Изобретение относится к авиационной технике, в частности к беспилотным летательным аппаратам (БПЛА).
Известны основные компоновочные схемы беспилотных летательных аппаратов [6] и основные тактико-технические характеристики БПЛА, несущих ударную нагрузку. К основным компоновочным схемам БПЛА относятся однороторная, мультироторная, самолетная и гибридная схемы компоновки планера БПЛА.
При однороторной схеме компоновки планера (также известная как вертолетная схема компоновки планера), БПЛА имеет один основный несущий ротор и один рулевой винт.
При мультироторной схеме компоновки планера, БПЛА имеет несколько несущих роторов, также выполняющих функции рулевых винтов. В зависимости от количества роторов компоновку планера БПЛА в данной схеме построения принято условно подразделять на трикоптеры (имеет 3 ротора), квадрокоптеры (имеет 4 ротора), гексакоптер (имеет 6 ротаров) и октокоптер (имеет 8 ротаров).
При самолтеной схеме компоновки планера БПЛА, основным принципом построения компоновочной схемы является использование жесткого крыла со специальным аэродинамическим профилем.
При гибридной схеме компоновки планера БПЛА, одновременно применяется жесткое крыло со специальным аэродинамическим профилем совместно с несколькими роторами.
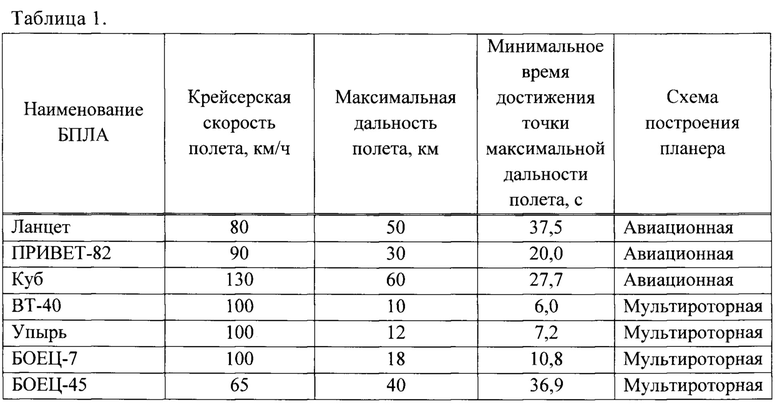
Основные тактико-технические характеристики БПЛА, несущих ударную нагрузку приведены в таблице 1.
Известен способ пуска беспилотного летательного аппарата [1], заключающийся в размещении БПЛА на направляющих пусковой установки под углом к горизонту в положении, повернутом вокруг его продольной оси на 180 градусов относительно нормального полетного положения, его креплении к пусковой установке, запуске его двигателя на режим максимальной тяги, расфиксации крепления и последующем разгоне под воздействием тяги двигателя, при этом аэродинамические поверхности БПЛА до разгона устанавливают в положение, обеспечивающее создание вращающего момента по крену при увеличении скорости БПЛА, а в автономном полете, возвращают аэродинамические поверхности БПЛА в нормальное полетное положение для управляя аэродинамическими поверхностями БПЛА.
Недостатком данного способа является то, что он не обеспечивает запуск БПЛА с мультироторной схемой компоновки планера.
Известен вариант способа пуска БПЛА «Прогресс» (П-35) комплекса «Редут» [4], используемый при запуске БПЛА большой массы, заключающийся в размещении БПЛА на направляющих пусковой установки под углом к горизонту, его креплении к пусковой установке, запуске его маршевого воздушно-реактивного двигателя на режим максимальной тяги и запуске стартового реактивного двигателя твердого топлива, расфиксации крепления, последующем разгоне под воздействием суммарной тяги и отделении стартового реактивного двигателя после выгорания твердого топлива.
Недостатком данного способа является то, что для его реализации требуется специальная пусковая установка, имеющая сложную конструкцию.
Известен способ запуска и управления полетом БПЛА с самолета-носителя [2], заключающийся в том, что:
- рабочее место оператора, аппаратуру управления полетом и целевой нагрузкой, а также БПЛА размещают внутри самолета-носителя;
- на внешних элементах конструкции самолета-носителя размещают приемопередающие антенны, обеспечивающие взаимодействие аппаратуры управления полетом и целевой нагрузкой БПЛА после запуска БПЛА в полет;
- подготовку БПЛА к запуску в полет осуществляют на борту самолета-носителя на подходе к району выполнения полетного задания БПЛА;
- запуск БПЛА в полет, а именно ввод в воздушный поток, осуществляют через открытый люк самолета-носителя;
- управление дальнейшим полетом БПЛА осуществляет оператор со своего рабочего места на самолете-носителе;
- обеспечивают наилучшие условия взаимодействия летящим БПЛА по линии «аппаратура управления - БПЛА» путем маневрирования самолета-носителя относительно БПЛА;
- осуществляют передачу управления полетом БПЛА от удаленных наземных станций управления к аппаратуре самолета-носителя и обратно.
