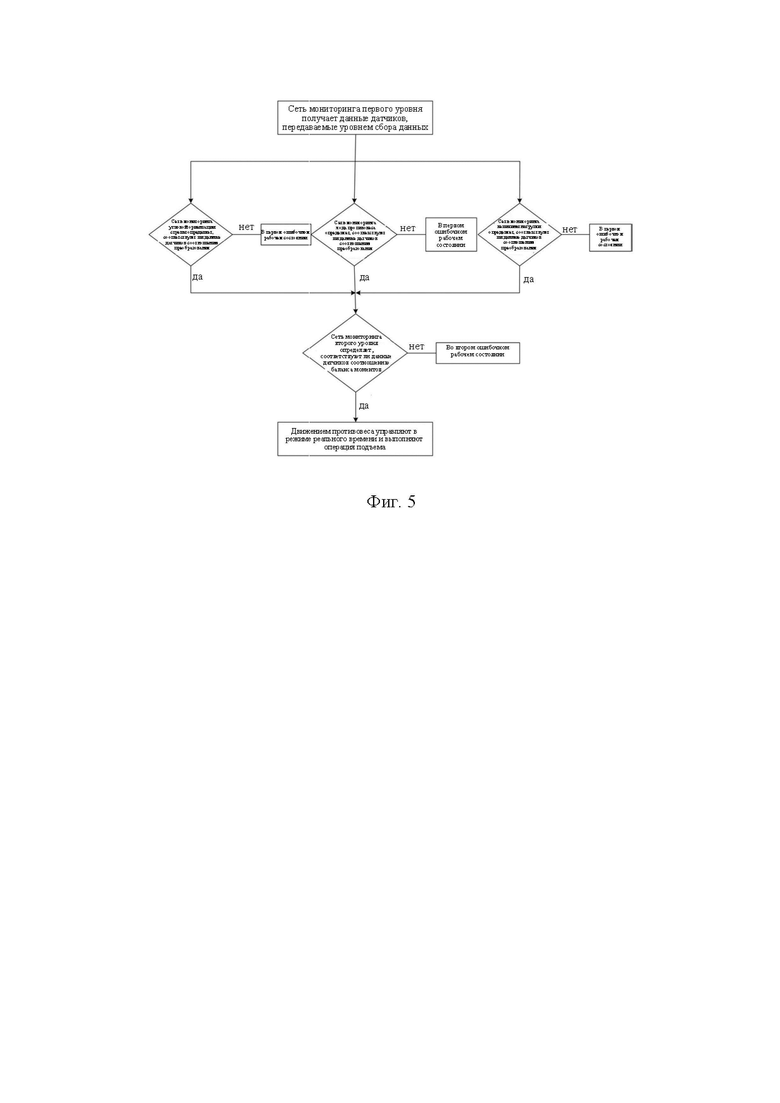
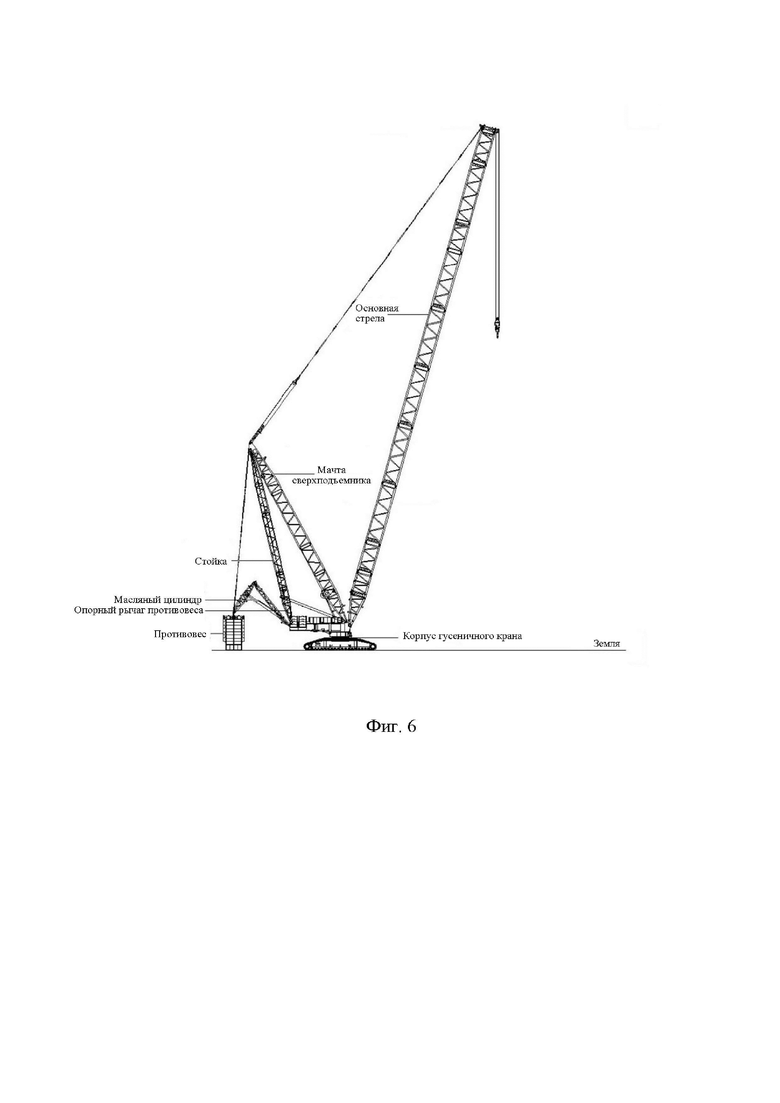
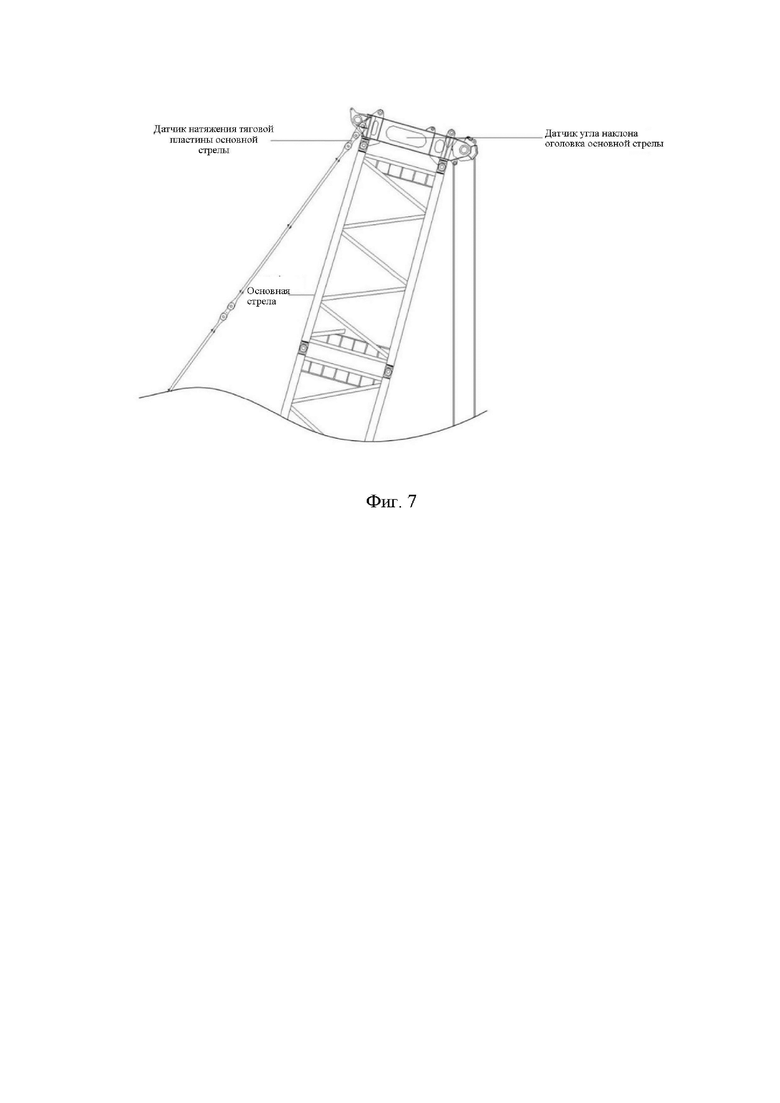

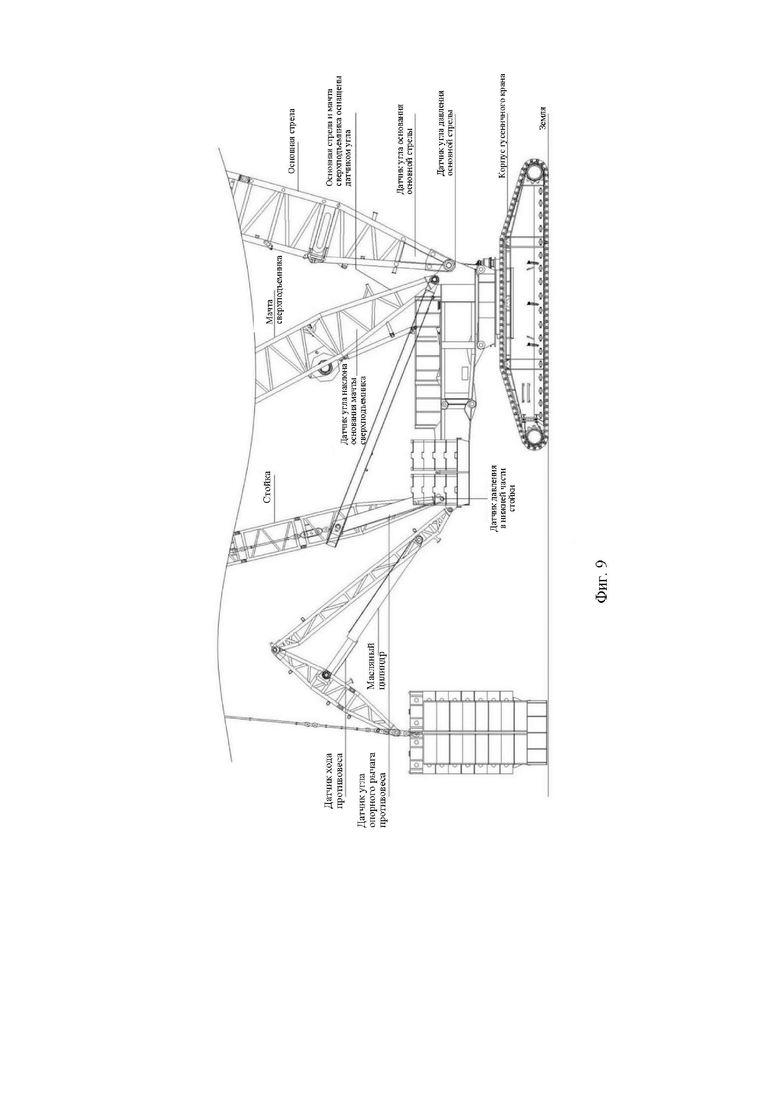
Изобретение относится к области техники управления инженерным оборудованием. Для мониторинга неисправностей с двухуровневым резервированием используют получение данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве. При мониторинге первого уровня определяют, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования. Соотношение преобразования содержит соотношение геометрического преобразования между рабочими параметрами, которые соответствуют соответствующему фактическому измеренному значению. При мониторинге второго уровня определяют, находится ли подъемное устройство во втором ошибочном рабочем состоянии, на основании того, соответствует ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии. Достигается улучшение мониторинга для избегания сбоя управления поддержанием баланса моментов, вызванного отказом или