Изобретение относится к реактивным управляемым снарядам, в частности к беспилотным летательным аппаратам (БПЛА) и устройствам для пуска.
Известен способ пуска БПЛА, реализуемый в самоходной пусковой установке БПЛА, полезная модель РФ, патент №85622, принятый за прототип, заключающийся в размещении БПЛА на направляющих пусковой установки под углом к горизонту и запуске его двигателя с последующим разгоном под воздействием тяги двигателя, при этом для предотвращения падения БПЛА после размещения на направляющих его крепят к пусковой установке, двигатель запускают на режим максимальной тяги и расфиксируют крепление.
Известен вариант способа пуска БПЛА «Прогресс» (П-35) комплекса «Редут» (энциклопедия XXI век, «Оружие и технологии России», том III, «Вооружение военно-морского флота», издательский дом «Оружие и технологии». М., 2001, стр.97-102), используемый при запуске БПЛА большой массы, заключающийся в размещении беспилотного летательного аппарата на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его маршевого воздушно-реактивного двигателя на режим максимальной тяги и запуске стартового реактивного двигателя твердого топлива, расфиксации крепления, последующем разгоне под воздействием суммарной тяги и отделении стартового реактивного двигателя после выгорания твердого топлива.
Все данные существенные признаки известных способов присутствуют и в вариантах предлагаемого технического решения.
Устройство по патенту №85622 принято за прототип реактивного комплекса и включает контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими, содержит двигатель и систему управления, сообщенную электрожгутом с пультом управления. Кроме того, для управляемого полета в атмосфере БПЛА снабжается управляемыми аэродинамическими поверхностями с приводами, а система управления сообщается электрожгутами с приводами аэродинамических поверхностей и двигателем.
Прототип варианта реактивного комплекса - береговой ракетный комплекс «Редут», включает контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими и содержит стартовый реактивный двигатель твердого топлива с устройством его отделения и маршевый воздушно-реактивный двигатель, аэродинамические поверхности управления полетом с приводами и систему управления, сообщенную электрожгутами с пультом управления, стартовым и маршевым двигателями и с приводами аэродинамических поверхностей.
Все данные существенные признаки вариантов известных реактивных комплексов присутствуют в вариантах предлагаемого технического решения.
Для современных БПЛА, оборудованных различной аппаратурой мониторинга земной поверхности, например радиовысотомером, измерителем скорости полета, фотоаппаратурой, тепловизором, вследствие расположения этой аппаратуры в нижней части фюзеляжа БПЛА затруднено ее обслуживание и замена при поломке. Кроме того, при снабжении БПЛА воздушно-реактивным двигателем его целесообразно располагать в нижней части фюзеляжа, чтобы на наиболее напряженном участке работы двигателя (наборе высоты БПЛА) фюзеляж не дросселировал расход воздуха в двигатель, однако при такой компоновке БПЛА необходимо увеличивать высоту крепления направляющих для размещения и обслуживания двигателя на пусковой установке, что приводит к увеличению массы и габаритов пусковой установки.
Техническим результатом, на решение которого направлено изобретение, является облегчение и ускорение работ при подготовке БПЛА к пуску и обеспечение пуска БПЛА с внешним креплением двигателя или его воздухозаборного устройства к нижней части фюзеляжа, без увеличения высоты крепления направляющих.
Для достижения названного технического результата в способе пуска беспилотного летательного аппарата по первому варианту, заключающемся в размещении беспилотного летательного аппарата на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его двигателя на режим максимальной тяги, расфиксации крепления и последующем разгоне под воздействием тяги двигателя, беспилотный летательный аппарат размещают на направляющих пусковой установки в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, а в автономном полете, управляя его аэродинамическими поверхностями, возвращают в нормальное полетное положение.
Для достижения названного технического результате в способе пуска беспилотного летательного аппарата, по второму варианту, заключающемся в размещении беспилотного летательного аппарата на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его маршевого воздушно-реактивного двигателя на режим максимальной тяги и запуске стартового реактивного двигателя твердого топлива, расфиксации крепления, последующем разгоне под воздействием суммарной тяги и отделении стартового реактивного двигателя после выгорания твердого топлива, беспилотный летательный аппарат размещают на направляющих пусковой установки в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, а в автономном полете, управляя его аэродинамическими поверхностями, возвращают в нормальное полетное положение.