Недостатком данного способа является ограниченность возможности его реализации при поражении самолета-носителя или выхода из строя в следствие воздействия помех бортовой аппаратуры отвечающей за подготовку БПЛА к запуску.
Наиболее близким к заявляемому способу, то есть прототипом, является способ пневматического запуска БПЛА из пусковой установки [3], заключающийся в размещении БПЛА с полностью сложенными аэродинамическими поверхностями (крыльями и винтом) в трубчатой пусковой установке, его удержанию в трубчатой пусковой установке, наполнения пусковым газом емкости под давлением, расфиксации крепления БПЛА, наполнения пусковым газом пусковой трубы из емкости под давлением, приложение усилия пускового газа для разгона БПЛА и отделения БПЛА от трубчатой пусковой установки и разворачивания аэродинамических поверхностей БПЛА в рабочее (маршевое) положение.
Недостатком данного способа является то, что, во-первых, применяемый способ загрузки БПЛА в трубчатую пусковую установку не является оперативным, во-вторых, отсутствует наведение трубчатой пусковой установки на точку телесного угла или сектор встречи с целью.
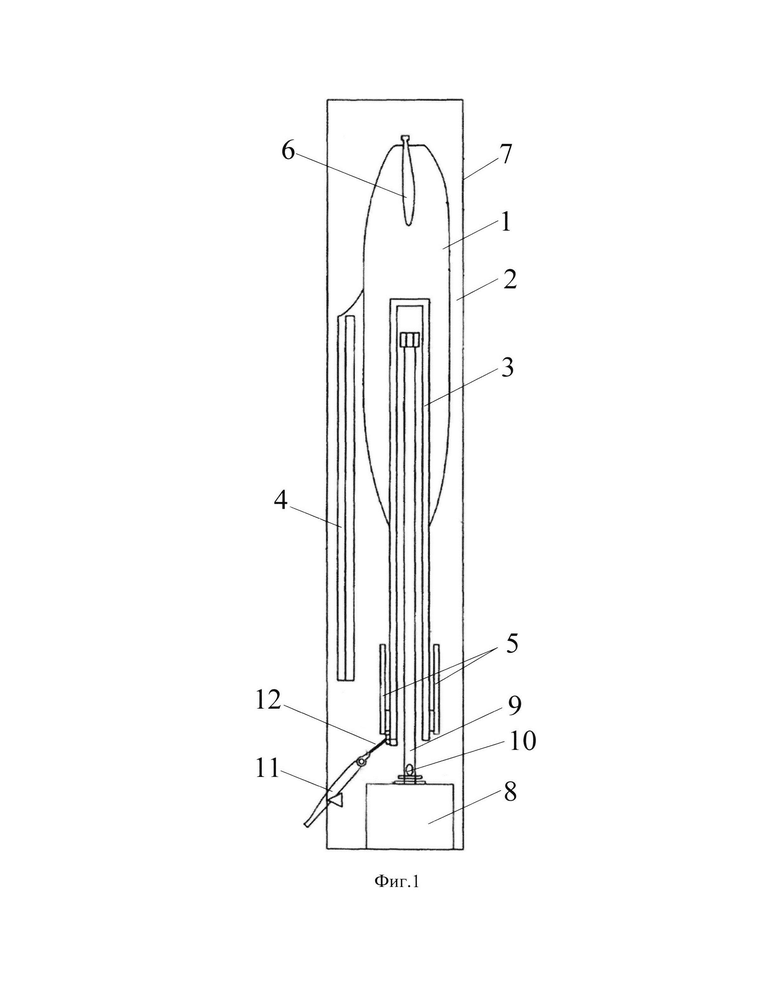
На фиг. 1 представлена схема устройства, реализующего способ прототип.
Устройство, для реализации способа прототипа, состоит из летательного аппарата (1) и пусковой установки (2). Летательный аппарат (1) имеет напорную трубу (3), которая образует часть фюзеляжа летательного аппарата (1). Летательный аппарат (1) имеет два крыла (4) сложенные, когда летательный аппарат (1) находится в пусковой установке (2), хвостовое оперение (5) и один сложенный пропеллер (6).