неисправностью датчиков или данных датчиков подъемного устройства, тем самым улучшая безопасность и надежность мониторинга, точность управления и операционную устойчивость подъемного устройства. 2 н. и 15 з.п. ф-лы, 9 ил.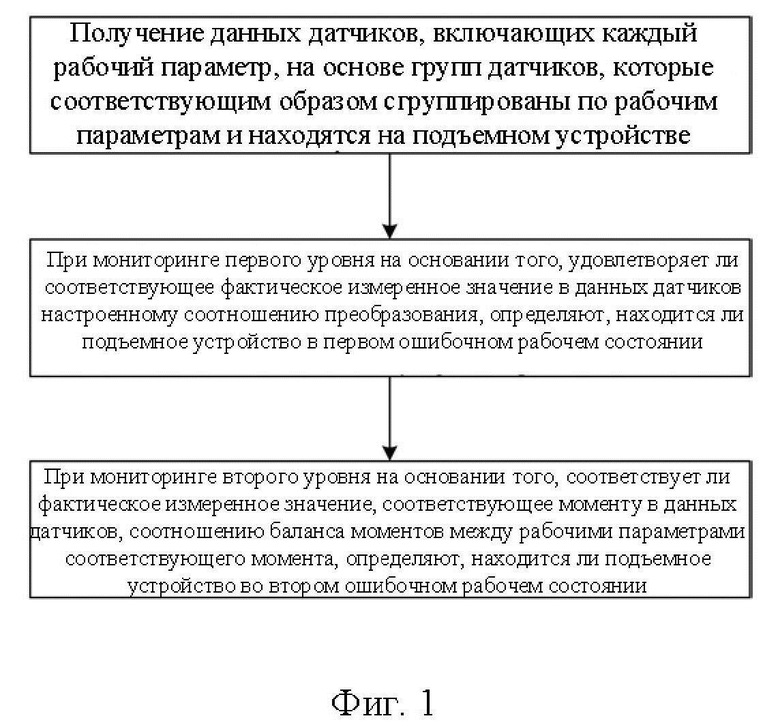
1. Способ мониторинга неисправностей с двухуровневым резервированием, отличающийся тем, что он включает:
получение данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве;
при мониторинге первого уровня, определение, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, при этом соотношение преобразования содержит соотношение геометрического преобразования между рабочими параметрами, которые соответствуют соответствующему фактическому измеренному значению; и
при мониторинге второго уровня, определение, находится ли подъемное устройство во втором ошибочном рабочем состоянии, на основании того, соответствует ли фактическое измеренное значение в данных датчиков, соответствующее моменту, соотношению баланса моментов между рабочими параметрами соответствующего момента, причем подъемное устройство не находится в первом ошибочном рабочем состоянии.