Дополнительно, в обоих вариантах способа пуска беспилотного летательного аппарата, для ускорения возврата БПЛА в нормальное положение аэродинамические поверхности до разгона устанавливают в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата и управление ими осуществляют в процессе возврата беспилотного летательного аппарата в нормальное полетное положение.
Отличительными признаками обоих вариантов способа пуска беспилотного летательного аппарата являются следующие - беспилотный летательный аппарат размещают на направляющих пусковой установки в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, а в автономном полете, управляя его аэродинамическими поверхностями, возвращают в нормальное полетное положение.
Дополнительные отличительные признаки по обоим вариантам способа - аэродинамические поверхности до разгона устанавливают в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата, и управление ими осуществляют в процессе возврата беспилотного летательного аппарата в нормальное полетное положение.
Для решения поставленной задачи в первом варианте реактивного комплекса, включающего контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими и содержит двигатель, аэродинамические поверхности управления полетом с приводами и систему управления, сообщенную электрожгутами с пультом управления, двигателем и приводами аэродинамических поверхностей, двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата относительно нормального полетного положения.
Для решения поставленной задачи во втором варианте реактивного комплекса, включающего контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими и содержит стартовый реактивный двигатель твердого топлива с устройством его отделения и маршевый воздушно-реактивный двигатель, аэродинамические поверхности управления полетом с приводами и систему управления, сообщенную электрожгутами с пультом управления, стартовым и маршевым двигателями, и с приводами аэродинамических поверхностей, стартовый реактивный двигатель твердого топлива, маршевый воздушно-реактивный двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата относительно нормального полетного положения.
Дополнительно, по обоим вариантам устройства, для ускорения возврата БПЛА в нормальное полетное положение, в стартовом положении аэродинамические поверхности управления полетом установлены в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата.
Отличительными признаками устройства по первому варианту является то, что двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата, относительно нормального полетного положения.
Отличительными признаками устройства по второму варианту является то, что стартовый реактивный двигатель твердого топлива, маршевый воздушно-реактивный двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата относительно нормального полетного положения.
Дополнительные отличительные признаки по обоим вариантам устройства - в стартовом положении аэродинамические поверхности управления полетом установлены в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата.
Благодаря наличию указанных отличительных признаков в совокупности с известными, указанными в ограничительной части формулы, облегчаются и ускоряются работы по подготовке к пуску БПЛА, обеспечивается возможность пуска БПЛА с двигателем, закрепленным в нижней части фюзеляжа без увеличения массы пусковой установки, обеспечиваются минимальные затраты топлива на возврат БПЛА в нормальное полетное положение и минимальные динамические нагрузки на БПЛА при развороте.
Предложенные технические решения могут найти применение для пуска БПЛА различного назначения, используемых в министерстве обороны для доставки полезной нагрузки и разведки местности, а также в других отраслях промышленности при необходимости обследования местности для разведки очагов пожаров, или проведения поисковых операций, при подготовке спасательных операций в аварийных ситуациях.
Изобретение поясняется чертежом.
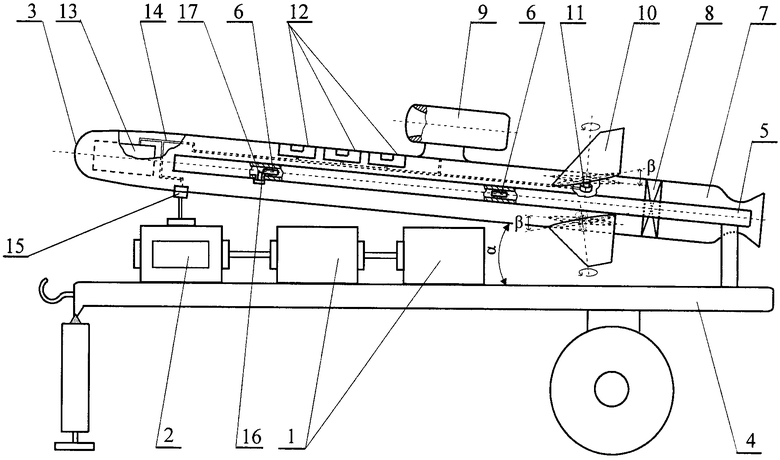
На чертеже представлен реактивный комплекс, включающий контрольно-пусковую аппаратуру 1 с пультом 2 управления, БПЛА 3 и пусковую установку 4 с направляющими 5, расположенными под углом α к горизонту по левому и правому борту БПЛА 3, при этом БПЛА 3 снабжен устройством 6 взаимодействия с направляющими 5 и содержит стартовый реактивный двигатель 7 твердого топлива с устройством 8 его отделения и маршевый воздушно-реактивный двигатель 9, аэродинамические поверхности 10 управления полетом с приводами 11, аппаратуру 12 мониторинга земной поверхности и систему 13 управления, сообщенную электрожгутами 14 с пультом 2 управления, стартовым 7 и маршевым 9 двигателями, приводами 11 аэродинамических поверхностей 10 и аппаратурой 12. Стартовый реактивный двигатель 7 твердого топлива и система 13 управления БПЛА 3 выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси БПЛА 3 относительно нормального полетного положения. В стартовом положении аэродинамические поверхности 11 управления полетом установлены в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата (отклоны на угол β). Электрожгуты 14 сообщены с пультом 2 управления через отрывной разъем 15. БПЛА 3 закреплен на пусковой установке 4 посредством устройства 16 крепления и расфиксации крепления, которое для упрощения конструкции снабжено срезной шпилькой 17.