Напорная трубка (3) входит в пусковую установку (2) и является интерфейсом передачи энергии между пусковой установкой (2) и летательным аппаратом (1). Пусковая установка (2) имеет трубу (7), которая обеспечивает оболочку для компонентов пусковой установки и летательного аппарата (1). Также пусковая установка (2) имеет резервуар пускового газа (8), в котором хранится газ, используемый для запуска летательного аппарата (1). Пусковыми газами могут являться воздух, азот и гелий. К резервуару пускового газа (8) прикреплена пусковая труба (9), которая входит в напорную трубку (3) летательного аппарата (1). Клапан (10) позволяет оператору контролировать, момент впуска газа из резервуара пускового газа (8) в пусковую трубу (9).
Удерживающий механизм (11) используется для удержания летательного аппарата (1) в пусковой трубе (9). Для освобождения удерживающего механизма (11) предусмотрен спусковой механизм (12).
Работа по данному способу осуществляется следующим образом.
Летательный аппарат (1) помещают в пусковую установку (2). Для пуска летательного аппарата (1) воздействуют на спусковой крючок (12). При этом, удерживающий механизм (11) выпускает пусковой газ из резервуара пускового газа (8) через клапан (10) и пусковую трубу (9) в напорную трубку (3). Летательный аппарат (1) перемещается относительно пусковой трубы (9) под действием силы, действующей на напорную трубку (3) проходящего через пространство между напорной трубкой (3) и внутренней стенкой пусковой трубы (9). После выхода из пусковой установки (2) летательного аппарата (1), выполняется раскладывание двух крыльев (4) летательного аппарата (1), его хвостового оперения (5) и пропеллера (б).После развертывания их в рабочее положение, двигатель летательного аппарата (1) запускается.
Недостатком устройства является то что, во-первых для повторного запуска БПЛА требуется зарядка пусковой установки от внешнего источника давления, что может быть невозможно в особый период или военное время в ходе решения задач специализированного назначения (боевых задач), во-вторых, что запуск возможет только БПЛА, конструкция которых имеет напорную трубку, что резко ограничивает универсальность пусковой установки, в-третьих, при повреждении любого элемента пневматической системы запуск БПЛА становится невозможен.
В основу изобретения положена задача создания способа пуска БПЛА, несущих ударную нагрузку с авиационной или мультротоной схемой компоновкой планера, обеспечивающего улучшенные характеристики его применения.
Для достижения указанной цели в способ запуска беспилотного летательного аппарата дополнительно вводится ориентация трубчатой пусковой установки в азимутальной и угломестной плоскостях, ввод полетного задания в бортовую аппарату БПЛА включающего, в частности, время достижения БПЛА вершины баллистической траектории полета, установка корпусированного метательного заряда в канал трубчатой пусковой установки за БПЛА, обтюрация, разгон и вывод БПЛА из трубчатой пусковой установки под воздействием суммарной тяги газов метательного заряда, запуск маршевых двигателей БПЛА в момент времени советующий вершине баллистической траектории полета.
Предложенный способ запуска беспилотного летательного аппарата осуществляли следующим образом:
Для ориентация трубчатой пусковой установки в азимутальной и угломестной плоскостях, трубчатую пусковую установку разворачивают внутренней продольной осью канала трубчатой пусковой установки на заданный азимутальный угол в сторону полетного положения БПЛА по направлению к потенциальной цели и производят установку угла возвышения трубчатой пусковой установки. Для чего продольной оси канала трубчатой пусковой установки придают горизонтальное положение по контрольному уровню в продольном и поперечном положениях, устанавливают на прицеле нулевые установки, при которых пузырьки продольного и поперечного уровней должны быть на середине и придают по прицелу требуемый угол между горизонтом и продольной осью канала трубчатой пусковой установки.
Для достижения максимальной дальности примирения БПЛА в его управляющий блок вводится набор необходимых данных и команд для разворачивания его аэродинамических поверхностей в рабочее (маршевое) положение, запуска маршевого двигателя и выполнения задач специализированного назначения. В частности, вводится временная задержка, от момента покидания БПЛА канала трубчатой пусковой установки до момент советующего вершине баллистической траектории полета, рассчитываемая по формуле [5]:
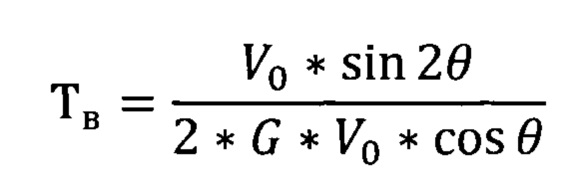
где V0 - начальная скорость броска, м/с;
 - угол возвышения трубчатой пустяковой установки (ствола) при стрельбе, градусы;
- угол возвышения трубчатой пустяковой установки (ствола) при стрельбе, градусы;
G - ускорение свободного падения (9,81 м/сек2).