2. Способ по п. 1, отличающийся тем, что подъемное устройство имеет сверхподъемный механизм, причем на этапе получения данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве,
группы датчиков специально соответственно сгруппированы в соответствии с одними и теми же ключевыми рабочими параметрами, и
ключевые рабочие параметры включают любой рабочий параметр, характеризующий угловую ориентацию стрелы, рабочий параметр, характеризующий ход противовеса, и рабочий параметр, характеризующий величину нагрузки.
3. Способ по п. 1, отличающийся тем, что грузоподъемное устройство имеет сверхподъемный механизм, при этом при получении данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве:
получают данные датчиков, включающие рабочий параметр, характеризующий угловую ориентацию стрелы, при этом данные датчиков содержат фактическое измеренное значение, связанное с углом, причем
рабочий параметр, соответствующий фактическим измеренным значениям, связанным с углом, содержит первый угол подъема основной стрелы подъемного устройства, второй угол подъема мачты сверхподъемника сверхподъемного механизма и прилежащий угол между основной стрелой и мачтой сверхподъемника.
4. Способ по п. 3, отличающийся тем, что подъемное устройство дополнительно содержит подвижный механизм регулировки противовеса, при этом при получении данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве, дополнительно:
получают данные датчиков, включающие рабочий параметр, характеризующий ход противовеса, при этом данные датчиков содержат фактическое измеренное значение, связанное с ходом, причем
рабочий параметр, соответствующий фактическим измеренным значениям, связанным с ходом, содержит третий угол подъема опорного рычага противовеса подвижного механизма регулировки противовеса и ход противовеса, измеренный в режиме реального времени для подвижного механизма регулировки противовеса.