Представленный на чертеже реактивный комплекс работает следующим образом. БПЛА 3 размещается на направляющих 5 пусковой установки 4 посредством устройства 6 в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения и закрепляется на пусковой установке 4 устройством 16 крепления и расфиксации крепления со срезной шпилькой 17. Производится соединение частей отрывного разъема 15 и благодаря связи аппаратуры 1 с пультом 2 посредством электрожгутов 14 через систему 13 управления с двигателями 7 и 9, приводами 11, аппаратурой 12 с пульта 2 посредством аппаратуры 1 осуществляется проверка всех систем БПЛА 3, а также вводятся маршрутные данные в систему 13 управления. При этом обеспечивается удобный подход к аппаратуре 12 мониторинга земной поверхности, следовательно, замена в ней отдельных блоков или расходных материалов, например сменных дисков памяти, может быть выполнена значительно быстрее, чем у прототипа. При этом маршевый воздушно-реактивный двигатель 9 на пусковой установке 1 расположен сверху, что создает удобство при контроле состояния его агрегатов, их замене, монтаже и демонтаже двигателя 9 в целом, замене масла в его системе смазки и обеспечивает пуск БПЛА 3 без увеличения высоты крепления направляющих 5, следовательно, и без увеличения массы пусковой установки 4, которая понадобилась бы при такой компоновке маршевого двигателя 9 и известном расположении БПЛА 3 на направляющих 5. Команда "пуск" выдается с пульта 2 в систему 13 управления БПЛА 3, которая обеспечивает выдачу электрического напряжения на запуск маршевого воздушно-реактивного двигателя 9 на режим максимальной тяги, после чего система 13 управления обеспечивает выдачу электрического сигнала на розжиг стартового двигателя 7, под действием суммарной тяги которого срезается шпилька 17 устройства 16 и БПЛА 3 ускоряется по направляющим 5 благодаря устройству 6. Вследствие предварительного отклонения поверхностей 10 на угол β при увеличении скорости БПЛА 3 создается момент крена, вращающий его вокруг продольной оси, а система 13 управления стабилизирует нормальное полетное положение БПЛА 3, при этом увеличение момента крена начинается с его нулевого значения и возвращение БПЛА 3 в нормальное полетное положение происходит при меньшей скорости, в более ранний момент времени, при меньшем моменте инерции вращения БПЛА 3, следовательно, стабилизация БПЛА 3 вблизи нормального полетного положения будет происходить плавно с меньшей затратой энергии на маневр (минимальным расходом топлива на преодоление дополнительного аэродинамического сопротивления от отклонения рулей 10). Пуск БПЛА 3 малой массы с одним двигателем 9 (без стартового двигателя 7) осуществляется аналогично. Отличие заключается в том, что усилие среза шпильки 17 и разгон БПЛА 3 на направляющих 5 происходит под действием максимальной тяги двигателя 9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ запуска беспилотного летательного аппарата и устройство, его реализующее | 2024 |
|
RU2839069C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДВОДНОГО КОРАБЛЯ | 2013 |
|
RU2521447C1 |
| ПОДВОДНЫЙ КОРАБЛЬ | 2013 |
|
RU2522217C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2014 |
|
RU2547964C1 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| Способ выведения беспилотного летательного аппарата на высотную траекторию полета | 2020 |
|
RU2727363C1 |
| Беспилотный летательный аппарат | 2020 |
|
RU2727770C1 |
| СПОСОБ СТАРТА ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2014 |
|
RU2547963C1 |
| ПОДВОДНЫЙ КОРАБЛЬ | 2013 |
|
RU2532279C1 |
Изобретение относится к военной технике, а именно к комплексам для запуска беспилотных летательных аппаратов (БПЛА). Реактивный комплекс содержит контрольно-пусковую аппаратуру с пультом управления, БПЛА, пусковую установку (ПУ) с направляющими и устройством крепления-расфиксации. Направляющие ПУ расположены под углом к горизонту. БПЛА содержит стартовый реактивный двигатель твердого топлива с устройством отделения, маршевый воздушно-реактивный двигатель, систему управления, соединенную электрожгутами с двигателем БПЛА, устройством взаимодействия БПЛА с направляющими ПУ, аэродинамическими поверхностями управления полетом БПЛА. БПЛА размещают на направляющих ПУ повернутым вокруг продольной оси на 180 градусов относительно нормального полетного положения. Изобретение позволяет уменьшить время предстартовой подготовки БПЛА, высоту крепления направляющих ПУ. 4 н. и 4 з.п. ф-лы, 1 ил.