В канал трубчатой пусковой установки устанавливается БПЛА, аэродинамические поверхности которого находятся в положении, обеспечивающем создание вращающего момента по крену, т.е. сложены.
Выполняется установка корпусированного метательного заряда в канал трубчатой пусковой установки за БПЛА позволяющего в дальнейшем обеспечить создание давления газов, образующихся при сгорании метательного заряда, выполненного из пороха. Установка корпусированного метательного заряда производится с казенной стороны канала трубчатой пусковой установки.
В канале трубчатой пусковой установки производится крепление корпусированного метательного заряда.
Для обеспечения вывода БПЛА из канала трубчатой пусковой установки выполняется обтюрация, в процессе которой от воспламенителя через огневую связь воспламеняется метательный заряд, выполненный из баллистического пороха марок РСИ-12К, РСИ-60, РСАМ или пироксилинового пороха марок 12/1Тр+12/7+ВТХ-10, 4/1+9/7+ВТХ-10. От давления газов на корпус метательного заряда (гильзу) и канал трубчатой пусковой установки, полученных при сгорании пороха, происходит растяжение (упругая деформация) корпуса метательного заряда и канала трубчатой пусковой установки, при которой корпус метательного заряда, плотно прижимаясь к части канала трубчатой пусковой установки (патроннику), препятствует прорыву пороховых газов в обратную сторону от БПЛА, тем самым создавая условия, при которых газы полученные от сгорания пороха расширятся позади БПЛА.
Разгон и вывод БПЛА из трубчатой пусковой установки под воздействием суммарной тяги газов метательного заряда производится давлением газов, образованных в результате сгорания пороха метательного заряда и оказываемых на БПЛА, происходит сдвигает БПЛА в канале трубчатой пусковой установки с места и его продвижение по каналу трубчатой пусковой установки к ее открытому срезу с непрерывно возрастающей скоростью и выбрасыванию БПЛА наружу по направлению оси канала трубчатой пусковой установки.
В момент времени советующий вершине баллистической траектории полета БПЛА, под действием пружинного механизма, производится разворачивание аэродинамических поверхностей БПЛА из положения, обеспечивающего создание вращающего момента по крену в рабочее положение, препятствующее созданию вращающего момента по крену, а также производится запуск маршевого двигателя БПЛА. В зависимости от схемы построения планера их может быть как один в самолетной схеме планера БПЛА, так и несколько в мультироторной схеме планера БПЛА.
БПЛА на собственном маршевом двигателе начинает движение для выполнения задач полетного задания.
Устройство, реализующее предлагаемый способ приведено на фиг. 2 и состоит из связанных между собой вновь введенного корпусированного метательного заряда (15), устройства позиционирования (16) (в графической части не показан), а также известных ранее трубчатой пусковой установки (13) с каналом в направлении ее продольной оси, БПЛА (14), удерживающего механизма (11) и спускового механизма (12) (в графической части не показан).
В конструкцию БПЛА (14), как минимум входят вновь введенный управляющий блок (17), а также ранее известный маршевый двигатель (18), аэродинамические поверхности (19), пружинный механизм (20) (фиг. 3).
При мультироторной схеме планера, БПЛА (14) содержит несколько маршевых двигателей (18) (фиг. 4).
Корпусированный метательный заряд (15), состоит из корпуса (21), воспламенителя (22), огневой связи (23) и метательного заряда (24). Также в него могут входить сопло (25), лопасти стабилизатора (26) и пружинный механизм (20) для их разворачивания (фиг.5).