5. Способ по п. 4, отличающийся тем, что при получении данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы по рабочим параметрам и расположены на подъемном устройстве, дополнительно:
получают данные датчиков, включающие каждый рабочий параметр, характеризующий величину нагрузки, при этом данные датчиков содержат фактическое измеренное значение, связанное с действующей силой, причем
рабочий параметр, соответствующий фактическому измеренному значению, связанному с действующей силой, включает измеренное натяжение в оголовке основной стрелы, первое измеренное давление в основании основной стрелы и второе измеренное давление в нижней части задней стойки мачты сверхподъемника.
6. Способ по п. 1, отличающийся тем, что при определении, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования:
определяют преобразованное измеренное значение, полученное из фактического измеренного значения в данных датчиков посредством настроенного соотношения преобразования, и
определяют, совпадает ли преобразованное измеренное значение со вторым фактическим измеренным значением в данных датчиков, или
определяют, принадлежит ли преобразованное измеренное значение заданному диапазону значений, соответствующему второму фактическому измеренному значению, при этом
соотношение преобразования содержит соотношение геометрического преобразования между рабочим параметром, соответствующим первому фактическому измеренному значению, и рабочим параметром, соответствующим второму фактическому измеренному значению;
определяют, что подъемное устройство не находится в первом ошибочном рабочем состоянии, если возвращается «ДА»;
определяют, что подъемное устройство находится в первом ошибочном рабочем состоянии, если возвращается «НЕТ».
7. Способ по п. 3, отличающийся тем, что настроенное соотношение преобразования включает то, что сумма первого угла подъема, второго угла подъема и прилежащего угла представляет собой заданный угол или принадлежит заданному диапазону значений, соответствующему указанному углу.
8. Способ по п. 7, отличающийся тем, что при определении, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования:
считывают фактические измеренные значения, соответствующие первому углу подъема, второму углу подъема и прилежащему углу, в данных датчиков; и
определяют, в соответствии с настроенным соотношением преобразования, является ли сумма фактических измеренных значений, соответствующих первому углу подъема, второму углу подъема и прилежащему углу, заданным углом или принадлежит заданному диапазону значений, соответствующему заданному углу.
9. Способ по п. 8, отличающийся тем, что указанный диапазон значений получают путем:
определения величины погрешности расположенных датчиков угла; и
настройки диапазона значений от первого значения до второго значения в качестве указанного диапазона значений, при этом
первое значение представляет собой разность между указанным углом и величиной погрешности датчика, и
второе значение представляет собой сумму заданного угла и величины погрешности датчика.
10. Способ по п. 4, отличающийся тем, что настроенное соотношение преобразования включает то, что абсолютное значение разницы между преобразованным ходом противовеса, полученным путем вычисления третьего угла подъема, и ходом противовеса в режиме реального времени принадлежит заданному диапазону значений.
11. Способ по п. 10, отличающийся тем, что при определении, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования:
считывают фактические измеренные значения, соответствующие третьему углу подъема и ходу противовеса в режиме реального времени в данных датчиков, и определяют преобразованное измеренное значение преобразованного хода противовеса через фактическое измеренное значение, соответствующее третьему углу подъема; и
определяют, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разницы между фактическим измеренным значением, соответствующим ходу противовеса в режиме реального времени, и преобразованным измеренным значением заданному диапазону значений.
12. Способ по п. 5, отличающийся тем, что настроенное соотношение преобразования включает то, что абсолютное значение разницы между первым весом груза и вторым весом груза принадлежит заданному диапазону значений, при этом
первый вес груза получают путем преобразования измеренного натяжения с помощью соотношения первой тригонометрической функции, и
второй вес груза получают путем преобразования первого измеренного давления с помощью соотношения второй тригонометрической функции.