1. Способ пуска беспилотного летательного аппарата, заключающийся в размещении беспилотного летательного аппарата на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его двигателя на режим максимальной тяги, расфиксации крепления и последующем разгоне под воздействием тяги двигателя, отличающийся тем, что беспилотный летательный аппарат размещают на направляющих пусковой установки в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, а в автономном полете, управляя его аэродинамическими поверхностями, возвращают в нормальное полетное положение.
2. Способ по п.1, отличающийся тем, что аэродинамические поверхности до разгона устанавливают в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата, и управление ими осуществляют в процессе возврата беспилотного летательного аппарата в нормальное полетное положение.
3. Способ пуска беспилотного летательного аппарата, заключающийся в размещении беспилотного летательного аппарата на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его маршевого воздушно-реактивного двигателя на режим максимальной тяги и запуске стартового реактивного двигателя твердого топлива, расфиксации крепления, последующем разгоне под воздействием суммарной тяги и отделении стартового реактивного двигателя после выгорания твердого топлива, отличающийся тем, что беспилотный летательный аппарат размещают на направляющих пусковой установки в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, а в автономном полете, управляя его аэродинамическими поверхностями, возвращают в нормальное полетное положение.
4. Способ по п.3, отличающийся тем, что аэродинамические поверхности до разгона устанавливают в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата, и управление ими осуществляют в процессе возврата беспилотного летательного аппарата в нормальное полетное положение.
5. Реактивный комплекс, включающий контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими и содержит двигатель, аэродинамические поверхности управления полетом с приводами и систему управления, сообщенную электрожгутами с пультом управления, двигателем и приводами аэродинамических поверхностей, отличающийся тем, что двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата, относительно нормального полетного положения.
6. Реактивный комплекс по п.5, отличающийся тем, что в стартовом положении аэродинамические поверхности управления полетом установлены в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата.
7. Реактивный комплекс, включающий контрольно-пусковую аппаратуру с пультом управления, беспилотный летательный аппарат и пусковую установку с направляющими, расположенными под углом к горизонту, и устройством крепления и расфиксации крепления беспилотного летательного аппарата, который снабжен устройством взаимодействия с направляющими и содержит стартовый реактивный двигатель твердого топлива с устройством его отделения и маршевый воздушно-реактивный двигатель, аэродинамические поверхности управления полетом с приводами и систему управления, сообщенную электрожгутами с пультом управления, стартовым и маршевым двигателями, и с приводами аэродинамических поверхностей, отличающийся тем, что стартовый реактивный двигатель твердого топлива, маршевый воздушно-реактивнй двигатель и система управления беспилотного летательного аппарата выполнены с возможностью работы на участке разгона в положении, повернутом на 180 градусов вокруг продольной оси беспилотного летательного аппарата относительно нормального полетного положения.
8. Реактивный комплекс по п.7, отличающийся тем, что в стартовом положении аэродинамические поверхности управления полетом установлены в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости беспилотного летательного аппарата.
| Сушилка для сахара-рафинада | 1949 |
|
SU85622A1 |
| WO 2011002331 A1, 06.01.2011 | |||
| US 7739938 B2, 22.06.2010 | |||
| US 6286410 B1, 11.09.2001. | |||