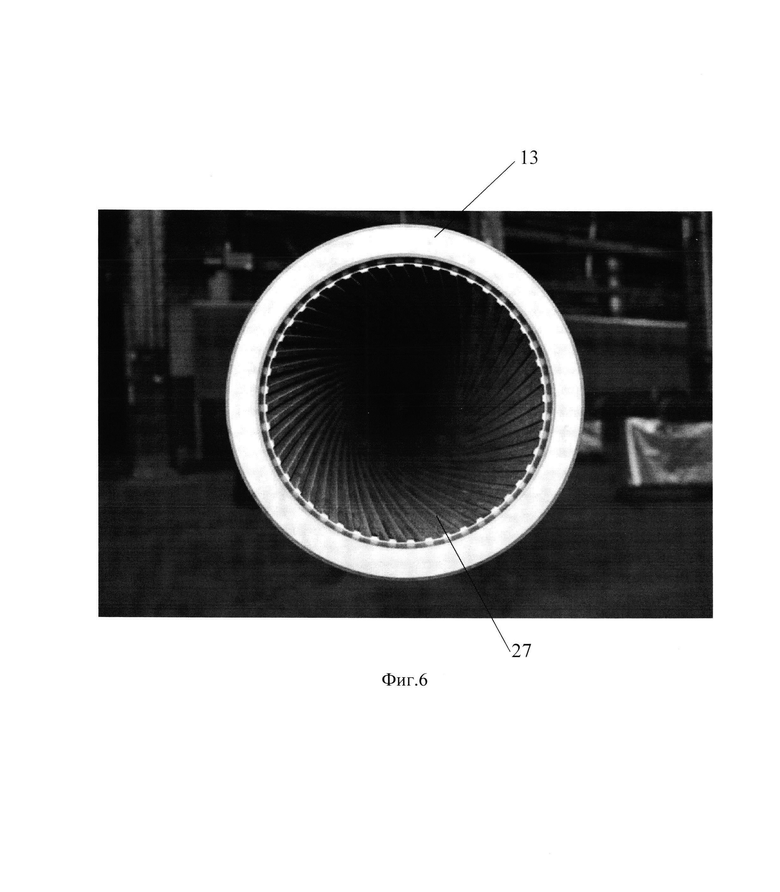
Трубчатая пусковая установка (13) содержать нарезы (27) (фиг.6), выполненные в виде полосовидных углублений, вьющихся вдоль стенок канала трубчатой пусковой установки (13).
В первом варианте устройство, реализующее предлагаемый способ, работает следующим образом:
Выполняется ориентация трубчатой пусковой установки (13), в сторону нормального полетного положения БПЛА (14) по направлению к потенциальной цели. Устройством позиционирования (16) производится установка угла возвышения трубчатой пусковой установки (13). В управляющий блок (17) БПЛА (14) вводится временная задержка, от момента покидания БПЛА (14) канала трубчатой пусковой установки (13) до момента советующего вершине баллистической траектории полета БПЛА (14), набор необходимых данных и команд для разворачивания его аэродинамических поверхностей в нормальное положение, запуска маршевого двигателя и выполнения задач специализированного назначения(полетное задание).
В канал трубчатой пусковой установки (13) устанавливается БПЛА (14), аэродинамические поверхности (19) которого находятся в положении, обеспечивающем создание вращающего момента по крену, то есть сложены, а за БПЛА (14) перед удерживающим механизмом (11) устанавливают корпусированный метательный заряд (15).
В канале трубчатой пусковой установки (13) удерживающим механизмом (11) производится препятствие радиальным смещениям корпусированного метательного заряда (15) в канале трубчатой пусковой установки (13).
Воздействие на спусковой механизм (12) приводит к срабатыванию воспламенителя (22), который через огневую связь (23) корпусированного метательного заряда (15) воспламеняет метательный заряд (24).
Начинается истечение сгорающих пороховых газов метательного заряда (24). Под действием давления сгорающих пороховых газов метательного заряда (24) в канале трубчатой пусковой установки (13) создается высокое давление на БПЛА (14) и корпус (21) корпусированного метательного заряда (15), а также на стенки трубчатой пусковой установки (13).
В результате давления сгорающих пороховых газов метательного заряда (24) на БПЛА (14) он сдвигается с места и врезается в нарезы (27) трубчатой пусковой установки (13) вращаясь по ним, продвигается по каналу трубчатой пусковой установки (13) с непрерывно возрастающей скоростью и выбрасывается наружу из канала трубчатой пусковой установки (13) по направлению оси ее канала.
От давления сгорающих пороховых газов метательного заряда (24) на корпус (21) корпусированного метательного заряда (15) и стенки трубчатой пусковой установки (13) происходит их растяжение (упругая деформация), и корпус (21) корпусированного метательного заряда (15), плотно прижимаясь к каналу трубчатой пусковой установки (13), препятствует прорыву пороховых газов в сторону затвора удерживающим механизмом (11) и его разрушения.
Давление сгорающих пороховых газов метательного заряда (24) на дно корпуса (21) корпусированного метательного заряда (15) через механическую связь оказывает воздействие на удерживающий механизм (11) и позволяет его открыть для повторного применения трубчатой пусковой установки (13).
После выхода БПЛА (14) из канала трубчатой пусковой установки (13) начинается его движение по баллистической траектории с сохранением вращающего момента по крену, заданного движением по нарезам (27) трубчатой пусковой установки (13).