13. Способ по п. 12, отличающийся тем, что при определении, находится ли подъемное устройство в первом ошибочном рабочем состоянии, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования:
считывают фактические измеренные значения, соответствующие измеренному натяжению и первому измеренному давлению в данных датчиков, и определяют преобразованные измеренные значения, соответствующие, соответственно, первому весу груза и второму весу груза; и
определяют, в соответствии с настроенным соотношением преобразования, принадлежит ли абсолютное значение разницы между преобразованными измеренными значениями, соответствующими первому весу груза и второму весу груза, указанному диапазону значений.
14. Способ по п. 13, отличающийся тем, что дополнительно:
при мониторинге промежуточного уровня определяют, является ли соотношение соответствия уровня величины соотношением, соответствующим установившемуся состоянию подъемного устройства, при этом
соотношение соответствия уровня величины представляет собой соотношение соответствия между уровнем величины третьего веса груза и уровнем величины первого веса груза или соотношение соответствия между уровнем величины третьего веса груза и уровнем величины второго веса груза, и
уровень величины третьего веса груза получают посредством второго измеренного давления, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии;
определяют, что подъемное устройство не находится в третьем ошибочном рабочем состоянии, если возвращается «ДА»; и
определяют, что подъемное устройство находится в третьем ошибочном рабочем состоянии, если возвращается «НЕТ».
15. Способ по п. 5, отличающийся тем, что при определении, находится ли подъемное устройство во втором ошибочном рабочем состоянии, на основании того, удовлетворяет ли фактическое измеренное значение, соответствующее моменту в данных датчиков, соотношению баланса моментов между рабочими параметрами соответствующего момента:
определяют, принадлежит ли абсолютное значение разности между моментом на конце груза и моментом на конце противовеса заданному диапазону значений, соответствующему состоянию баланса момента подъемного устройства, при этом
момент на конце груза получают путем вычисления фактического измеренного значения, связанного с углом, и фактического измеренного значения, связанного с действующей силой, и
момент на конце противовеса получают путем расчета фактического измеренного значения, связанного с ходом;
определяют, что подъемное устройство не находится во втором ошибочном рабочем состоянии, если возвращается «ДА»; и
определяют, что подъемное устройство находится во втором ошибочном рабочем состоянии, если возвращается «НЕТ».
16. Система раннего предупреждения о неисправности с двухуровневым резервированием, отличающаяся тем, что она содержит:
модуль получения, выполненный с возможностью получения данных датчиков, включающих каждый рабочий параметр, на основании групп датчиков, которые соответственно сгруппированы в соответствии с рабочими параметрами и расположены на подъемном устройстве,
модуль мониторинга первого уровня, выполненный с возможностью определения, находится ли подъемное устройство в первом ошибочном рабочем состоянии при мониторинге первого уровня, на основании того, удовлетворяет ли соответствующее фактическое измеренное значение в данных датчиков настроенному соотношению преобразования, при этом соотношение преобразования включает соотношение геометрического преобразования между рабочими параметрами, соответствующее соответствующему фактическому измеренному значению, и
модуль мониторинга второго уровня, выполненный с возможностью определения, находится ли подъемное устройство во втором ошибочном рабочем состоянии при мониторинге второго уровня, на основании того, удовлетворяет ли фактическое измеренное значение, соответствующее моменту, в данных датчиков соотношению баланса моментов между рабочими параметрами соответствующего момента, при этом подъемное устройство не находится в первом ошибочном рабочем состоянии.
17. Система по п. 16, отличающаяся тем, что дополнительно содержит:
модуль раннего предупреждения, выполненный с возможностью определения того, что подъемное устройство находится в каком-либо из ошибочных рабочих состояний, и
остановку подъемного устройства от выполнения операции подъема и выполнение настроенного раннего предупреждения.
| US 2007034587 A1, 15.02.2007 | |||
| CN 102807160 A, 05.12.2012 | |||
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| ДИАГНОСТИКА НЕИСПРАВНОСТЕЙ ВО ВРЕМЯ ИСПЫТАНИЯ ТУРБИННОЙ УСТАНОВКИ | 2017 |
|
RU2694105C1 |