В момент времени, советующий вершине баллистической траектории полета БПЛА (14), по команде его управляющего блока (17) пружинным механизмом (20) производится разворачивание аэродинамических поверхностей (19) из положения, обеспечивающего создание вращающего момента по крену в рабочее положение, препятствующее созданию вращающего момента по крену, выполняется запуск маршевого двигателя (18).
БПЛА (14) на собственном маршевом двигателе (18) начинает движения для выполнения задач введенного в управляющий блок (17) полетного задания.
Во втором варианте устройство, реализующее предлагаемый способ, работает следующим образом:
Выполняется ориентация трубчатой пусковой установки (13), в сторону нормального полетного положения БПЛА (14) по направлению к потенциальной цели.
Устройством позиционирования (16) производится установка угла возвышения трубчатой пусковой установки (13). В управляющий блок (17) БПЛА (14) вводятся: временная задержка, от момента покидания БПЛА (14) канала трубчатой пусковой установки (13) до момент соответствующего вершине баллистической траектории полета БПЛА (14), набор необходимых данных и команд для разворачивания его аэродинамических поверхностей в нормальное положение, запуска маршевого двигателя и выполнения задач специализированного назначения (полетное задание).
В канал трубчатой пусковой установки (13) устанавливается БПЛА (14), аэродинамические поверхности (19) которого находятся в положение, обеспечивающем создание вращающего момента по крену, то есть сложены.
В канал трубчатой пусковой установки (13) за БПЛА (14) устанавливается корпусированный метательный заряда (15), который крепится к БПЛА (14), а за БПЛА (14), перед удерживающим механизмом (11) устанавливают корпусированный метательный заряд (15), который крепят к БПЛА (14).
В канале трубчатой пусковой установки (13) удерживающим механизмом (11) производится препятствие радиальным смещениям корпусированного метательного заряда (15), закрепленного за БПЛА (14), в канале трубчатой пусковой установки (13).
Воздействие на спусковой механизм (12) приводит к срабатыванию воспламенителя (22), который через огневую связь (23) корпусированного метательного заряда (15) воспламеняет метательный заряд (24).
Начинается истечение сгорающих пороховых газов метательного заряда (24) через сопло (25) корпусированного метательного заряда (15). Под действием давления сгорающих пороховых газов метательного заряда (24) в канале трубчатой пусковой установки (13) разрушается удерживающий механизм (11) и воспламенитель (22), которые выбрасываются из канала трубчатой пусковой установки (13) в сторону противоположную направлению движения БПЛА (14), происходит сдвиг с места и движение с вращением по нарезам (27) канала трубчатой пусковой установки (13) с увеличивающейся скоростью БПЛА (14) с корпусированным метательным зарядом (15) приводящее к их дальнейшему выбрасыванию наружу из канала трубчатой пусковой установки (13).
При выбрасывании наружу из канала трубчатой пусковой установки (13) по направлению оси ее канала БПЛА (14) с корпусированным метательным зарядом (15), под действием пружинного механизма (20) происходит раскрытие лопастей стабилизатора (26) корпусированного метательного заряда (15) и начинается движение БПЛА (14) с корпусированным метательным зарядом (15) по баллистической траектории с сохранением вращающего момента по крену.
В момент времени советующий вершине баллистической траектории полета БПЛА (14) с корпусированным метательным зарядом (15), по команде управляющего блока (19) БПЛА (14) его пружинным механизмом (20) производит разворачивание аэродинамических поверхностей (19) из положения, обеспечивающего создание вращающего момента по крену в рабочее положение, препятствующее созданию вращающего момента по крену, выполняется запуск маршевого двигателя (18), а также отделение БПЛА (14) от корпусированного метательного заряда (15).
БПЛА (14) на собственном маршевом двигателе (18) начинает движение для выполнения задач введенного в управляющий блок (17) полетного задания.
Предложенный способ запуска беспилотного летательного аппарата, в отличие от способа-прототипа, за счет обеспечения движения БПЛА по баллистической траектории и разворачивания его аэродинамических поверхностей в рабочее (маршевое) положение, а также запуска его маршевого двигателя в момент соответствующий вершине баллистической траектории с дальней движением БПЛА, несущим ударную нагрузку на известные дальности выполнения полетного задания, обеспечивает улучшенные характеристики применения БПЛА, несущих ударную нагрузку, с авиационной или мультироторной схемой компоновкой планера.
Предложенное устройство в отличие от устройства, реализующего способ прототип согласно расчетным данным приведенных в таблице 2 дает возможность доставлять БПЛА с авиационной или мультироторной схемой компоновкой планера на дальности, превышающие их сегодня известные автономные дальности полета за минимальное время, что позволяет выполнять задачи специализированного назначения в точках, значительно более удаленных от текущих автономных дальностей полета БПЛА различного типа.
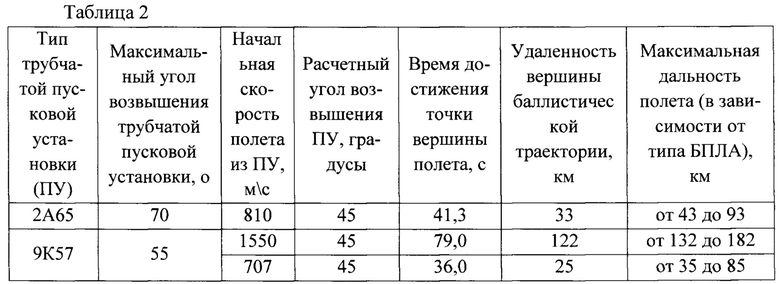
В целях практической реализации предложенного устройства, корпусированный метательный заряд (15) со всеми его компонентами может быть выполнен из серийно выпускаемых гильзы Г-35 для гаубицы калибра 152 мм типа 2А65 или ракетной части 9Д160 для снарядов реактивной системы залпового огня типа 9К57.
Источники информации:
1. Патент на изобретение РФ №2507468 «Способ пуска беспилотного летательного аппарата и реактивный комплекс для его реализации (варианты)», заявка 2012110331/11 от 20.03.2012, опубликовано 20.02.2014 Бюл. №5
2. Патент на изобретение РФ №2784099 «Способ запуска и управления полетом беспилотного летательного аппарата (БПЛА) с самолета-носителя», заявка 2022112533 от 05.05.2022, опубликовано: 23.11.2022 Бюл. №33
3. Патент на изобретение США №US7410124B2 «Легкий летательный аппарат и пневматическая пусковая установка», заявка US10/509,659 от 2004-02-19, опубликовано 2008-08-12
4. Оружие и технологии России: Энциклопедия XXI век., том III, «Вооружение военно-морского флота» - М.: Издат.дом "Оружие и технологии", 2001, стр. 97-102
5. Внешняя баллистика: учеб. пособие / А.В. Гуськов, К.Е. Милевский, А.В. Сотенко. - Новосибирск: Изд-во НГТУ, 2010. - 188 с
6. 55-я юбилейная научная конференция аспирантов, магистрантов и студентов Белорусский государственный университет информатики и радиоэлектроники // Компоновочные схемы беспилотных летательных аппаратов, 2019 г. URL: https://libeldoc.bsuir.by/bitstream/123456789/36951/1/Nguyen_Kompnovochnyye.pdf (Дата обращения: 14.01.2024).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И РЕАКТИВНЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2012 |
|
RU2507468C2 |
| СВЕРХЗВУКОВОЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РЕАЛИЗАЦИИ ЕГО ПОЛЕТА | 2015 |
|
RU2619361C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСФОРМИРУЕМЫЙ МНОГОРАЗОВЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ И СПОСОБЫ СТАРТА | 2022 |
|
RU2778177C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| Многоразовый беспилотный летательный аппарат в транспортно-пусковом контейнере и способ старта многоразового беспилотного летательного аппарата из транспортно-пускового контейнера | 2019 |
|
RU2714616C1 |
| БПЛА из унифицированных деталей и узлов и способ его изготовления | 2023 |
|
RU2812011C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
Изобретение относится к беспилотным летательным аппаратам. Способ запуска беспилотного летательного аппарата (1) заключается в том, что выполняют ориентацию трубчатой пусковой установки (2) в азимутальной и угломестной плоскостях. В бортовую аппаратуру БПЛА выполняют ввод полетного задания, включающего время достижения БПЛА вершины баллистической траектории полета. При этом выполняется установка корпусированного метательного заряда в канал трубчатой пусковой установки за БПЛА, обтюрация, разгон и вывод БПЛА (1) из трубчатой пусковой установки (2) под воздействием суммарной тяги газов метательного заряда. В момент времени, соответствующего вершине баллистической траектории полета, производится запуск маршевых двигателей БПЛА. Достигается повышение оперативности и точности наведения. 2 н. и 2 з.п. ф-лы, 6 ил., 2 табл.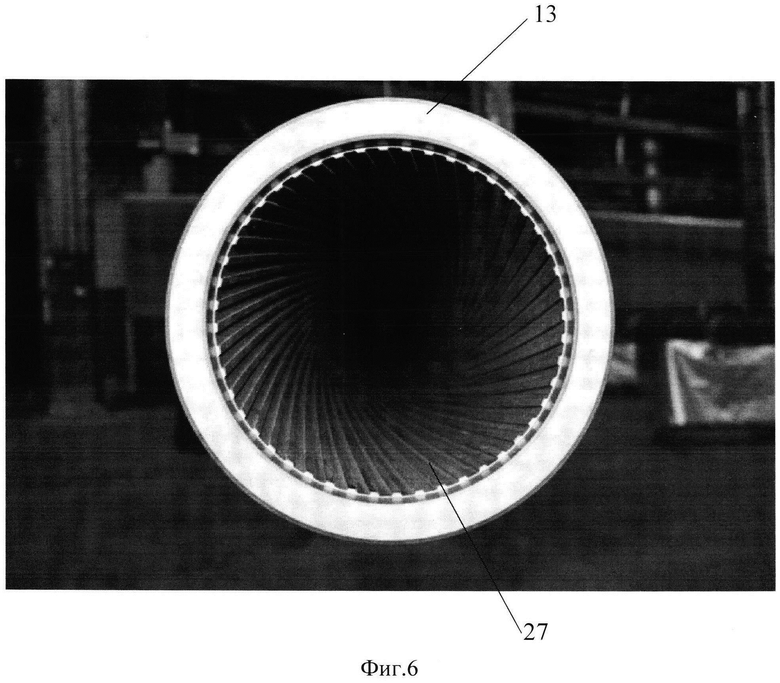
1. Способ запуска беспилотного летательного, заключающийся в том, что беспилотный летательный аппарат с полностью сложенными аэродинамическими поверхностями размещают в трубчатой пусковой установке, удерживают его в трубчатой пусковой установке, расфиксируют крепления беспилотного летательного аппарата, наполняют пусковым газом трубчатую пусковую установку, прилагают усилие пускового газа для разгона беспилотного летательного аппарата, отделяют беспилотный летательный аппарат от трубчатой пусковой установки и разворачивают аэродинамические поверхности беспилотного летательного аппарата в рабочее положение, отличающийся тем, что перед размещением беспилотного летательного аппарата с полностью сложенными аэродинамическими поверхностями в трубчатой пусковой установке выполняют ориентацию трубчатой пусковой установки в азимутальной и угломестной плоскостях, в бортовую аппаратуру беспилотного летательного аппарата выполняют ввод полетного задания, включающего, в частности, время достижения беспилотным летательным аппаратом вершины баллистической траектории полета, а после размещения беспилотного летательного аппарата с полностью сложенными аэродинамическими поверхностями в трубчатой пусковой установке выполняют установку корпусированного метательного заряда в канал трубчатой пусковой установки за беспилотным летательным аппаратом, после чего происходит обтюрация, разгон и вывод беспилотного летательного аппарата из трубчатой пусковой установки под воздействием суммарной тяги газов метательного заряда, разворачивание аэродинамических поверхностей в рабочее положение беспилотного летательного аппарата выполняют в момент времени, соответствующий вершине баллистической траектории полета, запуск маршевого двигателя беспилотного летательного аппарата выполняют в момент времени, соответствующий вершине баллистической траектории полета.
2. Устройство запуска беспилотного летательного аппарата, состоящее из связанных между собой трубчатой пусковой установки с каналом в направлении ее продольной оси, удерживающего механизма и спускового механизма, отличающееся тем, что дополнительно введены корпусированный метательный заряд, содержащий сам метательный заряд, корпус, воспламенитель и огневую связь, и устройство позиционирования для позиционирования в азимутальной и угломестной плоскостях трубчатой пусковой установки.
3. Устройство по п. 2, отличающееся тем, что корпусированный метательный заряд содержит сопло, лопасти стабилизатора и пружинный механизм, при этом корпусированный метательный заряд выполнен с возможностью соединения с беспилотным летательным аппаратом.
4. Устройство по п. 3, отличающееся тем, что метательный заряд выполнен из пороха, а трубчатая пусковая установка на внутренней поверхности содержит нарезы.
| US 7410124 B2, 12.08.2008 | |||
| СТВОЛЬНОЕ ПУСКОВОЕ УСТРОЙСТВО, СНАРЯД И СПОСОБ РАЗМЕЩЕНИЯ СНАРЯДА В УСТРОЙСТВЕ | 2023 |
|
RU2812817C1 |
| US 11040772 B2, 22.06.2021. | |||

